






专利摘要
本发明公开了风速感知作动器,涉及智能材料、压电技术领域,能够感知风速和方向,并在不同方向和速度的风的作用下快速反应,改变前进方向。本发明包括:竖直压电纤维传感器、柔性基体、水平压电纤维传感器、磷青铜基座、金属足、压电陶瓷片。柔性基体上表面分布黏贴水平压电纤维传感器,柔性基体上表面还设置若干凸台,凸台表面粘贴竖直压电纤维传感器。柔性基体的下表面黏贴磷青铜基座,磷青铜基座为正多半形,底面设置金属足。磷青铜基座边长内侧分别粘贴压电陶瓷片,压电陶瓷片沿边长中垂线轴对称。本发明结构紧凑,反应速度快,可应用于气象监测、机器人、武器装备等领域。
权利要求
1.风速感知作动器,其特征在于,包括:竖直压电纤维传感器(1)、柔性基体(2)、水平压电纤维传感器(3)、磷青铜基座(4)、金属足(5)、压电陶瓷片(6);
柔性基体(2)上表面分布黏贴水平压电纤维传感器(3),柔性基体(2)上表面还设置了若干个凸台,所述凸台表面沿竖直方向粘贴竖直压电纤维传感器(1);
柔性基体(2)的下表面黏贴磷青铜基座(4),磷青铜基座(4)为正三角形,底面顶点处设置金属足(5),分别为第一金属足(51)、第二金属足(52)、第三金属足(53),磷青铜基座(4)边长内侧分别粘贴压电陶瓷片(6),分别为第一压电陶瓷片(61)、第二压电陶瓷片(62)、第三压电陶瓷片(63),第一金属足(51)和第二金属足(52)之间设置的为第一压电陶瓷片(61),第一金属足(51)和第三金属足(53)之间设置的为第三压电陶瓷片(63),第二金属足(52)和第三金属足(53)之间设置的第二压电陶瓷片(62),压电陶瓷片(6)沿所述边长中垂线轴对称。
2.根据权利要求1所述的风速感知作动器,其特征在于,柔性基体(2)和磷青铜基座(4)为尺寸相同的正三角形,磷青铜基座(4)底面的顶角处安装金属足(5)。
3.根据权利要求1所述的风速感知作动器,其特征在于,竖直压电纤维传感器(1)、水平压电纤维传感器(3)采用P(VDF-TrFE)压电纤维传感器。
4.根据权利要求3所述的风速感知作动器,其特征在于,所述P(VDF-TrFE)压电纤维传感器中的压电纤维由近电场静电纺丝方法制备。
