






专利摘要
本发明公开了一种基于柔性铰链的模块化六自由度精密微动机构,其中包括有第一原始驱动块、输出架、第二原始驱动块、第三原始驱动块、固定面板、安装面板;该装置由压电系统驱动,其中压电驱动系统包括信号发生器、功率放大器和压电陶瓷几部分;信号发生器生成信号源,通过功率放大器将信号发生器的输出信号放大,从而促动压电陶瓷产生直线位移,此外压电陶瓷推动柔性铰链使得装置实现各项位移;第一原始驱动块、第二原始驱动块、第三原始驱动块均由直梁型铰链所构成的平行四边形结构垂直排布组成。
权利要求
1.一种基于柔性铰链的模块化六自由度精密微动机构,其特征在于,包括:
安装面板;
固定面板,其固定可拆卸的安装在所述安装面板上;
第一原始驱动块,其可拆卸的安装在所述固定面板上;
其中,所述第一原始驱动块上包括多个第一竖直支撑架、在所述第一竖直支撑架之间柔性连接的第一直接驱动块和与所述第一直接驱动块柔性连接的第一输出块;
第二原始驱动块,其可拆卸的安装在所述固定面板上;
其中,所述第二原始驱动块上包括多个竖直支撑板、多个第二竖直支撑架,在所述竖直支撑板之间柔性连接的第二直接驱动块、在所述第二直接驱动块和所述第二竖直支撑架之间柔性连接的第三直接驱动块和与所述第二直接驱动块和所述第三直接驱动块同时柔性连接的第二输出块;
两个第三原始驱动块,其可拆卸的安装在所述固定面板上;
其中,所述第三原始驱动块包括多个第三竖直支撑架、在所述第三竖直支撑架之间柔性连接的第四直接驱动块、第五直接驱动块和与所述第四直接驱动块和所述第五直接驱动块同时柔性连接的第三输出块;
输出架,其同时可拆卸的与所述第一输出块、所述第二输出块和所述第三输出块连接;
其中,所述第一原始驱动块、所述第二原始驱动块、所述第三原始驱动块均由直梁型柔性链所构成的平行四边形结构在所述固定面板上垂直排布组成。
2.如权利要求1所述的基于柔性铰链的模块化六自由度精密微动机构,其特征在于,所述第一原始驱动块还包括:
第一底板,其可拆卸的安转在所述固定面板上;
所述第一竖直支撑架为2个,对称固定安装在所述第一底板上。
3.如权利要求2所述的基于柔性铰链的模块化六自由度精密微动机构,其特征在于,所述第二原始驱动块还包括:
第二底板,其可拆卸的安装在所述固定面板上;
所述竖直支撑板和所述第二竖直支撑架固定安装在所述第二底板上;
所述第二竖直支撑架包括2个第二竖直主支撑架和第二竖直副支撑架;
其中,所述第三直接驱动块柔性连接在所述第二竖直副支撑架和所述第二直接驱动块之间。
4.如权利要求3所述的基于柔性铰链的模块化六自由度精密微动机构,其特征在于,所述第二原始驱动块还包括:
连接块,其柔性连接在所述第二竖直主支撑架之间,并且同时与所述第二输出块柔性连接。
5.如权利要求4所述的基于柔性铰链的模块化六自由度精密微动机构,其特征在于,所述第三原始驱动块还包括:
第三底板,其可拆卸的安装在所述固定面板上;
所述第三竖直支撑架固定安装在所述第三底板上;
所述第三竖直支撑架包括4个第三竖直主支撑架和2个第三竖直副支撑架;
其中,所述第四直接驱动块柔性连接在所述第三竖直副支撑架之间,所述第五直接驱动块柔性连接在靠近所述第三竖直副支撑架的2个所述第三竖直主支撑架之间。
6.如权利要求5所述的基于柔性铰链的模块化六自由度精密微动机构,其特征在于,所述输出架还包括:
第一导向块,其可拆卸的与所述第一输出块连接;
第二导向块,其可拆卸的与所述第二输出块连接;
第三导向块,其两端可拆卸的同时与两个所述第三输出块连接;以及
第四输出块,其柔性连接在所述第一导向块和所述第二导向块之间,并且同时与所述第三导向块的中部柔性连接。
7.如权利要求5所述的基于柔性铰链的模块化六自由度精密微动机构,其特征在于,所述第一底板、所述第二底板和所述第三底板上均设置通孔,其用于与所述固定面板可拆卸的连接。
8.如权利要求7所述的基于柔性铰链的模块化六自由度精密微动机构,其特征在于,所述第一底板、所述第二底板和所述第三底板上均设置预紧螺纹孔,其用于压电陶瓷预紧。
9.如权利要求8所述的基于柔性铰链的模块化六自由度精密微动机构,其特征在于,所述第一底板、所述第二底板和所述第三底板上均设置销孔,用于分别对所述第一原始驱动块、所述第二原始驱动块和所述第三原始驱动块定位。
