









专利摘要
本发明是一种基于环形芯同轴螺旋波导光纤的粒子光操纵器件。其特征是:所述器件由一段环形芯同轴螺旋波导光纤1组成,并且光纤的纤端经过研磨形成纤端圆锥台2;该环形芯同轴螺旋波导光纤1包含包层3、环形纤芯4和一个由多个螺旋波导5组成的中央纤芯6。一方面,该器件可以通过环形芯同轴螺旋波导光纤1纤端出射强聚焦环形光场10,在纤端外的聚焦点附近实现对粒子11的稳定三维俘获,实现对粒子11的定位和定轴功能;另一方面,也可以通过控制螺旋纤芯出射的相位涡旋光束14的能量大小来实现粒子11的定轴旋转15和旋转弹射16。本发明可用于光信息传输、光学微操纵、显微成像、药物颗粒等微小粒子的光操纵以及光纤集成器件应用等领域。
权利要求
1.基于环形芯同轴螺旋波导光纤的粒子光操纵器件,其特征是:所述器件主要由一段环形芯同轴螺旋波导光纤(1)组成,并且光纤的纤端经过研磨形成纤端圆锥台(2);该环形芯同轴螺旋波导光纤(1)包含包层(3)、环形纤芯(4)和一个由多个螺旋波导(5)组成的中央纤芯(6);一方面,当向环形芯同轴螺旋波导光纤(1)输入环形光(7)后,在环形纤芯(4)中会激发产生环形芯导模(8),再经过纤端圆锥台时发生全内反射,反射光波(9)在纤端包层内衍射传输到达纤端端面,然后在纤端发生折射形成强聚焦环形光场(10),从而在纤端外的聚焦点附近实现对微小粒子(11)的稳定三维俘获,实现对微小粒子(11)的定位和定轴功能;另一方面,当向中央纤芯(6)输入高斯光场(12)后,由于中央纤芯(6)的周期性螺旋结构,使得在中央纤芯(6)中传输的低阶线偏振模式可转化为高阶的相位涡旋模式(13),在光纤端出射相位涡旋光束(14),然后作用于被强聚焦环形光场(10)捕获的微小粒子(11);由于相位涡旋光束(14)携带有轨道角动量,所以可以提供给微小粒子(11)旋转力矩;而相位涡旋光束(14)的光辐射压力还可提供微小粒子(11)向前运动的推力,但是当相位涡旋光束能量较小时,该推力无法抵消掉微小粒子(11)受到的光俘获力,因而被稳定地捕获在强聚焦环形光场(10)的焦点附近,在聚焦环形光场提供的俘获力和相位涡旋光束提供的扭转力和推进力的共同作用下实现微小粒子(11)定轴旋转(15);当相位涡旋光束(14)能量较大时,微小粒子(11)在相位涡旋光束(14)提供的扭转力和辐射压力的共同作用下,直接摆脱强聚焦环形光场(10)光俘获力的束缚,实现微小粒子(11)的旋转弹射(16)。
