









专利摘要
本发明公开了一种基于地质数据的智能化工作面煤岩界面识别方法,包括步骤:一、基于地质数据的煤层三维建模:101、实测地质数据获取:获取待开采煤层的实测地质数据,实测地质数据包括煤层地质数据、回采巷道地质数据和切眼地质数据;102、煤层模型构建:数据存储、插值运算、三维坐标数据库生成和模型构建;二、煤层初步开采及煤岩界面识别;三、煤层后续开采及煤岩界面识别:采用采煤机由后向前对待开采煤层继续进行开采;每一个工作面开采之前,均先对该工作面的煤岩界面进行识别。本发明方法步骤简单、合计合理且实现方便、使用效果好,根据实测地质数据并结合滚筒调高轨迹预测数据,对煤岩界面进行简便、快速、准确识别。
权利要求
1.一种基于地质数据的智能化工作面煤岩界面识别方法,其特征在于,该方法包括以下步骤:
步骤一、基于地质数据的煤层三维建模,过程如下:
步骤101、实测地质数据获取:获取待开采煤层(1)的实测地质数据;所述待开采煤层(1)的实测地质数据包括煤层地质数据、回采巷道地质数据和切眼地质数据;
所述待开采煤层(1)的工作面为回采工作面,工作面运输巷(2)和工作面回风巷(3)之间通过切眼(4)连通;所述工作面运输巷(2)和工作面回风巷(3)呈平行布设且二者均与所述回采工作面的长度方向呈垂直布设,所述切眼(4)与所述回采工作面的长度方向呈平行布设;所述待开采煤层(1)分为运输巷区域煤层、回风巷区域煤层、切眼区域煤层和待开采区域煤层,所述运输巷区域煤层为待开采煤层(1)中位于工作面运输巷(2)所处区域的煤层,所述回风巷区域煤层为待开采煤层(1)中位于工作面回风巷(3)所处区域的煤层,所述切眼区域煤层为待开采煤层(1)中位于切眼(4)所处区域的煤层,所述待开采区域煤层为待开采煤层(1)中位于工作面运输巷(2)和工作面回风巷(3)之间的煤层;
所述回采巷道地质数据包括运输巷地质数据和回风巷地质数据;所述运输巷地质数据包括所述运输巷区域煤层顶部多个测点的三维坐标数据,所述回风巷地质数据包括所述回风巷区域煤层顶部多个测点的三维坐标数据;
所述切眼地质数据包括所述切眼区域煤层顶部多个测点的三维坐标数据;
所述煤层地质数据包括所述待开采区域煤层顶部多个测点的三维坐标数据;
步骤102、煤层模型构建:采用数据处理设备(6)建立待开采煤层(1)顶部的三维立体模型,过程如下:
步骤1021、数据存储:调用数据存储模块对步骤一中所述待开采煤层(1)的实测地质数据进行存储;
步骤1022、插值运算:根据步骤1021中所述待开采煤层(1)的实测地质数据中所有测点的三维坐标数据,调用插值运算模块计算得出待开采煤层(1)顶部多个位置点的三维坐标数据;
步骤1023、三维坐标数据库生成:调用数据库生成模块生成待开采煤层(1)顶部的三维坐标数据库;
所述三维坐标数据库内存储有步骤1021中所述待开采煤层(1)的实测地质数据中所有测点的三维坐标数据和步骤1022中计算得出的待开采煤层(1)顶部多个位置点的三维坐标数据;
步骤1024、模型构建:根据步骤1023中生成的待开采煤层(1)顶部的三维坐标数据库,调用三维建模软件建立待开采煤层(1)顶面的三维模型;
步骤二、煤层初步开采及煤岩界面识别:采用采煤机(7)且沿工作面推进方向由后向前对所述待开采煤层(1)进行开采,并完成所述待开采煤层(1)的前n个工作面的开采过程;其中,n为正整数且n=6~8;
采用采煤机(7)对待开采煤层(1)的任一个所述工作面进行开采之前,根据步骤一中所建立的待开采煤层(1)顶面的三维模型,对该工作面所处位置处待开采煤层(1)的煤岩界面进行识别;
采用采煤机(7)对待开采煤层(1)的任一个所述工作面进行开采时,根据该工作面所处位置处待开采煤层(1)的煤岩界面识别结果进行开采;采用采煤机(7)对任一个所述工作面进行割煤过程中,均采用数据处理设备(6)对m个截割位置处的滚筒截割姿态数据进行记录,获得该工作面开采过程中的采煤机调高数据组,并采用数据处理设备(6)将获得的所述采煤机调高数据组同步存储至预先建立的采煤机调高数据库内;所述采煤机调高数据库内按照开采先后顺序由前至后存储有待开采煤层(1)中当前已完成开采的所有工作面开采过程中的所述采煤机调高数据组;
所述采煤机调高数据组包括对所述待开采煤层(1)进行一刀割煤过程中m个截割位置处的滚筒截割姿态数据,其中m为正整数且m≥5;m个所述截割位置沿工作面长度方向由前至后进行排列;每个截割位置处的滚筒截割姿态数据均为该截割位置处采煤机(7)的截割滚筒(7-1)的三维坐标数据,所述截割滚筒(7-1)的三维坐标数据中Z轴坐标数据为滚筒高度数据;
步骤三、煤层后续开采及煤岩界面识别:采用采煤机(7)且沿工作面推进方向由后向前对所述待开采煤层(1)继续进行开采;
每一个所述工作面开采之前,均先对该工作面的煤岩界面进行识别,过程如下:
步骤301、识别用滚筒高度数据序列获取:采用数据处理设备(6)从所述采煤机调高数据库内获取当前工作面后侧的n个工作面开采过程中的所述采煤机调高数据组;所获取的n个所述采煤机调高数据组中的所述滚筒高度数据组成识别用滚筒高度数据序列,每个所述采煤机调高数据组中的所述滚筒高度数据均组成一个滚筒高度数据组;所述识别用滚筒高度数据序列中的n个所述滚筒高度数据组按照开采先后顺序由前至后排列,每个所述滚筒高度数据组中均包括m个截割位置处的所述滚筒高度数据;
所述识别用滚筒高度数据序列记作X(0);X(0)=(x(0)(1),x(0)(2),x(0)(3),...,x(0)(n)),其中x(0)(k)为所述识别用滚筒高度数据序列中的第k个所述滚筒高度数据组,其中k为正整数且k=1、2、3、…、n;x(0)(k)中的第h个所述滚筒高度数据记作x(0)(k,h),其中h为正整数且h=1、2、3、…、m;
步骤302、滚筒高度初步预测:采用数据处理设备(6)且调用灰色预测模型构建模块,对步骤301中所获取的所述识别用滚筒高度数据序列进行处理,建立灰色预测模型;再根据所建立的所述灰色预测模型,采用数据处理设备(6)处理得出所述待开采煤层(1)的n+1个所述工作面开采过程中的滚筒高度初步预测结果;
其中,第k'个所述工作面开采过程中的滚筒高度初步预测结果记作 k'为正整数且k'=1、2、3、…、n、n+1; 中包括m个滚筒高度初步预测值;
所得出的前n个所述工作面开采过程中的滚筒高度初步预测结果组成滚筒高度预测数据序列,所述滚筒高度预测数据序列中的n个所述滚筒高度初步预测结果按照开采先后顺序由前至后排列;所述滚筒高度预测数据序列记作 中的第k个所述滚筒高度初步预测结果记作 中的第h个所述滚筒高度初步预测值记作
第n+1个所述工作面开采过程中的滚筒高度初步预测结果记作 为采用采煤机(7)对当前工作面进行开采过程中的所述滚筒高度初步预测结果; 中的第h个所述滚筒高度初步预测值记作