10.如权利要求9所述的基于柔性铰链的模块化六自由度精密微动机构,其特征在于,在所述第一输出块、所述第二输出块和所述第三输出块上均开设有装配孔,用于可拆卸的安装所述输出架。
说明书
技术领域
本发明涉及振动辅助加工技术领域,具体涉及一种基于柔性铰链的模块化六自由度精密微动机构。
背景技术
振动辅助加工技术是一种利用数控加工技术以及振动装置加工微结构表面等带有复杂微尺寸形状零件的一门技术。与传统的加工工艺不同,振动辅助加工根据被加工表面的表面特征生成加工策略,即建立工具和工件的进给运动,根据进给运动曲线的变化频率和大小拆解为数控加工机床控制部分以及微运动装置控制部分。将进给量较大或者变化频率相对较低的部分利用数控加工实现,将进给量较小或者频率变化相对较高的部分利用微动装置实现。微动装置辅助制造特别对于微结构型表面的加工有着至关重要的作用,一方面微动装置高频率输出增加了加工效率,另一方面微动装置运动精度较高、灵敏度较高,对于微结构型表面甚至普通数控机床难以制造的微纳表面提出了解决方案。
对于振动辅助加工技术而言,微动装置的设计直接影响到了加工灵活性、加工效率以及加工精度。对于加工轴数较多的情况下,要求微动装置同样具有多自由度的微动能力,空间六自由度装置的设计极大提高了加工灵活性。由于数控机床工具运行的过程中存在转动惯量且运动精度受限,六自由度微动装置间接消除了机床微动的运动误差,提高了机床的加工精度范围,使得微结构型表面加工技术更加稳定高效。
精密定位/进给是在微纳加工技术、微电子工程、生物工程、精密工程、计量科学技术等领域的关键技术。随着精密定位技术的发展,对于定位精度的要求也随之增加。传统的密定位平台均采用并联形式,也能够满足大多数的状况下的需求,但是刚性构件运动过程中的间隙、摩擦、磨损等问题难以解决。由于这些因素的影响,刚性紧密定位精度仅停留在微米级别。柔性铰链机构的设计避免了上述的不足,将定位水平提升到纳米级别。本发明的六自由度紧密微动机构同样采用并联形式,在并联刚性构件的基础上,利用柔性铰链提升精度。六自由度精密微动机构也对于装置定位的灵活性提供了极大的便利。
发明内容
本发明设计开发了一种基于柔性铰链的模块化六自由度精密微动机构,本发明的发明目的是解决振动辅助加工中的一些问题,提升辅助装置的自由度即提高加工的灵活性能,提高辅助装置的固有频率即提高加工效率,提高辅助装置的运行精度即提高加工精度。利用压电陶瓷驱动,实现了加工的微纳分辨率及解决了微结构创成及加工问题。
本发明提供的技术方案为:
一种基于柔性铰链的模块化六自由度精密微动机构,包括:
安装面板;
固定面板,其固定可拆卸的安装在所述安装面板上;
第一原始驱动块,其可拆卸的安装在所述固定面板上;
其中,所述第一原始驱动块上包括多个第一竖直支撑架、在所述第一竖直支撑架之间柔性连接的第一直接驱动块和与所述第一直接驱动块柔性连接的第一输出块;
第二原始驱动块,其可拆卸的安装在所述固定面板上;
其中,所述第二原始驱动块上包括多个竖直支撑板、多个第二竖直支撑架,在所述竖直支撑板之间柔性连接的第二直接驱动块、在所述第二直接驱动块和所述第二竖直支撑架之间柔性连接的第三直接驱动块和与所述第二直接驱动块和所述第三直接驱动块同时柔性连接的第二输出块;
两个第三原始驱动块,其可拆卸的安装在所述固定面板上;
其中,所述第三原始驱动块包括多个第三竖直支撑架、在所述第三竖直支撑架之间柔性连接的第四直接驱动块、第五直接驱动块和与所述第四直接驱动块和所述第五直接驱动块同时柔性连接的第三输出块;
输出架,其同时可拆卸的与所述第一输出块、所述第二输出块和所述第三输出块连接;
其中,所述第一原始驱动块、所述第二原始驱动块、所述第三原始驱动块均由直梁型柔性链所构成的平行四边形结构在所述固定面板上垂直排布组成。
优选的是,所述第一原始驱动块还包括:
第一底板,其可拆卸的安转在所述固定面板上;
所述第一竖直支撑架为2个,对称固定安装在所述第一底板上。
优选的是,所述第二原始驱动块还包括:
第二底板,其可拆卸的安装在所述固定板上;
所述竖直支撑板和所述第二竖直支撑架固定安装在所述第二底板上;
所述第二竖直支撑架包括2个第二竖直主支撑架和第二竖直副支撑架;
其中,所述第三直接驱动块柔性连接在所述第二竖直副支撑架和所述第二直接驱动块之间。
优选的是,所述第二原始驱动块还包括:
连接块,其柔性连接在所述第二竖直主支撑架之间,并且同时与所述第二输出块柔性连接。
优选的是,所述第三原始驱动块还包括:
第三底板,其可拆卸的安装在所述固定板上;
所述第三竖直支撑架固定安装在所述第三底板上;
所述第三竖直支撑架包括4个第二竖直主支撑架和2个第二竖直副支撑架;
其中,所述第四直接驱动块柔性连接在所述第三竖直副支撑架之间,所述第五直接驱动块柔性连接在靠近所述第三竖直副支撑架的所述第三竖直主支撑架之间。
优选的是,所述输出架还包括:
第一导向块,其可拆卸的与所述第一输出块连接;
第二导向块,其可拆卸的与所述第二输出块连接;
第三导向块,其两端可拆卸的同时与两个所述第三输出块连接;以及
第四输出块,其柔性连接在所述第一导向块和所述第二导向块之间,并且同时与所述第三导向块的中部柔性连接。
优选的是,所述第一底板、所述第二底板和所述第三底板上均设置通孔,其用于与所述固定面板可拆卸的连接;
优选的是,所述第一底板、所述第二底板和所述第三底板上均设置预紧螺纹孔,其用于压电陶瓷预紧。
优选的是,所述第一底板、所述第二底板和所述第三底板上均设置销孔,用于分别对所述第一原始驱动块、所述第二原始驱动块和所述第三原始驱动块定位。
优选的是,在所述第一输出块、所述第二输出块和所述第三输出块上均开设有装配孔,用于可拆卸的安装所述输出架。
本发明与现有技术相比较所具有的有益效果:
1、该发明由不同的模块组成,在不同的应用场合可配备不同的模块。如,若需要输出位移较大则可更具所需范围,为两自由度模块添加位移放大结构;若需要提高输出响应频率,也可调整为响应频率性能更好的模块。对于不同的性能需求。若需五自由度即可,则也可以通过更换模块实现。例如将第一原始驱动块及第二原始驱动块的X向自由度去掉,则实际上输出端为沿Y、Z向移动以及绕X、Y、Z轴转动的五自由度运动机构;
2、该发明所有运动机构均采用电火花一体化加工,在模块之间的连接均采用刚性连接,避免了运动误差。采用压电陶瓷驱动,保证了不同运动测量下机构高精度的位移或角度的输出。压电陶瓷均采用螺钉预紧,与机构固定在一起,各个方向的柔性铰链均集中在装置中心,压电陶瓷置于最外层,保证了机构更加紧凑;
3、机构在多处采用对称设计,包括平行四边形机构的设计及部件之间的对称,避免了外界影响的影响,增加运动可靠性;
4、机构整体运行为并联结构原理,在XOY平面采用三支链并联策略,实现了沿X、Y向移动及绕Z轴转动三个自由度。在Z向采用四支链并联策略实现了沿Z向移动以及绕X、Y轴转动三个自由度,结构简单运行可靠;
5、运动传递形式采用柔性铰链机构,通过薄板弹性变形原理实现,具有无隙传动、无摩擦等优点,保证精密微动机构的运动精度。
附图说明
图1是本发明基于柔性铰链的模块化六自由度精密微动机构的结构图。
图1A是本发明基于柔性铰链的模块化六自由度精密微动机构的另一视角结构图。
图2是本发明第一原始驱动块结构图。
图2A是本发明第一原始驱动块的正视图。
图2B是本发明第一原始驱动块的俯视图。
图2C是本发明第一原始驱动块的侧视图。
图3是本发明第二原始驱动块结构图。
图3A是本发明第二原始驱动块的正视图。
图3B是本发明第二原始驱动块的俯视图。
图3C是本发明第二原始驱动块的侧视图。
图3D是本发明第三原始驱动块的另一视角结构图。
图4是本发明第三原始驱动块结构图。
图4A是本发明第三原始驱动块的正视图。
图4B是本发明第三原始驱动块的侧视图。
图4C是本发明第三原始驱动块的俯视图。
图5是本发明输出架结构图。
图6是本发明装配面板结构图。
图7是本发明固定面板结构图。
图8为X向平移及绕Z轴转动原理图。
图9为Y向平移原理。
图10为Z向平移及绕X和Y轴转动原理图。
图11为本发明所述的机构三维视图。
图12为本发明所述的机构三维视图。
图13为本发明所述的机构局部三维视图。
图14为X向运动有限元仿真结果示意图。
图15为绕Y轴转动有限元仿真结果示意图。
图16为Z向运动有限元仿真结果示意图。
图17为绕X轴旋转运动有限元仿真结果示意图。
图18为Y向运动有限元仿真结果示意图。
图19为绕Z轴旋转运动有限元仿真结果示意图。
具体实施方式
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
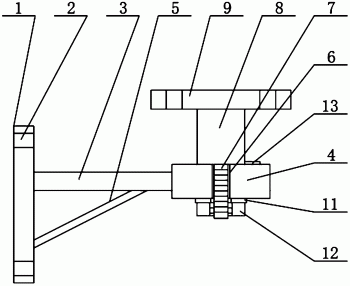
