

IPC分类号 : G07C1/20,G08G3/00,G08G3/02,G06Q50/06,H04L29/08





专利摘要
本实用新型公开的一种用于海上风电场的无人船巡检系统,属于海上风电运维技术领域。包括无人船终端、岸基基站和远程指挥中心;无人船终端包括控制系统、供电模块、动力系统、声呐成像巡检设备、运动检测模块和通讯模块,控制系统分别与供电模块、动力系统、声呐成像巡检设备、运动检测模块和通讯模块连接;无人船终端通过通讯模块与岸基基站通信互联,岸基基站与远程指挥中心通信互联。提高了船只的空间和能源使用效率,降低了船员的时间投入和风险投入,能够实现运检计划的智能调度管理,将现有的人工检测、定期维护和故障检修的“被动式运维”模式,提升为基于状态检修的“主动式运维”模式,极大地提升了巡检效率和经济效益。
权利要求
1.一种用于海上风电场的无人船巡检系统,其特征在于,包括无人船终端(1)、岸基基站(2)和远程指挥中心(3);
无人船终端(1)包括控制系统(1-1)、供电模块(1-2)、动力系统(1-3)、声呐成像巡检设备(1-4)、运动检测模块(1-5)和通讯模块(1-6),控制系统(1-1)分别与供电模块(1-2)、动力系统(1-3)、声呐成像巡检设备(1-4)、运动检测模块(1-5)和通讯模块(1-6)连接;无人船终端(1)通过通讯模块(1-6)与岸基基站(2)通信互联,岸基基站(2)与远程指挥中心(3)通信互联。
2.根据权利要求1所述的用于海上风电场的无人船巡检系统,其特征在于,通讯模块(1-6)包括北斗通信终端(1-6-1)和VHF数据通讯模块(1-6-2)。
3.根据权利要求2所述的用于海上风电场的无人船巡检系统,其特征在于,岸基基站(2)包括北斗通信模块(2-1)和VHF数据读取模块(2-2),北斗通信模块(2-1)与北斗通信终端(1-6-1)通信互联,VHF数据读取模块(2-2)与VHF数据通讯模块(1-6-2)通信互联。
4.根据权利要求1所述的用于海上风电场的无人船巡检系统,其特征在于,声呐成像巡检设备(1-4)为合成孔径声呐,声呐成像巡检设备(1-4)设在无人船终端(1)的船底。
5.根据权利要求1所述的用于海上风电场的无人船巡检系统,其特征在于,控制系统(1-1)包括自动防碰撞模块和无人船行驶路径控制模块。
6.根据权利要求1所述的用于海上风电场的无人船巡检系统,其特征在于,供电模块(1-2)包括大容量可充放锂电池组。
7.根据权利要求6所述的用于海上风电场的无人船巡检系统,其特征在于,供电模块(1-2)还包括光伏蓄能板,光伏蓄能板与大容量可充放锂电池组连接。