步骤303、滚筒高度初步预测结果修正,过程如下:
步骤3031、建立预测残差的马尔可夫链:采用数据处理设备(6)且调用差值运算模块,对步骤301中所述识别用滚筒高度数据序列与步骤302中所述滚筒高度预测数据序列进行差值运算,得出预测残差的马尔可夫链;
所述预测残差的马尔可夫链,记作 为所述预测残差的马尔可夫链中的第k组预测残差, 中包括m个截割位置处的预测残差, 中第h个截割位置处的预测残差记作
步骤3032、马尔可夫预测:采用数据处理设备(6)且调用马尔科夫预测算法模块对步骤3031中所述预测残差的马尔可夫链进行处理,预测出所述预测残差的马尔可夫链中的第n+1组预测残差
中包括m个截割位置处的预测残差, 中第h个截割位置处的预测残差记作
步骤3033、滚筒高度预测数据组计算:根据步骤302中所述的 和步骤3032中所述的 采用数据处理设备(6)计算得出当前工作面开采过程中的滚筒高度预测数据组
中包括当前工作面开采过程中m个截割位置处的滚筒高度预测值, 中第h个截割位置处的滚筒高度预测值记作
步骤3034、采煤机调高预测数据组获取:根据步骤3033中所述的当前工作面开采过程中的滚筒高度预测数据组 并结合当前工作面开采过程中m个截割位置处截割滚筒(7-1)的平面位置信息,采用数据处理设备(6)得出当前工作面开采过程中的采煤机调高预测数据组,所述采煤机调高预测数据组中包括当前工作面开采过程中m个截割位置处的滚筒截割姿态预测数据;每个截割位置处的滚筒截割姿态预测数据均为预测出的该截割位置处的滚筒截割姿态数据;
步骤304、调高轨迹获取:所述数据处理设备(6)根据当前工作面开采过程中的所述采煤机调高预测数据组,获得当前工作面的滚筒调高轨迹;
步骤305、煤岩界面分界线输出:采用数据处理设备(6)输出当前工作面所处位置处待开采煤层(1)的煤岩界面分界线;当前工作面所处位置处待开采煤层(1)的煤岩界面分界线为步骤304中获得的当前工作面的滚筒调高轨迹;
步骤三中采用采煤机(7)对任一个所述工作面进行割煤过程中,均采用数据处理设备(6)对m个截割位置处的滚筒截割姿态数据进行记录,获得该工作面开采过程中的采煤机调高数据组,并采用数据处理设备(6)将获得的所述采煤机调高数据组同步存储至预先建立的采煤机调高数据库内。
2.按照权利要求1所述的基于地质数据的智能化工作面煤岩界面识别方法,其特征在于:步骤101中所述待开采区域煤层顶部的测点为巷间测点(1-1),多个所述巷间测点(1-1)分多排多列进行布设,相邻两排所述巷间测点(1-1)之间的间距和相邻两列所述巷间测点(1-1)之间的间距均为D1,其中D1=2.5m~3.5m;
步骤101中所述切眼区域煤层顶部的测点为切眼内测点(1-3),多个所述切眼内测点(1-3)分M1排和N1列进行布设,其中M1和N1均为正整数,M1≥2且N1≥2;相邻两排所述切眼内测点(1-3)之间的间距均为D2,其中D2=0.8m~1.2m;相邻两列所述切眼内测点(1-3)之间的间距均为D3,其中D3=1.2m~1.8m;
所述运输巷区域煤层顶部的多个测点与所述回风巷区域煤层顶部的多个测点呈对称布设;所述运输巷区域煤层顶部和所述回风巷区域煤层顶部的测点均为巷道内测点(1-2),所述工作面运输巷(2)分为运输巷主体段和位于所述运输巷主体段后侧的运输巷后部节段,所述工作面回风巷(3)分为回风巷主体段和位于所述回风巷主体段后侧的回风巷后部节段,所述运输巷后部节段和所述回风巷后部节段分别位于切眼(4)两侧,所述运输巷后部节段和所述回风巷后部节段的长度均与切眼(4)的宽度相同;所述运输巷主体段和所述回风巷主体段分别位于所述待开采区域煤层的左右两侧,所述运输巷主体段和所述回风巷主体段的长度均与所述待开采区域煤层的长度相同;所述切眼(4)位于所述待开采区域煤层后侧,切眼(4)的长度与所述待开采区域煤层的宽度相同;
所述运输巷区域煤层顶部的多个所述巷道内测点(1-2)分M2排和N2列进行布设,其中M2和N2均为正整数,M2≥2且N2≥2;所述运输巷主体段内相邻两排所述巷道内测点(1-2)之间的间距均为D4,其中D4=3.5m~4.5m;所述运输巷后部节段内相邻两排所述巷道内测点(1-2)之间的间距均为D2;相邻两列所述巷道内测点(1-2)之间的间距均为D5,其中D5=0.8m~1.2m。
3.按照权利要求1或2所述的基于地质数据的智能化工作面煤岩界面识别方法,其特征在于:步骤101中对所述待开采区域煤层顶部任一个所述测点的三维坐标数据进行获取时,采用由上至下向所述待开采区域煤层内钻孔的方法对该测点的竖向高度数据进行测量或从待开采煤层(1)的煤田地质勘探钻孔数据中获取所述待开采区域煤层顶部该测点的三维坐标数据;
步骤101中所述工作面运输巷(2)、工作面回风巷(3)和切眼(4)均为煤矿井下巷道,所述运输巷区域煤层顶部、所述回风巷区域煤层顶部和所述切眼区域煤层顶部的测点均为井下巷道测点;
对所述煤矿井下巷道内任一个所述井下巷道测点的三维坐标数据进行测量时,当该井下巷道测点的高度高于所处位置处煤矿井下巷道的顶部高度时,采用从所述煤矿井下巷道内部由下向上钻孔的方法,对该井下巷道测点的竖向高度数据进行测量;否则,当该井下巷道测点的高度低于所处位置处煤矿井下巷道的顶部高度或与所处位置处煤矿井下巷道的顶部高度相同时,采用高度测量设备对该井下巷道测点的竖向高度数据进行测量。
4.按照权利要求1或2所述的基于地质数据的智能化工作面煤岩界面识别方法,其特征在于:步骤二中对该工作面所处位置处待开采煤层(1)的煤岩界面进行识别时,先根据步骤一中所建立的待开采煤层(1)顶面的三维模型,对该工作面所处位置处待开采煤层(1)与顶板之间的分界线进行识别;再结合待开采煤层(1)的厚度,对该工作面所处位置处待开采煤层(1)与底板之间的分界线进行识别;
步骤二中该工作面所处位置处待开采煤层(1)的煤岩界面识别结果包括该工作面所处位置处待开采煤层(1)与顶板和底板之间的分界线。
5.按照权利要求4所述的基于地质数据的智能化工作面煤岩界面识别方法,其特征在于:步骤305中煤岩界面分界线输出后,还需判断是否需对所输出的煤岩界面分界线进行修正;
判断是否需对所输出的煤岩界面分界线进行修正时,先根据步骤一中所建立的待开采煤层(1)顶面的三维模型,对该工作面所处位置处待开采煤层(1)与顶板之间的分界线进行识别,所识别出的分界线为模型确定顶部分界线;再将所述模型确定顶部分界线与步骤305中所输出的该工作面所处位置处待开采煤层(1)与顶板之间的分界线进行对比,并根据对比结果判断是否需对步骤305中所输出的该工作面所处位置处待开采煤层(1)与顶板之间的分界线进行修正;当判断得出需进行修正时,根据所述模型确定顶部分界线对步骤305中所输出的该工作面所处位置处待开采煤层(1)与顶板之间的分界线进行修正;
