

IPC分类号 : E21C25/66,E21C25/68,E21D20/00,E21B15/00,E21D19/06,E21D17/00






专利摘要
本实用新型公开一种综掘工作面单轨式锚支护协作机,包括悬挂支撑系统、动力系统、超前支护系统、辅助运输系统、锚固机器人系统。所述悬挂支撑系统通过锚杆固定在采煤巷道的顶端,为系统提供支撑;所述动力系统安装在所述悬挂支撑系统中系统主梁末端;所述超前支护系统安装在所述悬挂支撑系统中系统主梁前端;所述辅助运输系统安装在所述超前支护系统后侧的所述悬挂支撑系统中系统主梁上;所述锚固机器人系统安装在所述动力系统与所述辅助运输系统之间的所述悬挂支撑系统中系统主梁上。进一步的,本实用新型具有良好的转弯和变坡性能,设备的运输效率高。另外,所述锚固机器人工作平台具有缓冲功能,锚固平稳,作业效率高。
权利要求
1.一种综掘工作面单轨式锚支护协作机,其特征是:包含有悬挂支撑系统、动力系统、超前支护系统、辅助运输系统、锚固机器人系统;所述悬挂支撑系统通过锚杆固定在采煤巷道的顶端,为整套设备提供支撑;所述动力系统安装在所述悬挂支撑系统中系统主梁的末端;所述超前支护系统安装在所述悬挂支撑系统中系统主梁的前端;所述辅助运输系统安装在所述超前支护系统后侧的所述悬挂支撑系统中系统主梁上;所述锚固机器人系统安装在所述动力系统与所述辅助运输系统之间的所述悬挂支撑系统中系统主梁上。
2.根据权利要求1所述的一种综掘工作面单轨式锚支护协作机,其特征是:所述悬挂支撑系统包括系统主梁、顶梁、支撑件、轨道、长方销;所述轨道的上端焊接有用于安装的结构件,下端两侧焊接有齿条;所述系统主梁通过承重小车安装在所述轨道上;所述顶梁开有四个孔,通过锚杆将其固定在采煤巷道的顶端;所述支撑件上端通过所述长方销与所述顶梁连接,下端通过所述长方销与所述轨道连接。
3.根据权利要求1所述的一种综掘工作面单轨式锚支护协作机,其特征是:所述动力系统包括承重小车、电机、电机底座、齿轮传动系统;所述电机通过螺栓安装于所述电机底座上;所述电机底座通过螺栓安装于所述承重小车下底面;所述承重小车安装于轨道表面上,且可在轨道表面上滑动;所述齿轮传动系统包括从动直齿轮A、从动蜗轮A、蜗杆A、大锥齿轮A、小锥齿轮A、差速器、主动锥齿轮A、从动直齿轮B、从动蜗轮B、蜗杆B、大锥齿轮B、小锥齿轮B、锥齿轮B;为了便于设备的行走控制,所述电机为变频一体机。
4.根据权利要求1所述的一种综掘工作面单轨式锚支护协作机,其特征是:所述超前支护系统包括超前支护主梁、支护网支架、支护网、支护网液压伸缩系统;所述超前支护主梁一端通过销与所述系统主梁连接,另一端通过销与所述支护网支架连接;所述支护网液压伸缩系统一端安装于所述超前支护主梁上,另一端安装于所述支护网支架上;所述支护网系在所述支护网支架上;所述支护网液压伸缩系统可根据被支护设备状态以及支护的条件,调整所述支护网的大小,从而实现高效支护。
5.根据权利要求1所述的一种综掘工作面单轨式锚支护协作机,其特征是:所述辅助运输系统包括辅助运输系统支撑组件A、辅助运输系统支撑组件B、支撑横梁、支撑立柱A、支撑立柱B、链轮链条运输装置、驱动装置、搬运机械手;所述辅助运输系统支撑组件A、所述辅助运输系统支撑组件B均包括上悬挂梁、液压缸、下悬挂梁;所述上悬挂梁通过销与所述系统主梁连接。
6.根据权利要求5所述的一种综掘工作面单轨式锚支护协作机,其特征是:所述链轮链条运输装置包括链轮、链条、活动挡块、活动挡板、工字型挡杆;所述链轮通过啮合带动所述链条运动;所述驱动装置包括锥齿轮AA、锥齿轮BB、伺服电机AA、电机座;所述搬运机械手包括机械爪A、机械爪B、前端执行杆、关节A、关节B、关节C、伺服电机A、伺服电机B、伺服电机C;所述机械爪A、机械爪B分别焊接在所述前端执行杆末端的左右两侧。