2.根据权利要求1所述的基于环形芯同轴螺旋波导光纤的粒子光操纵器件,其环形芯同轴螺旋波导光纤及其纤端圆锥台的制备方法如下:(1)先采用MCVD制棒方法制备内壁含有环形芯层的中空环形芯光纤预制棒构件;(2)根据需要在石英棒对应位置加工多个微孔,并插入多波导芯棒形成含有多个波导的中央纤芯预制棒插件,最后把整个插件嵌入中空环形芯光纤预制棒构件中组合成新的光纤预制棒;(3)将制备好的光纤预制棒放置于拉丝塔上进行热融旋转拉丝,在拉丝旋转过程中,含有多波导的中央纤芯形成螺旋结构;(4)用光纤夹具固定住制备好的环形芯同轴螺旋波导光纤,然后把纤端放置于研磨盘上,光纤夹具与光纤研磨盘都能绕各自的中轴自转,通过控制环形芯同轴螺旋波导光纤与研磨盘盘面法线的夹角来制备具有不同张开角的纤端圆锥台。
3.根据权利要求1所述的基于环形芯同轴螺旋波导光纤的粒子光操纵器件,其所述的光束在纤端圆锥台处发生全内反射的方式有两种:一种是通过纤端圆锥台侧面与媒质的交界面的折射率差异产生全内反射;一种是通过在纤端圆锥台侧面镀膜形成的镜面而产生全内反射。
4.根据权利要求1-3任意一项所述的基于环形芯同轴螺旋波导光纤的粒子光操纵器件,其特征是:所述的环形芯同轴螺旋波导光纤纤端圆锥台的侧面也是弧面。
5.根据权利要求1所述的基于环形芯同轴螺旋波导光纤的粒子光操纵器件,其特征是:所述的环形芯同轴螺旋波导光纤的中央纤芯的螺距为:相等或者不等。
6.根据权利要求1所述的基于环形芯同轴螺旋波导光纤的粒子光操纵器件,其特征是:所述的一个由多个螺旋波导组成的中央纤芯由两个或两个以上的螺旋波导构成。
7.根据权利要求1所述的基于环形芯同轴螺旋波导光纤的粒子光操纵器件,其特征是:所述的微小粒子为:介质微粒、生物细胞或其他微小粒子。
说明书
(一)技术领域
本发明涉及的是一种基于环形芯同轴螺旋波导光纤的粒子光操纵器件,可用于光信息传输、光学微操纵、显微成像、药物颗粒等微小粒子的光操纵以及光纤集成器件应用等领域。
(二)背景技术
电磁场的动量有两部分组成:线动量和角动量。而角动量又分为两种:自旋角动量和轨道角动量。1992年Allen发现光场带有轨道角动量,这才引起了涡旋光束的进一步被研究。由于涡旋光束携带有轨道角动量,其大小为 因此当涡旋光束照射到微粒上时,光子所带的轨道角动量直接传递给微米、亚微米量级的微粒,引起微粒的旋转。除了可引起微粒的旋转外,涡旋光束可实现对微粒的俘获和平移。当l=+1(或l=-1)时,光波中的每个光子含有 能量的左旋(或右旋)轨道角动量,光波的波前呈现左旋(或右旋)单螺旋结构。同样轨道角动量,光波的波前则为左旋(或右旋)双螺旋结构,当l=+2(或l=-2)时,光波中的每个光子含有 能量的左旋(或右旋)。