同时,根据步骤一中所建立的待开采煤层(1)顶面的三维模型,并结合待开采煤层(1)的厚度,对该工作面所处位置处待开采煤层(1)与底板之间的分界线进行识别,所识别出的分界线为模型确定底部分界线;再将所述模型确定底部分界线与步骤305中所输出的该工作面所处位置处待开采煤层(1)与底板之间的分界线进行对比,并根据对比结果判断是否需对步骤305中所输出的该工作面所处位置处待开采煤层(1)与底板之间的分界线进行修正;当判断得出需进行修正时,根据所述模型确定底部分界线对步骤305中所输出的该工作面所处位置处待开采煤层(1)与底板之间的分界线进行修正。
6.按照权利要求4所述的基于地质数据的智能化工作面煤岩界面识别方法,其特征在于:步骤二和步骤三中所述的采煤机(7)均为双滚筒采煤机;所述双滚筒采煤机的两个所述截割滚筒(7-1)分别为对待开采煤层(1)的顶板下方煤层进行开采的上截割滚筒和对待开采煤层(1)的底板上方煤层进行开采的下截割滚筒;
步骤二中采用采煤机(7)对待开采煤层(1)的任一个所述工作面进行开采之前,先根据该工作面所处位置处待开采煤层(1)的煤岩界面识别结果,对该工作面开采过程中采煤机(7)的两个所述滚筒的调高轨迹分别进行确定;
步骤二中采用采煤机(7)对任一个所述工作面进行割煤过程中,均采用数据处理设备(6)对两个所述截割滚筒(7-1)在m个截割位置处的滚筒截割姿态数据分别进行记录,所获得的所述采煤机调高数据组的数量为两个,两个所述采煤机调高数据组分别为该工作面开采过程中两个所述截割滚筒(7-1)的所述采煤机调高数据组。
7.按照权利要求1或2所述的基于地质数据的智能化工作面煤岩界面识别方法,其特征在于:步骤二和步骤三中所述的采煤机(7)均为双滚筒采煤机;所述双滚筒采煤机的两个所述截割滚筒(7-1)分别为对待开采煤层(1)的顶板下方煤层进行开采的上截割滚筒和对待开采煤层(1)的底板上方煤层进行开采的下截割滚筒;
步骤三中采用采煤机(7)对任一个所述工作面进行割煤过程中,均采用数据处理设备(6)对两个所述截割滚筒(7-1)在m个截割位置处的滚筒截割姿态数据分别进行记录,所获得的所述采煤机调高数据组的数量为两个,两个所述采煤机调高数据组分别为该工作面开采过程中两个所述截割滚筒(7-1)的所述采煤机调高数据组;
步骤三中每一个所述工作面开采之前,对该工作面的煤岩界面进行识别时,先获得当前工作面开采过程中两个所述截割滚筒(7-1)的所述采煤机调高预测数据组;对当前工作面开采过程中任一个所述截割滚筒(7-1)的所述采煤机调高预测数据组进行获取时,均按照步骤301至步骤303中所述的方法进行获取;
步骤304中进行调高轨迹时,所述数据处理设备(6)根据当前工作面开采过程中两个所述截割滚筒(7-1)的所述采煤机调高预测数据组,分别获取两个所述截割滚筒(7-1)的当前工作面的滚筒调高轨迹;
步骤305中输出的当前工作面所处位置处待开采煤层(1)的煤岩界面分界线包括当前工作面所处位置处待开采煤层(1)与顶板和底板的分界线;其中,当前工作面所处位置处待开采煤层(1)与顶板的分界线为所述上截割滚筒的当前工作面的滚筒调高轨迹,当前工作面所处位置处待开采煤层(1)与底板的分界线为所述下截割滚筒的当前工作面的滚筒调高轨迹。
8.按照权利要求1或2所述的基于地质数据的智能化工作面煤岩界面识别方法,其特征在于:步骤二和步骤三中m个所述截割位置均按照工作面长度方向由后向前进行布设;
步骤302中所述灰色预测模型为无偏灰色预测模型;
步骤302中进行灰色预测模型建立之前,先根据步骤301中所述识别用滚筒高度数据序列,采用数据处理设备(6)获取m个所述截割位置的截割高度数据序列;每个所述截割位置的截割高度数据序列均包括n个所述滚筒高度数据,n个所述滚筒高度数据按照开采先后顺序由前至后进行排列;
其中,m个所述截割位置中第h个所述截割位置的截割高度数据序列记作 由所述识别用滚筒高度数据序列中n个所述滚筒高度数据组的第h个所述滚筒高度数据组成,
步骤302中处理得出的n+1个所述工作面开采过程中的滚筒高度初步预测结果由m个所述截割位置的截割高度初步预测结果组成;每个所述截割位置的截割高度初步预测结果均包括n+1个所述滚筒高度初步预测值,n+1个所述滚筒高度初步预测值按照开采先后顺序由前至后进行排列;
m个所述截割位置中第h个所述截割位置的截割高度初步预测结果记作
由m个所述截割位置的截割高度初步预测结果中第k'个所述滚筒高度初步预测值组成;
步骤302中进行滚筒高度初步预测时,采用数据处理设备(6)对m个所述截割位置的截割高度初步预测结果分别进行预测;m个所述截割位置的截割高度初步预测结果的预测方法均相同;
对m个所述截割位置中第h个所述截割位置的截割高度初步预测结果进行预测时,先采用数据处理设备(6)且调用灰色预测模型构建模块,对 进行处理,并根据处理结果建立无偏灰色预测模型,过程如下:
步骤3021、灰生成:调用灰生成算法模块,对 进行灰生成,获得 的生成数据序列x(1)(h);
其中,x(1)(h)=(x(1)(1,h),x(1)(2,h),x(1)(3,h),...,x(1)(n,h));所述生成数据序列x(1)(h)中包括n个生成数据,所述生成数据序列x(1)(h)中的第k个所述生成数据记作x(1)(k,h);
步骤3022、紧邻均值序列生成:调用紧邻均值序列生成模块,对步骤3021中所述生成数据序列 进行处理,生成所述生成数据序列 的紧邻均值序列Z(1)(h);其中Z(1)(h)=(z(1)(2,h),z(1)(3,h),...,z(1)(n,h));
所述紧邻均值序列Z(1)中包括n-1个紧邻均值,所述紧邻均值序列Z(1)中的第s-1个所述紧邻均值记作z(1)(s,h),z(1)(s,h)=0.5x(1)(s,h)+0.5x(1)(s-1,h);其中,x(1)(s,h)为所述生成数据序列x(1)(h)中的第s个所述生成数据,x(1)(s-1,h)为所述生成数据序列x(1)(h)中的第s-1个所述生成数据;其中,s为正整数且s=2、3、…、n;
步骤3023、无偏灰色预测模型的二级参数求解:调用二级参数求解模块,对所建立无偏灰色预测模型的四个二级参数C、D、E和F分别进行求解;
其中, x(0)(s,h)为 中的第s个所述滚筒高度数据;
步骤3024、无偏灰色预测模型的一级参数求解:根据步骤3023中求解出的所建立灰色预测模型的四个二级参数C、D、E和F,调用一级参数求解模块,对所建立灰色预测模型的两个一级参数a和b分别进行求解;
其中,
步骤3025、无偏灰色参数求解:根据步骤3024中求解出的所建立无偏灰色预测模型的两个一级参数a和b,调用无偏灰色参数求解模块,对所建立灰色预测模型的两个无偏灰色参数α和β分别进行求解;
其中,
步骤3026、无偏灰色预测模型建立:根据步骤3025中求解出的所建立无偏灰色预测模型的两个无偏灰色参数α和β,调用无偏灰色预测模型建立模块,建立无偏灰色预测模型;所建立的无偏灰色预测模型为: 其中,x(0)(1,h)为 中的第1个所述滚筒高度数据,k″为正整数且k″≥1;