8.根据权利要求1所述的用于海上风电场的无人船巡检系统,其特征在于,运动检测模块(1-5)包括声学多普勒计程仪、光纤陀螺仪、北斗定位装置和激光雷达。
9.根据权利要求1所述的用于海上风电场的无人船巡检系统,其特征在于,远程指挥中心(3)包括无人船巡检计划安排模块(3-1)、无人船巡检路径动态规划模块(3-2)、海上风电健康监测模块(3-3)和大数据分析服务器(3-4)。
说明书
技术领域
本实用新型属于海上风电运维技术领域,具体涉及一种用于海上风电场的无人船巡检系统。
背景技术
当前,海上风电场的现有人工检测、定期维护和故障检修的“被动式运维”模式需人工出海、登机作业,周期长、成本高、安全风险大,存在关键设备的状态监测覆盖面不全、巡检设备智能化程度不高、故障诊断方法不完善、健康评估不准确等问题,不利于关键设备故障的及时发现与排除。
无人船可广泛应用于海洋运输、海洋环境调查、海洋资源探测、海洋考古、水上搜救、情报搜集、海事训练测试、侦察取证、警戒巡逻、火力打击、舰艇护航、反水雷和反潜等工作中。如何将无人船应用于海上风电场的运维工作是一个亟待解决的问题。
发明内容
为了解决上述现有技术中存在的缺陷,本实用新型的目的在于提供一种用于海上风电场的无人船巡检系统,能够实现运检计划的智能调度管理,初步实现基于状态检修的“主动式运维”模式,极大地提升了巡检效率和经济效益。
本实用新型通过以下技术方案来实现:
本实用新型公开了一种用于海上风电场的无人船巡检系统,包括无人船终端、岸基基站和远程指挥中心;
无人船终端包括控制系统、供电模块、动力系统、声呐成像巡检设备、运动检测模块和通讯模块,控制系统分别与供电模块、动力系统、声呐成像巡检设备、运动检测模块和通讯模块连接;无人船终端通过通讯模块与岸基基站通信互联,岸基基站与远程指挥中心通信互联。
优选地,通讯模块包括北斗通信终端和VHF数据通讯模块。
进一步优选地,岸基基站包括北斗通信模块和VHF数据读取模块,北斗通信模块与北斗通信终端通信互联,VHF数据读取模块与VHF数据通讯模块通信互联。
优选地,声呐成像巡检设备为合成孔径声呐,声呐成像巡检设备设在无人船终端的船底。
优选地,控制系统包括自动防碰撞模块和无人船行驶路径控制模块。
优选地,供电模块包括大容量可充放锂电池组。
进一步优选地,供电模块还包括光伏蓄能板,光伏蓄能板与大容量可充放锂电池组连接。
优选地,运动检测模块包括声学多普勒计程仪、光纤陀螺仪、北斗定位装置和激光雷达。
优选地,远程指挥中心包括无人船巡检计划安排模块、无人船巡检路径动态规划模块、海上风电健康监测模块和大数据分析服务器。
