

IPC分类号 : B23Q37/00,B23Q1/26,B23Q5/40,G09B19/00,B26F1/44,B26F1/38,B26D5/06,B26D5/08,B26D7/26







专利摘要
本实用新型公开了一种微型五轴数控机床,涉及数控机床设备制造技术领域,所述数控机床包括底座、支撑架、Z轴装置、Y轴装置、X轴装置、B轴装置及C轴旋转工作台;所述X轴方向、Y轴方向和Z轴方向两两相互垂直。本申请的微型五轴数控机床对现有的五轴数控机床进行了简化,使机床整体结构简单,体积小,成本低,功能全,惯性小,制造装配方便,具备五轴加工能力。
权利要求
1.一种微型五轴数控机床,其特征在于,所述数控机床包括:
底座(7)、支撑架(1),用于对整个数控机床进行支撑;
Z轴装置(4),设置在所述底座(7)上,用于控制C轴旋转工作台(5)在Z轴方向上的移动;
Y轴装置(3),设置在所述支撑架(1)顶部,用于控制B轴装置(6)在Y轴方向上的移动;
X轴装置(2),固定在所述Y轴装置(3)上,用于控制刀具在X轴方向上的移动;
B轴装置(6);固定在所述X轴装置(2)上,用于控制电主轴(63)的摆动;及
C轴旋转工作台(5),用于对工件进行固定;
所述X轴方向、Y轴方向和Z轴方向两两相互垂直。
2.根据权利要求1所述的微型五轴数控机床,其特征在于,所述B轴装置(6)包括电主轴(63)、电主轴支座(64)、摆动减速器(62)、摆动电机(61)、锥齿轮(621)和同步传动带(622),所述电主轴(63)通过电主轴支座(64)与锥齿轮(621)的从传动轮连接,所述摆动减速器(62)的一端与锥齿轮(621)的主传动轮连接,所述摆动减速器(62)的另一端与摆动电机(61)通过所述同步传动带(622)连接。
3.根据权利要求1所述的微型五轴数控机床,其特征在于,所述Z轴装置(4)包括:Z轴滑块(45)、Z轴滚珠丝杠(44)、Z轴滑轨(46)和Z轴驱动装置(40);所述Z轴滑块(45)通过所述Z轴滚珠丝杠(44)和Z轴滑轨(46)设置在所述底座(7)与所述支撑架(1)顶板之间,所述Z轴滑轨(46)一端固定在所述支撑架(1)顶部,另一端与所述底座(7)固定连接;所述Z轴滚珠丝杠(44)一端与所述底座(7)螺纹连接,另一端穿过支撑架(1)顶部与所述Z轴驱动装置(40)连接;所述Z轴滑块(45)内设置有第一驱动电机(51)、第一减速器和支撑板(53),所述C轴旋转工作台(5)设置在所述支撑板(53)上;所述第一驱动电机(51)通过联轴器与第一减速器连接,所述第一减速器的输出轴穿过所述支撑板(53)与所述C轴旋转工作台(5)连接。
4.根据权利要求3所述的微型五轴数控机床,其特征在于,所述Z轴驱动装置(40)设置在所述支撑架(1)顶部,所述Z轴驱动装置(40)包括第二驱动电机(400)、第一主传动轮(401)、第一从传动轮(403)和第一同步带(402),所述第一主传动轮(401)通过第一联轴器与所述第二驱动电机(400)连接,所述第一从传动轮(403)与所述第一主传动轮(401)通过所述第一同步带(402)连接,所述第一从传动轮(403)与所述Z轴滚珠丝杠(44)通过第一键槽连接。
