







专利摘要
一种用于高超声速飞行器考核的仿真测试平台及控制方法,本发明涉及高超声速飞行器考核的仿真测试平台及控制方法。本发明的目的是为了解决目前高超声速飞行器的控制方法优劣性难以比较,而提供了一种用于高超声速飞行器考核的仿真测试平台及控制方法。一种用于高超声速飞行器考核的仿真测试平台主要包括:系统初始参数设置模块、六自由度非线性运动模型模块、数据图形输出模块和制导与控制算法模块四个部分;一种用于高超声速飞行器控制方法包括如下步骤:步骤一、主控软件的实现步骤;步骤二、性能评估软件的实现步骤;步骤三、离线仿真的实现步骤;本发明应用于高超声速飞行器领域。
权利要求
1.一种用于高超声速飞行器考核的仿真测试平台,其特征在于:
一种用于高超声速飞行器考核的仿真测试平台主要包括:系统初始参数设置模块、六自由度非线性运动模型模块、数据图形输出模块和制导与控制算法模块四个部分;
首先完成系统初始参数设置模块,然后制导与控制算法模块进入控制输入,系统初始参数设置模块与控制输入都进入六自由度非线性运动模型模块,然后进入数据图形输出模块,数据图形输出模块进入制导与控制算法模块然后进入控制输入再进入六自由度非线性运动模型模块;
所述的系统初始参数设置模块完成状态初值设置和各种拉偏条件设置;其中,所述各种拉偏条件设置包括:对气动参数摄动、大气密度摄动、大气温度摄动、风干扰或开关机干扰进行组合;
所述的六自由度非线性运动模型模块包括控制输入和输出,控制输入由制导与控制模块提供,包括三个舵偏角和燃油当量比,输出为系统的所有状态变量;
所述的数据图形输出模块其功能为将输出数据以图形方式显示;
所述的制导与控制算法模块中添加各种测试控制方法,输出只能是四个变量,按顺序分别为副翼偏角、方向舵偏角、升降舵偏角和燃油当量比,输入是六自由度非线性运动模型模块的输出;制导与控制算法模块采用Simulink中提供的S函数形式与仿真测试平台相连接,S函数由对应的m文件编写。
2.一种用于高超声速飞行器控制方法,其特征在于:一种用于高超声速飞行器控制方法包括如下步骤:
步骤一、主控软件的实现步骤;
优化轨迹提供基准弹道,选取飞行器模型,选取线性或非线性控制制导方法加入到制导与控制算法模块中,通过飞行器的实时飞行状态计算气动参数,将飞行器的飞行状态数据输出保存到文件中以备计算评估和图形显示;
步骤二、性能评估软件的实现步骤;
仿真评估基于设计的通用测试平台,进行六自由度仿真;
根据模型不确定性和干扰的极限情况,建立仿真情形库;针对选定的仿真情形,在相同的测试条件和评分标准下对不同的制导与控制方法进行仿真测试,并对仿真数据结果进行打分评估;
仿真评估中,各种的程序、所有仿真情形均采用相同的初始状态,仿真情形分为:
在标称情况下,不考虑各种不确定性和干扰,进行标称模型仿真;
在参数拉偏情形下,对不确定性、干扰和时延情况进行蒙特卡洛仿真,对控制系统性能、跟踪性能进行等评估标准进行加权求和,得出测试报告,评估各飞行器控制系统的优劣程度;
步骤三、离线仿真的实现步骤;
首先完成对状态初值、拉偏条件、弹道加载和制导与控制参数的设置完成系统初始化;
其中,所述状态初值设定即对系统初始状态进行赋值,完成对系统的初始状态输入;
所述拉偏条件设置是对气动参数摄动、大气密度摄动、大气温度摄动、风干扰大小、开关机干扰的大小进行设置;
所述制导与控制参数设置是加载弹道并设置制导与控制中的必要参数,添加制导与控制算法模块,根据Matlab命令窗口提示,运行Simulink仿真文件,保存数据结果。