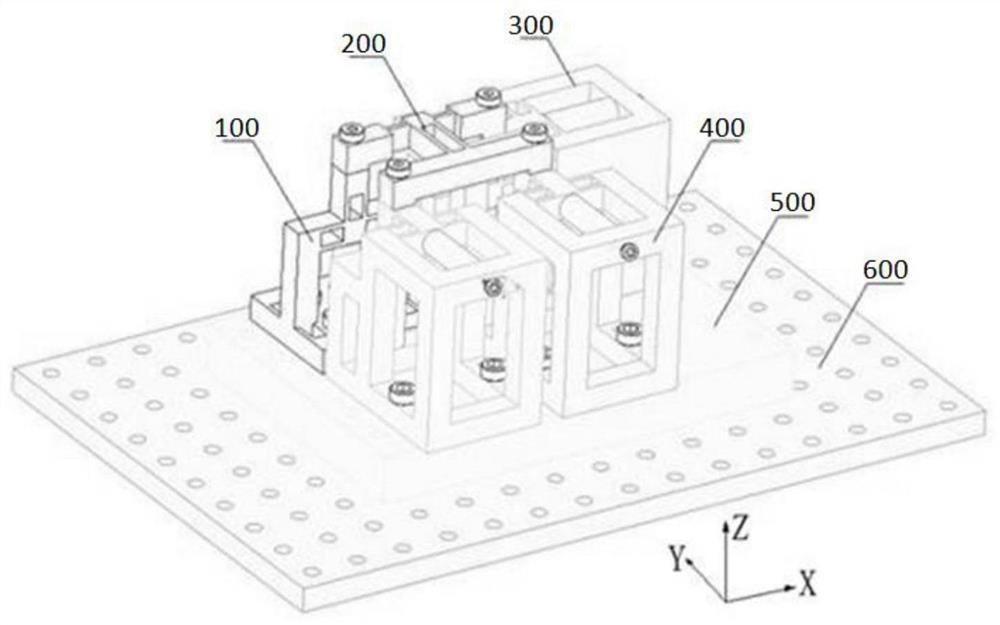
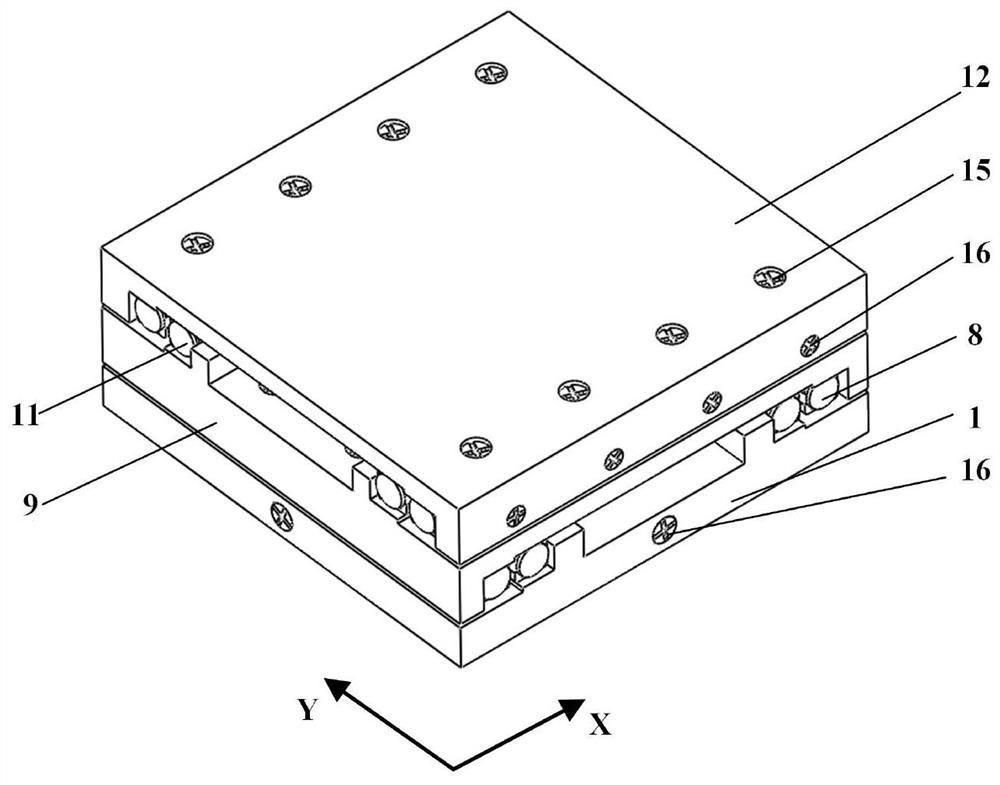
如图1所示,本发明提供了一种基于柔性铰链的模块化六自由度精密微动机构,其主体结构包括第一原始驱动块100、输出架200、第二原始驱动块300、第三原始驱动块400、固定面板500、安装面板600;固定面板500固定可拆卸的安装在安装面板600上;第一原始驱动块100可拆卸的安装在固定面板500上;其中,第一原始驱动块100上包括多个第一竖直支撑架111、112,在第一竖直支撑架111、112之间柔性连接的第一直接驱动块120和与第一直接驱动块120柔性连接的第一输出块130;第二原始驱动块300可拆卸的安装在固定面板500上;其中,第二原始驱动块300上包括多个竖直支撑板351、352,多个第二竖直支撑311、312、313,在竖直支撑板之间柔性连接的第二直接驱动块322、在第二直接驱动块322和第二竖直支撑架312之间柔性连接的第三直接驱动块321和与所述第二直接驱动块322和所述第三直接驱动块321同时柔性连接的第二输出块330;两个第三原始驱动块400可拆卸的安装在固定面板500上;其中,第三原始驱动块400包括多个第三竖直支撑架411~415、在第三竖直支撑架之间柔性连接的第四直接驱动块431、第五直接驱动块432和与第四直接驱动块431和第五直接驱动块432同时柔性连接的第三输出块440;输出架200同时可拆卸的与第一输出块130、第二输出块330和第三输出块440连接。
该装置由压电系统驱动,其中压电驱动系统包括信号发生器、功率放大器和压电陶瓷几部分;信号发生器生成信号源,通过功率放大器将信号发生器的输出信号放大,从而促动压电陶瓷产生直线位移,此外压电陶瓷推动柔性铰链使得装置实现各项位移。
第一原始驱动块100、第二原始驱动块300、第三原始驱动块400均由直梁型铰链所构成的平行四边形结构垂直排布组成;第一原始驱动块100具有X、Z向两个自由度;其中,Z向由电陶瓷直接驱动,X向的自由度是为了输出架200上的输出块具有X向自由度;第二原始驱动块300也具有X向以及Z向两个自由度,且X、Z两向均由压电陶瓷直接驱动;第三原始驱动块400具有Y、Z两个方向的自由度,且Y、Z两向均由压电陶瓷直接驱动;输出架200的四个驱动端分别与第一原始驱动块100、第二原始驱动块300、第三原始驱动块400的输出端相连诱导输出架的输出端产生六自由度位移;装配板500上表面应保证平面度,通过销定位实现第一原始驱动块100、第二原始驱动块300以及两个第三原始驱动块400四个零件的装配;从整体的原理上来看,XOY平面的三个自由度由三条支链相并联组成;Z向移动以及绕X、Y轴转动三个自由度由四条Z向支链并联而成。
在本发明中,六自由度是指沿X、Y、Z三向的移动和绕X、Y、Z三向的转动,本发明设计的六自由度精密微动机构为了减少装配误差,柔性铰链均通过电火花线切割工艺加工而成,模块之间均为刚性连接,材料为铝合金。柔性铰链采用直梁型柔性铰链。
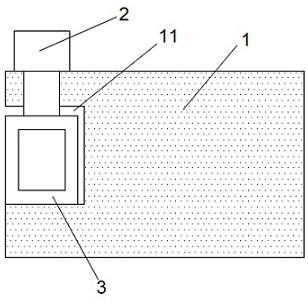
如图2、图2A~2C所示,在另一种实施例中,第一原始驱动块100是由压电陶瓷驱动的具有X向和Z向两个方向自由度的柔性铰链机构,为了实现最终输出端的X向移动,第一原始驱动块100仅仅安装一个驱动器,由于压电陶瓷负载大小对于输出位移影响较大,同时为了结构更加简单,提高装置频率,直接采用两个压电陶瓷垂直排布,直接推动一对直梁型柔性铰链带动输出末端运动,直接驱动块与机架所形成的平行四边形结构保证了直接输出块沿压电方向的平动,避免压电陶瓷承受剪力,直梁型铰链均成对布置,构成了平行四边形结构起到导向作用,减少寄生误差,提高运行精度;作为一种优选,在本实施例中,第一原始驱动块100包括有第一竖直支撑架111、第一竖直支撑架112、第一直接驱动块120、第一输出块130;其中,第一竖直支撑架111和第一竖直支撑架112结构相同均与第一原始驱动块底板连接,第一竖直支撑架111、第一竖直支撑架112起支撑固定作用,为压电陶瓷装配留出空间;第一原始驱动块底板开设有通孔141、通孔142、通孔143和通孔