5.风速感知作动器的工作方法,适用于权利要求1-4所述的风速感知作动器,其特征在于,包括:
S1、通过线性拟合方法确定风速和竖直压电纤维传感器、水平压电纤维传感器测量值之间的数学关系,得到各个竖直压电纤维传感器、水平压电纤维传感器的特征系数;
S2、采集当前时刻各个竖直压电纤维传感器、水平压电纤维传感器的测量值,利用所述数学关系和特征系数,推导出所有压电纤维传感器测得的当前时刻风速测量值、风向测量值;
S3、取当前时刻风速测量值、风向测量值的平均值,标记为当前时刻风速、当前时刻风向;
S4、判断当前时刻风速与设定风速阈值的大小关系,若当前时刻风速大于设定风速阈值,向压电陶瓷片施加正弦电压,控制作动器做逃离风速方向的运动。
6.根据权利要求5所述的风速感知作动器的工作方法,其特征在于,在所述S4中,所述压电陶瓷片控制作动器运动的控制方法包括:
如果所述当前时刻风向和以所述金属足为顶点的等边三角形的垂直平分线延伸方向一致,则向每一片所述压电陶瓷片施加正弦电压,控制作动器向远离风向的方向发生位移;
如果所述当前时刻风向和作动器的运动方向具有一定夹角,向某一片所述压电陶瓷片施加正弦电压,控制作动器的运动方向旋转至和所述当前时刻风向相反,再向每一片所述压电陶瓷片施加正弦电压,控制作动器向远离风向的方向发生位移。
说明书
技术领域
本发明涉及智能材料、压电技术领域,尤其涉及了风速感知作动器及其工作方法。
背景技术
采用P(VDF-TrFE)压电纤维在风作用下的微小振动所产生的电信号的原理,制作出的压电纤维传感器具有体积小、精度高的优点。可应用于气象、国防设备、机器人等领域。
作动器是实施振动主动控制的关键部件,是主动控制系统的重要环节。压电作动器是一种通过外加电压对作动位移及输出力进行控制的装置,具有换能系数高,发热少,无电磁干扰的优点,可应用于航空航天、武器装备、仪器仪表、机器人等领域,目前压电作动器在以可靠性为主要关注点的航天领域被大力推广。
现有技术中,作动器一般需要预设运动轨迹,不能根据现场工况中的风速和方向进行自适应的运动。
发明内容
