







专利摘要
一种四极电枢,包括:电枢体,电枢体为截面形状是中心对称的八边形的块体;与电枢体相连的电枢悬臂,电枢悬臂连接于电枢体的四个两两相对的侧面上,侧面的长度与电枢悬臂的宽度相同,电枢悬臂为挠性臂,电枢悬臂从电枢体沿与电枢移动方向相平行的方向向后延伸,电枢悬臂的尾部比电枢悬臂的头部更远离电枢体的轴线;电枢悬臂与电磁发射器中的轨道过盈配合。本发明通过设置从电枢体上向外延伸的电枢悬臂,挠性的电枢悬臂与轨道过盈配合,在电枢安装时可以获得足够的电枢与轨道间的接触面积和接触压力,解决了在电磁发射过程中,电枢与轨道间的接触面因磨损、烧蚀等现象而导致的电枢与轨道接触分离的问题,保证了电磁发射的稳定性。
权利要求
1.一种四极电枢,其特征在于,包括:
电枢体,所述电枢体为截面形状是中心对称的八边形的块体;
与所述电枢体相连的电枢悬臂,所述电枢悬臂连接于所述电枢体的四个两两相对的侧面上,所述侧面的长度与所述电枢悬臂的宽度相同,所述电枢悬臂为挠性臂,所述电枢悬臂从所述电枢体沿与电枢移动方向相平行的方向向后延伸,所述电枢悬臂的尾部比电枢悬臂的头部更远离电枢体的轴线;
所述电枢悬臂与电磁发射器中的轨道过盈配合;
所述电枢悬臂与电磁发射器的轨道相接触的接触面为曲面,采用仿真拟合的方法确定电枢悬臂接触面的轮廓曲线方程,具体步骤如下:
采用有限元分析软件建立电枢模型,电枢悬臂的过盈量为0mm;
在电枢悬臂上施加反向载荷,反向载荷的大小为电枢悬臂与轨道之间接触压强的预设值,反向载荷的方向与电枢悬臂和轨道接触时轨道作用在电枢悬臂上的力的方向相反;
根据所施加的反向载荷对电枢悬臂上各个点的挠度值进行仿真计算;
根据仿真计算得到的挠度值数据进行拟合,拟合得到的表达式即为电枢悬臂接触面的轮廓曲线方程,根据该轮廓曲线方程确定电枢悬臂接触面的结构。
2.根据权利要求1所述的四极电枢,其特征在于:所述电枢悬臂的头部与所述电枢体的前端面平齐。
3.根据权利要求1所述的四极电枢,其特征在于:所述电枢体为将一个正方形块体的四个直角部切除后得到的块体,电枢悬臂连接于将正方形块体的四个直角部切除后剩下的未切侧面上,被切除的直角部的尺寸相同,且直角部的截面形状为等腰直角三角形。
4.根据权利要求1所述的四极电枢,其特征在于:所述电枢悬臂的宽度与电磁发射器轨道的宽度相同。
5.根据权利要求1或2或3或4所述的四极电枢,其特征在于:所述电枢悬臂的长度与宽度的比例为3:1~4:1。
6.根据权利要求1或2或3或4所述的四极电枢,其特征在于:所述电枢悬臂头部的厚度与电枢体的厚度相同,电枢悬臂头部厚度与尾部厚度的比例为3:1~2:1。
7.根据权利要求1或2或3或4所述的四极电枢,其特征在于:所述电枢悬臂与电磁发射器的轨道相接触的接触面为平面。
8.根据权利要求1所述的四极电枢,其特征在于:采用非线性最小二乘法进行数据轮廓曲线方程的拟合,拟合函数模型为多项式函数:ω′(x)=a
说明书
技术领域
本发明属于地空导弹电磁弹射技术领域,尤其涉及一种用于四极电磁发射器的四极电枢。
背景技术