7.根据权利要求1所述的一种综掘工作面单轨式锚支护协作机,其特征是:所述锚固机器人系统包括锚固机器人液压缸组、锚固机器人连接组件、锚杆存放装置、锚固机器人工作平台、锚固机器人;所述锚固机器人连接组件包括折叠臂A、锚杆架电机、折叠臂B、锚固机器人连接组件液压缸组;所述折叠臂A一端通过销与所述系统主梁连接,另一端通过销与所述折叠臂B连接。
8.根据权利要求7所述的一种综掘工作面单轨式锚支护协作机,其特征是:所述锚固机器人工作平台包括中间电机定子、左侧电机定子、撑地液压缸组、连接块、右侧电机定子、电机动子、折叠臂连接液压缸、折叠液压缸A、折叠液压缸B;所述撑地液压缸组分别安装于所述左侧电机定子下底面和所述右侧电机定子下底面;所述锚固机器人包括锚杆钻机导轨、推进电机、转动台、锚固大臂、电机A、电机B、电机C、底座箱、转台、机械臂底座、连杆A、连杆B、锚杆钻机驱动链条、锚杆钻机;所述锚杆钻机通过两侧的通孔安装于所述锚杆钻机导轨的滑动杆上;所述推进电机通过所述锚杆钻机驱动链条带动所述锚杆钻机在所述锚杆钻机导轨中移动。
说明书
技术领域
本实用新型涉及综掘工作面机电装备领域,具体涉及一种锚护和支护功能于一体的机电装备,属于锚支护一体机范围。
背景技术
近年来,我国煤炭开采技术与装备的研发取得了重大突破,采煤作业在要求少人化或无人化的同时,对开采的速度也提出了更高的要求。为了解决“采掘失调”这一煤炭开采过程中的难题,掘进机的研发投入了大量的人力与物力,取得了较大的进步。目前,制约综采生产能力进一步提升的主要因素为锚支护作业速度缓慢,工作效率较低。
由于巷道掘进、锚固、支护工作时序较为接近,且三者之间的协同与配合直接决定了巷道掘进的速度,现已有部分产品将掘、锚、支机械装备集成为一体。公告号201721694586.1、201711089051.6、201711288542.3、201910109402.8等为代表的专利,所公布的一体机实质是将锚固机构与临时支护机构简单组合在掘进机上。虽然此类型一体机具有多工艺作业的功能,但各工艺不能同时工作,没有从根本上解决掘、锚、支协同作业的难题。
本课题组提出一种具有护锚协同作业功能的一体化装备的申请专利,采用单轨吊的行进方式,并将锚固设备、支护设备与掘进机分离,总体上可以实现掘、锚、支的高效协同作业,但设备的整体尺寸以及运输过程中的稳定性仍存在以下不足:
1)设备体积大,使用范围受限制。
该专利中锚固装置、支护装置与掘进机分离,整体设备尺寸较传统的掘锚支一体机大大减小,适用于一般矿井的巷道,但其辅助搬运机构的结构较为复杂以及笨重,不利于设备的运输,应用范围也会受到一定的限制。
2)设备的转弯机动性能较差,不利于运输。
该专利采用单轨吊进行设备的运输,动力系统结构简单,但运输的状态受巷道顶板工况的影响较大。尤其是当巷道有弯度、坡度时,对单轨吊上动力系统的性能要求非常高,但其动力系统仅为电机通过减速器驱动动力小车,整套设备在轨道上运行过程中的转弯性能以及防打滑性能较差。
3)设备的锚固平台不稳定,不利于锚固作业。
该专利中的锚固作业是通过安装在锚固机器人工作平台上的锚杆机器人来实现,锚固机器人工作平台通过销安装于锚固机器人系统主梁的末端。锚杆钻机在钻孔过程中会产生较大的冲击力,并直接作用于工作平台,但该平台无缓冲功能,进而,锚固机器人工作平台不能为锚杆钻机提供稳定的工作环境,不利于锚固作业。
针对以上问题,有必要对现有设备提出改进方案,进一步提高“锚支护”工作的性能。
发明内容
本实用新型的目的是为了克服现有技术的不足,提供了一种新的具有锚护和支护作业功能的结构,减小装备体积,提高装备的机动性能,并实现采煤巷道高效锚护作业,最终形成综掘工作面的锚支护协作机成套技术及装备。本实用新型所要解决的技术问题采用以下技术方案来实现:
一种综掘工作面单轨式锚支护协作机,包含有悬挂支撑系统、动力系统、超前支护系统、辅助运输系统、锚固机器人系统;所述悬挂支撑系统通过锚杆固定在采煤巷道的顶端,为整套设备提供支撑;所述动力系统安装在所述悬挂支撑系统中系统主梁的末端;所述超前支护系统安装在所述悬挂支撑系统中系统主梁的前端;所述辅助运输系统安装在所述超前支护系统后侧的所述悬挂支撑系统中系统主梁上;所述锚固机器人系统安装在所述动力系统与所述辅助运输系统之间的所述悬挂支撑系统中系统主梁上。
所述悬挂支撑系统包括系统主梁、顶梁、支撑件、轨道、长方销;所述轨道的上端焊接有用于安装的结构件,下端两侧焊接有齿条;所述系统主梁通过承重小车安装在所述轨道上;所述顶梁开有四个孔,通过锚杆将其固定在采煤巷道的顶端;所述支撑件上端通过所述长方销与所述顶梁连接,下端通过所述长方销与所述轨道连接。
所述动力系统包括承重小车、电机、电机底座、齿轮传动系统;所述电机通过螺栓安装于所述电机底座上;所述电机底座通过螺栓安装于所述承重小车下底面;所述承重小车安装于所述轨道表面上,且可在所述轨道表面上滑动;所述齿轮传动系统包括从动直齿轮A、从动蜗轮A、蜗杆A、大锥齿轮A、小锥齿轮A、差速器、主动锥齿轮A、从动直齿轮B、从动蜗轮B、蜗杆B、大锥齿轮B、小锥齿轮B、锥齿轮B;为了便于设备的行走控制,所述电机为变频一体机。
所述超前支护系统包括超前支护主梁、支护网支架、支护网、支护网液压伸缩系统;所述超前支护主梁一端通过销与所述系统主梁连接,另一端通过销与所述支护网支架连接;所述支护网液压伸缩系统一端安装于所述超前支护主梁上,另一端安装于所述支护网支架上;所述支护网系在所述支护网支架上;所述支护网液压伸缩系统可根据被支护设备状态以及支护的条件,调整所述支护网的大小,从而实现高效支护。
所述辅助运输系统包括辅助运输系统支撑组件A、辅助运输系统支撑组件B、支撑横梁、支撑立柱A、支撑立柱B、链轮链条运输装置、驱动装置、搬运机械手;所述辅助运输系统支撑组件A、所述辅助运输系统支撑组件B均包括上悬挂梁、液压缸、下悬挂梁;所述上悬挂梁通过销与所述系统主梁连接;所述链轮链条运输装置包括链轮、链条、活动挡块、活动挡板、工字型挡杆;所述链轮通过啮合带动所述链条运动;所述驱动装置包括锥齿轮AA、锥齿轮BB、伺服电机AA、电机座;所述搬运机械手包括机械爪A、机械爪B、前端执行杆、关节A、关节B、关节C、伺服电机A、伺服电机B、伺服电机C;所述机械爪A、机械爪B分别焊接在所述前端执行杆末端的左右两侧。
所述锚固机器人系统包括锚固机器人液压缸组、锚固机器人连接组件、锚杆存放装置、锚固机器人工作平台、锚固机器人;所述锚固机器人连接组件包括折叠臂A、锚杆架电机、折叠臂B、锚固机器人连接组件液压缸组;所述折叠臂A一端通过销与所述系统主梁连接,另一端通过销与所述折叠臂B连接;所述锚固机器人工作平台包括中间电机定子、左侧电机定子、撑地液压缸组、连接块、右侧电机定子、电机动子、折叠臂连接液压缸、折叠液压缸A、折叠液压缸B;所述撑地液压缸组分别安装于所述左侧电机定子下底面和所述右侧电机定子下底面;所述锚固机器人包括锚杆钻机导轨、推进电机、转动台、锚固大臂、电机A、电机B、电机C、底座箱、转台、机械臂底座、连杆A、连杆B、锚杆钻机驱动链条、锚杆钻机;所述锚杆钻机通过两侧的通孔安装于所述锚杆钻机导轨的滑动杆上;所述推进电机通过所述锚杆钻机驱动链条带动所述锚杆钻机在所述锚杆钻机导轨中移动。
包括现有的掘锚支一体机和本文所提到的专利(一种具有护锚协同作业功能的一体化装备),与现有技术相比,本实用新型的有益效果是:
1)本实用新型中辅助运输系统结构紧凑,体积小。
