







专利摘要
一种多级运载航天器分离可靠性仿真平台,所述多级运载航天器包括上面级和下面级,仿真平台包括试验参数设置子系统、分离动力学仿真子系统和可靠性分析子系统。试验参数设置子系统作为仿真平台的底层,通过读取标准参数设置文件进行随机试验参数的配置并利用界面调整修改部分参数。分离动力学仿真子系统按三个阶段对多级运载航天器进行分离动力学仿真。可靠性分析子系统,根据分离动力学仿真子系统多次仿真过程中得到的数据,分析整个分离阶段分离的可靠性和显著性水平。本发明将分离系统与可靠性理论相结合,实现了从配置、仿真到可靠性验证的一体化分析。
权利要求
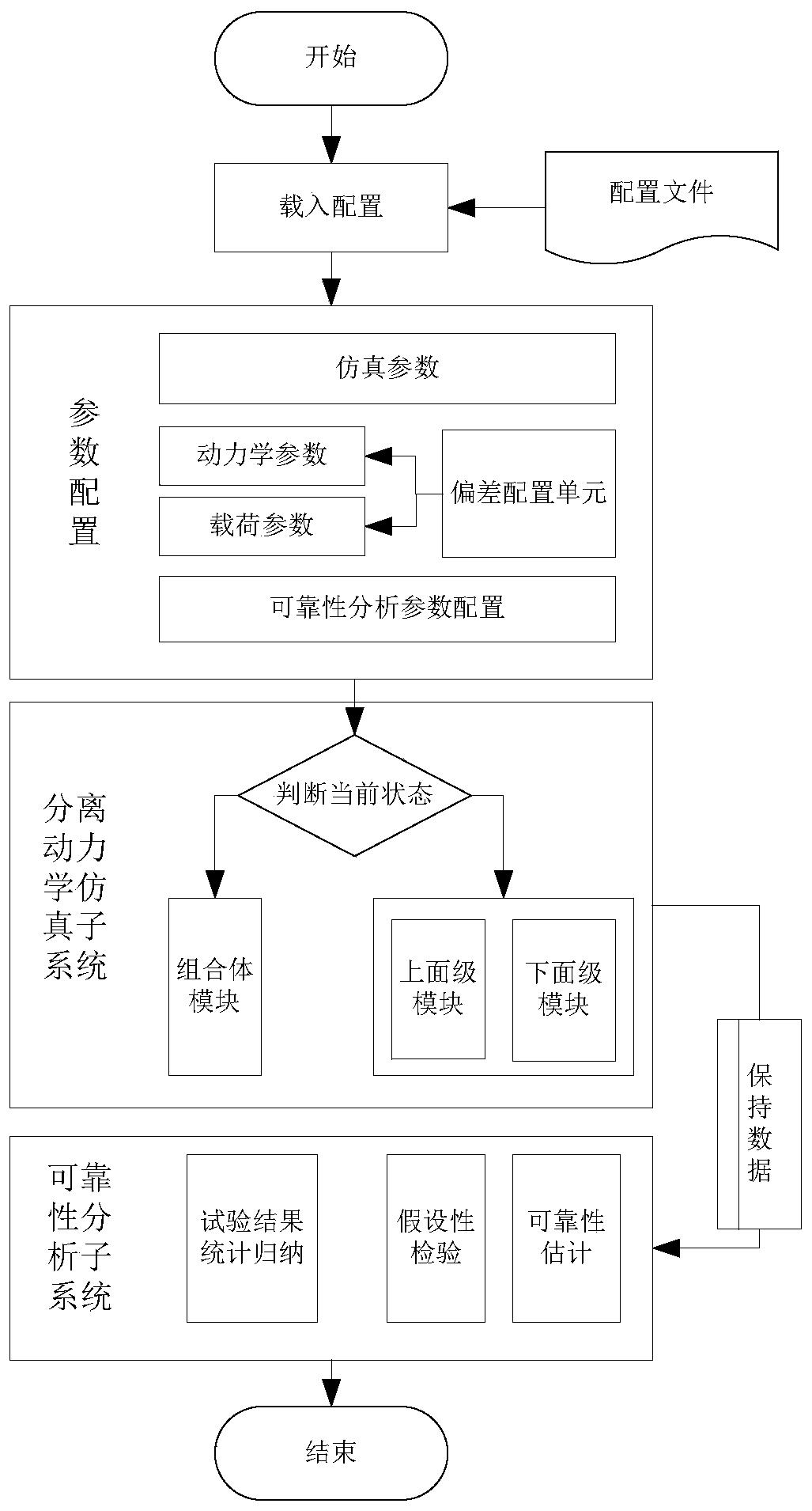
1.一种多级运载航天器分离可靠性仿真平台,其特征在于:所述多级运载航天器包括上面级和下面级,仿真平台包括试验参数设置子系统、分离动力学仿真子系统和可靠性分析子系统:
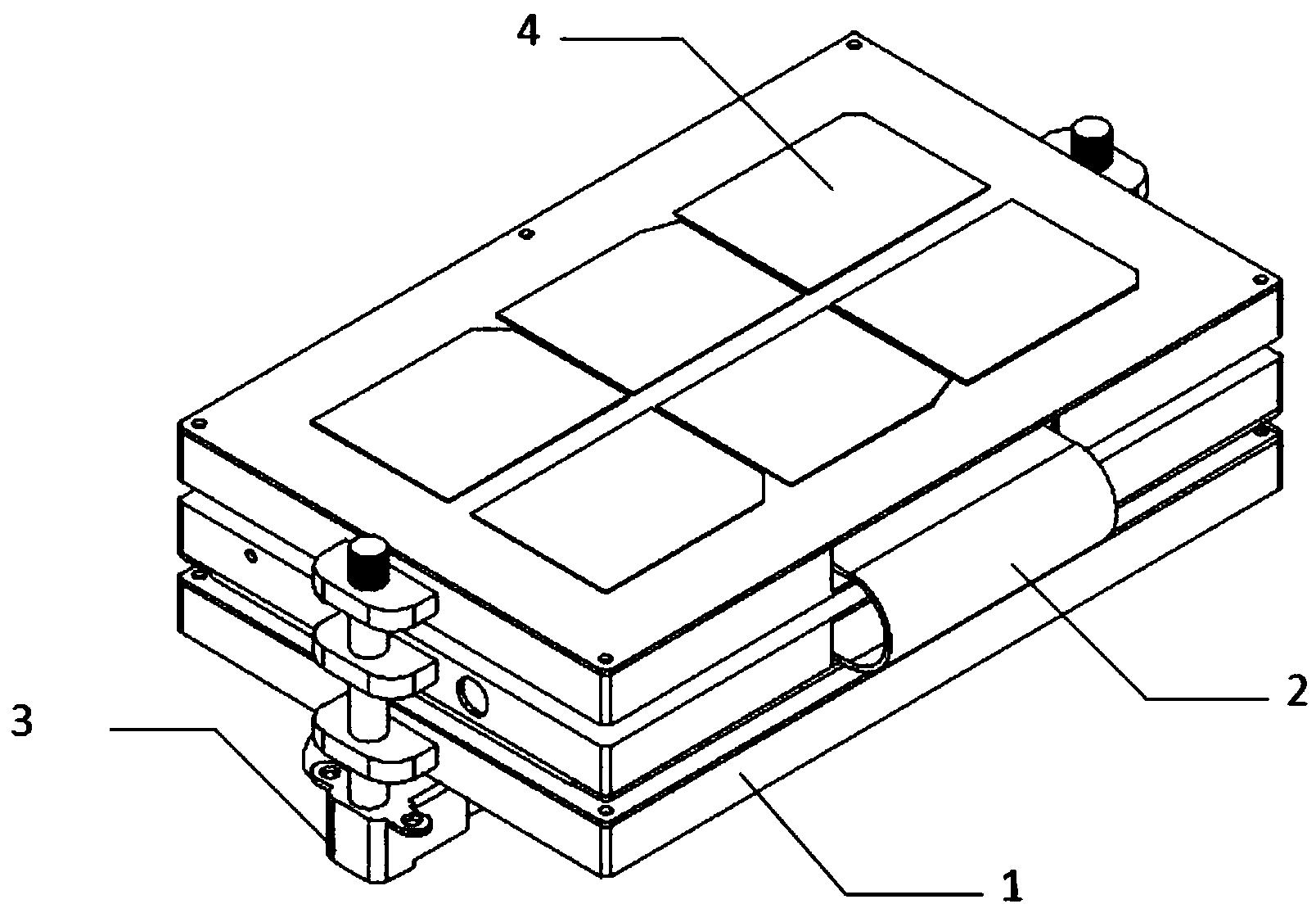
试验参数设置子系统作为仿真平台的底层,通过读取标准参数设置文件进行随机试验参数的配置并利用界面调整修改部分参数;试验参数设置子系统包括仿真参数设置模块、动力学参数设置模块、载荷参数设置模块、气动配置模块、偏差配置单元以及可靠性分析参数配置模块,仿真参数设置模块用于配置仿真时间、积分步长、仿真试验次数;动力学参数设置模块包括设置组合体质心初始位置、初始速度、初始姿态角、初始姿态角速度,设置上面级、下面级各自的质量、转动惯量和在分离坐标系中各自质心的位置矢量;载荷参数设置模块包括设置发动机安装位置、安装角、推力差值文件路径,增减反推火箭个数并设置每个反推火箭的安装位置、安装角、推力差值文件路径,增减分离接头并设置每个分离接头的在分离坐标系下的位置、分离拉脱阻力的作用距离范围、拉脱阻力的系数,设置固定锁或导向销的分离模式,其中导向销分离模式还要设置导向销的安装位置、刚度系数和阻尼系数;气动配置模块包括设置上面级、下面级和组合体的特征面积、特征长度和压心系数、轴向力系数、法向力系数、横向力系数、风场参数的差值文件路径;偏差配置单元载入偏差