5.根据权利要求1所述的微型五轴数控机床,其特征在于,所述Y轴装置(3)包括Y轴滑块(31)、Y轴驱动装置(32),Y轴滑轨(37),Y轴滚珠丝杠(34);所述Y轴滑轨(37)一端固定在所述Y轴滑块(31)靠近所述Y轴驱动装置(32)一端侧壁,另一端穿过所述支撑架(1)顶部并与所述Y轴滑块(31)远离所述Y轴驱动装置(32)的一端侧壁固定连接,所述Y轴滚珠丝杠(34)平行设置在两个Y轴滑轨(37)之间,一端穿过所述Y轴滑块(31)侧壁与所述Y轴驱动装置(32)连接,另一端穿过所述支撑架(1)顶部和与所述Y轴滑块(31)另一侧壁连接。
6.根据权利要求5所述的微型五轴数控机床,其特征在于,所述Y轴驱动装置(32)设置在所述Y轴滑块(31)上,所述Y轴驱动装置(32)包括第三驱动电机(320)、第二主传动轮(321)、第二从传动轮(323)和第二同步带(322);所述第二主传动轮(321)通过第二联轴器与第三驱动电机(320)连接,第二从传动轮(323)与第二主传动轮(321)通过第二同步带(322)连接,所述第二从传动轮(323)与Y轴滚珠丝杠(34)通过第二键槽连接。
7.根据权利要求5所述的微型五轴数控机床,其特征在于,所述X轴装置(2)包括X轴驱动装置(21)、X轴滑轨(22)、X轴滑块(25)和X轴滚珠丝杠(24);所述X轴滑块(25)通过所述X轴滑轨(22)和所述X轴滚珠丝杠(24)设置在所述Y轴滑块(31)上;所述X轴滑轨(22)两端分别固定设置在所述Y轴滑块(31)的两侧,所述X轴滚珠丝杠(24)平行设置在两个X轴滑轨(22)之间,所述X轴滚珠丝杠(24)一端与所述Y轴滑块(31)远离所述X轴驱动装置(21)的侧壁连接,另一端穿过所述Y轴滑块(31)侧壁与所述X轴驱动装置(21)连接。
8.根据权利要求7所述的微型五轴数控机床,其特征在于,所述X轴驱动装置(21)设置在所述Y轴滑块(31)上;所述X轴驱动装置(21)包括第四驱动电机(213)、第三主传动轮(214)、第三从传动轮(211)和第三同步带(212);所述第三主传动轮(214)通过第三联轴器与所述第四驱动电机(213)连接,所述第三从传动轮(211)与所述第三主传动轮(214)通过第三同步带(212)连接,所述第三从传动轮(211)与X轴滚珠丝杠(24)通过第三键槽连接。
9.根据权利要求1所述的微型五轴数控机床,其特征在于,所述C轴旋转工作台(5)为设置有带T型槽的圆形工作台,其半径为75mm。
10.根据权利要求1所述的微型五轴数控机床,其特征在于,所述底座(7)上还设置有螺栓孔。
说明书
技术领域
本实用新型涉及数控机床设备制造技术领域,具体涉及一种微型五轴数控机床。
背景技术