本实用新型中,辅助运输系统充分利用了设备中的超前支护与锚固机器人系统之间的空间,采用链轮链条运输方式,不仅减小了辅助运输装置的尺寸,而且增大了搬运物料的种类与数量,整套装备的体积更小。本实用新型尤其适合在“两淮流域”的狭小巷道中使用。
2)本实用新型中传动系统采用齿轮齿条和差速器结构,设备机动性能好。
本实用新型中,将齿条焊接在轨道下端两侧,电动机驱动与齿条啮合的减速器运转,使设备具有良好的变坡性能。同时,减速器中安装有差速器,装备在转弯过程中内外侧行进速度不同,从而实现较小弧度的转弯。因此,本实用新型的机动性能好,可在较为恶劣的巷道环境中平稳行进。
3)本实用新型中锚固机器人工作平台具有缓冲功能,锚固过程平稳。
本实用新型中,锚固机器人工作平台上端的锚固机器人与平台之间通过电磁驱动,运动与控制精度更高,有利于锚杆钻机的精确定位打孔;平台下端与液压系统连接。锚杆钻机作业时,液压系统底端撑地,从而将钻孔过程中产生的冲击力吸收并传递给地面,使平台更加稳定,为锚杆钻机提供了良好的工作条件。
附图说明
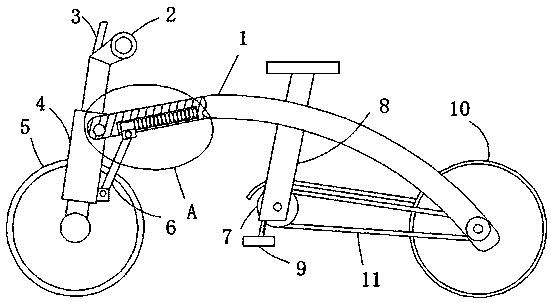
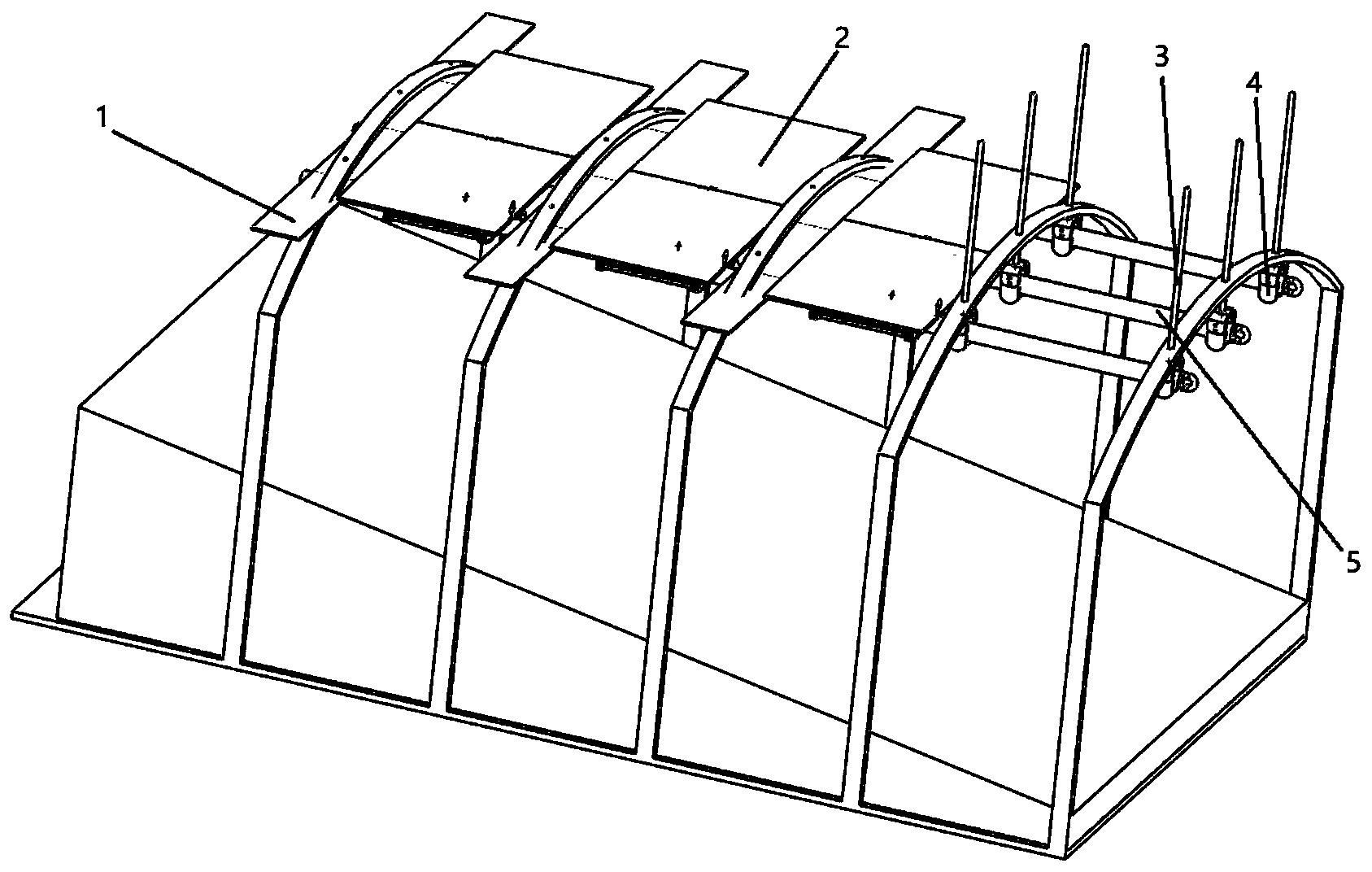
图1本实用新型总体结构(工作状态)示意图;
图2本实用新型总体结构(非工作状态)示意图;
图3本实用新型系统主梁结构示意图;
图4本实用新型悬挂支撑系统示意图;
图5本实用新型轨道结构示意图;
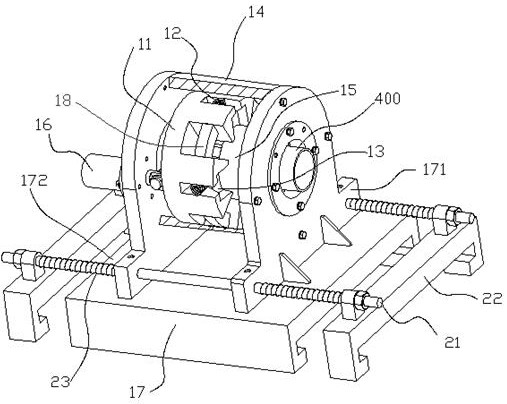
图6本实用新型动力系统结构示意图;
图7本实用新型动力系统传动组件结构示意图;
图8本实用新型动力系统传动组件局部结构示意图;
图9本实用新型超前支护系统结构(工作状态)示意图;
图10本实用新型超前支护系统结构(非工作状态)示意图;
图11本实用新型辅助运输系统外部支撑结构示意图;
图12本实用新型辅助运输系统局部结构示意图;
图13本实用新型辅助运输系统支撑组件结构示意图;
图14本实用新型辅助运输系统中链轮链条运输装置结构示意图;
图15本实用新型辅助运输系统链轮结构示意图;
图16本实用新型辅助运输系统中驱动装置结构示意图;
图17本实用新型辅助运输系统中搬运机械手结构示意图;
图18本实用新型系统主梁与锚固机器人系统连接关系示意图;
图19本实用新型锚固机器人系统结构(非工作状态)示意图;
图20本实用新型锚固机器人系统结构(工作状态)示意图;
图21本实用新型锚固机器人工作平台结构示意图;
图22本实用新型锚固机器人结构示意图。
图中各标号表示:1.悬挂支撑系统;2.动力系统;3.超前支护系统;4.辅助运输系统;5.锚固机器人系统;1-1.系统主梁;1-2.顶梁;1-3.支撑件;1-4.轨道;1-5.长方销;2-1.承重小车;2-2.电机底座;2-3.电机;2-4.齿轮传动系统;2-4-1.从动直齿轮A;2-4-2.从动蜗轮A;2-4-3.蜗杆A;2-4-4.大锥齿轮A;2-4-5.小锥齿轮A;2-4-6.差速器;2-4-7.主动锥齿轮A;2-4-8.锥齿轮B;2-4-9.小锥齿轮B;2-4-10.大锥齿轮B;2-4-11.蜗杆B;2-4-12.从动蜗轮B;2-4-13.从动直齿轮B;3-1.超前支护主梁;3-2.支护网支架;3-3.支护网;3-4.支护网液压伸缩系统;4-1.辅助运输系统支撑组件A;4-2.支撑横梁;4-3.支撑立柱A;4-4.支撑立柱B;4-5.辅助运输系统支撑组件B;4-5-1.下悬挂梁;4-5-2.液压缸;4-5-3.上悬挂梁;4-6.链轮链条运输装置;4-6-1.链条;4-6-2.活动挡块;4-6-3.工字型挡杆;4-6-4.活动挡板、4-6-5.链轮;4-7.驱动装置;4-7-1.锥齿轮AA;4-7-2.锥齿轮BB;4-7-3.伺服电机AA;4-7-4.电机座;4-8.