144,用于第一原始驱动块100与固定面板500螺纹固定连接;Z向定位依靠第一原始驱动块底面;第一原始驱动块100开设有圆锥销孔151和圆锥销孔152,用于第一原始驱动块100的XOY平面定位;第一直接驱动块120直接受压电Z向驱动,直梁型铰链所构建的平行四边形结构保证了第一直接驱动块120的稳定沿Z向输出,可防止压电陶瓷受到剪力;第一直接连接块120和竖直支撑架111、112分别与两对处于垂直状态的X向和Z向铰链连接,保证平行四边形原理避免耦合过大;第一输出块130是第一原始驱动块100的输出端,具有两个方向的自由度,但在实际运行中该部分仅仅有Z向一个驱动,另外的X向自由度用来配合输出架200的移动;第一原始驱动块100输出装配孔131用于固定输出架200,为了防止输出架200具有绕螺栓转动自由度采用弹簧垫圈或止动垫片防松;第一原始驱动块100底板开设有预紧螺纹孔160设计为沉头孔,螺栓由底向上装入,螺栓采用细螺纹,螺栓帽完全沉入体中,防止影响Z向定位;支撑架、直接驱动块、连接块和输出块之间均采用一对柔性铰链连接而成,且柔性铰链均采用平行四边形布置,保证了各个块之间均沿各向平动,提高了输出稳定性及运行精度;输出块上的螺纹孔用来与输出架固定。
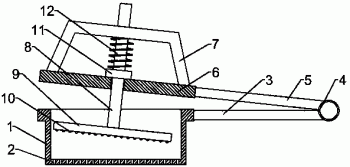
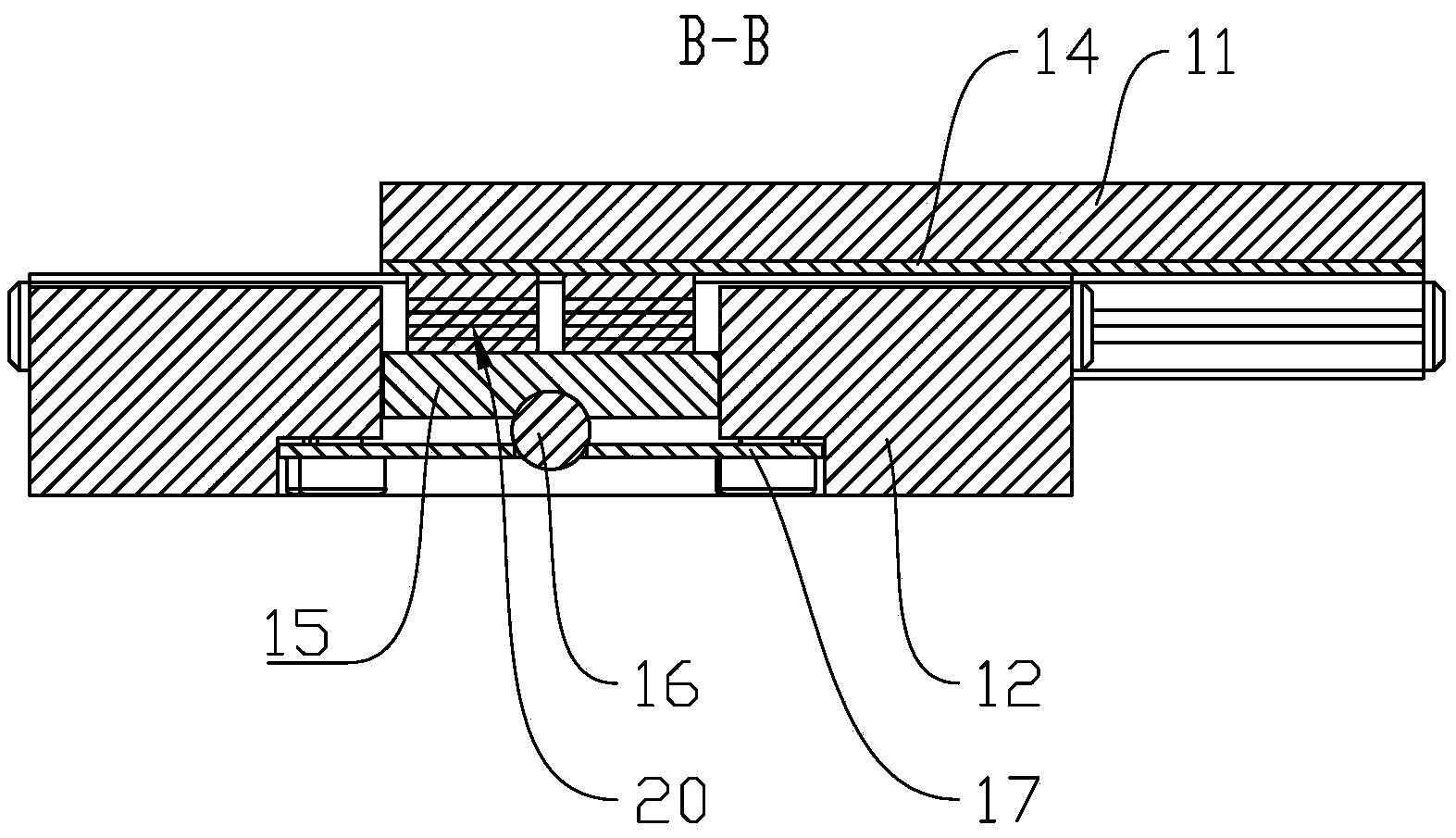
如图3、图3A~3D所示,在另一种实施例中,第二原始驱动块300也同样具有X向和Z向两个方向自由度的柔性铰链机构,但与第一原始驱动块100不同的是具有两个驱动器,实现两个方向位移,直梁型铰链均成对排布构建平行四边形结构;作为一种优选,在本实施例中,第二原始驱动块300包括有第二竖直支撑架311、第二竖直支撑架312、第二竖直支撑架313、第二直接驱动块322、连接块340、第二输出块330、第三直接驱动块321、竖直支撑板352、竖直支撑板351;其中,第二竖直支撑架311和第二竖直支撑架313结构相同起支撑固定,用来支撑直梁型柔性铰链;第二竖直支撑架312起支撑固定作用,为压电陶瓷提供装配空间;竖直支撑板352和竖直支撑板351结构相同起支撑固定作用,为压电陶瓷提供装配空间;第三直接驱动块321直接受压电Z向驱动,直梁型铰链所构建的平行四边形结构保证了第三直接驱动块321的稳定沿Z向输出,可防止压电陶瓷受到剪力;连接块340与两对处于垂直状态的X向和Z向铰链连接,保证平行四边形原理避免耦合过大;装配孔331用于固定输出架200,为了防止输出架200具有绕螺栓转动自由度采用弹簧垫圈或止动垫片防松;第二输出块330具有X向和Z向两个方向的自由度,在实际使用过程中,分别有不同方向的压电陶瓷的两个驱动器,实现两个方向位移;第二直接驱动块322直接受压电X向驱动,直梁型铰链也保证其沿X向稳定输出;螺纹孔361设计为沉头孔,螺栓由右向左装入,顶紧压电陶瓷;第二原始驱动块底板开设有通孔371、通孔372、通孔373,用于第二原始驱动块200与固定面板500固定;第二原始驱动块300开设有圆锥销孔381、圆锥销孔382,用于第二原始驱动块300的XOY平面定位,Z向定位依靠第二原始驱动块300底面与固定面板500表面定位;第二原始驱动块底板开设有螺纹孔362,设计为沉头孔,螺栓由底向上装入,以顶紧压电陶瓷,螺栓帽应沉入孔中,避免影响Z向定位;所述支撑架、直接驱动块、连接块和输出块之间均采用一对柔性铰链连接而成,且柔性铰链均采用平行四边形布置,保证了各个块之间均沿各向平动,提高了输出稳定性及运行精度;输出块上的螺纹孔用来与输出架固定。
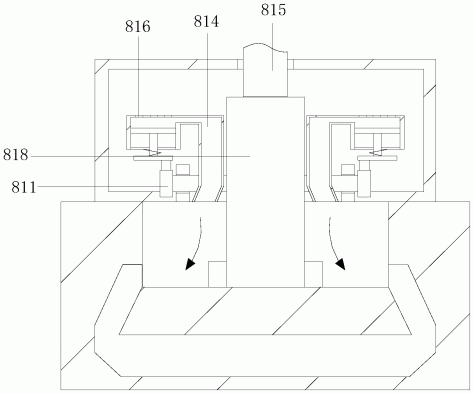