随着科技的不断进步,五轴机床在医疗器械、航空航天、军事工业等领域有着广泛的应用,对五轴机床的需求及对五轴机床操作工的需求不断增大。但是大型五轴数控机床体积庞大、价格昂贵,一般的小型企业及院校缺乏足够的资金进行大量购置,导致实习实训时需多人使用一台机床,教学质量无法提高;另外,在五轴加工中,若程序等出现问题,会使机床发生碰撞,造成严重损失。因此,该类型机床不适合培训机构、初学者、学生或是小型企业的试件加工等。
发明内容
本实用新型针对上述问题,提供一种微型五轴数控机床,该五轴数控机床的一个旋转轴位于主轴头的刀具一侧,另一个旋转轴在工作台工件一侧,两个旋转运动由刀具和工作台分别执行,于是两个旋转轴在空间的方向上都是固定的,由于两个旋转运动没有复合在一起,所以这种结构的五轴机床结构简单、刚性好,适用于加工中小尺寸的零件,例如石蜡、塑料、尼龙等易加工材料,尺寸相对较小,加工容易进行,能耗低,加工故障率低。
本实用新型的技术方案为:一种微型五轴数控机床,所述数控机床包括:
底座、支撑架,用于对整个数控机床进行支撑;
Z轴装置,设置在所述底座上,用于控制C轴旋转工作台在Z轴方向上的移动;
Y轴装置,设置在所述支撑架顶部,用于控制B轴装置在Y轴方向上的移动;
X轴装置,固定在所述Y轴装置上,用于控制刀具在X轴方向上的移动;
B轴装置;固定在所述X轴装置上,用于控制电主轴的摆动;及
C轴旋转工作台,用于对工件进行固定;
所述X轴方向、Y轴方向和Z轴方向两两相互垂直。
进一步地,所述B轴装置包括电主轴、电主轴支座、摆动减速器、摆动电机、锥齿轮和同步传动带,所述电主轴通过电主轴支座与锥齿轮的从传动轮连接,所述摆动减速器的一端与锥齿轮的主传动轮连接,所述摆动减速器的另一端与摆动电机通过所述同步传动带连接;
更进一步地,所述Z轴装置包括:Z轴滑块、Z轴滚珠丝杠、Z轴滑轨和Z轴驱动装置;所述Z轴滑块通过所述Z轴滚珠丝杠和Z轴滑轨设置在所述底座与所述支撑架顶板之间,所述Z轴滑轨一端固定在所述支撑架顶部,另一端与所述底座固定连接;所述Z轴滚珠丝杠一端与所述底座螺纹连接,另一端穿过支撑架顶部与所述Z轴驱动装置连接;所述Z轴滑块内设置有第一驱动电机、第一减速器和支撑板,所述C轴旋转工作台设置在所述支撑板上;所述第一驱动电机通过联轴器与第一减速器连接,所述第一减速器的输出轴穿过所述支撑板与所述C轴旋转工作台连接。
更进一步地,所述Z轴驱动装置设置在所述支撑架顶部,所述Z轴驱动装置包括第二驱动电机、第一主传动轮、第一从传动轮和第一同步带,所述第一主传动轮通过第一联轴器与所述第二驱动电机连接,所述第一从传动轮与所述第一主传动轮通过所述第一同步带连接,所述第一从传动轮与所述Z轴滚珠丝杠通过第一键槽连接。
更进一步地,所述Y轴装置包括Y轴滑块、Y轴驱动装置,Y轴滑轨,Y轴滚珠丝杠;所述Y轴滑轨一端固定在所述Y轴滑块靠近所述Y轴驱动装置一端侧壁,另一端穿过所述支撑架顶部并与所述Y轴滑块远离所述Y轴驱动装置的一端侧壁固定连接,所述Y轴滚珠丝杠平行设置在两个Y轴滑轨之间,一端穿过所述Y轴滑块侧壁与所述Y轴驱动装置连接,另一端穿过所述支撑架顶部和与所述Y轴滑块另一侧壁连接。