本发明提供了风速感知作动器及其工作方法,能够感知风速和方向,并在不同方向和速度的风的作用下快速反应,改变前进方向。
为达到上述目的,本发明采用如下技术方案:
风速感知作动器,包括:竖直压电纤维传感器、柔性基体、水平压电纤维传感器、磷青铜基座、金属足、压电陶瓷片。
柔性基体上表面分布黏贴水平压电纤维传感器,柔性基体上表面还设置了若干个凸台,凸台表面沿竖直方向粘贴竖直压电纤维传感器。
柔性基体的下表面黏贴磷青铜基座,磷青铜基座为正多边形,底面设置金属足,磷青铜基座边长内侧分别粘贴压电陶瓷片,压电陶瓷片沿边长中垂线轴对称。
进一步的,柔性基体和磷青铜基座为尺寸相同的正三角形,磷青铜基座底面的顶角处安装金属足。
进一步的,竖直压电纤维传感器、水平压电纤维传感器采用P(VDF-TrFE)压电纤维传感器。
进一步的,P(VDF-TrFE)压电纤维传感器中的压电纤维由近电场静电纺丝方法制备。
风速感知作动器的工作方法,包括:
S1、通过线性拟合方法确定风速和竖直压电纤维传感器、水平压电纤维传感器测量值之间的数学关系,得到各个竖直压电纤维传感器、水平压电纤维传感器的特征系数;
S2、采集当前时刻各个竖直压电纤维传感器、水平压电纤维传感器的测量值,利用所述数学关系和特征系数,推导出所有压电纤维传感器测得的当前时刻风速测量值、风向测量值;
S3、取当前时刻风速测量值、风向测量值的平均值,标记为当前时刻风速、当前时刻风向;
S4、判断当前时刻风速与设定风速阈值的大小关系,若当前时刻风速大于设定风速阈值,向压电陶瓷片施加正弦电压,控制作动器做逃离风速方向的运动。
进一步的,在所述S4中,所述压电陶瓷片控制作动器运动的控制方法包括:
如果所述当前时刻风向和以所述金属足为顶点的等边三角形的垂直平分线延伸方向一致,则向每一片所述压电陶瓷片施加正弦电压,控制作动器向远离风向的方向发生位移。
如果所述当前时刻风向和作动器的运动方向具有一定夹角,向某一片所述压电陶瓷片施加正弦电压,控制作动器的运动方向旋转至和所述当前时刻风向相反,再向每一片所述压电陶瓷片施加正弦电压,控制作动器向远离风向的方向发生位移。
本发明的有益效果是:
本发明采用分别设置与垂直和水平方向的压电纤维传感器,综合对风的速度和方向进行测量,根据测量结果,再通过对压电陶瓷片分别施加电压,使得金属足产生振动,改变前进方向,做出远离风向的运动,结构紧凑,反应速度快,可应用于气象监测、机器人、武器装备等领域。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
图1、图2是实施例的结构示意图;
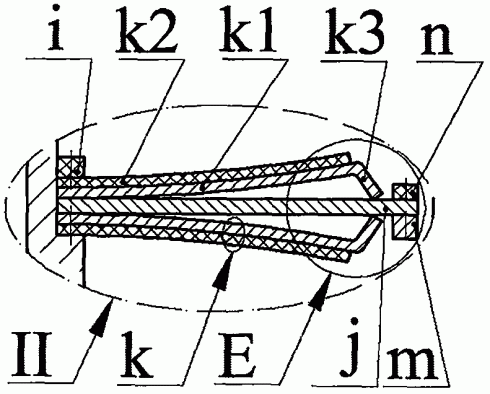
图3是柔性基体的结构示意图;
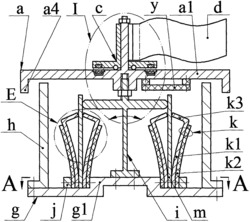
图4是磷青铜基座的结构示意图;
图5是实施例的标准三视图;
图6是竖直压电纤维传感器工作原理图;
图7是本发明的工作示意图。
其中,1-竖直压电纤维传感器、11-第一竖直压电纤维传感器、12-第二竖直压电纤维传感器、13-第三竖直压电纤维传感器、2-柔性基体、3-水平压电纤维传感器、4-磷青铜基座、5-金属足、51-第一金属足、52-第二金属足、53-第三金属足、6-压电陶瓷片、61-第一压电陶瓷片、62-第二压电陶瓷片、63-第三压电陶瓷片、7-电荷放大器、8-数据采集卡。
具体实施方式
为使本领域技术人员更好地理解本发明的技术方案,下面结合具体实施方式对本发明作进一步详细描述。
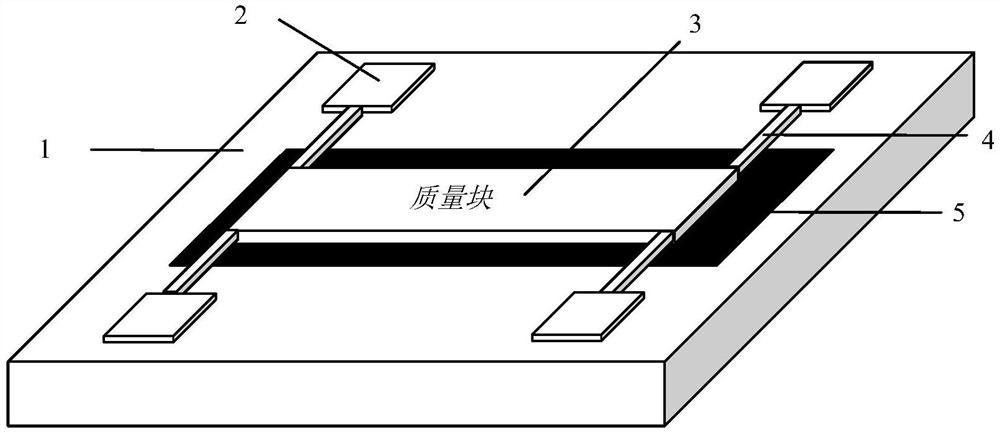
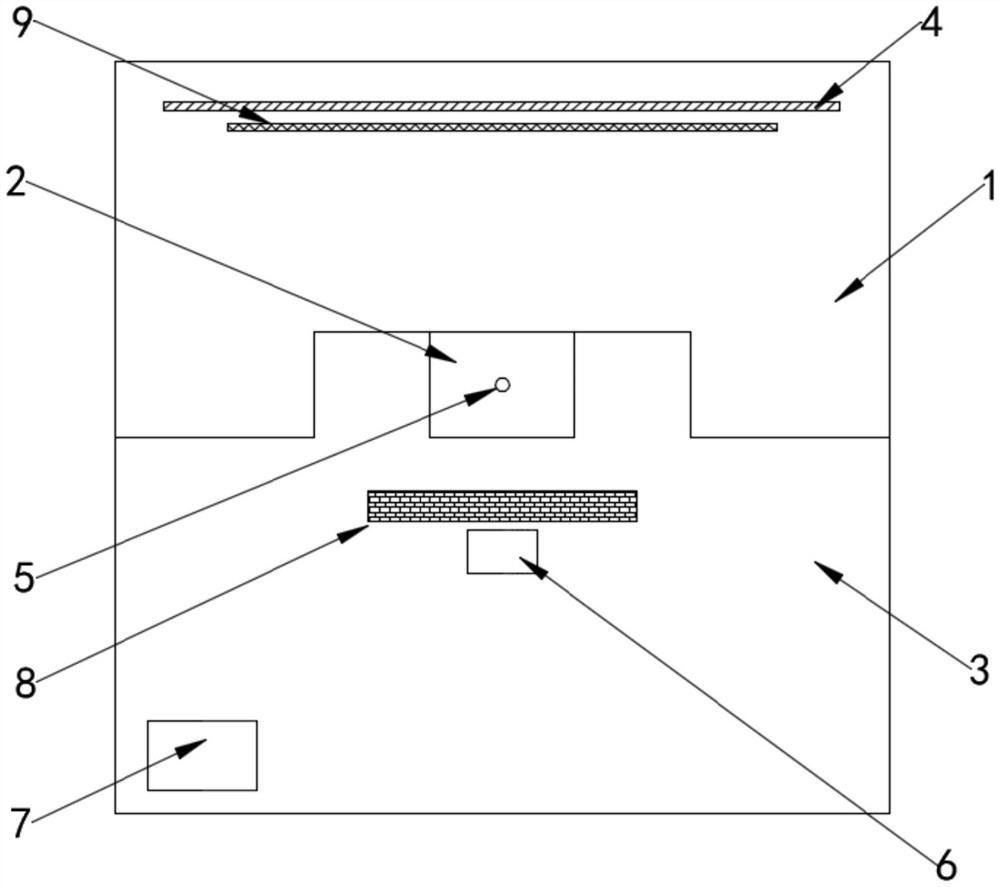
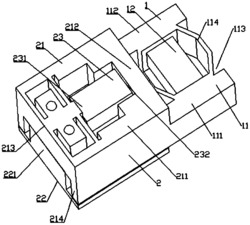
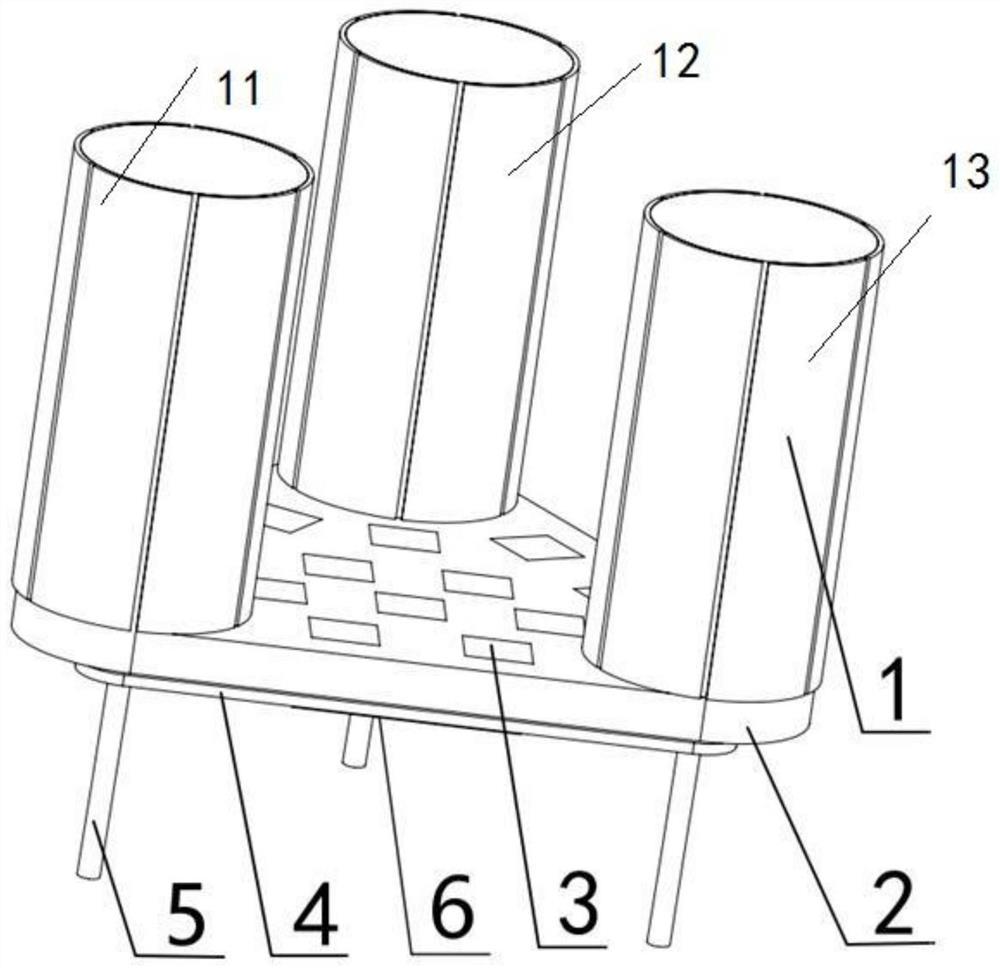
本发明实施例提供了风速感知作动器,如图1、2所示,包括:
竖直压电纤维传感器1、柔性基体2、水平压电纤维传感器3、磷青铜基座4、金属足5、压电陶瓷片6。
柔性基体2为正三角形,如图3所示,采用3D打印方法制备,得到的基体精度较高。柔性基体2分别在顶点处设置三个圆柱形凸台,凸台上粘贴竖直压电纤维传感器1,分别为第一竖直压电纤维传感器11、第二竖直压电纤维传感器12、第三竖直压电纤维传感器13。