电磁发射是一项突破传统导弹、火炮发射原理的新概念军事技术,目前是世界各军事强国大力发展的重点技术。将电磁发射技术应用于地空导弹武器系统,可为现役和在研防空导弹弹射器的统型、通用发射平台的研制以及防空反导装备弹族化建设奠定理论基础,以最大程度地发挥各型导弹的作战效能。
目前的电磁发射器主要包括轨道和电枢,电枢与轨道相接触并可沿轨道滑动,当轨道通电后,电枢会在安培力的作用下加速运动。电枢在电磁发射器中的主要作用是连通轨道与轨道之间的电路,承受发射器的电磁推力。电枢作为电磁发射器的核心部件,其结构对电磁发射性能有重要的影响。在电磁发射的过程中,电枢与轨道相接触的表面由于受高压、高温、高速的物理作用,会发生烧蚀、磨损等现象,从而导致电枢与轨道相分离,影响电磁发射的可靠性。
发明内容
本发明的目的是提供一种可以避免电磁发射过程中电枢与轨道发生分离的四极电枢,从而提高电磁发射的可靠性。
为了实现上述目的,本发明采取如下的技术解决方案:
一种四极电枢,包括:电枢体,所述电枢体为截面形状是中心对称的八边形的块体;与所述电枢体相连的电枢悬臂,所述电枢悬臂连接于所述电枢体的四个两两相对的侧面上,所述侧面的长度与所述电枢悬臂的宽度相同,所述电枢悬臂为挠性臂,所述电枢悬臂从所述电枢体沿与电枢移动方向相平行的方向向后延伸,所述电枢悬臂的尾部比电枢悬臂的头部更远离电枢体的轴线;所述电枢悬臂与电磁发射器中的轨道过盈配合。
进一步的,所述电枢悬臂的头部与所述电枢体的前端面平齐。
进一步的,所述电枢体为将一个正方形块体的四个直角部切除后得到的块体,电枢悬臂连接于将正方形块体的四个直角部切除后剩下的未切侧面上,被切除的直角部的尺寸相同,且直角部的截面形状为等腰直角三角形。
进一步的,所述电枢悬臂的宽度与电磁发射器轨道的宽度相同。
进一步的,所述电枢悬臂的长度与宽度的比例为3:1~4:1。
进一步的,所述电枢悬臂头部的厚度与电枢体的厚度相同,电枢悬臂头部厚度与尾部厚度的比例为3:1~2:1
进一步的,所述电枢悬臂与电磁发射器的轨道相接触的接触面为平面。
进一步的,所述电枢悬臂与电磁发射器的轨道相接触的接触面为曲面。
进一步的,采用仿真拟合的方法确定电枢悬臂接触面的轮廓曲线方程,具体步骤如下:
采用有限元分析软件建立电枢模型,电枢悬臂的过盈量为0mm;
在电枢悬臂上施加反向载荷,反向载荷的大小为电枢悬臂与轨道之间接触压强的预设值,反向载荷的方向与电枢悬臂和轨道接触时轨道作用在电枢悬臂上的力的方向相反;
根据所施加的反向载荷对电枢悬臂上各个点的挠度值进行仿真计算;
根据仿真计算得到的挠度值数据进行拟合,拟合得到的表达式即为电枢悬臂接触面的轮廓曲线方程,根据该轮廓曲线方程确定电枢悬臂接触面的结构。
进一步的,采用非线性最小二乘法进行数据轮廓曲线方程的拟合,拟合函数模型为多项式函数:ω′(x)=a0+a1x+a2x2+a3x3+…,拟合函数模型中x表示电枢悬臂上各个点的x坐标,ω′(x)表示电枢悬臂上各个点的拟合挠度;拟合的目标函数为:res=min∑(ω′(xdata)-ydata)2,式中的xdata为电枢悬臂上各点的x坐标值,ydata为仿真计算得到的电枢悬臂上各点的挠度值,ω’(·)表示拟合函数模型。