搬运机械手;4-8-1.伺服电机C;4-8-2.机械爪A;4-8-3.机械爪B;4-8-4.前端执行杆;4-8-5.伺服电机A;4-8-6.关节A;4-8-7.伺服电机B;4-8-8.关节B;4-8-9.关节C;5-1.锚固机器人液压缸组;5-2.锚固机器人连接组件;5-2-1.折叠臂A;5-2-2.锚杆架电机;5-2-3.折叠臂B;5-2-4.锚固机器人连接组件液压缸组;5-3.锚固机器人工作平台;5-3-1.折叠液压缸A;5-3-2.折叠液压缸B;5-3-3.中间电机定子;5-3-4.左侧电机定子;5-3-5.撑地液压缸组;5-3-6.连接块;5-3-7.右侧电机定子;5-3-8.电机动子;5-3-9.折叠臂连接液压缸;5-4.锚固机器人;5-4-1.锚杆钻机导轨;5-4-2.推进电机;5-4-3.转动台;5-4-4.锚固大臂;5-4-5.电机C;5-4-6.电机B;5-4-7.电机A;5-4-8.底座箱;5-4-9.转台;5-4-10.机械臂底座;5-4-11.连杆A;5-4-12.连杆B;5-4-13.锚杆钻机驱动链条;5-4-14.锚杆钻机;5-5.锚杆存放装置。
具体实施方式
为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合附图和具体实施方式对本实用新型作进一步详细描述。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
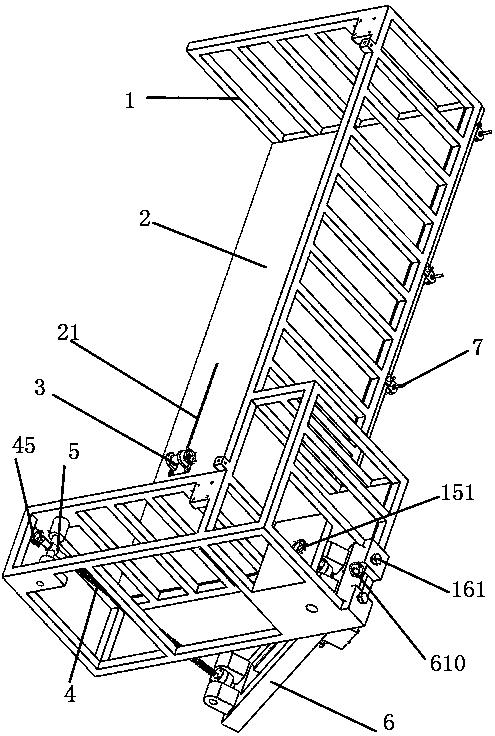
参见图1、图2,一种综掘工作面单轨式锚支护协作机,包含有悬挂支撑系统1、动力系统2、超前支护系统3、辅助运输系统4、锚固机器人系统5;所述悬挂支撑系统1通过锚杆固定在采煤巷道的顶端,为整套设备提供支撑;所述动力系统2安装在所述悬挂支撑系统1中系统主梁1-1的末端;所述超前支护系统3安装在所述悬挂支撑系统1中系统主梁1-1的前端;所述辅助运输系统4安装在所述超前支护系统3后侧的所述悬挂支撑系统1中系统主梁1-1上;所述锚固机器人系统5安装在所述动力系统2与所述辅助运输系统4之间的所述悬挂支撑系统1中系统主梁1-1上;所述一种综掘工作面单轨式锚支护协作机其特征在于,非工作状态时,所述超前支护系统3、所述辅助运输系统4、所述锚固机器人系统5均可收缩,从而使系统的整体空间体积大大减小,便于运输。
参见图3、图4、图5,所述悬挂支撑系统1包括系统主梁1-1、顶梁1-2、支撑件1-3、轨道1-4、长方销1-5;所述轨道1-4的上端焊接有用于安装的结构件,下端两侧焊接有齿条;所述系统主梁1-1通过所述承重小车2-1安装在所述轨道1-4上;所述顶梁1-2开有四个孔,通过锚杆将其固定在采煤巷道的顶端;所述支撑件1-3上端通过所述长方销1-5与所述顶梁1-2连接,下端通过所述长方销1-5与所述轨道1-4连接。
参见图6、图7、图8,所述动力系统2包括承重小车2-1、电机底座2-2、电机2-3、齿轮传动系统2-4;所述电机2-3通过螺栓安装于所述电机底座2-2上;所述电机底座2-2通过螺栓安装于所述承重小车2-1下底面;所述承重小车2-1安装于所述轨道1-4上,且可在所述轨道1-4表面上滑动;所述齿轮传动系统2-4包括从动直齿轮A2-4-1、从动蜗轮A2-4-2、蜗杆A2-4-3、大锥齿轮A2-4-4、小锥齿轮A2-4-5、差速器2-4-6、主动锥齿轮A2-4-7、锥齿轮B2-4-8、小锥齿轮B2-4-9、大锥齿轮B2-4-10、蜗杆B2-4-11、从动蜗轮B2-4-12、从动直齿轮B2-4-13;所述电机2-3输出轴与所述主动锥齿轮A2-4-7通过联轴器连接;所述主动锥齿轮A2-4-7与所述锥齿轮B2-4-8齿间配合;所述锥齿轮B2-4-8与所述差速器