柔性基体2的上表面还分布了若干片水平压电纤维传感器3。
其中,竖直压电纤维传感器1、水平压电纤维传感器3均采用P(VDF-TrFE)压电纤维传感器,且其中的压电纤维由近电场静电纺丝方法制备,竖直压电纤维传感器工作原理图如图6所示。
柔性基体2的底面粘贴同样为正三角形的磷青铜基座4,且磷青铜基座4的顶点设置在所述凸台轴线的延长线上。在磷青铜基座4的底面,顶点处安装金属足5,边长内侧粘贴压电陶瓷片6。第一金属足51和第一竖直压电纤维传感器11所在的凸台、第二金属足52和第二竖直压电纤维传感器12所在的凸台、第三金属足53和第三竖直压电纤维传感器13所在的凸台均同轴设置。
并且,第一金属足51和第二金属足52之间设置的为第一压电陶瓷片61,第一金属足51和第三金属足53之间设置的为第三压电陶瓷片63,第二金属足52和第三金属足53之间设置的第二压电陶瓷片62。
本实施例的工作方法为:
竖直压电纤维传感器1的测量值为Uvm、水平压电纤维传感器3的测量值为Uhn。m为竖直压电纤维传感器的标号,n为水平压电纤维传感器的标号。
通过线性拟合方法确定风速与感应电信号之间的数学关系,具体包括如下步骤:
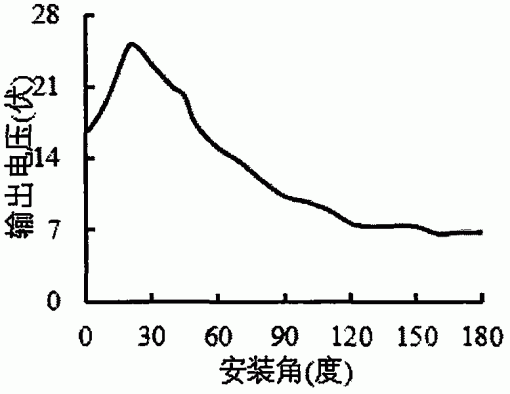
1.先设定风速大小为V,将标号为1,2,3…m的竖直压电纤维传感器依次正对风的来向,风向为α,测得此时的感应电信号分别为Uv1、Uv2......Uvn;将标号为1,2,3…n的水平压电纤维传感器依次正对风的来向,即α=90°,测得此时的电信号分别为Uh1、Uh2......Uhn。
2.采用线性拟合的方法得出电信号Uvm、Uhn与Vvm、Vhn之间的数学关系:Uvm=Kvm×V
Vvm为风速在竖直压电纤维传感器1上的垂直分量,Vvm=V×sin(α);Vhn为风速在水平压电纤维传感器3上的垂直分量,Vhn=V×cos(α)。Kvm、Khn为单个压电纤维传感器的特征系数。
竖直压电纤维传感器1包括m个压电纤维传感器,水平压电纤维传感器包括n个压电纤维传感器,在风速为V、风向为α的风作用下,对m个竖直压电纤维传感器所得出测量值Uv1、Uv2......Uvm取前三个最大值。竖直压电纤维传感器是粘贴在圆柱凸台上的,在面对风吹的时候,会有半个圆柱表面积的纤维传感器是接收不到风的,所以只分别取三个凸台上传感器信号最大的三个测量值。