由以上技术方案可知,本发明通过设置从电枢体上向外延伸的电枢悬臂,由电枢悬臂与轨道相接触,挠性的电枢悬臂与轨道过盈配合,在电枢安装时可以获得足够的电枢与轨道间的接触面积和接触压力,解决了在电磁发射过程中,电枢与轨道间的接触面因磨损、烧蚀等现象而导致的电枢与轨道接触分离的问题,保证了电磁发射的稳定性;而且与现有的四极电枢结构相比,现有四极电枢结构是电枢的外侧面与轨道直接接触,在电枢安装时为了实现电枢的侧面都能与四个轨道同时接触,对电枢的加工精度要求非常高,本发明采用电枢悬臂与轨道过盈配合的结构,可以使四个电枢悬臂与轨道保持同时接触,不仅降低了电枢的加工精度要求,而且还可以保证电枢(悬臂)与轨道的初始接触面积和足够的接触压力。本发明的电枢结构可应用于串联增强型四极轨道电磁发射器或非增强型四极轨道电磁发射器。
在优选的技术方案中,本发明将电枢悬臂与轨道的接触面设为弧面,并通过反向加载法来确定接触面的轮廓曲线,对电枢悬臂接触面的轮廓曲线进行优化改进,优化后的电枢悬臂在进行初始接触时,在电枢悬臂尾部位置没有出现接触分离的现象,而且电枢悬臂的接触面积和接触效率显著提高,接触面压强分布更加均匀,接触压力有所减小,改善了电枢-轨道初始接触面的压力分布情况,降低了对轨道造成的影响,为施加脉冲电流提供了良好的接触状态。
附图说明
图1为本发明实施例1的结构示意图;
图2为本发明实施例1的正视图;
图3为本发明实施例1的后视图;
图4为本发明实施例1的侧视图;
图5为四极轨道电磁发射器的剖视图;
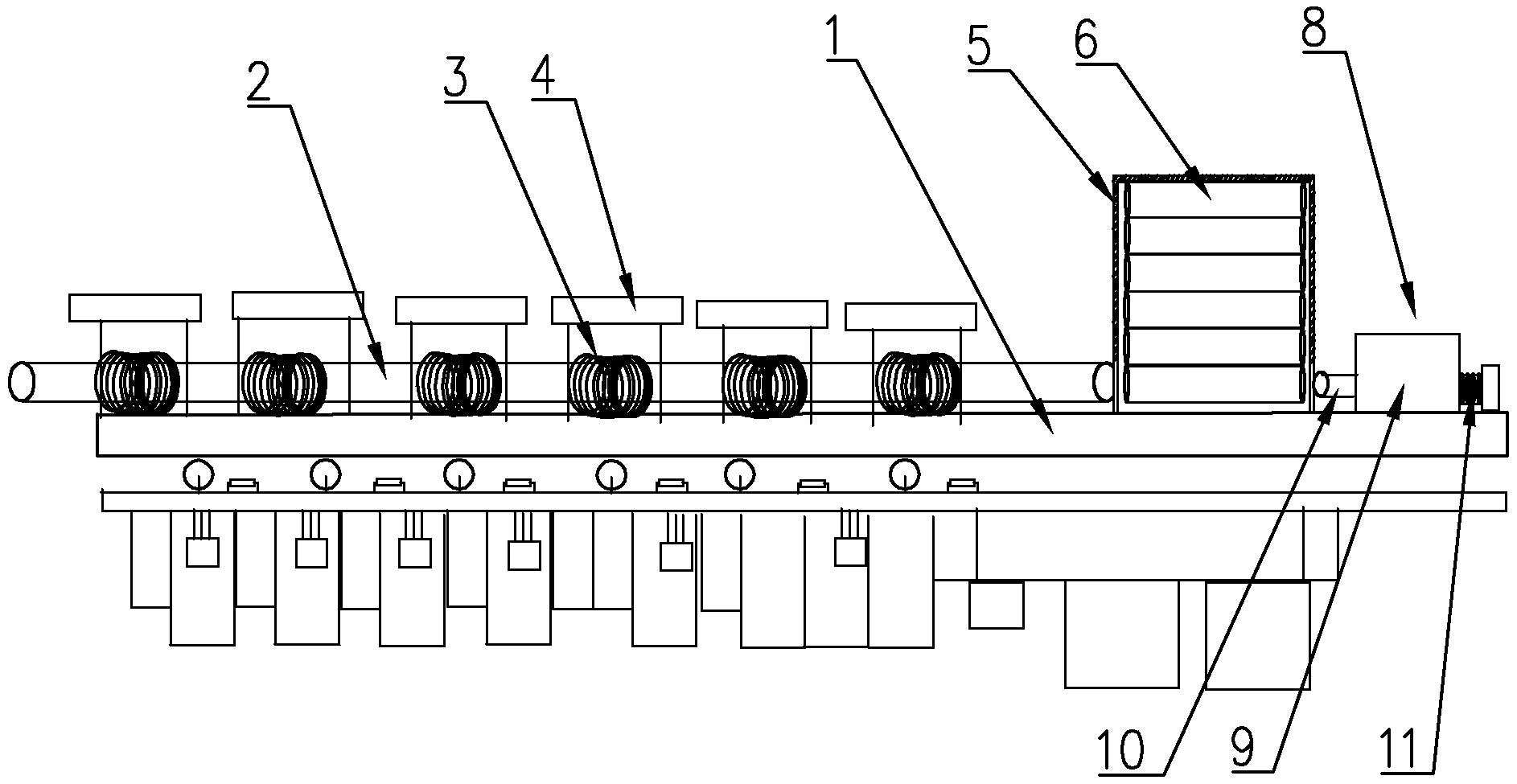
图6为本发明实施例1与四极轨道电磁发射器的轨道的装配示意图;
图7为正方形电枢体的电流分布矢量图;
图8为本发明实施例2电枢悬臂与电枢体的局部结构示意图;
图9为图8的侧视图;
图10为图8的俯视图;
图11为本发明实施例2电枢悬臂的尾部朝前时的示意图;
图12a为实施例2电枢悬臂接触面的轮廓曲线;
图12b为仿真时在电枢体的电枢悬臂上施加反向载荷的示意图;
图13a为对实施例1的电枢悬臂与轨道进行接触仿真时初始接触压强分布云图;
图13b为对实施例2的电枢悬臂与轨道进行接触仿真时初始接触压强分布云图;
图14a为实施例1和实施例2的电枢悬臂的长度-接触面积关系曲线图;
图14b为实施例1和实施例2的电枢悬臂的长度-接触效率关系曲线图;
图14c为实施例1和实施例2的电枢悬臂的长度-最大接触压强关系曲线图;
图14d为实施例1和实施例2的电枢悬臂的长度-接触反力关系曲线图。
以下结合附图对本发明的具体实施方式作进一步详细地说明。
具体实施方式
下面结合附图对本发明进行详细描述,在详述本发明实施例时,为便于说明,表示器件结构的附图会不依一般比例做局部放大,而且所述示意图只是示例,其在此不应限制本发明保护的范围。需要说明的是,附图采用简化的形式且均使用非精准的比例,仅用以方便、清晰地辅助说明本发明实施例的目的。