步骤3026中建立所述无偏灰色预测模型后,采用数据处理设备(6)且根据所建立的所述无偏灰色预测模型,获得m个所述截割位置中第h个所述截割位置的截割高度初步预测结果 其中, 中的第g个所述滚筒高度初步预测值 g为正整数且g=1、2、3、…、n+1。
9.按照权利要求1或2所述的基于地质数据的智能化工作面煤岩界面识别方法,其特征在于:步骤3031中所述预测残差的马尔可夫链中包括m×h个所述预测残差;
步骤3032中采用数据处理设备(6)且调用马尔科夫预测算法模块对步骤3031中所述预测残差的马尔可夫链进行处理时,过程如下:
步骤30321、状态划分:根据步骤3031中所述预测残差的马尔可夫链中的m×h个所述预测残差,采用数据处理设备(6)对所述预测残差的状态进行划分,获得所述预测残差的J个状态;所述预测残差的J个状态中的第j个状态记作状态j,其中J为正整数且J≥3,j为正整数且j=1、…、J;
步骤30322、一步转移概率矩阵计算:根据步骤3031中所述预测残差的马尔可夫链中m×h个所述预测残差,采用数据处理设备(6)且调用一步转移概率矩阵模块,计算得出所述预测残差的一步转移概率矩阵;
所述一步转移概率矩阵为J阶方阵,所述一步转移概率矩阵中的第i行第j数据记作Pij,其中Pij为所述预测残差由状态i转移至状态j的转移概率;i为正整数且i=1、…、J;
步骤30323、马尔可夫预测:采用数据处理设备(6)对第n+1组预测残差 中m个截割位置处的预测残差分别进行预测,第n+1组预测残差 中m个截割位置处预测残差的预测方法均相同;
其中,对 中第h个截割位置处的预测残差 进行预测时,包括以下步骤:
步骤A1、根据步骤一中所述预测残差的马尔可夫链,获得第n组预测残差 中第h个截割位置处的预测残差
步骤A2、根据步骤30321中所述预测残差的J个状态划分结果,对步骤A1中所述预测残差 的状态进行判断,得出所述预测残差 的状态;
所述预测残差 的状态记作状态i',其中i'为正整数且i'=1、…、J;
步骤A3、根据步骤A2中判断得出的所述预测残差 的状态i',并结合步骤30322中所述一步转移概率矩阵,得出所述预测残差 的最大转移概率;
所述预测残差 的最大转移概率记作Pi'j',Pi'j'为所述一步转移概率矩阵中的第i'行第j'列数据,其中j'为正整数且j'=1、2、…、J;
步骤A4、根据步骤A3中得出的所述预测残差 的最大转移概率Pi'j',得出所述预测残差 的状态;
所述预测残差 的状态为状态j';
步骤A5、根据步骤A4中得出的所述预测残差 的状态j',并结合步骤30321中所述预测残差的J个状态划分结果,得出所述预测残差
10.按照权利要求9所述的基于地质数据的智能化工作面煤岩界面识别方法,其特征在于:步骤30321进行状态划分时,先找出m×h个所述预测残差中的最大值和最小值,所找出的最大值为预测残差最大值且其记作 所找出的最小值为预测残差最大值且其记作 再从区间 中选取J-1个数值,所选取的J-1个数值组成状态划分端点数据列,所述状态划分端点数据列中的J-1个数值按照数值从小到大的顺序由前至后进行排列,所述状态划分端点数据列中的第j″个数值记作 再利用所选取的J-1个数值将区间 划分为J个区间,划分好的J个区间为分别为所述预测残差的J个状态的状态区间;其中,j″为正整数且j″=1、2、…、J-1;
J个所述区间中的第j个区间为状态j的状态区间;状态j的状态区间的两个端点值分别记作 和 且 当j=1时, 当2≤j≤J时, 当j=J时, 当1≤j≤J-1时, 步骤30322中所述的 其中mj为m×h个所述预测残差中位于状态j的状态区间内的所有预测残差的总数量,mi为m×h个所述预测残差中位于状态i的状态区间内的所有预测残差的总数量;
步骤A2中对步骤A1中所述预测残差 的状态进行判断时,根据所述预测残差 所处的状态区间,对所述预测残差 的状态进行判断;所述预测残差 位于状态i'的状态区间内;
步骤A3中所述预测残差 的最大转移概率Pi'j'为所述一步转移概率矩阵的第i'行数据中数值最大的数据;
步骤A5中所述预测残差 其中 和 为状态j'的状态区间的两个端点值,且
说明书
技术领域
本发明属于煤层开采技术领域,尤其是涉及一种基于地质数据的智能化工作面煤岩界面识别方法。
背景技术
近年来煤矿企业加大科学技术方面的研发投入,有效推动矿井由数字化矿山向智能化矿山迈进。采煤无人值守已经是煤矿行业最为突出的一个课题。采用智能化工作面(也称为智能化综采工作面)对煤矿进行智能化开采,不仅仅是国家面临的问题,也是国际上面临的一个难关。煤岩界面识别问题是实现智能化工作面的关键问题之一,煤岩界面识别能使采煤机具有自动追踪煤岩界面的能力,有助于引导煤矿井下采煤自动化,提高生产效益。准确识别煤岩界面后,才能实现综采工作面采煤机调高的自动化和智能化控制,有效提高综采工作面的自动化水平。目前,对煤岩界面进行识别时,主要采用的是放射性探测技术、振动测试技术等对煤岩界面进行实际测试,费工费时,并且煤岩界面识别效果较差。
发明内容
本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种基于地质数据的智能化工作面煤岩界面识别方法,其方法步骤简单、合计合理且实现方便、使用效果好,根据实测地质数据并结合滚筒调高轨迹预测数据,对煤岩界面进行简便、快速、准确识别。
为解决上述技术问题,本发明采用的技术方案是:一种基于地质数据的智能化工作面煤岩界面识别方法,其特征在于,该方法包括以下步骤:
步骤一、基于地质数据的煤层三维建模,过程如下:
步骤101、实测地质数据获取:获取待开采煤层的实测地质数据;所述待开采煤层的实测地质数据包括煤层地质数据、回采巷道地质数据和切眼地质数据;
所述待开采煤层的工作面为回采工作面,工作面运输巷和工作面回风巷之间通过切眼连通;所述工作面运输巷和工作面回风巷呈平行布设且二者均与所述回采工作面的长度方向呈垂直布设,所述切眼与所述回采工作面的长度方向呈平行布设;所述待开采煤层分为运输巷区域煤层、回风巷区域煤层、切眼区域煤层和待开采区域煤层,所述运输巷区域煤层为待开采煤层中位于工作面运输巷所处区域的煤层,所述回风巷区域煤层为待开采煤层中位于工作面回风巷所处区域的煤层,所述切眼区域煤层为待开采煤层中位于切眼所处区域的煤层,所述待开采区域煤层为待开采煤层中位于工作面运输巷和工作面回风巷之间的煤层;
所述回采巷道地质数据包括运输巷地质数据和回风巷地质数据;所述运输巷地质数据包括所述运输巷区域煤层顶部多个测点的三维坐标数据,所述回风巷地质数据包括所述回风巷区域煤层顶部多个测点的三维坐标数据;
所述切眼地质数据包括所述切眼区域煤层顶部多个测点的三维坐标数据;