与现有技术相比,本实用新型具有以下有益的技术效果:
本实用新型公开的一种用于海上风电场的无人船巡检系统,针对海上风电场具有规模大、用海广、风机机组及升压站平台等海上平台间距离远的特点,无人船终端具备自主环境感知、路径规划、自主避障和自主控制能力,并能够完成相应的巡检任务。相较传统人工出海巡检,无人船巡检系统无需船员空间和设备,降低了船员有关的载重和用电负荷,大大提高了船只的空间和能源使用效率,为模块化应用提供了可行性;而且无人船终端具有较强的环境适应能力,能够在恶劣海况、尤其是黑夜中执行巡检任务,降低了船员的时间投入和风险投入,提高了无人船巡检系统的使用效率。无人船巡检系统结合目前海上风电场的状态监测系统,能够实现运检计划的智能调度管理,将现有的人工检测、定期维护和故障检修的“被动式运维”模式,提升为基于状态检修的“主动式运维”模式,极大地提升了巡检效率和经济效益。
进一步地,通讯模块包括北斗通信终端和VHF数据通讯模块,当无人船终端与岸基基站间的距离在VHF通讯传输距离内时,通过VHF数据通讯模块与岸基基站进行数据传输;当距离超过VHF通讯传输距离时,通过数据接口传输至北斗通信终端,封装成北斗短报文格式,发送给岸基基站,从而实现无人船终端与岸基基站间的不间断数据互通。
进一步地,声呐成像巡检设备采用合成孔径声呐,分辨率高,能够获得准确的数据信息。
进一步地,控制系统包括自动防碰撞模块和无人船行驶路径控制模块,能够确保无人船终端及时躲避障碍,保障行驶安全性。
进一步地,供电模块包括大容量可充放锂电池组,且能够通过光伏蓄能板进行充电,提高了无人船终端的续航能力,并充分利用了海面上的光伏资源。
进一步地,运动检测模块包括声学多普勒计程仪、光纤陀螺仪、北斗定位装置和激光雷达,能够提供无人船终端的详细数据。
附图说明
图1为本实用新型的用于海上风电场的无人船巡检系统构成示意图;
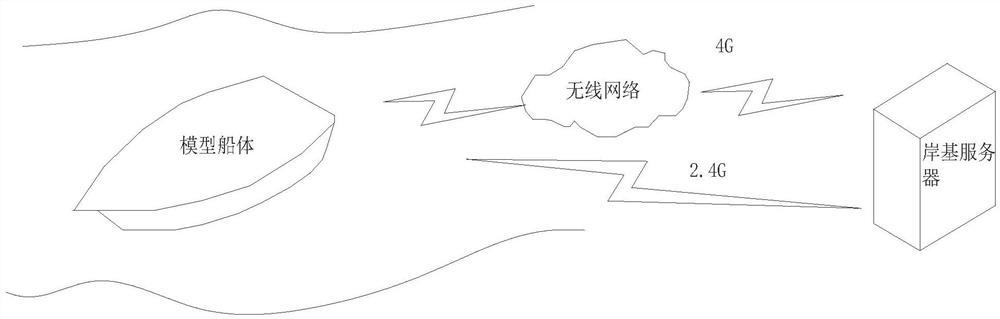
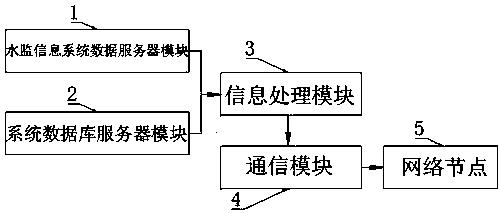
图2为本实用新型的无人船终端与岸基基站通讯方式示意图;
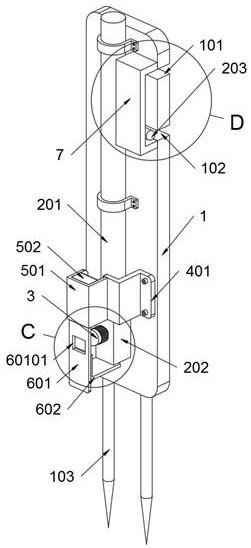
图3为本实用新型的用于海上风电场的无人船巡检系统的整体示意图。
图中:1-无人船终端,1-1-控制系统,1-2-供电模块,1-3-动力系统,1-4-声呐成像巡检设备,1-5-运动检测模块,1-6-通讯模块,1-6-1-北斗通信终端,1-6-2-VHF数据通讯模块,2-岸基基站,2-1-北斗通信模块,2-2-VHF数据读取模块,3-远程指挥中心,3-1-无人船巡检计划安排模块,3-2-无人船巡检路径动态规划模块,3-3-海上风电健康监测模块,3-4-大数据分析服务器。