实施例1
如图1、图2、图3和图4所示,本实施例的电枢包括电枢体1,以及与电枢体1相连的电枢悬臂2。电枢体1为八边形的块体,在电枢体1的中心设置有一通孔(未标号)。电枢悬臂2为挠性臂,4个电枢悬臂2分别连接于电枢体1的两两相对的四个侧面上,电枢悬臂2从电枢体1的前端面沿与电枢移动方向相平行的方向向后延伸。为了便于描述,将电枢悬臂2的与电枢体1相连的端部定义为头部,则电枢悬臂2的自由端为尾部,电枢悬臂2的头部与电枢体1的前端面平齐。电枢悬臂2具有与电磁发射器中的轨道滑动接触的接触面s,本实施例的接触面s为平面,电枢悬臂2的竖截面形状为梯形(图4)。电枢悬臂2头部的厚度大于电枢悬臂2尾部的厚度,电枢悬臂2的尾部比电枢悬臂2的头部更远离电枢体1的轴线L。
如图5所示,四极轨道发射器内部具有一容纳电枢的空腔a以及用于设置主轨道的第一轨道槽b和用于设置副轨道的第二轨道槽c,空腔a的截面形状为正方形,电枢可容纳于其中。第一轨道槽b对称设置于空腔a的外侧,第二轨道槽c位于第一轨道槽b的外侧。如图6所示,#2、#4、#5、#7为发射器的主轨道,#1、#3、#6、#8为发射器的副轨道。电流的路径为#1→#3→#2→电枢→#4和#7;#6→#8→#5→电枢→#4和#7,电枢运动的方向为+x方向。
当电枢和主轨道装配在一起时,电枢位于4根主轨道(#1、#3、#6、#8)之间,电枢的4根电枢悬臂分别与4根主轨道相接触,且4根电枢悬臂与主轨道之间为过盈配合。由于电枢悬臂2与主轨道之间为过盈配合,装配好后,主轨道会向电枢悬臂施加压力,使电枢悬臂与主轨道紧密接触,并可以避免电枢悬臂与轨道的接触面在使用过程中发生磨损、烧蚀后电枢与轨道发生分离的情况,保证了发射的可靠性。
图7为一个正方形的电枢体的电流分布矢量图。通过对正方形的电枢体进行电磁仿真,发明人发现,在截面形状为正方形的电枢体中,电流密度主要分布在图7中的虚线区域内,脉冲电流在电枢体的四个直角处的密度很小,由于电流密度的大小会直接影响电磁力的大小,因此在电枢体的四个直角处的电磁力也很小。因此,本发明将电枢体的形状设为将正方形的四个直角部(图2中的虚线部分)切除后的形状,直角部的截面形状为等腰直角三角形,被切除的四个直角部的尺寸均相同,将正方形块体的四个直角部切除后,得到的电枢体的截面形状为中心对称的八边形,得到的八边形具有两对相对布置的长边和两对相对布置的短边,长边与短边相邻,然后将电枢悬臂连接于电枢体每个侧面在切掉直角部后剩下的未切面上,该未切面的长度与电枢臂的宽度相同。由于电枢体被切除掉的部位是电流密度很小的直角部,切除直角部后可以在不降低电磁推力的情况下减小电磁发射质量。
实施例2
图8、图9、图10及图11为本发明实施例2电枢悬臂的结构示意图。本实施例与实施例1不同的地方是:电枢悬臂2与轨道相接触的接触面s为曲面,即接触面s的轮廓为曲线形,该曲线的前端点与电枢体1的轴线之间的距离和该曲线的末端点与电枢体1的轴线之间的距离的差值为电枢悬臂的过盈量tr(实施例1中接触面为倾斜的平面,则接触面的轮廓为直线形,过盈量tr为该直线的前端点与电枢体1的轴线之间的距离和该直线的末端点与电枢体1的轴线之间的距离的差值),本实施例的过盈量tr为2.4mm。