涡旋光产生方法有很多。在自由空间中,可通过螺旋相位板(SPP)、螺旋相位板(SPP)等方式生成涡旋光束。专利(201310428704.4)介绍了一种产生稳定涡旋光束的装置及方法,该装置采用液芯光纤来生成涡旋光束,但操作难度大,制作要求比较高。专利(201310030066.0、201310030067.5和201310029915.0)公开了多种纤芯折射率呈手性分布的特种光纤用于生成相位涡旋光束。专利(US6839486)公开了一种对偏芯、椭圆芯、矩形芯等扭转而成的手性结构光纤,该光纤不但可以实现光栅功能,同样可以生产涡旋光束。
1970年,Aahkin等首先提出能利用光压(optical pressure)操纵微小粒子的概念。一直到1986年,Ashkin才发现只需要一束高度聚焦的激光,就可以形成稳定的能量阱能将微粒稳定俘获,形成了光镊。当会聚激光束照射到微粒上时,激光发生折射和反射,也包括一部分吸收。被微粒反射和吸收的光作用就是光辐射压力,或者称散射力,其方向与光传播方向一致,它趋向于使小球沿光束传播方向运动。与此同时,光束经过微粒会发生多次折射,有些会聚光线折射后传播方向更趋向于光轴(即光束传播方向),从而增大了轴向动量,因而给与微粒与光传播方向相反的作用力,表现为拉力,这就是轴向梯度力的本质,由于此拉力的作用,导致粒子在轴向可以稳定在激光焦点附近。而微粒在横向的偏离,由于光场的非均匀性,也会受到指向激光焦点的回复力,即横向梯度力。在梯度力和散射力的共同作用下,微粒被稳定束缚在激光焦点附近。
为了实现微小粒子的扭转与捕获,实现涡旋光束光纤光马达技术,可利用两根位置稍稍错位的单模光纤来实现微粒旋转(Lab on a Chip,2014,14(6):1186-1190),该结构利用外加压力来使两个单模光纤错位,这样就造成两个单模光纤出射的高斯光场作用于微粒时,光辐射压力由于错位而形成微粒旋转的力矩,最终实现微粒旋转。这种方式对系统的稳定性要求极其严格。而Kreysing等人采用了另一种类似的结构(Nature communications,2014,5),他采用单模光纤出射的高斯光场和少模光纤出射的LP11模式光场把微粒夹持在中央。由于少模光纤的输入光的相位分布由空间光调制器控制,使得其输出LP11模式光场强度分布可绕光轴旋转,从而导致被这两束光捕获在中间的微粒也能随之旋转。虽然该系统可以对微粒实现稳定的三维捕获和旋转,但是该系统需要采用空间光调制器等昂贵而大型的空间光学设备,并且其灵活性不高,很难实现探针式应用。因此,研究者又利用少模光纤锥形纤端探针实现了酵母细胞的三维捕获和方向控制(Jounal of Lightwave Technol,2014,32(6):1098-103),但该系统并不能对细胞实现稳定的旋转功能。此外,Chen等人也利用光纤LP21模式实现了对生物细胞的旋转操作(Journal of Optics,2014,16(12):125302),但该系统却不能对细胞形成稳定的三维捕获。