2-4-6同轴;所述差速器2-4-6分别通过轴将运动传递到所述小锥齿轮A2-4-5和所述小锥齿轮B2-4-9;所述小锥齿轮A2-4-5与所述大锥齿轮A2-4-4齿间配合;所述大锥齿轮A2-4-4与所述蜗杆A2-4-3同轴;所述蜗杆A2-4-3与所述从动蜗轮A2-4-2齿间配合;所述从动蜗轮A2-4-2与所述从动直齿轮A2-4-1同轴;所述从动直齿轮A2-4-1与所述轨道1-4一侧的齿条齿间配合安装;所述小锥齿轮B2-4-9与所述大锥齿轮B2-4-10齿间配合;所述大锥齿轮B2-4-10与所述蜗杆B2-4-11同轴;所述蜗杆B2-4-11与所述从动蜗轮B2-4-12齿间配合;所述从动蜗轮B2-4-12与所述从动直齿轮B2-4-13同轴;所述从动直齿轮B2-4-13与所述轨道1-4另一侧的齿条齿间配合安装;所述从动直齿轮A2-4-1和所述从动直齿轮B2-4-13分两侧与所述轨道1-4的齿条配合,其特征在于,保证了系统具有良好的变坡特性;所述差速器2-4-6其特征在于,在设备转弯时,使所述从动直齿轮A2-4-1和所述从动直齿轮B2-4-13转动速度不同,从而使设备具有稳定的转弯特性;为了便于设备的行走控制,所述电机2-3为变频一体机。
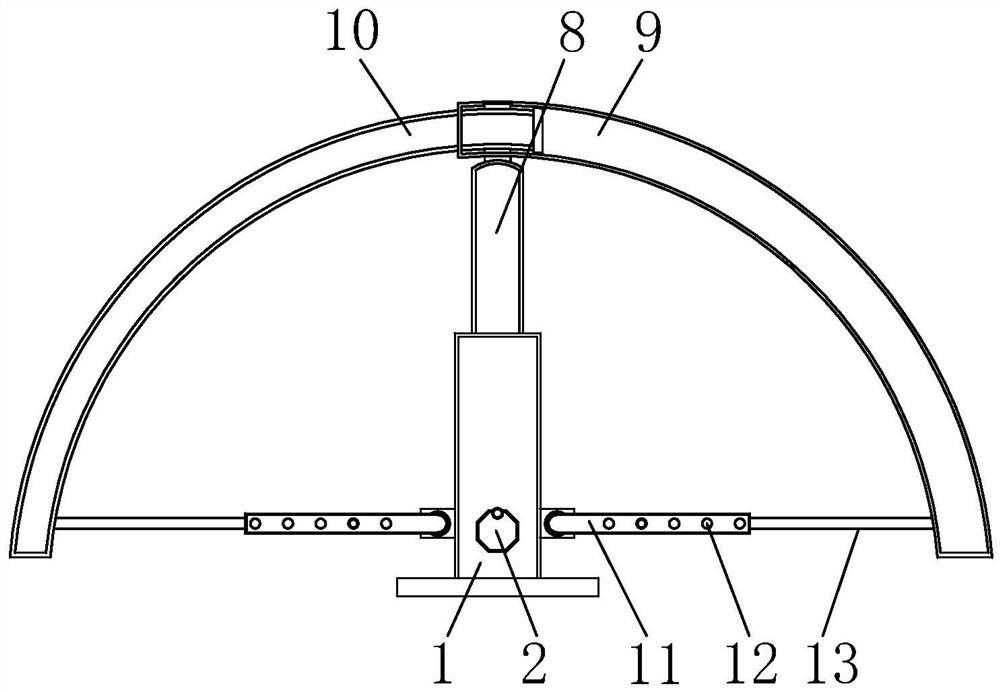
参见图9、图10,所述超前支护系统3包括超前支护主梁3-1、支护网支架3-2、支护网3-3、支护网液压伸缩系统3-4;所述超前支护主梁3-1一端通过销与所述系统主梁1-1连接,另一端通过销与所述支护网支架3-2连接;所述支护网液压伸缩系统3-4一端安装在所述超前支护主梁3-1上,另一端安装于所述支护网支架3-2上;所述支护网3-3系在所述支护网支架3-2上,所述支护网液压伸缩系统3-4可根据被支护设备状态以及所需支护的条件,调整所述支护网3-3的大小,从而实现高效支护。
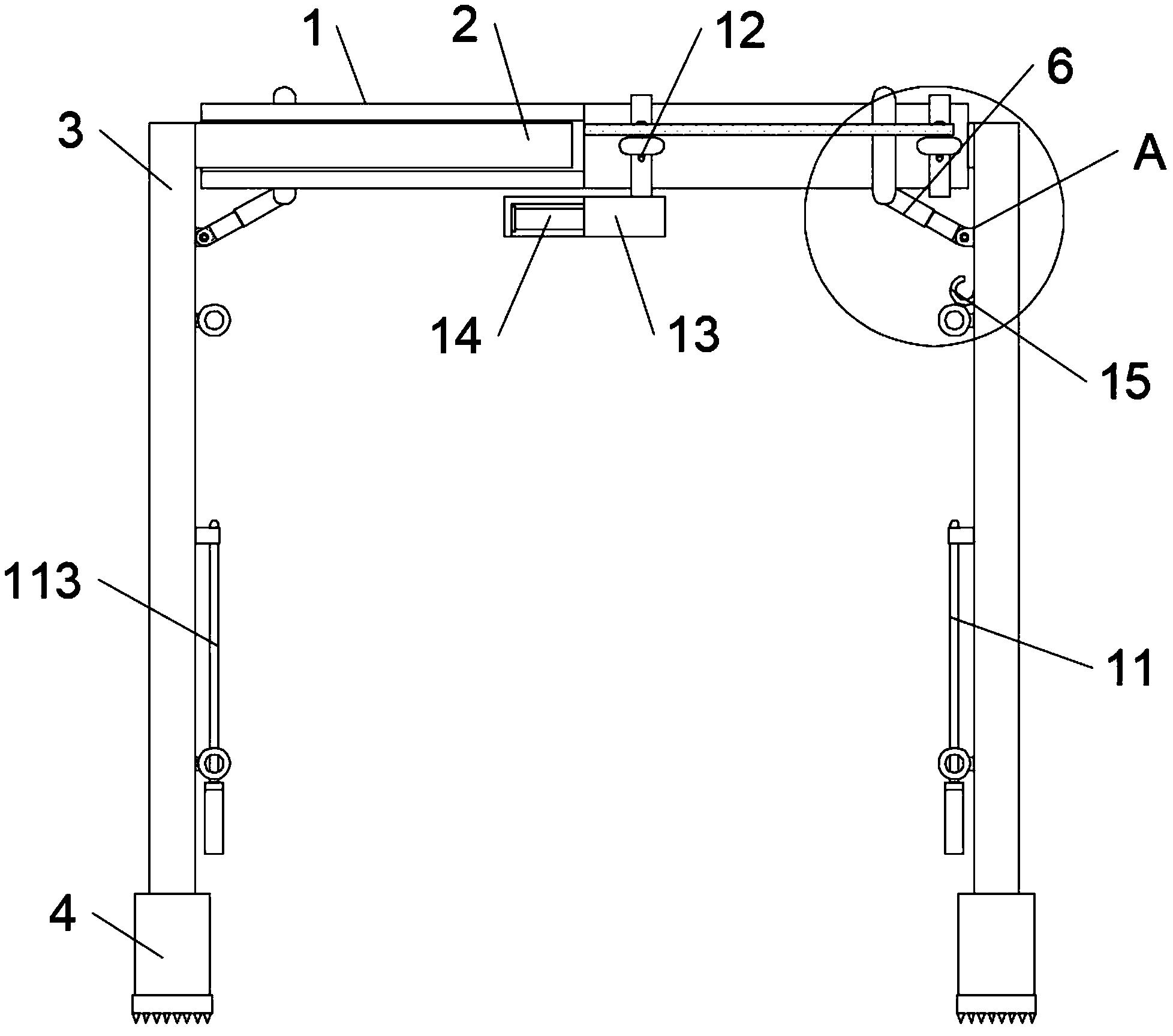
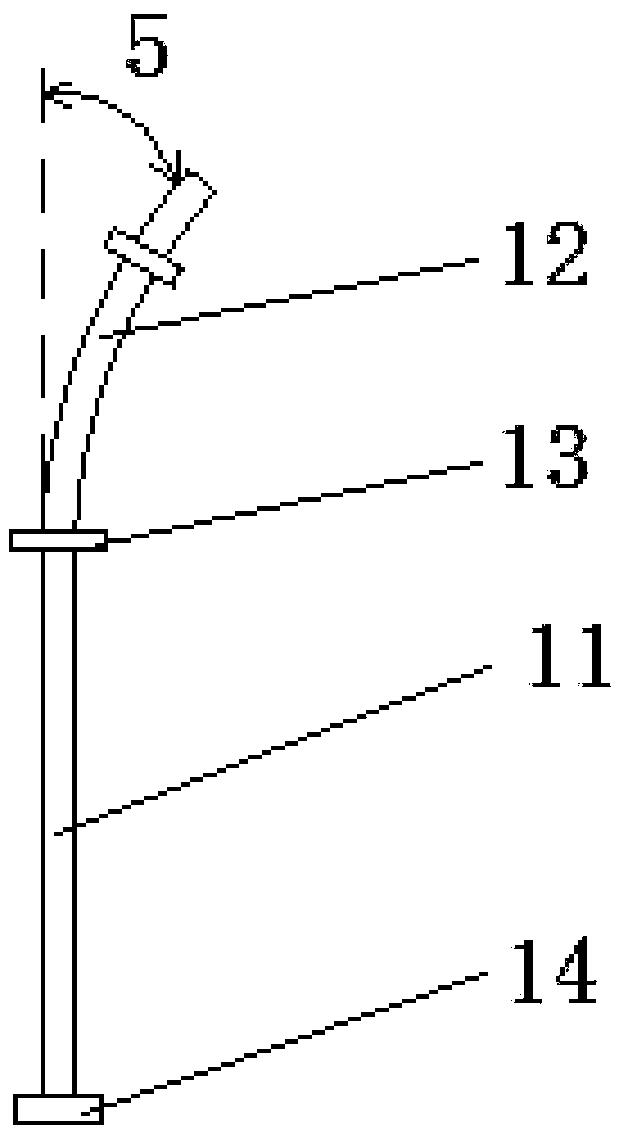
参见图11、图12、图13、图14、图15、图16、图17,所述辅助运输系统4包括辅助运输系统支撑组件A4-1、辅助运输系统支撑组件B4-5、支撑横梁4-2、支撑立柱A4-3、支撑立柱B4-4、链轮链条运输装置4-6、驱动装置4-7、搬运机械手4-8;所述辅助运输系统支撑组件A4-1和所述辅助运输系统支撑组件B4-5均包括上悬挂梁4-5-3、液压缸4-5-2、下悬挂梁4-5-1;所述上悬挂梁4-5-3通过销与所述系统主梁1-1连接;所述下悬挂梁4-5-1通过轴与所述支撑横梁4-2连接;所述液压缸4-5-2一端安装在所述上悬挂梁4-5-3上,另一端安装于所述下悬挂梁4-5-1上;所述支撑立柱A4-3和所述支撑立柱B4-4分两侧一端通过销安装于所述系统主梁1-1,另一端通过销安装于所述支撑横梁4-2的末端;所述链轮链条运输装置4-6包括链条4-6-1、活动挡块4-6-2、工字型挡杆4-6-3、活动挡板4-6-4、链轮4-6-5;所述链轮4-6-5通过啮合带动所述链条4-6-1运动;所述活动挡块4-6-2与所述活动挡板4-6-4通过焊接与所述链条4-6-1连接,其特征在于,存放不同型号的物料;所述工字型挡杆4-6-3一端通过销与所述活动挡块4-6-2连接,另一端嵌入所述活动挡板4-6-4的滑槽中,其特征在于,所述工字型挡杆4-6-3可以在所述活动挡板4-6-4的滑槽中滑动;所述驱动装置4-7包括锥齿轮AA4-7-1、锥齿轮BB4-7-2、伺服电机AA4-7-3、电机座4-7-4;所述链轮4-6-5通过轴与所述驱动装置4-7的所述锥齿轮AA4-7-1连接,所述伺服电机AA4-7-3通过联轴器与所述锥齿轮BB4-7-2连接