图9和图10中,lr为电枢悬臂2延伸超出电枢体1的部分的长度,将该部分的长度定义为电枢悬臂的长度,wr为电枢悬臂的宽度,dr为电枢悬臂尾部的厚度,hr为电枢悬臂头部的厚度。电枢悬臂的宽度wr与轨道的宽度相同,电枢悬臂的长度lr与电枢悬臂受到的电磁压力有关,即与施加脉冲电流后电枢悬臂与轨道之间的接触压力有关。电枢悬臂越长时,电枢悬臂受到的电磁压力越大,即电枢悬臂与轨道之间的接触压力越大,对发射装置的轨道支撑强度要求越高;电枢悬臂的长度减小时,电枢与轨道的接触面积减小,可能会导致电枢-轨道接触面的压力过度集中,容易加剧轨道磨损。发明人综合考虑电枢与轨道的接触反力与接触面积,设置电枢悬臂的长度与宽度的比例为3:1~4:1,本实施例的电枢悬臂的长度与宽度的比例为3.5:1;电枢悬臂头部厚度hr与电枢体的厚度相同,电枢悬臂头部厚度与尾部厚度的比例为3:1~2:1,本实施例的电枢悬臂头部厚度与尾部厚度的比例为2.5:1。自然状态下,电枢悬臂2不受外力作用,呈轻微向外翘曲的状态;当与轨道相接触时,在轨道的压力作用下,电枢悬臂2的接触面s趋向于变平。
如图12a所示,曲线AB’为电枢悬臂接触面的轮廓曲线,该轮廓曲线亦为电枢悬臂的挠度曲线。本实施例通过反向加载法来确定电枢悬臂接触面的轮廓曲线方程yAB’(x)。反向加载法就是将预设的电枢悬臂与轨道之间的接触压强作为外加载荷反向加载在电枢悬臂上,根据悬臂梁弯曲变形的理论,对施加了反向载荷q(x)的电枢悬臂弯曲后的挠度和转角进行求解,得到的挠度曲线即为的电枢悬臂接触面的轮廓曲线。电枢与轨道初始接触后的接触反力是已知的,反向加载法中将该接触反力设定为电枢悬臂与轨道之间的接触压强的预设值(预加载荷),电枢悬臂的过盈量tr根据预加载荷确定,当施加在电枢悬臂上的预加载荷确定时,电枢悬臂在预加载荷的作用下发生变形,即得到电枢悬臂的过盈量tr。
图12a中的曲线AB’为自然状态下电枢悬臂接触面的轮廓曲线,曲线AB为理想状态下,电枢悬臂与轨道接触产生形变后的轮廓曲线yAB(x),yAB’(x)=yAB(x)+ω(x)。理想情况下,电枢安装完成时yAB(x)=0,则电枢悬臂接触面s的初始轮廓曲线yAB’(x)=ω(x),ω(x)为电枢悬臂的挠曲线方程: 式中的M(x)为电枢悬臂的弯矩,E为电枢悬臂材料的弹性模量,C、D为常数,x为轮廓曲线上的点的x坐标。电枢悬臂的弯矩 式中的x1为所施加的反向载荷q(x)的左侧边界点,x2为反向载荷q(x)的右侧边界点,q(t)为t点位置的载荷值。由电枢悬臂接触面的挠曲线方程ω(x)的表达式可以看出,根据该方程进行求解的过程比较困难,难以据此确定电枢悬臂接触面的轮廓曲线方程,而且以上求解过程只针对电枢悬臂而未包括整个电枢体,在考虑电枢体的情况下,惯性矩很难求解,对应的ω(x)也更难求解,而且电枢体结构的形变也会对ω(x)产生一定的影响,导致对挠度曲线方程求解存在一定的误差。