如图4、图4A~4C所示,在另一种实施例中,第三原始驱动块400是压电陶瓷驱动的具有Y向和Z向两个方向自由度的柔性铰链机构,但不同的是由于两个第三原始驱动块400共同驱动同一个输出架200,第三导向块213在两个第三原始驱动块400的不同策略的驱动下应具有Y向、Z向移动以及、绕Y、Z向转动的自由度,故直梁型铰链的选择同样兼故了在两向力矩驱动下的输出块的移动能力,所以在两个第三原始驱动块400的驱动下,第三导向块213出了可以实现Y、Z两向移动的自由度同时也派生出了绕Y、Z向转动的自由度;作为一种优选,在本实施例中,第三原始驱动块400,包括有第三竖直支撑架411、第三竖直支撑架412、第三直接驱动块321、第三输出块440、第五直接驱动块432、横向支撑架421、横向支撑架422、第三竖直支撑架413、第三竖直支撑架414、第三竖直支撑架415;其中,螺纹孔462用于压电陶瓷预紧,设计为沉头孔使得螺栓帽完全沉入体中,避免影响第四直接驱动块431Z向定位,预紧螺栓采用细螺纹;第三竖直支撑架411、第三竖直支撑架412结构相同起支撑固定作用,为压电陶瓷提供装配空间;第四直接驱动块431受压电陶瓷沿Z向驱动,直梁型柔性铰链组成平行四边形结构,保证了第四直接驱动块431稳定的沿Z轴输出;第三输出块440具有Y向和Z向两个方向的自由度,两个驱动器压电陶瓷为输出端提供了两个方向的位移;装配孔441用于固定输出架200,为了防止输出架200具有绕螺栓转动自由度采用弹簧垫圈或止动垫片防松;第五直接驱动块432受压电陶瓷沿Y向驱动,直梁型柔性铰链组成平行四边形结构,保证了第四直接驱动块431稳定的沿Y轴输出;横向支撑架421、横向支撑架422结构相同起固定作用,为压电陶瓷提供了装配空间;第三原始驱动块400开设有底板螺纹孔461设计为沉头孔,螺栓由右向左装入,顶紧压电陶瓷;第三竖直支撑架413、第三竖直支撑架414结构相同起支撑固定作用,使得横向支撑架与底板相连,固定到装配架上;第三原始驱动块400开设有圆锥销孔470,起XOY平面定位作用,Z向定位靠底平面和装配板表面保证;第三原始驱动块400开设有通孔451、通孔452,用来将第三导向块213固定到固定面板500上;支撑架、直接驱动块、连接块和输出块之间均采用一对柔性铰链连接而成,且柔性铰链均采用平行四边形布置,保证了各个块之间均沿各向平动,提高了输出稳定性及运行精度;输出块上的螺纹孔用来与输出架固定。
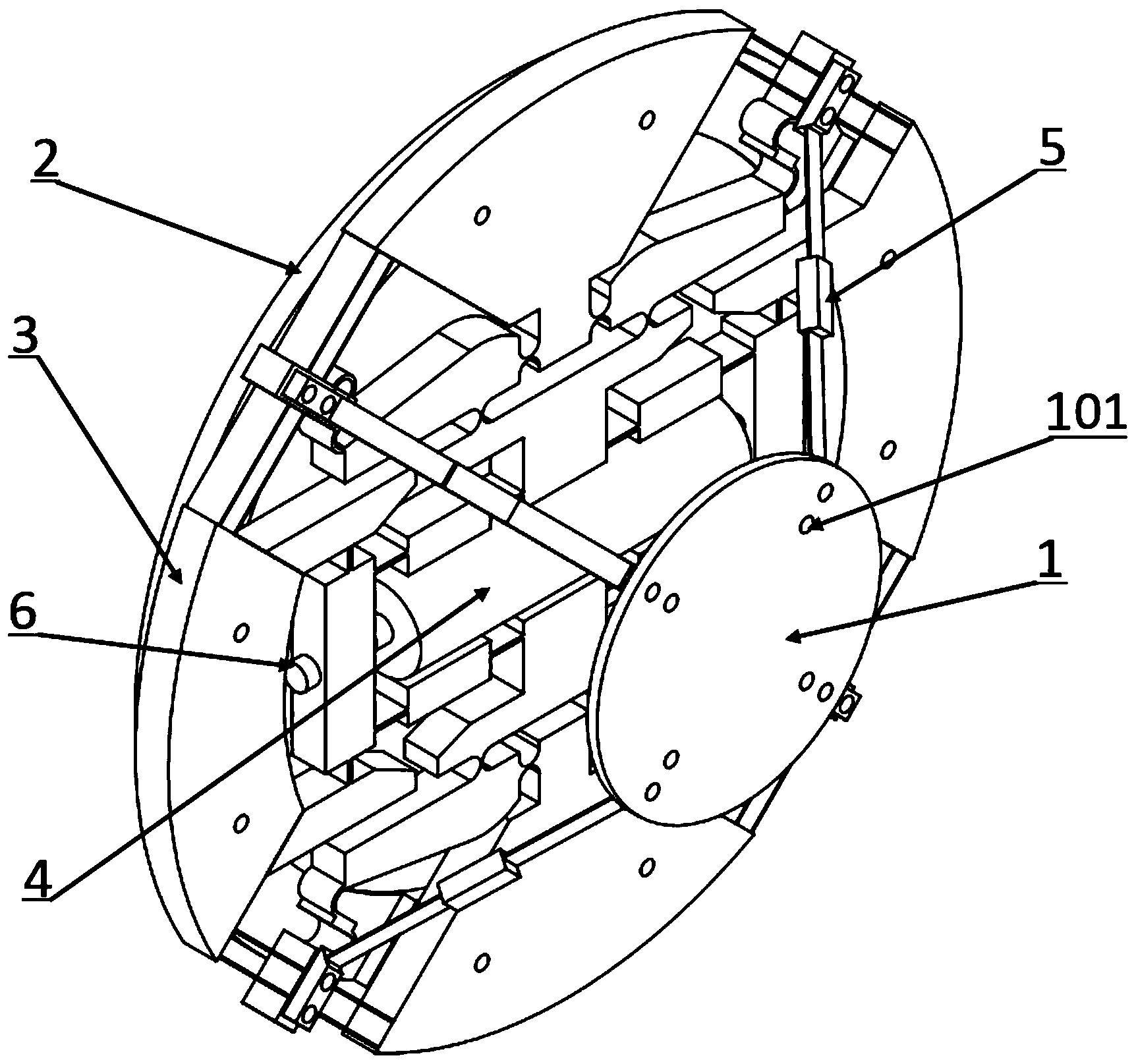
如图5所示,在另一种实施例中,输出架200包括有第一导向块211、第四输出块220、第二导向块212、第三导向块213;通孔231用于与第三原始驱动块400的第三输出块440固定;通孔232用于与第一原始驱动块100的第一输出块130固定;第一导向块211继承第一原始驱动块100的自由度,具有X向和Z向两个方向的自由度,第一导向块211在第一原始驱动块100输出端的推动下可以沿Z向运动;第四输出块220为装置的最终输出末端,具有沿X、Y、Z三向移动及绕X、Y、Z三向转动的六个自由度;第二导向块212继承第二原始驱动块300的自由度,具有X向和Z向两个方向的自由度,第二导向块212在第二原始驱动块300输出端的推动下可以沿X向和Z向运动;通孔234用于与第二原始驱动块300的第二输出块330固定;通孔233用于与第三原始驱动块400的第三输出块440固定;第三导向块213继承两个第三原始驱动块400的运动,具有沿Y向移动,沿Z向移动两个自由度,并派生绕Z轴转动的自由度;第四输出块220与第三导向块213之间的两个直梁型柔性铰链构成平行四边形机构,使得第四输出块220始终平行于第三导向块213,由于第三导向块213具有沿Y轴位移以及绕Z轴转动的自由度,故第四输出块220也具有这两个自由度;由于第一导向块211以及第二导向块212都具有沿X向移动的自由度,所以第四输出块220在第二导向块212的驱动下具有沿X向移动的自由度;由于第一导向块211以及第二导向块212、第三导向块213都具有Z向自由度,故第四输出块220具有沿Z轴移动以及绕X轴、Y轴转动三个自由度。
本发明中的X向移动组件如图1、图1A所示;在第二原始驱动块300中,X向压电陶瓷致动提供X向直线位移,X向直接驱动块受到沿X向的力,两对直梁型柔性铰链产生沿X向变形,使得直接驱动块稳定沿X向移动。直接驱动块又将力传到Z向柔性铰链上,由于Z向直梁型铰链在X向呈现出立板型,即Z向柔性铰链在X向刚度较大,故发生变形极小,可忽略不计;Z向柔性铰链又与输出端相连,故输出端受到沿X向驱动力;由于输出端与Z向直接驱动块和固定架之间均具有X向柔性铰链,故机构在X向刚度较小,在输出块受到X向驱动力的情况下,输出块沿X向移动;第二输出块330又与输出架第二导向块212相连,故将力传到了输出架200上。
