






专利摘要
用于公路的临时道路交通指挥机器人,包括后立板和电气控制箱,所述支杆的底端安装有旋转台,在旋转台的底侧安装有旋转电机底座,且旋转电机底座内的电机轴与旋转台进行传动连接;所述支杆的轴壁上安装有读秒器,且在读秒器的左右两侧分别连接有左支体和右支体,且在左支体的前端面上和右支体的后端面上还分别安装有收板盒,且此动作的实施完全靠雨水传感器进行感应,利用控制器进行控制,使电机带动双向螺杆控制双层板件进行自动开合,使机器人达到自动控制的目的,此结构打开后可增加机器人顶部的遮挡面积,在下雨时雨水传感器可将接收的雨水信号传送到小型马达上,使小型马达带动双向螺杆控制双层板件实现自动闭合动作。
权利要求
1.用于公路的临时道路交通指挥机器人,其特征在于:所述的用于公路的临时道路交通指挥机器人包括有:读秒器、左支体、右支体、左指示灯、右指示灯、旋转电机底座、旋转台、支杆、遮板、RY-YX雨水传感器、收板盒、抽板、摄像头、外沿板、滑板、后立板、电气控制箱、插盒、小型马达、双向螺杆、接触开关、支撑杆、滑动轮和螺杆滑动杆;
所述支杆的底端安装有旋转台,在旋转台的底侧安装有旋转电机底座,且旋转电机底座内的电机 轴与旋转台进行传动连接;所述支杆的轴壁上安装有读秒器,且在读秒器的左右两侧分别连接有左支体和右支体,且在左支体的前端面上和右支体的后端面上还分别安装有一处收板盒,并且在收板盒中均滑动安装有一处抽板,同理,在左支体的前端面上和右支体的后端面上还分别利用安装槽的方式各安装有一处摄像头,且摄像头位于收板盒的内侧;所述左支体和右支体的顶面上还分别安装有左指示灯和右指示灯;所述支杆后侧杆壁上安装有一块长方形结构的后立板,且后立板的右端面的顶侧分别安装有一处电气控制箱和一处滑板;所述滑板的内腔中利用滑轮滑动安装有一组可进行打开或闭合的遮板,且遮板的顶面坐落安装有RY-YX雨水传感器;所述遮板的底面安装有一处外沿板;所述读秒器、左指示灯、右指示灯、摄像头、RY-YX雨水传感器以及旋转电机底座内的电机均与电气控制箱进行电性连接。
2.根据权利要求1所述的用于公路的临时道路交通指挥机器人,其特征在于:所述遮板为双层板件组成的组合体结构,其中外沿板就是安装在每块板件的底面三个边上。
3.根据权利要求1或2所述的用于公路的临时道路交通指挥机器人,其特征在于:所述遮板内安装有小型马达与双向螺杆,以及接触开关,此小型马达与接触开关、RY-YX雨水传感器进行电性连接,并通过电气控制箱内的BZ2046微控制器进行信号控制。