具体实施方式
下面结合附图和具体实施例对本实用新型做进一步详细描述,其内容是对本实用新型的解释而不是限定:
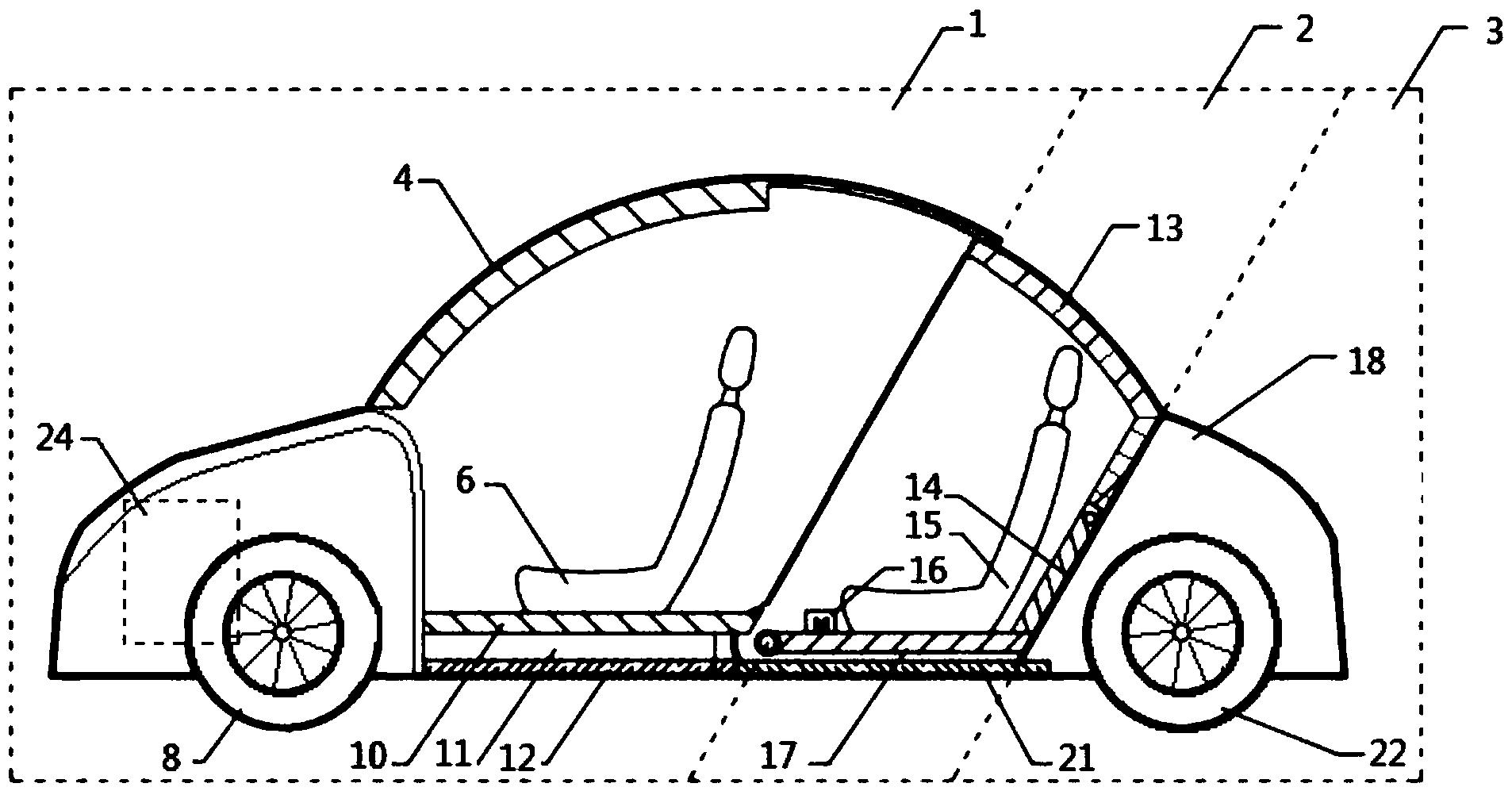
如图3,本实用新型的一种用于海上风电场的无人船巡检系统,包括无人船终端1、岸基基站2和远程指挥中心3;
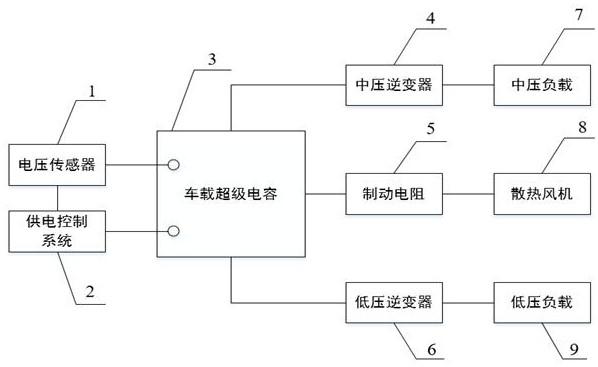
如图1,无人船终端1包括控制系统1-1、供电模块1-2、动力系统1-3、声呐成像巡检设备1-4、运动检测模块1-5和通讯模块1-6,控制系统1-1分别与供电模块1-2、动力系统1-3、声呐成像巡检设备1-4、运动检测模块1-5和通讯模块1-6连接。控制系统1-1包括自动防碰撞模块和无人船行驶路径控制模块。声呐成像巡检设备1-4为合成孔径声呐,声呐成像巡检设备1-4设在无人船终端1的船底。供电模块1-2包括大容量可充放锂电池组和光伏蓄能板,光伏蓄能板与大容量可充放锂电池组连接。运动检测模块1-5包括声学多普勒计程仪、光纤陀螺仪、北斗定位装置和激光雷达。远程指挥中心3包括无人船巡检计划安排模块3-1、无人船巡检路径动态规划模块3-2、海上风电健康监测模块3-3和大数据分析服务器3-4,能够对无人船终端1的动态资料和巡检信息进行综合处理分析,确定无人船终端1是否需要进行更详细探查巡检,进行无人船终端1巡检路径的自动动态规划更新,并通过岸基基站2传输控制指令给无人船终端1。
无人船终端1通过通讯模块1-6与岸基基站2通信互联,岸基基站2与远程指挥中心3通信互联;具体的,如图2,通讯模块1-6包括北斗通信终端1-6-1和VHF数据通讯模块1-6-2,岸基基站2包括北斗通信模块2-1和VHF数据读取模块2-2,北斗通信模块2-1与北斗通信终端1-6-1通信互联,VHF数据读取模块2-2与VHF数据通讯模块1-6-2通信互联。
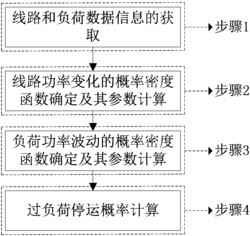
上述用于海上风电场的无人船巡检系统的工作方法,包括以下步骤:
S1.远程指挥中心3根据海缆、海上风机及升压站平台基础健康监测模块中的数据,确定执行日常巡检工作或专项巡检工作。若海缆、海上风机及升压站平台基础健康监测模块中无异常,下达日常巡检工作指令;若海缆、海上风机及升压站平台基础健康监测模块中出现海缆超温警报、或基础振动超限警报,则下达专项巡检工作指令。