分布类型和对应分布的参数,为多次仿真试验中分离动力学仿真子系统的输入参数提供偏差参数;可靠性分析参数配置模块用于设置可靠性判据、极限安全距离、特征点对位置;其中特征点对设置有多组,用于多级运载航天器分离可靠性评估;多组特征点对是指由用户在上面级和下面级间设置的多组特征点对,任一组特征点对均由位于多级运载航天器其上面级上的任意一点以及位于多级运载航天器其下面级上的任意一点组成;
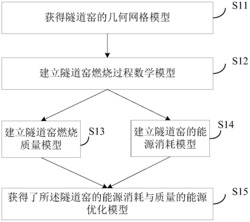
分离动力学仿真子系统建立多级运载航天器运动仿真模型按三个阶段对多级运载航天器进行分离动力学仿真:仿真初始阶段,多级运载航天器的上面级和下面级未分离,在发动机推力、空气动力和地球引力作用下,以组合体的形式进行二体运动;多级运载航天器的上面级和下面级开始分离后,多级运载航天器的上面级以及下面级受到发动机推力、空气动力和地球引力作用,还受到分离机构的约束内力,上面级和下面级各自进行受约束的二体运动;多级运载航天器的上面级以及下面级完全分离后,分离机构的约束内力消失,上面级和下面级按二体自由运动飞行;
利用分离动力学仿真子系统多次仿真,获得多次仿真试验过程中分离阶段各组特征点对中上、下面级特征点间的距离;
可靠性分析子系统,根据分离动力学仿真子系统多次仿真过程中换算得到的分离阶段各组特征点对中上、下面级特征点间的距离,统计分析整个分离阶段中各组特征点对中上、下面级特征点间距离的最大值、最小值和平均值以及分离的可靠性和显著性水平。
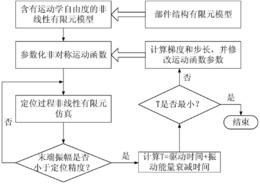
2.根据权利要求1所述的多级运载航天器分离可靠性仿真平台,其特征在于:分离动力学仿真子系统包括多级运载航天器动力学仿真模块、上面级航天器动力学仿真模块和下面级动力学仿真模块,在仿真初始阶段,建立组合体运动仿真模型对该阶段的多级运载航天器进行运动仿真;在多级运载航天器的分离阶段以及上面级和下面级完全分离后的自由运动阶段,建立上面级运动仿真模型、下面级运动仿真模型分别对这两个阶段的上面级、下面级进行运动仿真;由上面级运动仿真模型、下面级运动仿真模型和组合体运动仿真模型实时计算到上面级和下面级质心的位置、速度以及各自的姿态角;通过试验参数设置子系统设置的多组特征点对中上、下面级特征点相对于各自质心的位置,实时换算出分离阶段各组特征点对中上、下面级特征点间的距离。