为了拓展特种光纤器件的功能和实现更加灵活地粒子操纵能力,本发明公开了一种可实现粒子定轴旋转和旋转弹射的基于环形芯同轴螺旋波导光纤的粒子光操纵器件及其制备方法,可用于微流芯片、细胞或药物颗粒等微小粒子的光操纵以及光纤集成器件应用等领域。与在先技术相比,本发明不但实现了粒子的稳定三维俘获,实现了粒子的定位和定轴功能,而且通过控制螺旋纤芯出射的相位涡旋光束的能量大小来实现粒子的定轴旋转和旋转弹射。此外,在涡旋光产生过程中,本发明并不是依靠在单一螺旋波导中产生涡旋光束,而是通过多个螺旋波导阵列来产生涡旋光束,因此可以依靠各种特殊设计的螺旋波导阵列的空间排布来产生具有多种不同光束结构或螺旋阶次的涡旋光束,从而满足采用多种螺旋纤芯结构的环形芯同轴螺旋波导光纤粒子光操纵的不同功能。
(三)发明内容
本发明的目的在于提供一种可实现粒子定轴旋转和旋转弹射功能的基于环形芯同轴螺旋波导光纤的粒子光操纵器件。
本发明的目的是这样实现的:
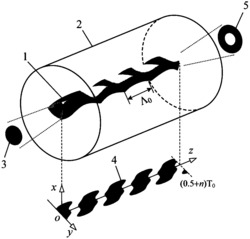
如图1所示,所述器件主要由一段环形芯同轴螺旋波导光纤1组成,并且光纤的纤端经过研磨形成纤端圆锥台2;该环形芯同轴螺旋波导光纤1包含包层3、环形纤芯4和一个由多个螺旋波导5组成的中央纤芯6。一方面,当向环形芯同轴螺旋波导光纤1输入环形光7后,在环形纤芯4中会激发产生形环芯导模8,再经过纤端圆锥台2(包层与外界媒质的分界面处)时发生全内反射,反射光波9在纤端包层内衍射传输到达纤端端面,然后在纤端发生折射形成强聚焦环形光场10,从而在纤端外的聚焦点附近实现对微小粒子11的稳定三维俘获,实现对微小粒子11的定位和定轴功能;另一方面,当向中央纤芯6输入高斯光场12后,由于中央纤芯6的周期性螺旋结构,使得在中央纤芯6中传输的低阶线偏振模式可转化为高阶的相位涡旋模式13,在光纤端出射相位涡旋光束14,然后作用于被强聚焦环形光场10捕获的微小粒子11;由于相位涡旋光束14携带有轨道角动量,所以可以提供给微小粒子11旋转力矩;而相位涡旋光束14的光辐射压力还可提供粒子11向前运动的推力,但是当相位涡旋光束能量较小时,该推力无法抵消掉粒子11受到的光俘获力,因而被稳定地捕获在强聚焦环形光场10的焦点附近,在聚焦环形光场提供的俘获力和相位涡旋光束提供的扭转力和推进力的共同作用下实现粒子定轴旋转15;当相位涡旋光束14能量较大时,微小粒子11在相位涡旋光束14提供的扭转力和辐射压力的共同作用下,直接摆脱强聚焦环形光场10光俘获力的束缚,实现粒子的旋转弹射16。