4.根据权利要求1或2或3所述的用于公路的临时道路交通指挥机器人,其特征在于:所述遮板的底面均设有两根带滑动轮的支撑杆,此支撑杆通过滑轮与滑板内腔底面的滑槽进行滑动连接。
5.根据权利要求1所述的用于公路的临时道路交通指挥机器人,其特征在于:所述收板盒为一个带滑槽的盒体结构,此盒体结构内滑动安装有带滑轨的抽板,并且抽板抽出时,对应的左支体和右支体的外侧还有一处结构与收板盒相对应的插盒,且在插盒内设有限位块。
说明书
技术领域
本发明涉及交通机器人结构技术领域,尤其涉及用于公路的临时道路交通指挥机器人。
背景技术
本发明人发现,现有的交通机器人,由于没有防雨结构,其在频繁的在雨天中使用会影响其使用寿命,且安装的摄像监控装置往往与指挥方向相一致,其在监控摄像的过程中后侧方位监控效果差,且监控结构使用完毕后直接裸露在外面一旦与硬性物体发生碰撞及易造成破坏。
于是,发明人有鉴于此,针对现有的结构及缺失予以研究改良,提供一种双向摄像功能且具有自动感应挡雨功能的临时道路交通指挥机器人,以期达到更具有更加实用价值性的目的。
发明内容
本发明的目的在于提供用于公路的临时道路交通指挥机器人,以解决上述背景技术中提出的现有的交通机器人,由于没有防雨结构,其在频繁的在雨天中使用会影响其使用寿命,且安装的摄像监控装置往往与指挥方向相一致,其在监控摄像的过程中后侧方位监控效果差,且监控结构使用完毕后直接裸露在外面一旦与硬性物体发生碰撞及易造成破坏的问题。
本发明用于公路的临时道路交通指挥机器人的目的与功效,由以下具体技术手段所达成:
用于公路的临时道路交通指挥机器人,其中,该用于公路的临时道路交通指挥机器人包括有:
读秒器、左支体、右支体、左指示灯、右指示灯、旋转电机底座、旋转台、支杆、遮板、RY-YX雨水传感器、收板盒、抽板、摄像头、外沿板、滑板、后立板、电气控制箱、插盒、小型马达、双向螺杆、接触开关、支撑杆、滑动轮和螺杆滑动杆;
所述支杆的底端安装有旋转台,在旋转台的底侧安装有旋转电机底座,且旋转电机底座内的电机轴与旋转台进行传动连接;所述支杆的轴壁上安装有读秒器,且在读秒器的左右两侧分别连接有左支体和右支体,且在左支体的前端面上和右支体的后端面上还分别安装有一处收板盒,并且在收板盒中均滑动安装有一处抽板,同理,在左支体的前端面上和右支体的后端面上还分别利用安装槽的方式各安装有一处摄像头,且摄像头位于收板盒的内侧;所述左支体和右支体的顶面上还分别安装有左指示灯和右指示灯;所述支杆后侧