3.根据权利要求2所述一种用于高超声速飞行器控制方法,其特征在于:步骤一中主控软件的实现步骤是基于Matlab/Simulink环境,通过选择需要的飞行器模型和制导与控制算法模块实现离线仿真,并实时监控仿真数据信息;
飞行器模型包括多种不同气动参数特性的飞行器模型,包括刚体模型,弹性体模型,大气环境参数模型,气动参数模型;
制导与控制仿真模型方法库包括多种方法模型,具体的有参数化方法,自抗扰方法,预测方法,以及舵机负载模型,能实现高超声速飞行器在不同飞行阶段的飞行仿真实验,充分验证各种控制方法对不同模型的适用性和控制性能。
4.根据权利要求3所述一种用于高超声速飞行器控制方法,其特征在于:步骤二中性能评估软件用于读取标称模型仿真与蒙特卡洛仿真提供的数据,通过与评估准则进行对比并显示评估结果;
仿真数据结果,用于Matlab离线仿真,便于仿真分析;性能评估数据用于查看不同控制方法的性能优劣;仿真数据经提取,根据需要行成的性能评估体系,对仿真数据进行评估计算,获得最终的评估结果。
说明书
技术领域
本发明涉及高超声速飞行器考核的仿真测试平台及控制方法。
背景技术
高超声速飞行器从控制角度来看,是一个快时变、强耦合、强非线性的受控对象,这就使得高超声速飞行器的控制方法优劣性难以比较。
发明内容
本发明的目的是为了解决目前高超声速飞行器的控制方法优劣性难以比较,而提供了一种用于高超声速飞行器考核的仿真测试平台及控制方法。
上述的发明目的是通过以下技术方案实现的:
一种用于高超声速飞行器考核的仿真测试平台主要包括:系统初始参数设置模块、六自由度非线性运动模型模块、数据图形输出模块和制导与控制算法模块四个部分;
首先完成系统初始参数设置模块,然后制导与控制算法模块进入控制输入,系统初始参数设置模块与控制输入都进入六自由度非线性运动模型模块,然后进入数据图形输出模块,数据图形输出模块进入制导与控制算法模块然后进入控制输入再进入六自由度非线性运动模型模块;
所述的系统初始参数设置模块完成状态初值设置和各种拉偏条件设置;其中,所述各种拉偏条件设置包括:对气动参数摄动、大气密度摄动、大气温度摄动、风干扰或开关机干扰进行组合;
所述的六自由度非线性运动模型模块包括控制输入和输出,控制输入由制导与控制模块提供,包括三个舵偏角和燃油当量比,输出为系统的所有状态变量;
所述的数据图形输出模块其功能为将输出数据以图形方式显示;
所述的制导与控制算法模块中添加各种测试控制方法,输出只能是四个变量,按顺序分别为副翼偏角、方向舵偏角、升降舵偏角和燃油当量比,输入是六自由度非线性运动模型模块的输出;制导与控制算法模块采用Simulink中提供的S函数形式与仿真测试平台相连接,S函数由对应的m文件编写,m文件为用matlab语言编写的程序。
一种用于高超声速飞行器控制方法包括如下步骤:
步骤一、主控软件的实现步骤;
优化轨迹提供基准弹道,选取飞行器模型,选取线性或非线性控制制导方法加入到制导与控制算法模块中,通过飞行器的实时飞行状态计算气动参数,将飞行器的飞行状态数据输出保存到文件中以备计算评估和图形显示;
步骤二、性能评估软件的实现步骤;
仿真评估基于设计的通用测试平台,进行六自由度仿真;
根据模型不确定性和干扰的极限情况,建立仿真情形库;针对选定的仿真情形,在相同的测试条件和评分标准下对不同的制导与控制方法进行仿真测试,并对仿真数据结果进行打分评估;
仿真评估中,各种的程序、所有仿真情形均采用相同的初始状态,为了更好地模拟实际飞行环境、考核控制算法的真实水平,仿真情形分为:
在标称情况下,不考虑各种不确定性和干扰,进行标称模型仿真;