所述煤层地质数据包括所述待开采区域煤层顶部多个测点的三维坐标数据;
步骤102、煤层模型构建:采用数据处理设备建立待开采煤层顶部的三维立体模型,过程如下:
步骤1021、数据存储:调用数据存储模块对步骤一中所述待开采煤层的实测地质数据进行存储;
步骤1022、插值运算:根据步骤1021中所述待开采煤层的实测地质数据中所有测点的三维坐标数据,调用插值运算模块计算得出待开采煤层顶部多个位置点的三维坐标数据;
步骤1023、三维坐标数据库生成:调用数据库生成模块生成待开采煤层顶部的三维坐标数据库;
所述三维坐标数据库内存储有步骤1021中所述待开采煤层的实测地质数据中所有测点的三维坐标数据和步骤1022中计算得出的待开采煤层顶部多个位置点的三维坐标数据;
步骤1024、模型构建:根据步骤1023中生成的待开采煤层顶部的三维坐标数据库,调用三维建模软件建立待开采煤层顶面的三维模型;
步骤二、煤层初步开采及煤岩界面识别:采用采煤机且沿工作面推进方向由后向前对所述待开采煤层进行开采,并完成所述待开采煤层的前n个工作面的开采过程;其中,n为正整数且n=6~8;
采用采煤机对待开采煤层的任一个所述工作面进行开采之前,根据步骤一中所建立的待开采煤层顶面的三维模型,对该工作面所处位置处待开采煤层的煤岩界面进行识别;
采用采煤机对待开采煤层的任一个所述工作面进行开采时,根据该工作面所处位置处待开采煤层的煤岩界面识别结果进行开采;采用采煤机对任一个所述工作面进行割煤过程中,均采用数据处理设备对m个截割位置处的滚筒截割姿态数据进行记录,获得该工作面开采过程中的采煤机调高数据组,并采用数据处理设备将获得的所述采煤机调高数据组同步存储至预先建立的采煤机调高数据库内;所述采煤机调高数据库内按照开采先后顺序由前至后存储有待开采煤层中当前已完成开采的所有工作面开采过程中的所述采煤机调高数据组;
所述采煤机调高数据组包括对所述待开采煤层进行一刀割煤过程中m个截割位置处的滚筒截割姿态数据,其中m为正整数且m≥5;m个所述截割位置沿工作面长度方向由前至后进行排列;每个截割位置处的滚筒截割姿态数据均为该截割位置处采煤机的截割滚筒的三维坐标数据,所述截割滚筒的三维坐标数据中Z轴坐标数据为滚筒高度数据;
步骤三、煤层后续开采及煤岩界面识别:采用采煤机且沿工作面推进方向由后向前对所述待开采煤层继续进行开采;
每一个所述工作面开采之前,均先对该工作面的煤岩界面进行识别,过程如下:
步骤301、识别用滚筒高度数据序列获取:采用数据处理设备从所述采煤机调高数据库内获取当前工作面后侧的n个工作面开采过程中的所述采煤机调高数据组;所获取的n个所述采煤机调高数据组中的所述滚筒高度数据组成识别用滚筒高度数据序列,每个所述采煤机调高数据组中的所述滚筒高度数据均组成一个滚筒高度数据组;所述识别用滚筒高度数据序列中的n个所述滚筒高度数据组按照开采先后顺序由前至后排列,每个所述滚筒高度数据组中均包括m个截割位置处的所述滚筒高度数据;
所述识别用滚筒高度数据序列记作X(0);X(0)=(x(0)(1),x(0)(2),x(0)(3),...,x(0)(n)),其中x(0)(k)为所述识别用滚筒高度数据序列中的第k个所述滚筒高度数据组,其中k为正整数且k=1、2、3、…、n;x(0)(k)中的第h个所述滚筒高度数据记作x(0)(k,h),其中h为正整数且h=1、2、3、…、m;
步骤302、滚筒高度初步预测:采用数据处理设备且调用灰色预测模型构建模块,对步骤301中所获取的所述识别用滚筒高度数据序列进行处理,建立灰色预测模型;再根据所建立的所述灰色预测模型,采用数据处理设备处理得出所述待开采煤层的n+1个所述工作面开采过程中的滚筒高度初步预测结果;
其中,第k'个所述工作面开采过程中的滚筒高度初步预测结果记作 k'为正整数且k'=1、2、3、…、n、n+1; 中包括m个滚筒高度初步预测值;
所得出的前n个所述工作面开采过程中的滚筒高度初步预测结果组成滚筒高度预测数据序列,所述滚筒高度预测数据序列中的n个所述滚筒高度初步预测结果按照开采先后顺序由前至后排列;所述滚筒高度预测数据序列记作 中的第k个所述滚筒高度初步预测结果记作 中的第h个所述滚筒高度初步预测值记作
第n+1个所述工作面开采过程中的滚筒高度初步预测结果记作 为采用采煤机对当前工作面进行开采过程中的所述滚筒高度初步预测结果; 中的第h个所述滚筒高度初步预测值记作
步骤303、滚筒高度初步预测结果修正,过程如下:
步骤3031、建立预测残差的马尔可夫链:采用数据处理设备且调用差值运算模块,对步骤301中所述识别用滚筒高度数据序列与步骤302中所述滚筒高度预测数据序列进行差值运算,得出预测残差的马尔可夫链;
所述预测残差的马尔可夫链,记作 为所述预测残差的马尔可夫链中的第k组预测残差, 中包括m个截割位置处的预测残差, 中第h个截割位置处的预测残差记作
步骤3032、马尔可夫预测:采用数据处理设备且调用马尔科夫预测算法模块对步骤3031中所述预测残差的马尔可夫链进行处理,预测出所述预测残差的马尔可夫链中的第n+1组预测残差
中包括m个截割位置处的预测残差, 中第h个截割位置处的预测残差记作
步骤3033、滚筒高度预测数据组计算:根据步骤302中所述的 和步骤3032中所述的 采用数据处理设备计算得出当前工作面开采过程中的滚筒高度预测数据组
中包括当前工作面开采过程中m个截割位置处的滚筒高度预测值, 中第h个截割位置处的滚筒高度预测值记作
步骤3034、采煤机调高预测数据组获取:根据步骤3033中所述的当前工作面开采过程中的滚筒高度预测数据组 并结合当前工作面开采过程中m个截割位置处截割滚筒的平面位置信息,采用数据处理设备得出当前工作面开采过程中的采煤机调高预测数据组,所述采煤机调高预测数据组中包括当前工作面开采过程中m个截割位置处的滚筒截割姿态预测数据;每个截割位置处的滚筒截割姿态预测数据均为预测出的该截割位置处的滚筒截割姿态数据;
步骤304、调高轨迹获取:所述数据处理设备根据当前工作面开采过程中的所述采煤机调高预测数据组,获得当前工作面的滚筒调高轨迹;
步骤305、煤岩界面分界线输出:采用数据处理设备输出当前工作面所处位置处待开采煤层的煤岩界面分界线;当前工作面所处位置处待开采煤层的煤岩界面分界线为步骤304中获得的当前工作面的滚筒调高轨迹;
步骤三中采用采煤机对任一个所述工作面进行割煤过程中,均采用数据处理设备对m个截割位置处的滚筒截割姿态数据进行记录,获得该工作面开采过程中的采煤机调高数据组,并采用数据处理设备将获得的所述采煤机调高数据组同步存储至预先建立的采煤机调高数据库内。
上述基于地质数据的智能化工作面煤岩界面识别方法,其特征是:步骤101中所述待开采区域煤层顶部的测点为巷间测点,多个所述巷间测点分多排多列进行布设,相邻两排所述巷间测点之间的间距和相邻两列所述巷间测点之间的间距均为D1,其中D1=2.5m~3.5m;