杆壁上安装有一块长方形结构的后立板,且后立板的右端面的顶侧分别安装有一处电气控制箱和一处滑板;所述滑板的内腔中利用滑轮滑动安装有一组可进行打开或闭合的遮板,且遮板的顶面坐落安装有RY-YX雨水传感器;所述遮板的底面安装有一处外沿板;所述读秒器、左指示灯、右指示灯、摄像头、RY-YX雨水传感器以及旋转电机底座内的电机均与电气控制箱进行电性连接。
进一步的,所述遮板为双层板件组成的组合体结构,其中外沿板就是安装在每块板件的底面三个边上。
进一步的,所述遮板内安装有小型马达与双向螺杆,以及接触开关,此小型马达与接触开关、RY-YX雨水传感器进行电性连接,并通过电气控制箱内的BZ2046微控制器进行信号控制。
进一步的,所述遮板的底面均设有两根带滑动轮的支撑杆,此支撑杆通过滑轮与滑板内腔底面的滑槽进行滑动连接。
进一步的,所述收板盒为一个带滑槽的盒体结构,此盒体结构内滑动安装有带滑轨的抽板,并且抽板抽出时,对应的左支体和右支体的外侧还有一处结构与收板盒相对应的插盒,且在插盒内设有限位块。
与现有结构相较之下,本发明具有如下优点:
1.在装置的最顶端安装有一处遮板,此遮板为组合体结构,为双层板件进行组合的滑动体,此组件利用反向螺杆实现开合动作,且此动作的实施完全靠雨水传感器进行感应,利用控制器进行控制,使电机带动双向螺杆控制双层板件进行自动开合,使机器人达到自动控制的目的,此结构打开后可增加机器人顶部的遮挡面积,在下雨时雨水传感器可将接收的雨水信号传送到小型马达上,使小型马达带动双向螺杆控制双层板件实现自动闭合动作。
2.安装的摄像头位置安装有遮挡结构,利用此结构的遮挡件可对使用完毕的摄像头进行遮盖,防止其使用完毕后与硬性物件发生碰撞而引起损坏,与其它摄像头安装方式不同的是,本设计中的摄像头为两处,分别安装在机器人的丙支手臂的前后两侧,即一处安装在一支手臂的前侧,一处安装在一支手臂的后侧,就形成了可以进行前后方位同时摄像的功能,提高了监控范围。
附图说明
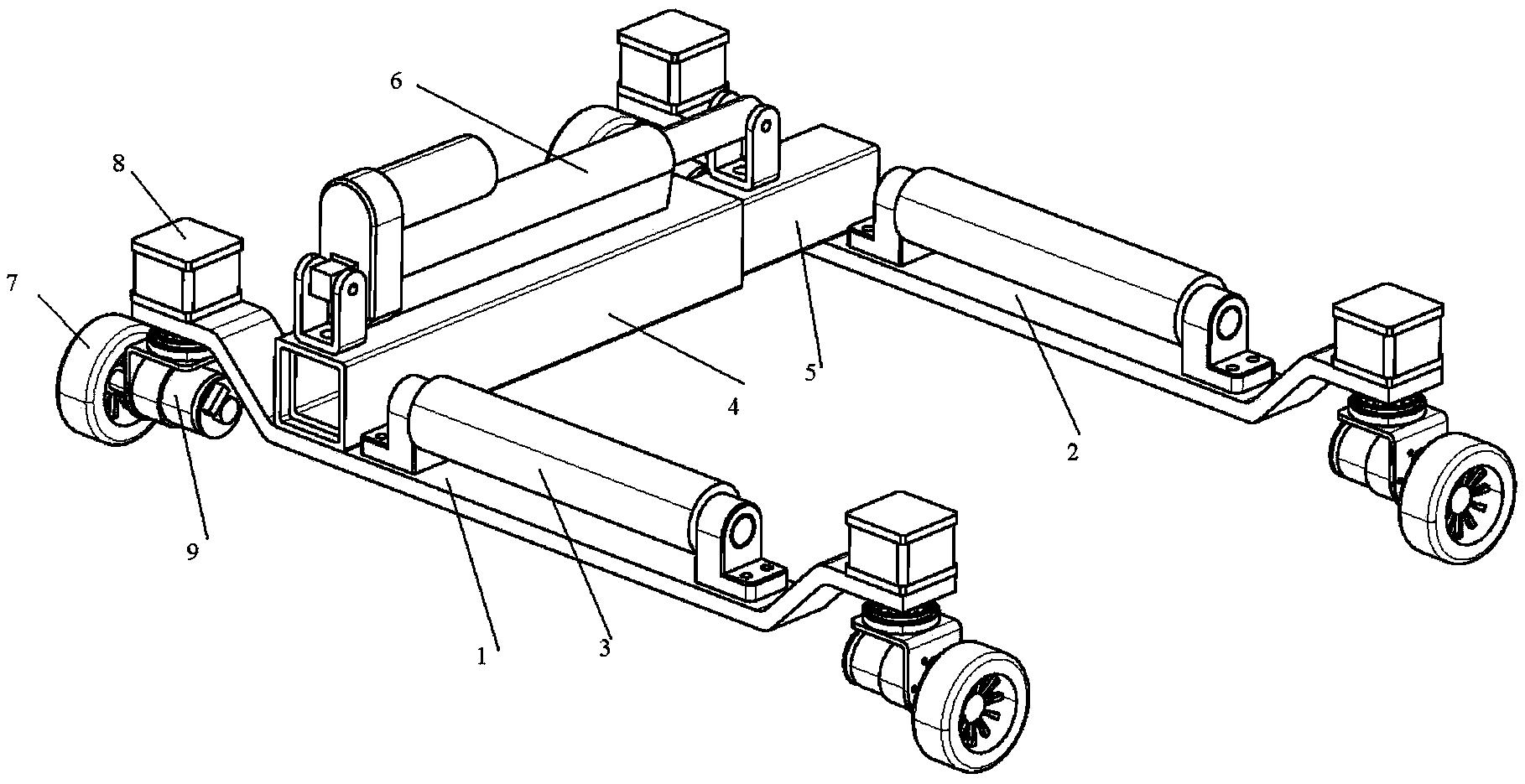
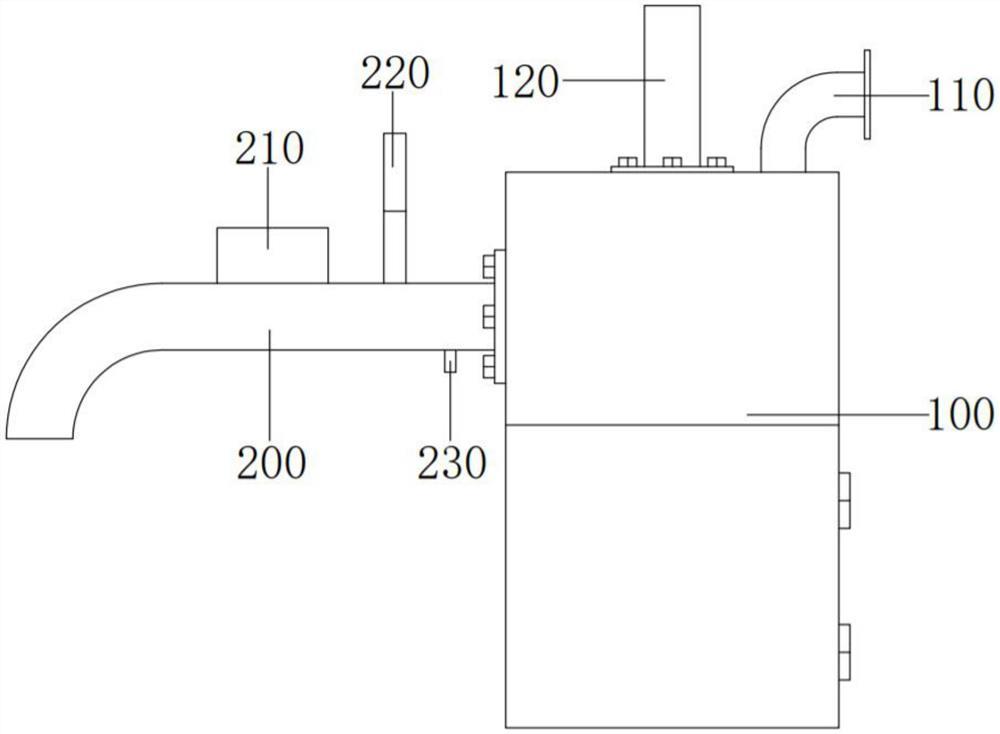
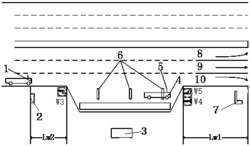
图1为本发明结构示意图;
图2为本发明遮板与滑板安装后左视结构示意图;
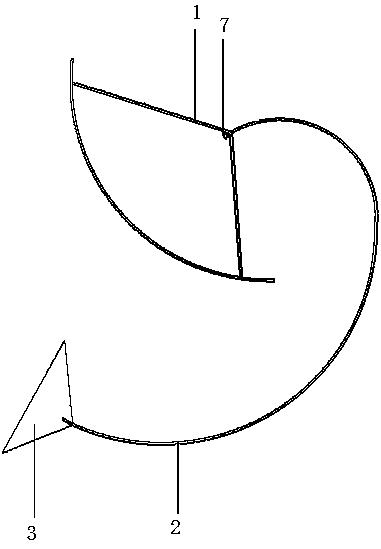
图3为本发明遮板及与其连接的组件轴测示意图(外沿板不带,便于读图);