更进一步地,所述Y轴驱动装置设置在所述Y轴滑块上,所述Y轴驱动装置包括第三驱动电机、第二主传动轮、第二从传动轮和第二同步带;所述第二主传动轮通过第二联轴器与第三驱动电机连接,第二从传动轮与第二主传动轮通过第二同步带连接,所述第二从传动轮与Y轴滚珠丝杠通过第二键槽连接。
更进一步地,所述X轴装置包括X轴驱动装置、X轴滑轨、X轴滑块和X轴滚珠丝杠;所述X轴滑块通过所述X轴滑轨和所述X轴滚珠丝杠设置在所述Y轴滑块上;所述X轴滑轨两端分别固定设置在所述Y轴滑块的两侧,所述X轴滚珠丝杠平行设置在两个X轴滑轨之间,所述X轴滚珠丝杠一端与所述Y轴滑块远离所述X轴驱动装置的侧壁连接,另一端穿过所述Y轴滑块侧壁与所述X轴驱动装置连接。
更进一步地,所述X轴驱动装置设置在所述Y轴滑块上;所述X轴驱动装置包括第四驱动电机、第三主传动轮、第三从传动轮和第三同步带;所述第三主传动轮通过第三联轴器与所述第四驱动电机连接,所述第三从传动轮与所述第三主传动轮通过第三同步带连接,所述第三从传动轮与X轴滚珠丝杠通过第三键槽连接。
更进一步地,所述C轴旋转工作台为设置有带T型槽的圆形工作台,其半径为75mm。
更进一步地,所述底座上还设置有螺栓孔。
本实用新型的优点:
首先,本申请的微型五轴数控机床对现有的五轴数控机床进行简化,使机床整体结构简化,体积小,成本低,功能全,惯性小,制造装配方便,具备五轴加工能力,解决大多数在校学生需要多人操作一台五轴数控机床的难题,也提高了五轴数控技术的教学质量,同时还解决小型企业首件试切和小型零件的单件或小批量生产问题。
其次,本申请的五轴数控机床结构简单、刚性好,适用于加工中等尺寸大小的零件,例如石蜡、塑料、尼龙等易加工材料,尺寸相对较小,加工容易进行,能耗低,加工故障率低。
除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
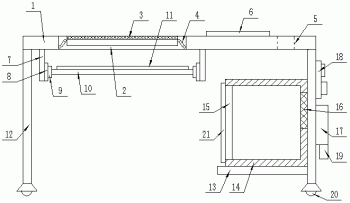
图1是本实用新型实施例的一种微型五轴数控机床的结构示意图;
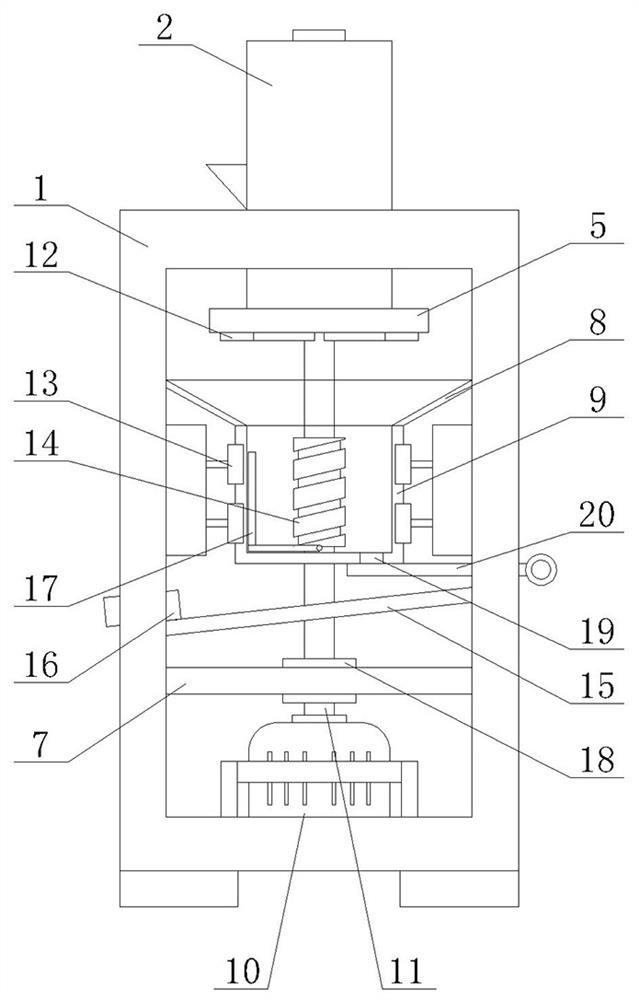
图2是本实用新型实施例的一种微型五轴数控机床Z轴装置示意图;
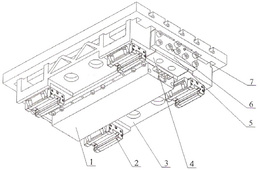
图3是本实用新型实施例的一种微型五轴数控机床的Y轴装置仰视图;
图4是本实用新型实施例的一种微型五轴数控机床B轴装置的结构示意图。
附图标记:
1为支撑架、2为X轴装置、21为X轴驱动装置、211为第三从传动轮、212为第三同步带、213为第四驱动电机、214为第三主传动轮、22为X轴滑轨、24为X轴滚珠丝杠、25为X轴滑块、3为Y轴装置、31为Y轴滑块、32为Y轴驱动装置、320为第三驱动电机、321为第二主传动轮、322为第二同步带、323为第二从传动轮、34为Y轴滚珠丝杠、37为Y轴滑轨、4为Z轴装置、40为Z轴驱动装置、400为第二驱动电机、401为第一主传动轮、402为第一同步带、403为第一从传动轮、44为Z轴滚珠丝杠、45为Z轴滑块、46为Z轴滑轨、5为C轴旋转工作台、51为第一驱动电机、53为支撑板、6为B轴装置、61为摆动电机、62为摆动减速器、63为电主轴、64为电主轴支座、621为锥齿轮、622为同步传动带、7为底座。
具体实施方式
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
需要说明的是,当元件被称为“设置有”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“上”“下”“左”“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
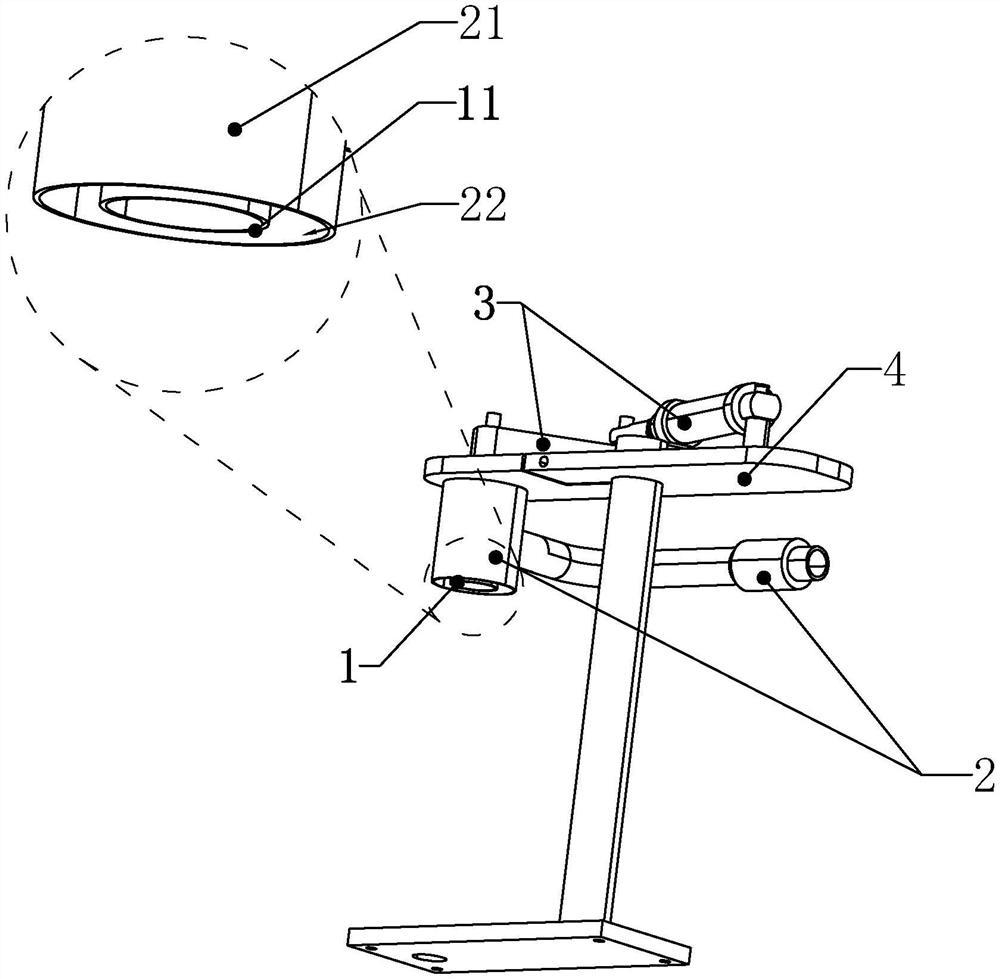
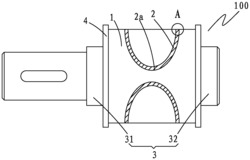
参考图1至图4,本申请实施例的一种微型五轴数控机床,包括:
底座7、支撑架1,用于对整个数控机床进行支撑;
Z轴装置4,设置在所述底座7上,用于控制C轴旋转工作台5在Z轴方向上的移动;
Y轴装置3,设置在所述支撑架1顶部,用于控制B轴装置6在Y轴方向上的移动;
X轴装置2,固定在所述Y轴装置3上,用于控制刀具在X轴方向上的移动;
B轴装置6;固定在所述X轴装置2上,用于控制电主轴63的摆动;及
C轴旋转工作台5,用于对工件进行固定;
所述X轴方向、Y轴方向和Z轴方向两两相互垂直。
其中,所述B轴装置6采用45°倾斜角布置,可直接将电主轴从垂直方向变为水平方向,即实现铣削加工中心的“立-卧转换”功能,提高机床的通用性;而且还可以使B轴装置6摆动时不发生干涉且对空间的利用达到最大化。
本实施例的微型五轴数控机床对现有的五轴数控机床进行简化,使机床整体结构简化,体积小,成本低,功能全,惯性小,制造装配方便,具备五轴加工能力,解决大多数在校学生需要多人操作一台五轴数控机床的难题,也提高了五轴数控技术的教学质量,同时还解决小型企业首件试切和小型零件的单件或小批量生产问题。
在其中一个实施例中,所述B轴装置6包括电主轴63、电主轴支座64、摆动减速器62、摆动电机61、锥齿轮621和同步传动带622,所述电主轴63通过电主轴支座64与锥齿轮621的从传动轮连接,所述摆动减速器62的一端与锥齿轮621的主传动轮连接,所述摆动减速器62的另一端与摆动电机61通过所述同步传动带622连接;
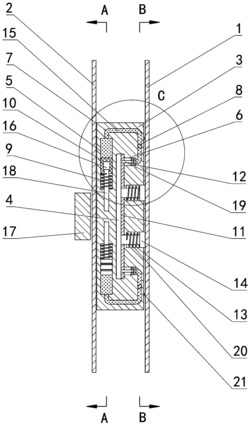