为了减少误差,发明人在获取电枢悬臂轮廓曲线时采用有限元仿真分析反向施加载荷,仿真得到挠度数据后,通过拟合的方法确定电枢悬臂接触面的轮廓曲线方程,具体方法如下:
采用有限元分析软件,如ANSYS等,建立电枢模型,电枢悬臂的过盈量为0mm;
对电枢悬臂进行网格划分,在电枢体的电枢悬臂上施加反向载荷q(x)(图12b),反向载荷q(x)的大小为电枢悬臂与轨道之间接触压强的预设值,反向载荷q(x)的方向与电枢悬臂和轨道接触时轨道作用在电枢悬臂上的力的方向相反;
根据所施加的反向载荷q(x)对电枢悬臂上各个点的挠度值进行仿真计算;即通过仿真得到电枢悬臂在预加载荷的作用下各个点的挠度;
根据仿真计算得到的挠度值数据进行拟合,拟合得到的解析式即为电枢悬臂接触面的轮廓曲线方程,根据该轮廓曲线方程确定电枢悬臂接触面的结构。
考虑到数据间的非线性,可采用非线性最小二乘法进行数据轮廓曲线方程的拟合,拟合函数模型为多项式函数:ω′(x)=a0+a1x+a2x2+a3x3+…,拟合函数模型中x表示电枢悬臂上各个点的x坐标,ω′(x)表示电枢悬臂上各个点的拟合挠度(图12中各个节点的y坐标);拟合的目标函数为:res=min∑(ω′(xdata)-ydata)2,式中的xdata为电枢悬臂上各点的x坐标值,ydata为仿真计算得到的电枢悬臂上各点的挠度值,ω’(·)表示拟合函数模型。
为了验证本发明电枢的效果,发明人采用有限元仿真的方法对电枢(悬臂)-轨道的接触情况进行仿真,通过分析电枢(悬臂)-轨道接触面的压强分布情况对电枢(悬臂)-轨道的接触情况进行研究。由于本发明四极电枢是中心对称的结构,因此仿真时只对四极电枢的一个电枢悬臂模型做了仿真。仿真参数如表1所示,参数表中的参数分别为:la--主轨道载流长度,l--副轨道载流长度,h--轨道高度,w--轨道截面的宽度,d--主轨道与副轨道间的距离,b--发射器的口径,a--电枢体的厚度,lr--电枢悬臂的长度,wr--电枢悬臂的宽度,dr--电枢悬臂尾部的厚度,hr--电枢悬臂头部的厚度,tr--电枢悬臂的过盈量,R--电枢体中心通孔半径。
表1仿真参数表
表2为在电枢悬臂上施加反向载荷后,对电枢悬臂上各个点的挠度值进行仿真计算的结果。
表2电枢悬臂不同位置的挠度计算结果表
采用非线性最小二乘法,利用多项式函数ω′(x)=a0+a1x+a2x2+a3x3+…对表2中的数据进行拟合,拟合多项式分别采用2阶、3阶、4阶,目标函数值分别是res2=2.73×10-3,res3=2.26×10-4,res4=4.79×10-3,则采用3阶多项式的拟合,拟合得到的解析式为:ω′(x)=0.2038+8.124×10-3x+3.634×10-5x2-6.141×10-8x3,利用该解析式得到的电枢悬臂各点的拟合挠度值,并根据拟合扰度值构建一个电枢悬臂模型,进行电枢(悬臂)-轨道间的接触情况进行仿真。
仿真结果如图13a和图13b所示,图13a是接触面是平面的电枢悬臂与轨道初始接触的压强分布云图,图13b为按照以上方法构建的接触面是曲面的电枢悬臂与轨道初始接触的压强分布云图,电枢臂的过盈量都是2.4mm,其他参数如表1所示。从图中可以看出:
(1)和接触面为平面的电枢悬臂相比,接触面为曲面的电枢悬臂与轨道初始接触的接触面积明显增大,电枢(悬臂)-轨道接触面积(接触效率)增大了50%左右。
(2)电枢(悬臂)-轨道的接触区域的位置发生变化,接触面轮廓为曲线的电枢悬臂与轨道的接触区域在电枢悬臂的尾部位置,接触参数ls=0mm,这是电枢接触效率增大的原因之一。
(3)在接触压强分布均匀性上,可以看出接触面轮廓为曲线的电枢悬臂与轨道接触压强分布更加均匀,而且没有压强集中的现象;而且还可以看出,接触面轮廓为曲线的电枢悬臂与轨道接触的最大压强明显小于接触面轮廓为直线的电枢悬臂与轨道接触的最大压强。在电枢体上设置与轨道过盈配合的电枢悬臂,不仅消除了接触分离的现象,还增大了电枢悬臂的接触效率,降低了最大接触压强,达到了优化电枢结构的目的。
为分析具有电枢悬臂的电枢与轨道的初始接触特性,发明人还对不同长度的电枢悬臂进行了初始接触仿真。其中,电枢悬臂的结构参数分别为:电枢悬臂的宽度wr=100mm,电枢悬臂尾部的厚度dr=20mm,电枢悬臂头部的厚度hr=50mm。为保证两种类型的电枢悬臂的过盈量相同,仿真时进行位移监测。仿真时在电枢悬臂尾部上的点的挠度达到3mm时停止反向加载,拟合出电枢悬臂接触面的绕曲线方程,根据绕曲线方程建立电枢悬臂的接触面模型,然后进行初始接触仿真。
图14a、图14b、图14c和图14d分别为两种电枢悬臂与不同长度对应的各初始接触参数的曲线图。从图14a和图14b可以看出,与接触面轮廓为直线的电枢悬臂相比,接触面轮廓为曲线的电枢悬臂(曲线电枢)与轨道的接触面积(CA)明显增大,且当电枢悬臂的长度增大时,初始接触面积增大得越多;当电枢悬臂的长度为250mm时,接触面轮廓为曲线的电枢悬臂的初始接触面积增大了1倍以上,接触面积达到了19900mm2。电枢(悬臂)-轨道初始接触面积的增大使得电枢(悬臂)的接触效率也随之增大,接触效率随着电枢悬臂长度的增加而增大,当lr=250mm时电枢接触效率得到最大为79.7%。
从图14c可以看出,与接触面轮廓为直线的电枢悬臂相比,接触面轮廓为曲线的电枢悬臂(曲线电枢)电枢-轨道的初始接触的最大接触压强更小;但两种电枢悬臂与轨道的初始接触的最大接触压强都随着电枢悬臂长度的增大而增大,只是增大的幅度非常小。从图14d可以看出,当电枢悬臂的长度较小时,接触面轮廓为曲线的电枢悬臂上的接触反力大幅度小于接触面轮廓为直线的电枢悬臂的接触反力,随着电枢臂长度的增大,这种差距越来越小;当lr=250mm时,两种电枢悬臂的接触反力非常接近,这是由于曲线轮廓的接触面积增大导致接触反力的增大。
以上所述,仅是本发明的较佳实施例而已,并非对本发明做任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
一种四极电枢专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0