S2.由远程指挥中心3通过岸基基站2下达巡检指令,停靠在港口的无人船终端1接收到岸基基站2传输的指令后,根据巡检指令中下达的巡检内容、巡检路径初步规划,离港执行巡检作业。以下以日常巡检工作实施流程为例进行详细介绍。
S3.对于日常巡检工作,无人船终端1首先行驶至海上风电场海缆登陆段出泥海域附近,启动声呐成像巡检设备1-4,开展大范围海域扫测,确定海缆的具体入泥位置,随后沿着海缆的走向,向海上风电场方向行驶,并同步开展海缆埋深的探查,主要探查海缆埋深是否满足海上风电场的埋深要求,以及是否存在海缆裸漏、悬空等情况。
S4.无人船终端1沿着海缆巡检至海上风电场后,根据确定一条经过升压站平台、所有海上风机的最短路线原则,进行海上风电场内巡检路线动态规划。
S5.在海上风电场内巡检时,主要针对海缆埋深、风机及升压站平台基础周围冲刷状态开展,无人船终端1需围绕风机及升压站基础一周,通过处理声呐成像巡检设备1-4的回波信号,获得基础周围的海底三维地貌,通过定期探查,确定基础周围的冲刷状态发展情况。
S6.无人船终端1动态信息由运动检测模块1-5生成,参见图2的无人船与岸基基站通讯方式,当无人船终端1与岸基基站2间的距离在无线通讯传输距离内时,通过VHF数据通讯模块发送给岸基基站2;当距离超过时,通过数据接口传输至无人船终端1的北斗通信终端1-6-1,封装成北斗短报文格式,发送给岸基基站2。
S7.在巡检过程中,若远程指挥中心3发现海缆存在裸漏或悬空、或风机及升压站平台基础周围冲刷坑发展过快等异常情况时,通过岸基基站2下达详查指令,由远程指挥中心3专家手动遥控无人船终端1搭载的巡检设备。
S8.在无人船终端1行驶过程中,通过搭载的激光雷达、自动防碰撞模块实现无人船终端1在水面上的自动避障功能,通过360°激光雷达探测无人船终端1在水面上的附近目标,根据无人船终端1的自身动态信息、激光雷达探测目标动态信息,确定无人船终端1的防碰撞行驶策略。
需要说明的是,以上所述仅为本实用新型实施方式之一,根据本实用新型所描述的系统所做的等效变化,均包括在本实用新型的保护范围内。本实用新型所属技术领域的技术人员可以对所描述的具体实例做类似的方式替代,只要不偏离本实用新型的结构或者超越本权利要求书所定义的范围,均属于本实用新型的保护范围。
一种用于海上风电场的无人船巡检系统专利购买费用说明
![]()
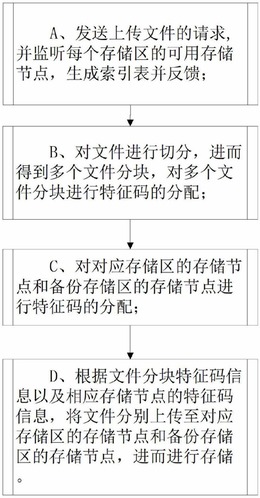
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0