在参数拉偏情形下,对不确定性、干扰和时延情况进行蒙特卡洛仿真,对控制系统性能、跟踪性能进行等评估标准进行加权求和,得出测试报告,评估各飞行器控制系统的优劣程度;
步骤三、离线仿真的实现步骤;
首先完成对状态初值、拉偏条件、弹道加载和制导与控制参数的设置完成系统初始化;
其中,所述状态初值设定即对系统初始状态进行赋值,完成对系统的初始状态输入;
所述拉偏条件设置是对气动参数摄动、大气密度摄动、大气温度摄动、风干扰大小、开关机干扰的大小进行设置;
所述制导与控制参数设置是加载弹道并设置制导与控制中的必要参数,添加制导与控制算法模块,根据matlab命令窗口提示,运行Simulink仿真文件,保存数据结果。
发明效果:
本仿真平台具有良好的通用性、扩展性和可靠性,对于不同控制方法之间的性能优劣比较,飞行控制系统的开发速度加快了18%,仿真的真实性和可信度提高了20%,可以为高超声速飞行器控制系统研究方法的效能评估提供一种可视化的软件支撑,为飞行控制系统开发节约了成本。基于Matlab/Simulink软件搭建了统一的用于高超声速飞行器考核的仿真测试平台,建立性能评估软件,弥补了高超声速飞行器控制方法性能评估的空白。
附图说明
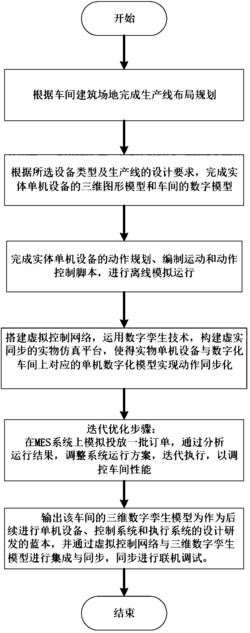
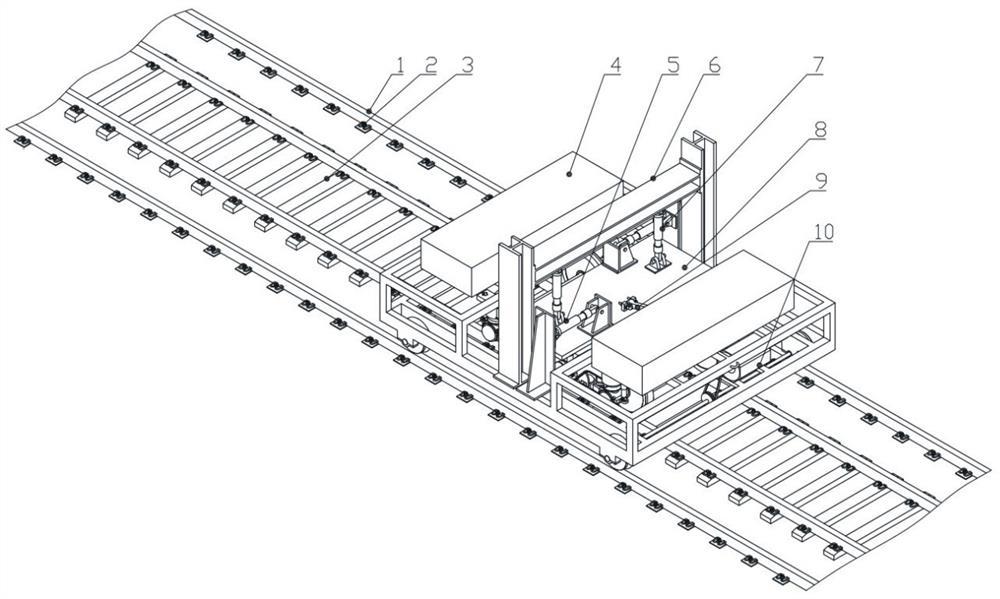
图1为具体实施方式一的测试平台示意图;
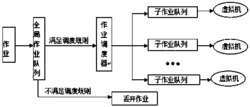
图2为具体实施方式一的测试平台效果图;
图3为具体实施方式二的方法流程图。
具体实施方式
具体实施方式一:本实施方式的一种用于高超声速飞行器仿真测试平台按以下步骤实现:
一种用于高超声速飞行器考核的仿真测试平台主要包括:系统初始参数设置模块、六自由度非线性运动模型模块、数据图形输出模块和制导与控制算法模块四个部分;
首先完成系统初始参数设置模块,然后制导与控制算法模块进入控制输入,系统初始参数设置模块与控制输入都进入六自由度非线性运动模型模块,然后进入数据图形输出模块,数据图形输出模块进入制导与控制算法模块然后进入控制输入在进入六自由度非线性运动模型模块;
所述的系统初始参数设置模块完成状态初值设置(m文件)和各种拉偏条件设置(m文件);其中,所述各种拉偏条件设置包括:对气动参数摄动、大气密度摄动、大气温度摄动、风干扰或开关机干扰进行组合,m文件为用matlab语言编写的程序;
所述的六自由度非线性运动模型模块包括控制输入和输出,控制输入由制导与控制模块提供,包括三个舵偏角和燃油当量比,输出为系统的所有状态变量;
所述的数据图形输出模块其功能为将输出数据以图形方式显示;
所述的制导与控制算法模块中添加各种测试控制方法,输出只能是四个变量,按顺序分别为副翼偏角、方向舵偏角、升降舵偏角和燃油当量比,输入是六自由度非线性运动模型模块的输出;制导与控制算法模块采用Simulink中提供的S函数形式与仿真测试平台相连接,S函数由对应的m文件编写。
具体实施方式二:一种用于高超声速飞行器控制方法按以下步骤实现:
步骤一、主控软件的实现步骤;
优化轨迹提供基准弹道,选取飞行器模型,选取线性或非线性控制制导方法加入到制导与控制算法模块中,通过飞行器的实时飞行状态计算气动参数,将飞行器的飞行状态数据输出保存到文件中以备计算评估和图形显示;
步骤二、性能评估软件的实现步骤;
仿真评估基于设计的通用测试平台,进行六自由度仿真;