在输出架200中,由于第一导向块211、第四输出块220以及第二导向块212通过Z向铰链相连,故在输出加上X向刚度较大。同时,第四输出块220和第三导向块213通过一对平行四边形结构相连,保证了第三导向块213和第四输出块220的平行,防止了Z向直梁型铰链在受到侧向扰动情况下稳定性下降。第三导向块213和第四输出块220通过X向柔性铰链连接故X向刚度较小受到X向力时发生X向位移。
综上在X向驱动测可提供驱动力,在输出导向部分X向刚度较小,故在X向压电陶瓷驱动下输出块沿着X向移动。
本发明中的Y向移动组件及绕Z轴转动组件如图1、图1A所示;在两个第三原始驱动块400中,Y向压电陶瓷致动提供Y向直线位移,Y向直接驱动块受到沿Y向的力,两对直梁型柔性铰链产生沿Y向变形,使得直接驱动块稳定沿Y向移动。直接驱动块又将力传到Z向柔性铰链上,由于Z向直梁型铰链在Y向呈现出立板型,即Z向柔性铰链在Y向刚度较大,故发生变形极小,可忽略不计。Z向柔性铰链又与输出端相连,故输出端受到沿Y向驱动力。由于输出端与Z向直接驱动块均具有Y向柔性铰链,故机构在Y向刚度较小,在输出块受到Y向驱动力的情况下,输出块沿Y向移动。第三输出块440又与第三导向块213相连,故将力传到了输出架200上。
在输出架200中,由于第三导向块213与两个第三原始驱动块400相连,两个第三原始驱动块块400均产生Y向位移,故第三导向块213产生沿Y向的位移,第三导向块213与第四输出块220直接通过一对X向直梁型柔性铰链相连,由于X向铰链在Y向刚度较大,故将Y向力传递给输出块,第四输出块220与第一导向块211和第二导向块212之间通过单个Y向直梁型铰链连接,Y向直梁型铰链Y向刚度较小,故在第四输出块220受到Y向力的情况下沿Y向移动。由于第四输出块220与第三导向块213之间通过一对直梁型铰链连接,形成平行四边形结构,保证了第四输出块220的稳定输出。
若两个第三原始驱动块400输出位移不一致,则第三导向块213发生绕Z轴转动。由于第三导向块213和第四输出块220之间由一对直梁型柔性铰链构成,保证了第四输出块220和第三导向块213平行,即第三导向块213向第四输出块220传递了绕Z轴转动的转矩,第四输出块220与第一导向块211和第二导向块212均为单直梁型铰链相连,故第四输出块220绕Z轴转动刚度较小。在此时第四输出块220受到绕Z轴转动的转矩时,第四输出块220应随着绕Z轴发生转动。
在本发明中的Z向移动,绕X轴、Y轴转动组件如图1、图1A所示;在第一原始驱动块100中,Z向压电陶瓷致动提供Z向直线位移,Z向直接驱动块受到沿Z向的力,两对直梁型柔性铰链产生沿Z向变形,使得直接驱动块稳定沿Z向移动。直接驱动块又将力传到X向柔性铰链上,由于X向直梁型铰链在Z向呈现出立板型,即X向柔性铰链在Z向刚度较大,故发生变形极小,可忽略不计。X向柔性铰链又与输出端相连,故输出端受到沿Z向驱动力。第一输出块130又与第一导向块211相连,故将力传到了输出架200上。
在第二原始驱动块300中,Z向压电陶瓷致动提供Z向直线位移,Z向直接驱动块受到沿Z向的力,两对直梁型柔性铰链产生沿Z向变形,使得直接驱动块稳定沿Z向移动。直接驱动块又将力传到X向柔性铰链上,由于X向直梁型铰链在Z向呈现出立板型,即X向柔性铰链在Z向刚度较大,故发生变形极小,可忽略不计。X向柔性铰链又与输出端相连,故输出端受到沿Z向驱动力。由于输出端与Z向直接驱动块和固定架之间均具有Z向柔性铰链,故机构在Z向刚度较小,在输出块受到Z向驱动力的情况下,输出块沿Z向移动。第二输出块330又与第二导向块212相连,故将力传到了输出架200上。
在第三原始驱动块400中,Z向压电陶瓷致动提供Z向直线位移,Z向直接驱动块受到沿Z向的力,两对直梁型柔性铰链产生沿Z向变形,使得直接驱动块稳定沿Z向移动。直接驱动块又将力传到Y向柔性铰链上,由于Y向直梁型铰链在Z向呈现出立板型,即Y向柔性铰链在Z向刚度较大,故发生变形极小,可忽略不计。Y向柔性铰链又与输出端相连,故输出端受到沿Z向驱动力。由于输出端与Z向直接驱动块和固定架之间均具有Z向柔性铰链,故机构在Z向刚度较小,在输出块受到Z向驱动力的情况下,输出块沿Z向移动。第三输出块440又与第三导向块213相连,故将力传到了输出架200上。