图4为本发明接触开关、支撑杆以及滑动轮结构位置示意图;
图5为本发明小型马达、双向螺杆以及螺杆滑动杆结构位置示意图;
图6为本发明收板盒侧面结构示意图;
图7为本发明插盒侧面结构示意图。
图中:1、读秒器,2、左支体,3、右支体,4、左指示灯,5、右指示灯,6、旋转电机底座,7、旋转台,8、支杆,9、遮板,10、RY-YX雨水传感器,11、收板盒,12、抽板,13、摄像头,14、外沿板,15、滑板,16、后立板,17、电气控制箱,18、插盒,19、小型马达,20、双向螺杆,21、接触开关,22、支撑杆,23、滑动轮,24、螺杆滑动杆。
具体实施方式
下面,将详细说明本发明的实施例,其实例显示在附图和以下描述中。虽然将结合示例性的实施例描述本发明,但应当理解该描述并非要把本发明限制于该示例性的实施例。相反,本发明将不仅覆盖该示例性的实施例,而且还覆盖各种替换的、改变的、等效的和其他实施例,其可包含在所附权利要求所限定的本发明的精神和范围内。
参见图1至附图7,用于公路的临时道路交通指挥机器人,包括有:
读秒器1、左支体2、右支体3、左指示灯4、右指示灯5、旋转电机底座6、旋转台7、支杆8、遮板9、RY-YX雨水传感器10、收板盒11、抽板12、摄像头13、外沿板14、滑板15、后立板16、电气控制箱17、插盒18、小型马达19、双向螺杆20、接触开关21、支撑杆22、滑动轮23和螺杆滑动杆24;
支杆8的底端安装有旋转台7,在旋转台7的底侧安装有旋转电机底座6,且旋转电机底座6内的电机 轴与旋转台7进行传动连接;支杆8的轴壁上安装有读秒器1,且在读秒器1的左右两侧分别连接有左支体2和右支体3,且在左支体2的前端面上和右支体3的后端面上还分别安装有一处收板盒11,并且在收板盒11中均滑动安装有一处抽板12,同理,在左支体2的前端面上和右支体3的后端面上还分别利用安装槽的方式各安装有一处摄像头13,且摄像头13位于收板盒1的内侧;左支体2和右支体3的顶面上还分别安装有左指示灯4和右指示灯5;支杆8后侧杆壁上安装有一块长方形结构的后立板16,且后立板16的右端面的顶侧分别安装有一处电气控制箱17和一处滑板15;滑板15的内腔中利用滑轮滑动安装有一组可进行打开或闭合的遮板9,且遮板9的顶面坐落安装有RY-YX雨水传感器10;遮板9的底面安装有一处外沿板14;读秒器1、左指示灯4、右指示灯5、摄像头13、RY-YX雨水传感器10以及旋转电机底座6内的电机均与电气控制箱17进行电性连接。