,所述锥齿轮BB4-7-2与所述锥齿轮AA4-7-1通过齿间配合传输动力,即所述伺服电机AA4-7-3驱动所述链条4-6-1转动,进而实现物料的运输,所述伺服电机AA4-7-3安装于焊接在所述支撑横梁4-2一侧边的所述电机座4-7-4上;所述搬运机械手4-8包括机械爪A4-8-2、机械爪B4-8-3、前端执行杆4-8-4、关节A4-8-6、关节B4-8-8、关节C4-8-9、伺服电机A4-8-5、伺服电机B4-8-7、伺服电机C4-8-1;所述机械爪A4-8-2和所述机械爪B4-8-3分别焊接在所述前端执行杆4-8-4末端的左右两侧;所述前端执行杆4-8-4与所述关节A4-8-6之间通过所述伺服电机A4-8-5及其减速器连接;所述关节A4-8-6与所述关节B4-8-8之间通过所述伺服电机B4-8-7及其减速器连接;所述关节B4-8-8与所述关节C4-8-9之间通过所述伺服电机C4-8-1及其减速器连接;所述关节C4-8-9底部焊接在所述系统主梁1-1的前端。
参见图18、图19、图20、图21、图22,所述锚固机器人系统5包括锚固机器人液压缸组5-1、锚固机器人连接组件5-2、锚固机器人工作平台5-3、锚固机器人5-4、锚杆存放装置5-5;所述锚固机器人连接组件5-2包括折叠臂A5-2-1、锚杆架电机5-2-2、折叠臂B5-2-3、锚固机器人连接组件液压缸组5-2-4;所述折叠臂A5-2-1一端通过销与所述系统主梁1-1连接,另一端通过销与所述折叠臂B5-2-3连接;所述锚固机器人液压缸组5-1在所述系统主梁1-1两侧对称布置,所述锚固机器人液压缸组5-1一端通过销与所述系统主梁1-1连接,另一端通过销与所述折叠臂A5-2-1连接;所述锚固机器人连接组件液压缸组5-2-4为两套液压系统,一端安装于所述折叠臂A5-2-1,另一端安装于所述折叠臂B5-2-3;所述锚杆架电机5-2-2通过螺栓固定在所述折叠臂A5-2-1内侧面;所述锚杆架电机5-2-2输出轴与所述锚杆存放装置5-5相连接控制其转动;所述锚固机器人工作平台5-3包括中间电机定子5-3-3、左侧电机定子5-3-4、撑地液压缸组5-3-5、连接块5-3-6、右侧电机定子5-3-7、电机动子5-3-8、折叠臂连接液压缸5-3-9、折叠液压缸A5-3-1、折叠液压缸B5-3-2;所述折叠臂连接液压缸5-3-9一端通过销与所述折叠臂B5-2-3连接,另一端通过销与所述中间电机定子5-3-3连接;所述左侧电机定子5-3-4、所述中间电机定子5-3-3、所述右侧电机定子5-3-7之间通过所述连接块5-3-6连接;所述折叠液压缸A5-3-1一端安装于所述左侧电机定子5-3-4,另一端安装于所述中间电机定子5-3-3;所述折叠液压缸B5-3-2一端安装于所述右侧电机定子5-3-7,另一端安装于所述中间电机定子5-3-3;所述撑地液压缸组5-3-5分别安装于所述左侧电机定子5-3-4下底面和所述右侧电机定子5-3-7下底面;所述电机动子5-3-8嵌入在所述左侧电机定子5-3-4、所述中间电机定子5-3-3、所述右侧电机定子5-3-7边沿槽中,其特征在于,所述电机动子5-3-8在通电状态下可在所述左侧电机定子5-3-4、所述中间电机定子5-3-3、所述右侧电机定子5-3-7边沿槽中移动;所述锚固机器人5-4包括锚杆钻机导轨5-4-1、推进电机5-4-2、转动台5-4-3、锚固大臂5-4-4、电机C5-4-5、电机B5-4-6、电机A5-4-7、底座箱5-4-8、转台5-4-9、机械臂底座5-4-10、连杆A5-4-11、连杆B5-4-12、锚杆钻机驱动链条5-4-13、锚杆钻机5-4-14;所述锚固机器人5-4通过螺栓固定在所述电机动子5-3-8上;所述锚固机器人5-4下端的所述底座箱5-4-8通过螺栓固定所