步骤101中所述切眼区域煤层顶部的测点为切眼内测点,多个所述切眼内测点分M1排和N1列进行布设,其中M1和N1均为正整数,M1≥2且N1≥2;相邻两排所述切眼内测点之间的间距均为D2,其中D2=0.8m~1.2m;相邻两列所述切眼内测点之间的间距均为D3,其中D3=1.2m~1.8m;
所述运输巷区域煤层顶部的多个测点与所述回风巷区域煤层顶部的多个测点呈对称布设;所述运输巷区域煤层顶部和所述回风巷区域煤层顶部的测点均为巷道内测点,所述工作面运输巷分为运输巷主体段和位于所述运输巷主体段后侧的运输巷后部节段,所述工作面回风巷分为回风巷主体段和位于所述回风巷主体段后侧的回风巷后部节段,所述运输巷后部节段和所述回风巷后部节段分别位于切眼两侧,所述运输巷后部节段和所述回风巷后部节段的长度均与切眼的宽度相同;所述运输巷主体段和所述回风巷主体段分别位于所述待开采区域煤层的左右两侧,所述运输巷主体段和所述回风巷主体段的长度均与所述待开采区域煤层的长度相同;所述切眼位于所述待开采区域煤层后侧,切眼的长度与所述待开采区域煤层的宽度相同;
所述运输巷区域煤层顶部的多个所述巷道内测点分M2排和N2列进行布设,其中M2和N2均为正整数,M2≥2且N2≥2;所述运输巷主体段内相邻两排所述巷道内测点之间的间距均为D4,其中D4=3.5m~4.5m;所述运输巷后部节段内相邻两排所述巷道内测点之间的间距均为D2;相邻两列所述巷道内测点之间的间距均为D5,其中D5=0.8m~1.2m。
上述基于地质数据的智能化工作面煤岩界面识别方法,其特征是:步骤101中对所述待开采区域煤层顶部任一个所述测点的三维坐标数据进行获取时,采用由上至下向所述待开采区域煤层内钻孔的方法对该测点的竖向高度数据进行测量或从待开采煤层的煤田地质勘探钻孔数据中获取所述待开采区域煤层顶部该测点的三维坐标数据;
步骤101中所述工作面运输巷、工作面回风巷和切眼均为煤矿井下巷道,所述运输巷区域煤层顶部、所述回风巷区域煤层顶部和所述切眼区域煤层顶部的测点均为井下巷道测点;
对所述煤矿井下巷道内任一个所述井下巷道测点的三维坐标数据进行测量时,当该井下巷道测点的高度高于所处位置处煤矿井下巷道的顶部高度时,采用从所述煤矿井下巷道内部由下向上钻孔的方法,对该井下巷道测点的竖向高度数据进行测量;否则,当该井下巷道测点的高度低于所处位置处煤矿井下巷道的顶部高度或与所处位置处煤矿井下巷道的顶部高度相同时,采用高度测量设备对该井下巷道测点的竖向高度数据进行测量。
上述基于地质数据的智能化工作面煤岩界面识别方法,其特征是:步骤二中对该工作面所处位置处待开采煤层的煤岩界面进行识别时,先根据步骤一中所建立的待开采煤层顶面的三维模型,对该工作面所处位置处待开采煤层与顶板之间的分界线进行识别;再结合待开采煤层的厚度,对该工作面所处位置处待开采煤层与底板之间的分界线进行识别;
步骤二中该工作面所处位置处待开采煤层的煤岩界面识别结果包括该工作面所处位置处待开采煤层与顶板和底板之间的分界线。
上述基于地质数据的智能化工作面煤岩界面识别方法,其特征是:步骤305中煤岩界面分界线输出后,还需判断是否需对所输出的煤岩界面分界线进行修正;
判断是否需对所输出的煤岩界面分界线进行修正时,先根据步骤一中所建立的待开采煤层顶面的三维模型,对该工作面所处位置处待开采煤层与顶板之间的分界线进行识别,所识别出的分界线为模型确定顶部分界线;再将所述模型确定顶部分界线与步骤305中所输出的该工作面所处位置处待开采煤层与顶板之间的分界线进行对比,并根据对比结果判断是否需对步骤305中所输出的该工作面所处位置处待开采煤层与顶板之间的分界线进行修正;当判断得出需进行修正时,根据所述模型确定顶部分界线对步骤305中所输出的该工作面所处位置处待开采煤层与顶板之间的分界线进行修正;
同时,根据步骤一中所建立的待开采煤层顶面的三维模型,并结合待开采煤层的厚度,对该工作面所处位置处待开采煤层与底板之间的分界线进行识别,所识别出的分界线为模型确定底部分界线;再将所述模型确定底部分界线与步骤305中所输出的该工作面所处位置处待开采煤层与底板之间的分界线进行对比,并根据对比结果判断是否需对步骤305中所输出的该工作面所处位置处待开采煤层与底板之间的分界线进行修正;当判断得出需进行修正时,根据所述模型确定底部分界线对步骤305中所输出的该工作面所处位置处待开采煤层与底板之间的分界线进行修正。
上述基于地质数据的智能化工作面煤岩界面识别方法,其特征是:步骤二和步骤三中所述的采煤机均为双滚筒采煤机;所述双滚筒采煤机的两个所述截割滚筒分别为对待开采煤层的顶板下方煤层进行开采的上截割滚筒和对待开采煤层的底板上方煤层进行开采的下截割滚筒;
步骤二中采用采煤机对待开采煤层的任一个所述工作面进行开采之前,先根据该工作面所处位置处待开采煤层的煤岩界面识别结果,对该工作面开采过程中采煤机的两个所述滚筒的调高轨迹分别进行确定;
步骤二中采用采煤机对任一个所述工作面进行割煤过程中,均采用数据处理设备对两个所述截割滚筒在m个截割位置处的滚筒截割姿态数据分别进行记录,所获得的所述采煤机调高数据组的数量为两个,两个所述采煤机调高数据组分别为该工作面开采过程中两个所述截割滚筒的所述采煤机调高数据组。
上述基于地质数据的智能化工作面煤岩界面识别方法,其特征是:步骤二和步骤三中所述的采煤机均为双滚筒采煤机;所述双滚筒采煤机的两个所述截割滚筒分别为对待开采煤层的顶板下方煤层进行开采的上截割滚筒和对待开采煤层的底板上方煤层进行开采的下截割滚筒;
步骤三中采用采煤机对任一个所述工作面进行割煤过程中,均采用数据处理设备对两个所述截割滚筒在m个截割位置处的滚筒截割姿态数据分别进行记录,所获得的所述采煤机调高数据组的数量为两个,两个所述采煤机调高数据组分别为该工作面开采过程中两个所述截割滚筒的所述采煤机调高数据组;
步骤三中每一个所述工作面开采之前,对该工作面的煤岩界面进行识别时,先获得当前工作面开采过程中两个所述截割滚筒的所述采煤机调高预测数据组;对当前工作面开采过程中任一个所述截割滚筒的所述采煤机调高预测数据组进行获取时,均按照步骤301至步骤303中所述的方法进行获取;
步骤304中进行调高轨迹时,所述数据处理设备根据当前工作面开采过程中两个所述截割滚筒的所述采煤机调高预测数据组,分别获取两个所述截割滚筒的当前工作面的滚筒调高轨迹;
步骤305中输出的当前工作面所处位置处待开采煤层的煤岩界面分界线包括当前工作面所处位置处待开采煤层与顶板和底板的分界线;其中,当前工作面所处位置处待开采煤层与顶板的分界线为所述上截割滚筒的当前工作面的滚筒调高轨迹,当前工作面所处位置处待开采煤层与底板的分界线为所述下截割滚筒的当前工作面的滚筒调高轨迹。
上述基于地质数据的智能化工作面煤岩界面识别方法,其特征是:步骤二和步骤三中m个所述截割位置均按照工作面长度方向由后向前进行布设;