如上述所述的用于公路的临时道路交通指挥机器人的较佳实施例,其中,遮板9为双层板件组成的组合体结构,打开时可以延长其伸展长度,对机器人装置顶部进行遮盖,并利用外沿板14进行强化挡雨。
如上述所述的用于公路的临时道路交通指挥机器人的较佳实施例,其中,遮板9内腔滑板15的顶面上安装有一处小型马达19,小型马达19为双向马达,其两端安装有双向螺杆20,在两根双向螺杆20上还均滑动连接有一根螺杆滑动杆24,在滑板15的滑槽内双头各安装有一处接触开关21,此小型马达19与接触开关21、RY-YX雨水传感器10进行电性连接,并通过电气控制箱17内的BZ2046微控制器进行信号控制,RY-YX雨水传感器10接收雨天信号将信号传送到BZ2046微控制器上,BZ2046微控制器将接收的信号根据编码信息向小型马达19发出指令,使小型马达19带动双向螺杆20进行旋转,使遮板9实现张开动作,同时遮板9张开到与接触开关21接触时,接触开关21控制小型马达使其停转,完成一个遮雨张开动作。
如上述所述的用于公路的临时道路交通指挥机器人的较佳实施例,其中,遮板9的底面均设有两根带滑动轮23的支撑杆22,此支撑杆22通过滑轮23与滑板15内腔底面的滑槽进行滑动连接,使遮板9利用支撑杆22与滑轮23滑槽的作用实现开合动作;
如上述所述的用于公路的临时道路交通指挥机器人的较佳实施例,其中,收板盒11为一个带滑槽的盒体结构,此盒体结构内滑动安装有带滑轨的抽板12,并且抽板12抽出时,对应的左支体2和右支体3的外侧还有一处结构与收板盒11相对应的插盒18,且在插盒18内设有用于防止抽板12过渡抽出的限位块,将抽板12向插盒18方向抽出插入后,将左右支体槽内安装的摄像头13进行遮盖,避免碰撞。
本实施例的工作原理:
小型马达19动作时,其双头的双向螺杆20发放互反方向旋转,使通过螺杆滑动杆24与之连接在一起的遮板9上的两片板件在支撑杆22和滑动轮23的协助滑动下,发生反向运动,使遮板9、实现张开动作,直至支撑杆22或滑动轮23与接触开关21发生接触,使小型马达19被电气控制箱17、内的BZ2046微控制器控制发生停转,完成一次开张开遮雨动作。
综上所述,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
用于公路的临时道路交通指挥机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0