在输出架200中,由于第一导向块211、第二导向块212以及第三导向块213分别与第一原始驱动块100、第二原始驱动块300、第三原始驱动块400相连,第一原始驱动块100、第二原始驱动块300、第三原始驱动块400相连的输出块又均产生Z向运动,故输出块产生Z向移动。同时,若产生位移不一致则输出块绕着X轴或Y轴发生偏转,故也具有绕X轴和Y轴转动的自由度。
如图6所示,安装面板600上设有多个限位安装孔,销孔,沉头连接孔;其中,限位安装孔起到与固定面板500固定的作用;销孔分别起到第一原始驱动块100、第二原始驱动块300、第三原始驱动块400的定位作用;沉头连接孔分别用来第一原始驱动块100、第二原始驱动块300、第三原始驱动块400的固定。
在本发明中,销孔是为了对微动机构在安装面板XOY平面的定位。
结合本发明的所提供的基于柔性铰链的模块化六自由度精密微动机构对其工作原理坐如下说明:
如图8所示,X向平移原理和绕Z轴转动原理为:当块3和块4为固定端,当F1和F2驱动的位移相等时,块1沿着x向平移,根据平行四边形原理块2也随着块1沿X向平移。
当F1和F2驱动的位移不相等时,如F1驱动的位移大于F2驱动的位移,此时块1绕Z轴转动,根据平行四边形原理,块2随着块1绕Z轴转动。
如图9所示,Y向平移原理为:当块4、5为固定端,在F3的作用下,1、2、3块均沿着Y向移动,由于块2和块4由俩个平行连杆连接而成,根据平行四边形原理,块2移动方向应平行于块4,块3的设计是为了实现结构的基本对称也就是为了使得在载荷F3的作用下块2尽量不受转矩。
如图10所示,Z向平移及绕X和Y轴转动原理为:1、2、3、4块都是仅沿Z向移动的滑块,4为输出块。当F4、F5、F6、F7驱动的位移均相等时,输出平台沿着z向平动。当F4、F5、F6、F7其中一种力驱动的位移较小时,输出平台便在沿着该力的方向倾斜,如F4驱动的位移等于F5驱动的位移,同时F6驱动的位移等于F7驱动的位移且大于F4驱动的位移时,输出平台可实现绕X轴转动。F5驱动的位移等于F6驱动的位移,同时F4驱动的位移等于F7驱动的位移且大于F5驱动的位移时,输出平台可实现绕Y轴转动。
对本发明所提供的基于柔性铰链的模块化六自由度精密微动机构进行有限元验证说明如下:
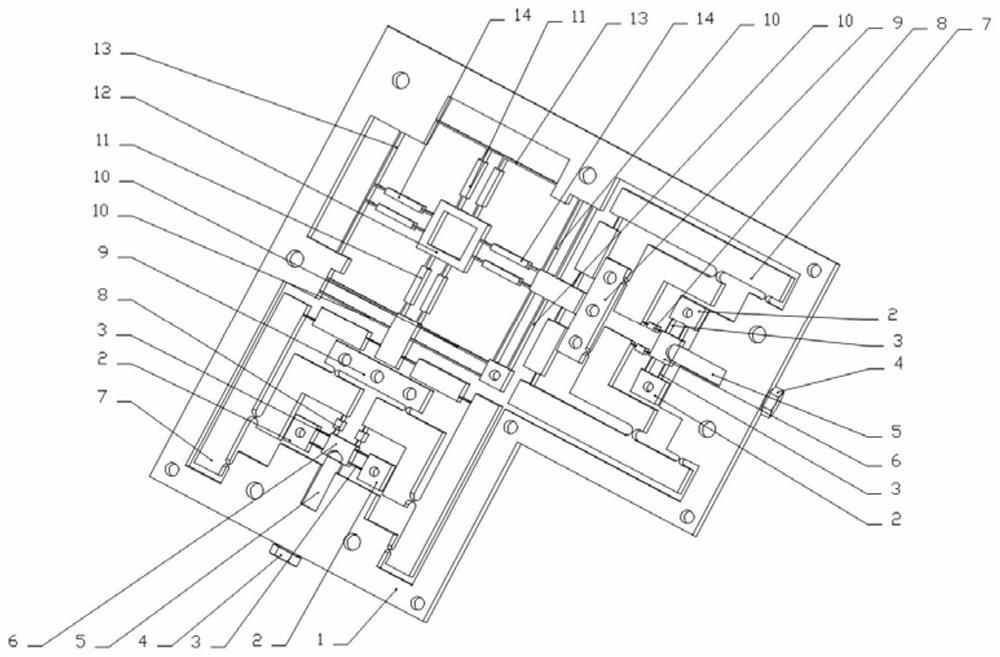
机构所设置的1-3号压电位置如图11所示,图12为另一视角三维视图,按照平面分割,得到上半部分机构如图13所示,4-7号压电驱动位置在图13中给出;图14-图19的有限元仿真单元类型采用solid 10node 187,弹性模量70MPa,泊松比0.3。
如图14所示,X向的运动有限元验证参数设置,向固定架施加全位移约束,向1号压电驱动点施加100N的集中载荷,输出块沿X向位移3um。
如图15所示,沿Y轴移动的有限元验证参数设置,向固定架施加全位移约束,分别向4、5号压电驱动面施加100N集中载荷6号压电驱动面施加130N集中载荷、7号压电驱动面施加70N集中载荷,观察Z向移动位移云图,得到的仿真结果,输出块沿Y向位移4.95um。
如图16所示,沿Z轴移动的有限元验证参数设置,向固定架施加全位移约束,向2、3号压电驱动点施加100N集中载荷,得到的仿真结果,输出块沿Z向位移6.98um,但是也同时发生存在一定的耦合情况。
如图17所示,绕X轴旋转的有限元验证参数设置,向固定架施加全位移约束,分别向4、5号压电驱动面施加100N集中载荷,得到的仿真结果,输出块绕X轴偏转11.87urad。
如图18所示,绕Y轴转动的有限元验证参数设置,向固定架施加全位移约束,向2号压电驱动点施加100N集中力,得到的仿真结果,输出块绕Y轴旋转12.15urad。
如图19所示,绕Z轴旋转的有限元验证参数设置,向固定架施加全位移约束,分别向5号压电驱动面施加100N集中载荷、6号压电驱动面施加130N集中载荷,得到的仿真结果,输出块绕Y轴偏转6.87urad。
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
一种基于柔性铰链的模块化六自由度精密微动机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0