在其中一个实施例中,所述Z轴装置4包括:Z轴滑块45、Z轴滚珠丝杠44、Z轴滑轨46和Z轴驱动装置40;所述Z轴滑块45通过所述Z轴滚珠丝杠44和Z轴滑轨46设置在所述底座7与所述支撑架1顶板之间,所述Z轴滑轨46一端固定在所述支撑架1顶部,另一端与所述底座7固定连接;所述Z轴滚珠丝杠44一端与所述底座7螺纹连接,另一端穿过支撑架1顶部与所述Z轴驱动装置40连接;所述Z轴滑块45内设置有第一驱动电机51、第一减速器和支撑板53,所述C轴旋转工作台5设置在所述支撑板53上;所述第一驱动电机51通过联轴器与第一减速器连接,所述第一减速器的输出轴穿过所述支撑板53与所述C轴旋转工作台5连接。
其中,所述Z轴的设计行程为:0~160mm。
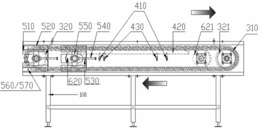
在其中一个实施例中,所述Z轴驱动装置40设置在所述支撑架1顶部,所述Z轴驱动装置40包括第二驱动电机400、第一主传动轮401、第一从传动轮403和第一同步带402,所述第一主传动轮401通过第一联轴器与所述第二驱动电机400连接,所述第一从传动轮403与所述第一主传动轮401通过所述第一同步带402连接,所述第一从传动轮403与所述Z轴滚珠丝杠44通过第一键槽连接。在其中一个实施例中,所述Y轴装置3包括Y轴滑块31、Y轴驱动装置32,Y轴滑轨37,Y轴滚珠丝杠34;所述Y轴滑轨37一端固定在所述Y轴滑块31靠近所述Y轴驱动装置32一端侧壁,另一端穿过所述支撑架1顶部并与所述Y轴滑块31远离所述Y轴驱动装置32的一端侧壁固定连接,所述Y轴滚珠丝杠34平行设置在两个Y轴滑轨37之间,一端穿过所述Y轴滑块31侧壁与所述Y轴驱动装置32连接,另一端穿过所述支撑架1顶部和与所述Y轴滑块31另一侧壁连接。
其中,Y轴的设计行程为:-170~0mm。
在其中一个实施例中,所述Y轴驱动装置32设置在所述Y轴滑块31上,所述Y轴驱动装置32包括第三驱动电机320、第二主传动轮321、第二从传动轮323和第二同步带322;所述第二主传动轮321通过第二联轴器与第三驱动电机320连接,第二从传动轮323与第二主传动轮321通过第二同步带322连接,所述第二从传动轮323与Y轴滚珠丝杠34通过第二键槽连接。
在其中一个实施例中,所述X轴装置2包括X轴驱动装置21、X轴滑轨22、X轴滑块25和X轴滚珠丝杠24;所述X轴滑块25通过所述X轴滑轨22和所述X轴滚珠丝杠24设置在所述Y轴滑块31上;所述X轴滑轨22两端分别固定设置在所述Y轴滑块31的两侧,所述X轴滚珠丝杠24平行设置在两个X轴滑轨22之间,所述X轴滚珠丝杠24一端与所述Y轴滑块31远离所述X轴驱动装置21的侧壁螺纹连接,另一端穿过所述Y轴滑块31侧壁与所述X轴驱动装置21连接。
其中,X轴的设计行程为:-40~140mm。
在其中一个实施例中,所述X轴驱动装置21设置在所述Y轴滑块31上;所述X轴驱动装置21包括第四驱动电机213、第三主传动轮214、第三从传动轮211和第三同步带212;所述第三主传动轮214通过第三联轴器与所述第四驱动电机213连接,所述第三从传动轮211与所述第三主传动轮214通过第三同步带212连接,所述第三从传动轮211与X轴滚珠丝杠24通过第三键槽连接。