下面将详细阐述环形芯同轴螺旋波导光纤实现涡旋光束生成的原理。环形芯同轴螺旋波导光纤的中央纤芯由多个螺旋波导组成,由于中央纤芯的这种周期性空间螺旋结构,可以把中央纤芯看成长周期光纤光栅,因此可以用光纤光栅理论来解释涡旋光束的生成。根据光栅条件:
β1-βj=±mku, (1)
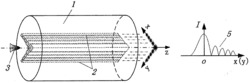
这里β1和βj分别为中央纤芯基模和高阶涡旋模式的传输常数,m表示空间结构螺旋的个数,中央纤芯的螺旋多波导结构的螺旋节距为Λu=2π/ku。由此可知,只要在合适的螺旋节距和光纤长度下,中央纤芯传输的基模就会转化为高阶模型模式。以一阶涡旋模式为例,在满足公式(1)的条件下,光波在中央纤芯传输时,纤芯的基模就会和一阶涡旋模式发生耦合,当在一定的光纤长度下绝大部分基模能量转化为一阶涡旋模式能量时,我们就实现了在此光纤长度下的涡旋光束的生成。从图2可以看出,纤芯的基模光场强度具有类环形分布(图2(a),同时也具有一致的相位分布(图2(b));然而,纤芯的一阶涡旋模式虽然同样具有类环形光强分布(图2(c)),但其相位却具有涡旋分布(图2(d))。这种一阶涡旋相位分布(拓扑荷数为1)使得该光束携带有 能量的左旋或右旋轨道角动量,用于实现对微小粒子的旋转或螺旋弹射。
以此类推,在其他具有不同螺旋波导排列的环形芯同轴螺旋波导光纤中,通过合适的螺旋节距就可实现中央纤芯的基模转化为高阶涡旋模式(m≥1),最终生成了拓扑荷数为m的左旋或右旋涡旋光束。
(四)附图说明
图1是基于环形芯同轴螺旋波导光纤的粒子光操纵器件的工作原理示意图。
图2分别为环形芯同轴螺旋波导光纤中央纤芯的传输模式的强度和相位分布图:(a)基模强度;(b)基模相位;(c)高阶涡旋模式强度;(d)高阶涡旋模式相位。
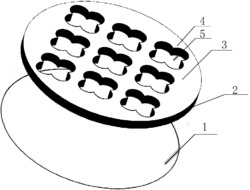
图3是环形芯同轴螺旋波导光纤预制棒组合图。
图4是环形芯同轴螺旋波导光纤扭转拉制示意图。
图5是环形芯同轴螺旋波导光纤纤端研磨示意图。
图6具有不同螺旋中央纤芯结构的环形芯同轴螺旋波导光纤:(a)双螺旋波导;(b)三螺旋波导;(c)五螺旋波导;(d)六螺旋波导。
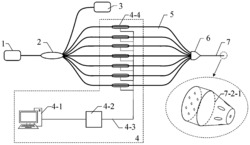
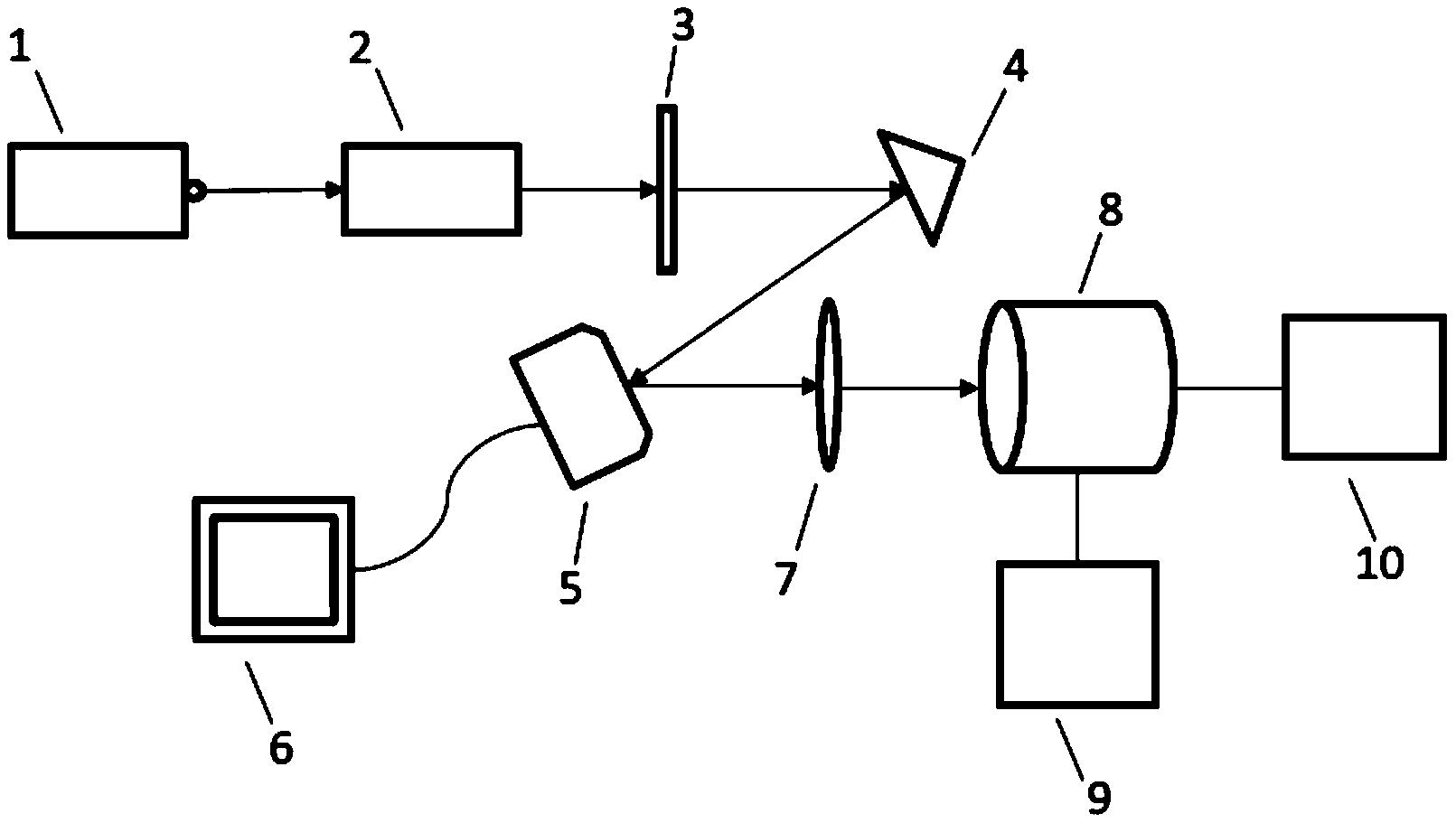