3.根据权利要求2所述的多级运载航天器分离可靠性仿真平台,其特征在于:上面级运动仿真模型、下面级仿真模型和组合体仿真模型如下:
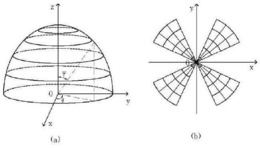
(1)定义以下坐标系:
定义发射坐标系o
定义分离坐标系o
定义组合体坐标系o
定义上面级体坐标系o
定义下面级体坐标系o
(2)上面级运动仿真模型
在分离坐标系中,上面级的质心运动学、质心动力学方程为
式中,r
在上面级体坐标系下,上面级的姿态运动为防止发生奇异,定义了正欧拉角运动方程、反欧拉角运动方程以及绕上面级质心动力学方程:
正欧拉角运动方程为
其中,姿态按2-3-1即偏航ψ
反欧拉角运动方程为
其中,姿态按照3-2-1即俯仰
上面级绕自身质心动力学方程为
式中,I
(3)下面级运动仿真模型
在分离坐标系中,下面级的质心运动学、质心动力学方程为
式中,r
在下面级体坐标系下,下面级的姿态运动为防止发生奇异,定义了正欧拉角运动方程、反欧拉角运动方程以及绕下面级质心动力学方程:
正欧拉角运动方程为
其中,姿态按2-3-1即偏航ψ
反欧拉角运动方程为
其中,姿态按照3-2-1即俯仰
下面级绕自身质心动力学方程为
式中,I
(4)组合体运动仿真模型
在发射坐标系下,组合体的质心运动学、质心动力学方程为
式中,r
在组合体坐标系下,组合体绕组合体质心的动力学方程为
式中,I
组合体转动惯量I
其中,I
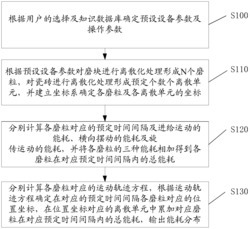
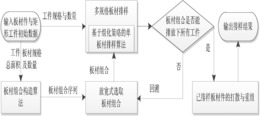
4.根据权利要求1所述的多级运载航天器分离可靠性仿真平台,其特征在于:所述的可靠性分析子系统,对各组特征点对中上、下面级特征点间的距离进行可靠性分析,可靠性分析过程如下:
(1)试验数据的统计归纳