根据模型不确定性和干扰的极限情况,建立仿真情形库;针对选定的仿真情形,在相同的测试条件和评分标准下对不同的制导与控制方法进行仿真测试,并对仿真数据结果进行打分评估;
仿真评估中,各种的程序、所有仿真情形均采用相同的初始状态,仿真情形分为:
在标称情况下,不考虑各种不确定性和干扰,进行标称模型仿真;
在参数拉偏情形下,对不确定性、干扰和时延情况进行蒙特卡洛仿真,对控制系统性能、跟踪性能进行等评估标准进行加权求和,得出测试报告,评估各飞行器控制系统的优劣程度;
步骤三、离线仿真的实现步骤;
首先完成对状态初值、拉偏条件、弹道加载和制导与控制参数的设置完成系统初始化;
其中,所述状态初值设定即对系统初始状态进行赋值,完成对系统的初始状态输入;
所述拉偏条件设置是对气动参数摄动、大气密度摄动、大气温度摄动、风干扰大小、开关机干扰的大小进行设置;
所述制导与控制参数设置是加载弹道并设置制导与控制中的必要参数,添加制导与控制算法模块,根据Matlab命令窗口提示,运行Simulink仿真文件,保存数据结果。
具体实施方式三:本实施方式与具体实施方式二不同的是:步骤一中主控软件的实现步骤是基于Matlab/Simulink环境,通过选择需要的飞行器模型和制导与控制算法模块实现离线仿真,并实时监控仿真数据信息;
飞行器模型包括多种不同气动参数特性的飞行器模型,包括刚体模型,弹性体模型,大气环境参数模型,气动参数模型;
制导与控制仿真模型方法库包括多种方法模型,具体的有参数化方法,自抗扰方法,预测方法,以及舵机负载模型,能实现高超声速飞行器在不同飞行阶段的飞行仿真实验,充分验证各种控制方法对不同模型和适用性和控制性能。
其它步骤及参数与具体实施方式二相同。
具体实施方式四:本实施方式与具体实施方式二或三之一不同的是:步骤二中性能评估软件用于读取标称模型仿真与蒙特卡洛仿真提供的数据,通过与评估准则进行对比并显示评估结果;
仿真数据结果,用于matlab离线仿真,便于仿真分析;性能评估数据用于查看不同控制方法的性能优劣;仿真数据经提取,根据需要行成的性能评估体系,对仿真数据进行评估计算,获得最终的评估结果。
其它步骤及参数与具体实施方式二或三之一相同。
仿真实验:
通过优化基准弹道得到飞行参考指令;选取制导与控制算法,如鲁棒方法,自适应方法,预测方法等;设置初始参数及仿真情形需要的参数值;大气参数和气动参数拉偏比例通过产生随机数来决定。随机数的选择按照正态分布求取,为便于采用统一的参数拉偏范围的随机数组,可以从通用的参数拉偏随机数数据库选取。确定飞行器仿真数据模型进行非线性六自由度仿真。根据仿真得到的数据,提取需要的指标值,通过已有的评估体系进行评价。
基于Matlab/Simulink软件建立了测试平台。此平台主要包括:系统初始参数设置模块、运动模型模块、数据输出模块和制导与控制算法模块四个部分。
系统初始参数设置模块:完成对状态初值、拉偏条件、弹道加载和制导控制参数的设置。下面具体介绍:
(1)状态初值设定:对系统初始状态进行赋值。调试时,需要先编写文件,即完成对系统的初始状态输入。测试时,系统的初始状态将统一设置,不必提供。
(2)拉偏条件设置:对气动参数摄动、大气密度摄动、大气温度摄动、风干扰大小、开关机干扰的大小进行设置。在调试时,可以参考技术要求对拉偏条件进行设置。测试时,各种拉偏条件将统一设置,不必提供。
(3)制导与控制参数设置:加载弹道并设置制导与控制中的必要参数。如果没有参数需要加载,此文件不需要修改。
一种用于高超声速飞行器考核的仿真测试平台及控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0