图7是基于环形芯同轴螺旋波导光纤的光耦合及粒子光操纵器件的装置示意图。
(五)具体实施方式
下面结合附图举例对本发明做更详细地描述:
结合图1,本发明实施方式由一段环形芯同轴螺旋波导光纤1组成,并且光纤的纤端经过研磨形成纤端圆锥台2;该环形芯同轴螺旋波导光纤1包含包层3、环形纤芯4和一个由多个螺旋波导5组成的中央纤芯6。一方面,当向环形芯同轴螺旋波导光纤1输入环形光7后,在环形纤芯4中会激发产生形环芯导模8,再经过纤端圆锥台2(包层与外界媒质的分界面处)时发生全内反射,反射光波9在纤端包层内衍射传输到达纤端端面,然后在纤端发生折射形成强聚焦环形光场10,从而在纤端外的聚焦点附近实现对微小粒子11的稳定三维俘获,实现对微小粒子11的定位和定轴功能;另一方面,当向中央纤芯6输入高斯光场12后,由于中央纤芯6的周期性螺旋结构,使得在中央纤芯6中传输的低阶线偏振模式可转化为高阶的相位涡旋模式13,在光纤端出射相位涡旋光束14,然后作用于被强聚焦环形光场10捕获的微小粒子11;由于相位涡旋光束14携带有轨道角动量,所以可以提供给微小粒子11旋转力矩;而相位涡旋光束14的光辐射压力还可提供粒子11向前运动的推力,但是当相位涡旋光束能量较小时,该推力无法抵消掉粒子11受到的光俘获力,因而被稳定地捕获在强聚焦环形光场10的焦点附近,在聚焦环形光场提供的俘获力和相位涡旋光束提供的扭转力和推进力的共同作用下实现粒子定轴旋转15;当相位涡旋光束14能量较大时,微小粒子11在相位涡旋光束14提供的扭转力和辐射压力的共同作用下,直接摆脱强聚焦环形光场10光俘获力的束缚,实现粒子的旋转弹射16。
基于环形芯同轴螺旋波导光纤的粒子光操纵器件制备过程可分为以下三个步骤:
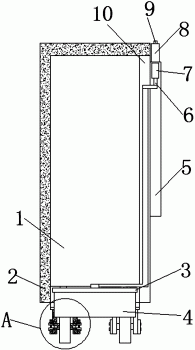
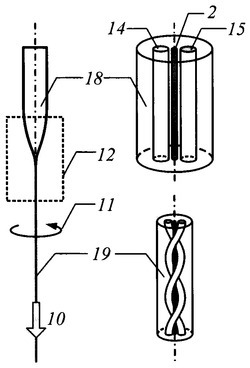
步骤1、环形芯同轴螺旋波导光纤预制棒制备(见图3)。首先,采用MCVD制棒方法制备内壁含有环形芯层17的中空环形芯光纤预制棒构件18;然后,根据需要在内包层石英棒19对应位置加工多个微孔20,并插入多波导芯棒21形成含有多个波导的中央纤芯预制棒插件22;最后,把整个插件嵌入中空环形芯光纤预制棒构件中组合成新的光纤预制棒23。
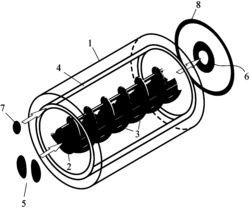
步骤2、拉制光纤(见图4)。将制备好的光纤预制棒23放置在光纤拉丝塔上,并固定在旋转电机24上,光纤预制棒23经过加热炉25加热熔融并在垂直牵引力26和旋转电机24提供的扭转力27的共同作用下旋转拉丝。中央纤芯最终拉制成螺旋状,形成环形芯同轴螺旋波导光纤1。