对n个水平压电纤维传感器的测量值Uh1、Uh2......Uhn均保留,利用公式Uvm=Kvm×V
如果测得风速大于先前设定的,作动器所能承受的极大值时,为了避免作动器倾覆,需要控制作动器做逃离风速方向的运动。
当得出的风向来自于以金属足为顶点的等边三角形的垂直平分线上,向压电陶瓷片6施加正弦电压,作动器向远离风向的方向发生位移。
当分析得出作动器的运动方向和风向具有一定角度时,要先将作动器的运动旋转至和风向相反。例如,风向和第一金属足51之间具有γ夹角,向第二压电陶瓷片62施加正弦电压,使得作动器以第一金属足51为定点,向风合力的反方向进行转动。当作动器和风向相背时,再向3片压电陶瓷片3同时施加正弦电压,作动器向远离风向的方向发生位移。以凸台11上的竖直压电纤维传感器为例,若凸台11上分布6个压电纤维传感器,对其经行顺时针标号1-6,当作动器沿着金属足51为顶点所在垂直平分线运动时,若此时测得6个竖直压电纤维传感器测量值最小的Uvm为序号为1的传感器,则顺时针旋转30°,同理当测量值最小的Uvm为序号为6的传感器时则顺时针旋转150°。
本实施例中,压电纤维传感器首先经过电荷放大器7的放大,放大后的数值由数据采集卡8采集,数据采集卡8采用NI数据采集卡。采集后的数据在LabVIEW控制系统中进行分析处理,最终通过编写控制程序实现运动控制,信号传输的示意图如图7所示
本发明的有益效果是:
本发明采用分别设置与垂直和水平方向的压电纤维传感器,综合对风的速度和方向进行测量,根据测量结果,再通过对压电陶瓷片分别施加电压,使得金属足产生振动,改变前进方向,做出远离风向的运动,结构紧凑,反应速度快,可应用于气象监测、机器人、武器装备等领域。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
风速感知作动器及其工作方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0