按照可靠性分析参数配置模块设置的可靠性判据,计算得到对特征点对最小距离的统计数据;
(2)可靠度的非参数假设检验的显著水平计算;
(3)建立可靠度估计模型,并给出分离可靠的概率。
5.根据权利要求4所述的多级运载航天器分离可靠性仿真平台,其特征在于:可靠性判据为以下两个判据中的任一个:
判据一、第k次仿真试验中用户指定的参考时刻t
判据二、第k次仿真试验中[t
通过可靠性判据求出N
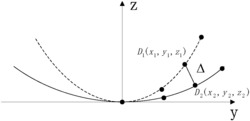
6.根据权利要求5所述的多级运载航天器分离可靠性仿真平台,其特征在于:步骤(2)可靠度的非参数假设检验的显著水平计算中,以特征点对中的上、下面级特征点在t
步骤1:将总体d
步骤2:在H
步骤3:在H
式中,
步骤4:计算Pearson统计量
步骤5:计算卡方分布函数
其中k=2,为观测估计的参数个数;
步骤6:显著性水平为
α1=1-F(N
7.根据权利要求6所述的多级运载航天器分离可靠性仿真平台,其特征在于:步骤(3)中可靠度估计模型为:
8.多级运载航天器运动仿真模型,其特征在于:所述多级运载航天器运动仿真模型,所述多级运载航天器包括上面级和下面级,包括上面级运动仿真模型、下面级仿真模型和组合体仿真模型,上面级运动仿真模型、下面级仿真模型和组合体仿真模型如下:
(1)定义以下坐标系:
定义发射坐标系o
定义分离坐标系o
定义组合体坐标系o
定义上面级体坐标系o
定义下面级体坐标系o
(2)上面级运动仿真模型
在分离坐标系中,上面级的质心运动学、质心动力学方程为
式中,r
在上面级体坐标系下,上面级的姿态运动为防止发生奇异,定义了正欧拉角运动方程、反欧拉角运动方程以及绕上面级质心动力学方程:
正欧拉角运动方程为
其中,姿态按2-3-1即偏航ψ
反欧拉角运动方程为
其中,姿态按照3-2-1即俯仰
上面级绕自身质心动力学方程为
式中,I
(3)下面级运动仿真模型
在分离坐标系中,下面级的质心运动学、质心动力学方程为
式中,r
多级运载航天器分离可靠性仿真平台专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0