在其中一个实施例中,所述C轴旋转工作台5为设置有带T型槽的圆形工作台,其半径为75mm。所述T型槽的个数根据需要进行设置,可以为4个、5个、6个等。
在其中一个实施例中,所述底座7上还设置有螺栓孔。可以将该五轴数控机床固定在需要的位置。
本申请实施例中所用的第一驱动电机、第二驱动电机、第三驱动电机和第四驱动电机均采用的是配置有高分辨率旋转光电编码器的伺服电机。
本申请实施例中所用机床控制系统选用西门子840D,机床与PC机通过单片机无缝连接。PC机中自带该机床的虚拟仿真系统,优化NC程序、提高机床加工效率。
工作原理:本申请的数控机床加工零件过程中,先将零件的毛坯模型添加进虚拟仿真系统中,再将NC加工程序载入虚拟仿真系统中,对工件进行虚拟仿真加工,检验NC程序的正确性;排查完NC程序中存在的问题,并确保加工过程无碰撞、干涉等情况后,将实际毛坯安装在机床工作台上,确保实际零件的安装状态与虚拟仿真加工系统中的保持一致,在PC控制系统中载入NC程序后,进行零件的实际加工。
本申请实例中,当机床收到指令程序时,数控装置将刀具的走刀位置转化为各个机床轴的运动信息,进而控制相应运动轴的驱动电机运动,通过带轮传动来带动丝杠的运动并最终实现各运动轴部件的运动。
具体为:当机床接收到“XYZBC轴”的运动信息后,第二驱动电机400在脉冲信号驱动下开始转动,通过第一同步带402带动Z轴滚珠丝杠44旋转,从而带动Z轴滑块45向上或向下运动;第一驱动电机51在接受到指令后进行旋转,实现C轴旋转工作台的转动;C轴旋转工作台5设置在Z轴装置4上,因此工作台自身旋转的同时还随着Z轴滑块的运动而运动。第三驱动电机320通过第二主传动轮321、第二从传动轮323和第二同步带322实现Y轴滚珠丝杠34的旋转,进而使得Y轴装置3按照丝杠前进或后退的方向进行运动;X轴滑块25在第四驱动电机213、第三主传动轮214、第三从传动轮211、第三同步带212及X轴滚珠丝杠24带动下按照程序控制要求实现X方向的运动。摆动电机61在接受到驱动信号后,通过同步传动带622、摆动减速器62及锥齿轮621的运动,实现旋转轴的旋转运动,该旋转轴与机床Z轴呈45°夹角,随着旋转轴的旋转运动,机床主轴实现从垂直到水平方向的变化,进而完成机床电主轴63在水平与垂直方向间摆动;X轴装置2设立在Y轴装置3上,B轴装置设立在X轴装置2上,使X装置以及B轴装置除了做自身运动外还可以随着Y轴装置的运动而运动,进而实现整个机床的多轴联动控制。
以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
一种微型五轴数控机床专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0