述电机A5-4-7;所述电机A5-4-7通过安装在所述底座箱5-4-8里的蜗轮蜗杆驱动所述转台5-4-9转动;所述机械臂底座5-4-10通过螺栓固定在所述转台5-4-9上;所述锚固大臂5-4-4通过轴承与所述机械臂底座5-4-10配合;所述电机B5-4-6通过螺栓固定在所述机械臂底座5-4-10一侧表面上;所述电机B5-4-6的输出轴与安装在所述机械臂底座5-4-10上的轴承配合并连接所述锚固大臂5-4-4;所述电机C5-4-5通过螺栓固定在所述锚固大臂5-4-4内侧;所述电机C5-4-5的输出轴与轴承配合安装在所述锚固大臂5-4-4内侧表面上;所述电机C5-4-5的输出轴与所述机械臂底座5-4-10通过轴承连接;所述电机C5-4-5的输出轴末端固定所述连杆A5-4-11;所述连杆B5-4-12一端通过轴承连接所述连杆A5-4-11末端凸台轴,轴承端盖通过螺栓固定在所述连杆B5-4-12上,另一端通过轴承连接所述转动台5-4-3末端凸台轴,轴承端盖通过螺栓固定在所述连杆B5-4-12上;所述推进电机5-4-2安装于所述锚杆钻机导轨5-4-1下侧;所述锚杆钻机5-4-14通过两侧的通孔安装于所述锚杆钻机导轨5-4-1的滑动杆上;所述推进电机5-4-2通过所述锚杆钻机驱动链条5-4-13带动所述锚杆钻机5-4-14在所述锚杆钻机导轨5-4-1中移动。
一种综掘工作面单轨式锚支护协作机,工作过程包括以下步骤:
S1:首先人工在巷道顶板铺设一段轨道1-4,并将装置安装于轨道1-4上;
S2:电机2-3工作时,通过齿轮传动系统2-4使动力系统2在轨道1-4上移动,推动与其连接的系统主梁1-1,从而实现整套装备的运动;
S3:整套设备运行至指定工作位置后,超前支护系统3中的支护网液压伸缩系统3-4推动支护网支架3-2伸展,从而带动支护网3-3展开;随后,辅助运输系统4中的辅助运输系统支撑组件A4-1和辅助运输系统支撑组件B4-5同步动作,使链轮链条运输装置4-6位于指定高度。同时,锚固机器人系统5中的锚固机器人连接组件5-2,在锚固机器人连接组件液压缸组5-2-4和所述折叠臂连接液压缸5-3-9共同作用下摆动一定角度,使锚固机器人工作平台5-3下降一定高度且与地面保持平行,随后,锚固机器人工作平台5-3在折叠液压缸A5-3-1和折叠液压缸B5-3-2作用下展开,撑地液压缸组5-3-5随即伸长,完成撑地动作,其作用为:将锚杆钻机5-4-14在钻孔过程中产生的冲击力吸收并传递给地面,从而使平台更加稳定;
S4:辅助运输系统4中的链轮链条运输装置4-6将作业过程中所需物料传送至指定位置;搬运机械手4-8抓取顶梁1-2至巷道特定位置;锚固机器人5-4和锚杆存放装置5-5同时调整位置,使锚杆存放装置5-5中的一支锚杆装入锚杆钻机5-4-14上,完成装锚杆动作;
S5:锚固机器人5-4调整不同姿态,实现锚杆钻机5-4-14在巷道侧面和顶板不同位置处的锚固作业,且将顶梁1-2通过锚杆固定在顶板上,为整套设备提供支撑;
S6:搬运机械手4-8抓取搭建悬挂支撑系统1所需的物料,安装于顶梁1-2上;搬运机械手4-8抓取轨道1-4使其上端与悬挂支撑系统1连接,末端与前一段轨道1-4前端相连,完成轨道铺设;
S7:超前支护系统3、辅助运输系统4、锚固机器人系统5中用于调整形态的液压系统收缩,电机2-3驱动整套装备向前移动,继续上述步骤,重复锚护和支护作业。
最后所应说明的是,以上具体实施方式仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,其均应涵盖在本实用新型的权利要求范围当中。
一种综掘工作面单轨式锚支护协作机专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0