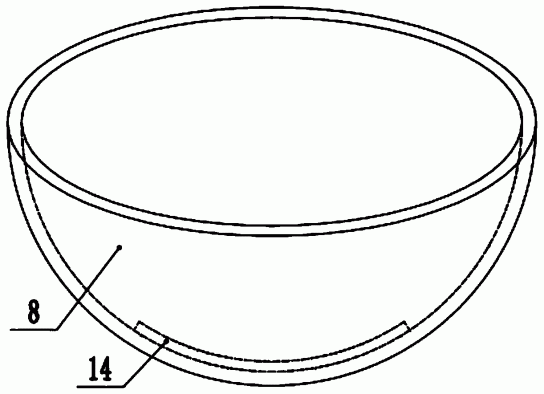
步骤3、纤端研磨(见图5)。用光纤夹具28固定好环形芯同轴螺旋波导光纤1,然后把纤端放置于研磨盘29上,光纤夹具28与光纤研磨盘29各连接有一个直流电机驱动使其绕各自的中轴自转;保持环形芯同轴螺旋波导光纤1与研磨盘29的盘面法线呈固定夹角θ,通过光纤夹具28和研磨盘29的自转即可研磨出张开角为θ的纤端圆锥台2。
类似地,可以通过控制光纤预制棒微孔20的数量、大小和位置来制备出具有多种不同中央纤芯结构的环形芯同轴螺旋波导光纤(见图6)及相应的粒子光操纵器件。
下面结合具体的实施例来进一步阐述本发明。
步骤1、光纤制备:按照实施方式的光纤制备方法制作环形芯同轴螺旋波导光纤1。
步骤2、光纤纤端研磨:按照实施方式的光纤纤端研磨方法制作圆锥台纤端结构(见图5)。
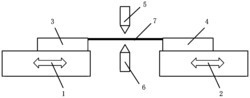
步骤3、粒子光俘获(见图7):在环形芯同轴螺旋波导光1中,环形纤芯4的光源输入由侧抛光纤耦合器30来实现。该耦合器由包层经过抛磨的单模光纤31和环形芯同轴螺旋波导光纤1组成,由于两个侧抛面32紧密靠在一起,使单模光纤纤芯33与环形芯同轴螺旋波导光纤1的环形纤芯4距离足够近,当向单模光纤31输入激光34时,单模光纤31传输的光波就可以直接耦合到环形芯同轴螺旋波导光纤1的环形纤芯4中,并形成环形纤芯导模8。最后,环形纤芯导模8经过纤端圆锥台2的强聚焦环形光场10,从而在纤端外的聚焦点附近实现对微通道内的悬浮于溶液中的粒子11的稳定三维俘获,实现粒子11的定位和定轴功能。
步骤4、粒子的旋转或弹射(见图7):在环形芯同轴螺旋波导光纤1中,中央纤芯6的光输入通过在环形芯同轴螺旋波导光纤1的一端直接焊接单模光纤31来实现。输入激光34后,在单模光纤31中会激发产生光纤基模LP01,输入到环形芯同轴螺旋波导光纤1的中央纤芯6后,激发产生相位涡旋模式13,从而实现在纤端出射相位涡旋光束14,当该光束能量较小时,在相位涡旋光束14提供的扭转力和推进力的共同作用下实现粒子定轴旋转15,实现光马达功能;反之,如果相位涡旋光束14能量只够大,粒子11会脱离俘获力的作用而在相位涡旋光束14提供的扭转力和推进力的共同作用下迅速远离纤端,实现粒子11的旋转弹射16。
基于环形芯同轴螺旋波导光纤的粒子光操纵器件专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0