步骤302中所述灰色预测模型为无偏灰色预测模型;
步骤302中进行灰色预测模型建立之前,先根据步骤301中所述识别用滚筒高度数据序列,采用数据处理设备获取m个所述截割位置的截割高度数据序列;每个所述截割位置的截割高度数据序列均包括n个所述滚筒高度数据,n个所述滚筒高度数据按照开采先后顺序由前至后进行排列;
其中,m个所述截割位置中第h个所述截割位置的截割高度数据序列记作 由所述识别用滚筒高度数据序列中n个所述滚筒高度数据组的第h个所述滚筒高度数据组成,
步骤302中处理得出的n+1个所述工作面开采过程中的滚筒高度初步预测结果由m个所述截割位置的截割高度初步预测结果组成;每个所述截割位置的截割高度初步预测结果均包括n+1个所述滚筒高度初步预测值,n+1个所述滚筒高度初步预测值按照开采先后顺序由前至后进行排列;
m个所述截割位置中第h个所述截割位置的截割高度初步预测结果记作
由m个所述截割位置的截割高度初步预测结果中第k'个所述滚筒高度初步预测值组成;
步骤302中进行滚筒高度初步预测时,采用数据处理设备对m个所述截割位置的截割高度初步预测结果分别进行预测;m个所述截割位置的截割高度初步预测结果的预测方法均相同;
对m个所述截割位置中第h个所述截割位置的截割高度初步预测结果进行预测时,先采用数据处理设备且调用灰色预测模型构建模块,对 进行处理,并根据处理结果建立无偏灰色预测模型,过程如下:
步骤3021、灰生成:调用灰生成算法模块,对 进行灰生成,获得 的生成数据序列x(1)(h);
其中,x(1)(h)=(x(1)(1,h),x(1)(2,h),x(1)(3,h),...,x(1)(n,h));所述生成数据序列x(1)(h)中包括n个生成数据,所述生成数据序列x(1)(h)中的第k个所述生成数据记作x(1)(k,h);
步骤3022、紧邻均值序列生成:调用紧邻均值序列生成模块,对步骤3021中所述生成数据序列 进行处理,生成所述生成数据序列 的紧邻均值序列Z(1)(h);其中Z(1)(h)=(z(1)(2,h),z(1)(3,h),...,z(1)(n,h));
所述紧邻均值序列Z(1)中包括n-1个紧邻均值,所述紧邻均值序列Z(1)中的第s-1个所述紧邻均值记作z(1)(s,h),z(1)(s,h)=0.5x(1)(s,h)+0.5x(1)(s-1,h);其中,x(1)(s,h)为所述生成数据序列x(1)(h)中的第s个所述生成数据,x(1)(s-1,h)为所述生成数据序列x(1)(h)中的第s-1个所述生成数据;其中,s为正整数且s=2、3、…、n;
步骤3023、无偏灰色预测模型的二级参数求解:调用二级参数求解模块,对所建立无偏灰色预测模型的四个二级参数C、D、E和F分别进行求解;
其中, x(0)(s,h)为 中的第s个所述滚筒高度数据;
步骤3024、无偏灰色预测模型的一级参数求解:根据步骤3023中求解出的所建立灰色预测模型的四个二级参数C、D、E和F,调用一级参数求解模块,对所建立灰色预测模型的两个一级参数a和b分别进行求解;
其中,
步骤3025、无偏灰色参数求解:根据步骤3024中求解出的所建立无偏灰色预测模型的两个一级参数a和b,调用无偏灰色参数求解模块,对所建立灰色预测模型的两个无偏灰色参数α和β分别进行求解;
其中,
步骤3026、无偏灰色预测模型建立:根据步骤3025中求解出的所建立无偏灰色预测模型的两个无偏灰色参数α和β,调用无偏灰色预测模型建立模块,建立无偏灰色预测模型;所建立的无偏灰色预测模型为: 其中,x(0)(1,h)为 中的第1个所述滚筒高度数据,k”为正整数且k”≥1;
步骤3026中建立所述无偏灰色预测模型后,采用数据处理设备且根据所建立的所述无偏灰色预测模型,获得m个所述截割位置中第h个所述截割位置的截割高度初步预测结果 其中, 中的第g个所述滚筒高度初步预测值 g为正整数且g=1、2、3、…、n+1。
上述基于地质数据的智能化工作面煤岩界面识别方法,其特征是:步骤3031中所述预测残差的马尔可夫链中包括m×h个所述预测残差;
步骤3032中采用数据处理设备且调用马尔科夫预测算法模块对步骤3031中所述预测残差的马尔可夫链进行处理时,过程如下:
步骤30321、状态划分:根据步骤3031中所述预测残差的马尔可夫链中的m×h个所述预测残差,采用数据处理设备对所述预测残差的状态进行划分,获得所述预测残差的J个状态;所述预测残差的J个状态中的第j个状态记作状态j,其中J为正整数且J≥3,j为正整数且j=1、…、J;
步骤30322、一步转移概率矩阵计算:根据步骤3031中所述预测残差的马尔可夫链中m×h个所述预测残差,采用数据处理设备且调用一步转移概率矩阵模块,计算得出所述预测残差的一步转移概率矩阵;
所述一步转移概率矩阵为J阶方阵,所述一步转移概率矩阵中的第i行第j数据记作Pij,其中Pij为所述预测残差由状态i转移至状态j的转移概率;i为正整数且i=1、…、J;
步骤30323、马尔可夫预测:采用数据处理设备对第n+1组预测残差 中m个截割位置处的预测残差分别进行预测,第n+1组预测残差 中m个截割位置处预测残差的预测方法均相同;
其中,对 中第h个截割位置处的预测残差 进行预测时,包括以下步骤:
步骤A1、根据步骤一中所述预测残差的马尔可夫链,获得第n组预测残差 中第h个截割位置处的预测残差
步骤A2、根据步骤30321中所述预测残差的J个状态划分结果,对步骤A1中所述预测残差 的状态进行判断,得出所述预测残差 的状态;
所述预测残差 的状态记作状态i',其中i'为正整数且i'=1、…、J;
步骤A3、根据步骤A2中判断得出的所述预测残差 的状态i',并结合步骤30322中所述一步转移概率矩阵,得出所述预测残差 的最大转移概率;
所述预测残差 的最大转移概率记作Pi'j',Pi'j'为所述一步转移概率矩阵中的第i'行第j'列数据,其中j'为正整数且j'=1、2、…、J;
步骤A4、根据步骤A3中得出的所述预测残差 的最大转移概率Pi'j',得出所述预测残差 的状态;
所述预测残差 的状态为状态j';
步骤A5、根据步骤A4中得出的所述预测残差 的状态j',并结合步骤30321中所述预测残差的J个状态划分结果,得出所述预测残差
上述基于地质数据的智能化工作面煤岩界面识别方法,其特征是:步骤30321进行状态划分时,先找出m×h个所述预测残差中的最大值和最小值,所找出的最大值为预测残差最大值且其记作 所找出的最小值为预测残差最大值且其记作 再从区间 中选取J-1个数值,所选取的J-1个数值组成状态划分端点数据列,所述状态划分端点数据列中的J-1个数值按照数值从小到大的顺序由前至后进行排列,所述状态划分端点数据列中的第j”个数值记作 再利用所选取的J-1个数值将区间 划分为J个区间,划分好的J个区间为分别为所述预测残差的J个状态的状态区间;其中,j”为正整数且j”=1、2、…、J-1;
J个所述区间中的第j个区间为状态j的状态区间;状态j的状态区间的两个端点值分别记作 和 且 当j=1时, 当2≤j≤J时, 当j=J时, 当1≤j≤J-1时,
步骤30322中所述的 其中mj为m×h个所述预测残差中位于状态j的状态区间内的所有预测残差的总数量,mi为m×h个所述预测残差中位于状态i的状态区间内的所有预测残差的总数量;
步骤A2中对步骤A1中所述预测残差 的状态进行判断时,根据所述预测残差 所处的状态区间,对所述预测残差 的状态进行判断;所述预测残差 位于状态i'的状态区间内;
步骤A3中所述预测残差 的最大转移概率Pi'j'为所述一步转移概率矩阵的第i'行数据中数值最大的数据;
步骤A5中所述预测残差 其中 和 为状态j'的状态区间的两个端点值,且
本发明与现有技术相比具有以下优点:
1、方法步骤简单、设计合理且实现方便,投入成本较低。
2、所采用的基于地质数据的煤层三维建模方法步骤简单、设计合理且实现简便、使用效果好,所采用的实测地质数据获取方法简单且所获取的实测地质数据准确,待开采煤层的实测地质数据包括煤层地质数据、回采巷道地质数据和切眼地质数据。并且,实测位置点的三维坐标数据为实测数据,插值处理后,获得待开采煤层顶部的三维坐标数据库,相应所建立的待开采煤层顶面的三维模型准确和可靠。
3、所采用的基于地质数据的煤层三维建模方法实现简便,能在短时间内快速建立待开采煤层顶面的三维模型,并能有效保证所建立三维模型的准确性和可靠性。
4、所采用的基于地质数据的煤层三维建模方法使用效果好且实用价值高,规避了长期以来难以解决的煤岩界面识别世界性难题,是一种全新的数字化控制采煤机自动割煤方法的重要数据基础;利用已经构建的煤层顶部三维模型,按照截割深度获取相应煤层数据,作为控制采煤机自动调高的依据,具有准确、便捷、可靠等优点。并且,改变了记忆截割方法煤层数据未知、仅仅依赖已经截割煤层数据调整采煤机高度的不足,避免了单纯依赖记忆截割引起的累计误差大、适应性差等弊端。采用该煤层三维建模方法有利于在割煤过程中,充分利用已经截割的煤层三维坐标数据,实时修正煤层顶面三维模型,进一步提高煤层顶面模型精度。因而,采用本发明能有效实现煤炭开采的数字化、自动化和智能化,提出一种基于较少的实测地质数据构建数字化煤层的方法,尤其适用于煤层起伏较大的薄煤层的开采过程,为采煤机自动割煤提供了基础数据,为实现煤炭开采的自动化和智能化奠定了坚实的基础,是一种解决煤岩识别问题的有效途径,能简便、快速获得工作面煤层的三维建模过程,所获得煤层顶面的三维模型准确,为综采工作面自动化、智能化提供煤层数据,并能为综采工作面采煤机滚筒的高度调整提供可靠依据。
5、所采用的调高轨迹预测方法步骤简单、设计合理且实现简便,投入成本低,根据预测出的调高轨迹对各工作面的煤岩界面进行识别,能有效确保煤岩界面识别精度。
6、调高轨迹预测时采用实时更新的识别用滚筒高度数据序列进行预测,既使运算速度得到提高,增强了预测的时效性,又能够保证采煤机调高轨迹预测用原始数据序列的动态更新和预测精度。
7、所采用的调高轨迹预测方法设计合理且实现方便,包括基于地质数据的煤层三维建模、煤层初步开采及滚筒截割姿态数据记录和煤层后续开采及调高轨迹预测三个步骤,其中对任一个工作面的采煤机调高轨迹进行预测时,过程如下:识别用滚筒高度数据序列获取、滚筒高度初步预测、滚筒高度初步预测结果修正和调高轨迹获取。
8、所采用的调高轨迹预测方法运算速度快,预测时间小于2s。
9、所采用调高轨迹预测方法的预测精度高,因而能有效保证煤岩界面准确识别,先基于灰色预测模型获取滚筒高度初步预测结果,再采用马尔可夫链模型对滚筒高度初步预测结果进行修正,能有效保证预测精度。采用马尔可夫链模型对滚筒高度初步预测结果进行修正时,采用基于预测残差的修正方法,设计合理且修正结果准确。
6、所采用的煤岩界面识别方法使用效果好且实用价值高,采用基于灰色马尔科夫链预测模型进行预测,灰色理论的研究对象主要是不确定性系统,以“少量信息明确、大量信息不明确”的“小样本”和“不确定”为特点,十分适合用于缺乏数据的采煤机调高轨迹预测,但是其预测是基于指数的预测,对随机波动序列预测效果较差,需要马尔科夫链模型来对其进行修正,两者实现良好的互补性;再根据预测出的调高轨迹对当前工作面所处位置处的煤岩界面进行简便、快速且准确识别。采用本发明充分利用灰色预测理论和马尔科夫链各自的优点和互补性,达到更高的预测精度。为了动态修正三维煤层数据,提高调高轨迹精度,基于滑动窗口进行预测,具有预测精度高、运算速度快等特点。首先,获取识别用滚筒高度数据序列,并利用实时获取的识别用滚筒高度数据序列预测出采煤机下一刀的调高轨迹,并且随着工作面的推进不断根据识别用滚筒高度数据序列进行预测,能够适应工业现场要求,便于推广使用。并且,根据实时获取的识别用滚筒高度数据序列进行轨迹预测,能有效减少运算处理的数据量,提高预测精度和速度。同时,利用无偏灰色模型的无偏灰色参数进行初步预测,与传统灰色参数建立预测模型存在本质区别,具有预测精度高、预测速度快等优点。同时,采用马尔可夫链模型对滚筒高度初步预测结果进行修正时,基于期望值(即预测残差的期望值)进行修正,修正结果更准确。
综上所述,本发明方法步骤简单、合计合理且实现方便、使用效果好,根据实测地质数据并结合滚筒调高轨迹预测数据,对煤岩界面进行简便、快速、准确识别。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
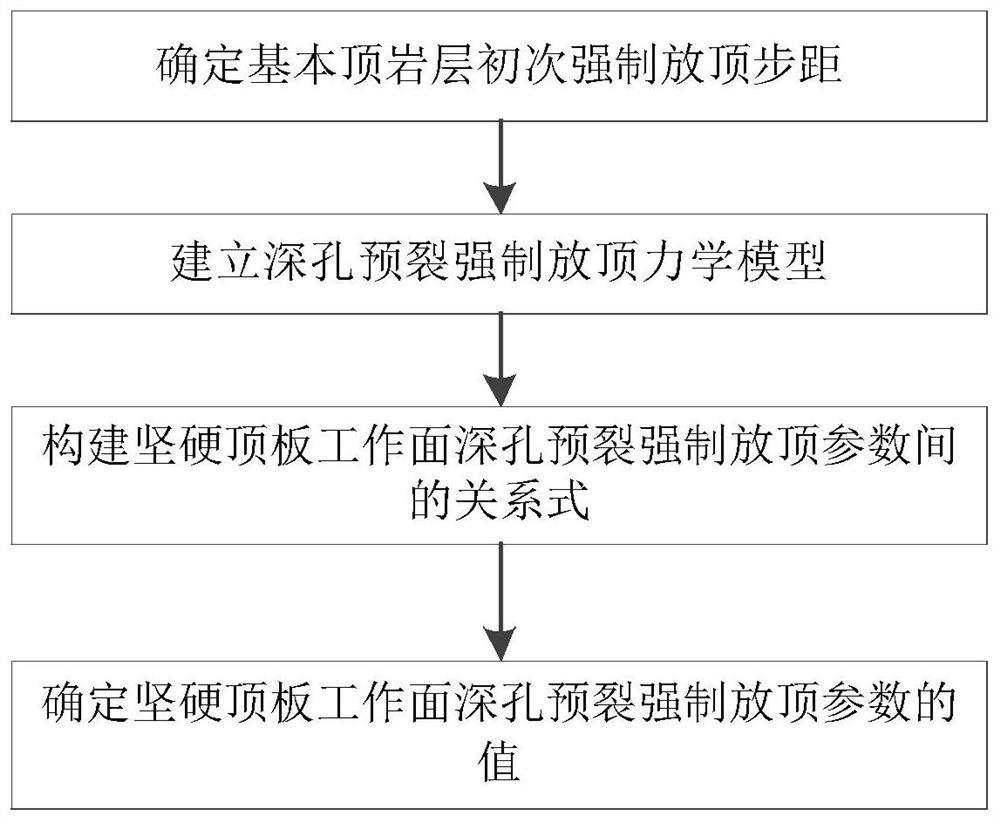
图1为本发明的方法流程框图。
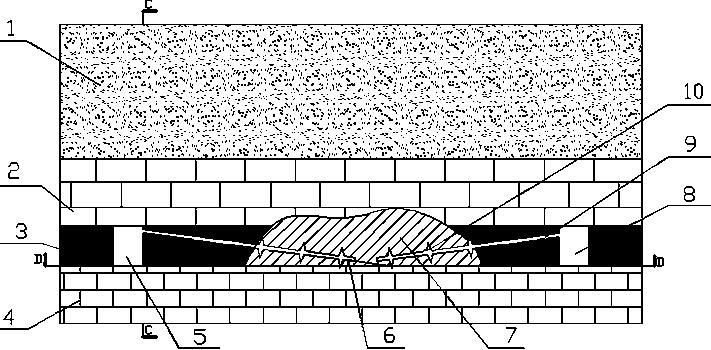
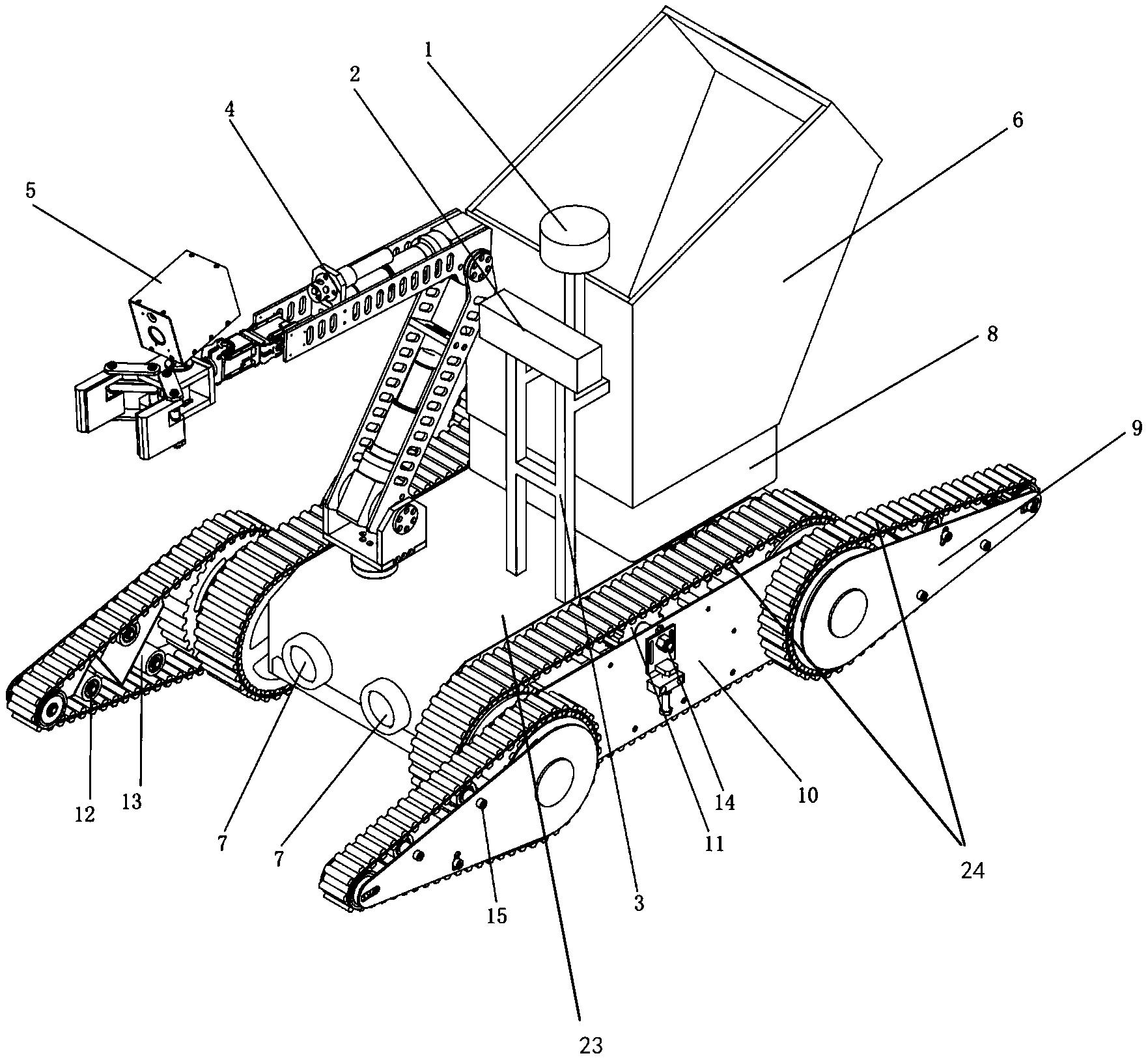
图2为本发明所建立煤层顶面三维模型的结构示意图。
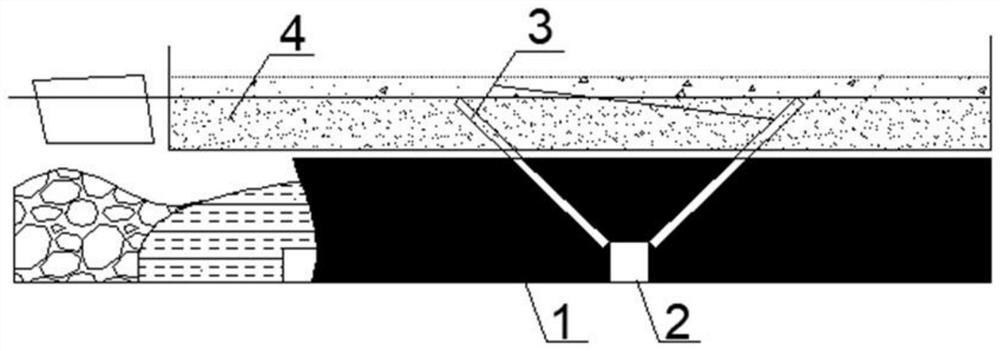
图3为本发明巷间测点、切眼内测点和巷道内测点的布设位置示意图。
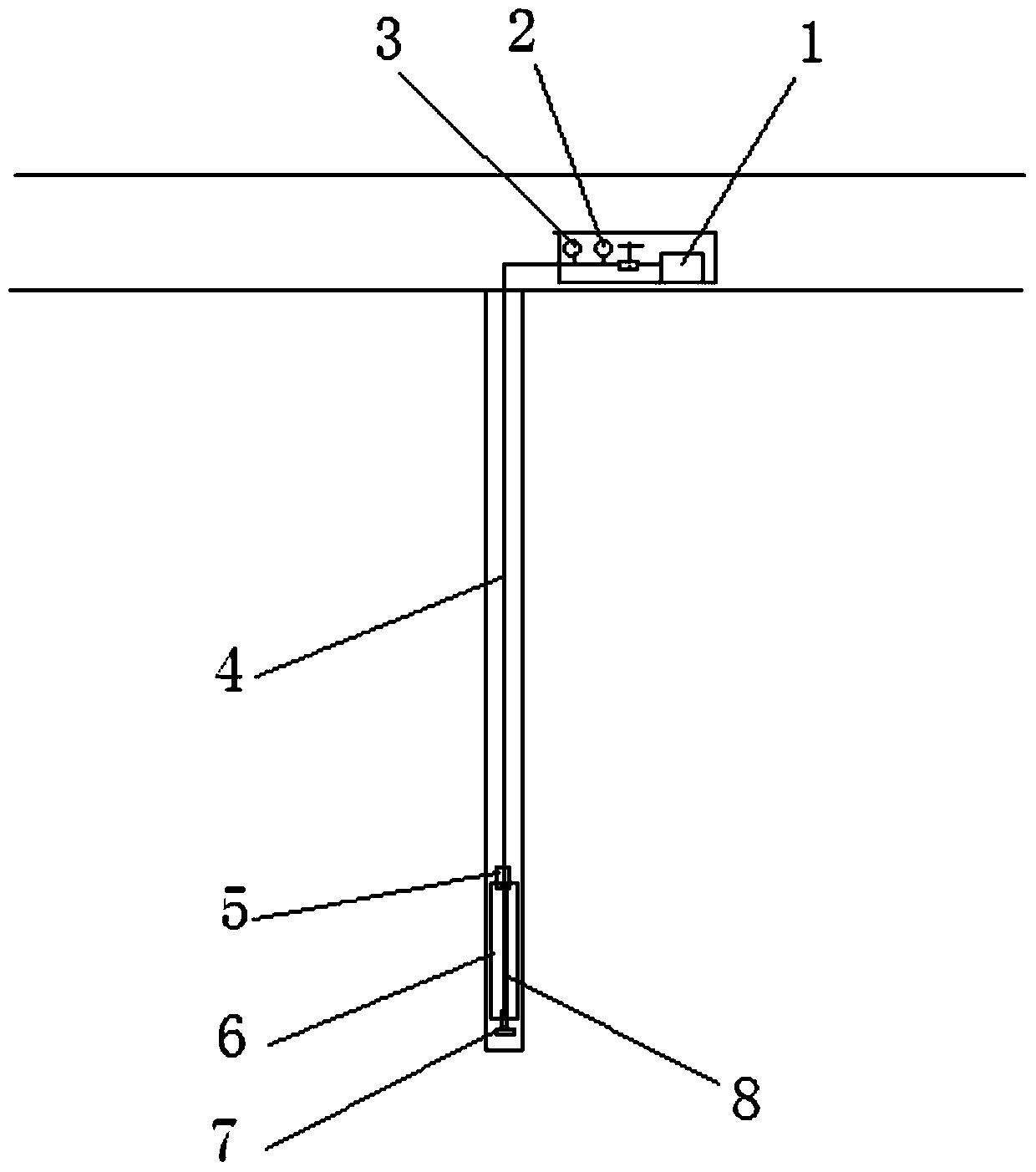
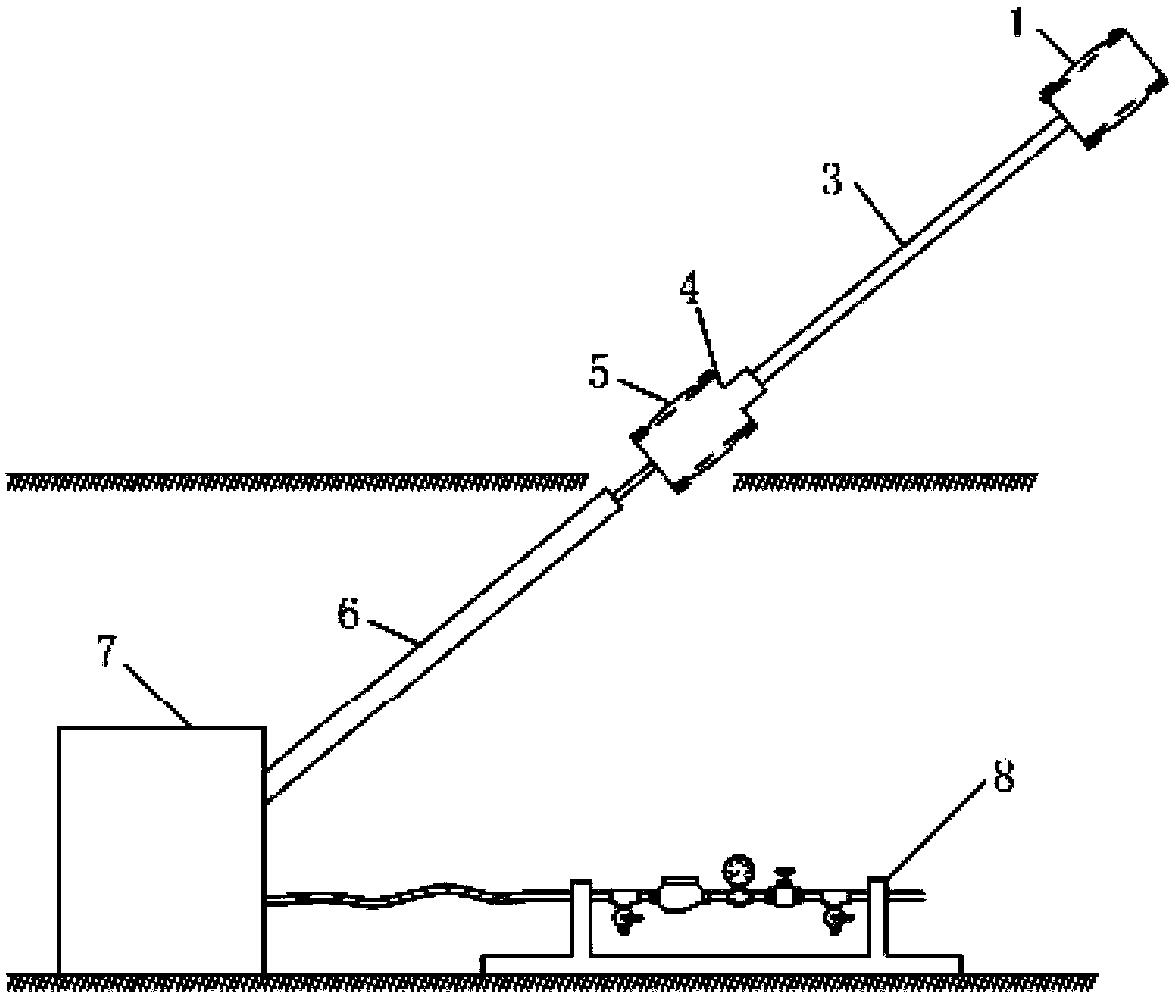
图4为本发明监测系统的电路原理框图。
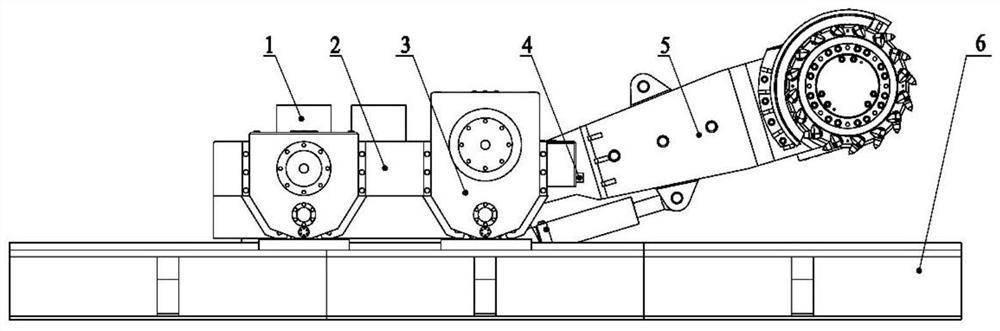
图5为本发明采煤机沿工作面上行过程中的使用状态参考图。
图6为本发明采煤机处于仰采时的使用状态参考图。
图7为本发明预测出调高轨迹的仿真示意图。
附图标记说明:
1—待开采煤层;1-1—巷间测点; 1-2—巷道内测点;
1-3—切眼内测点;2—工作面运输巷; 3—工作面回风巷;
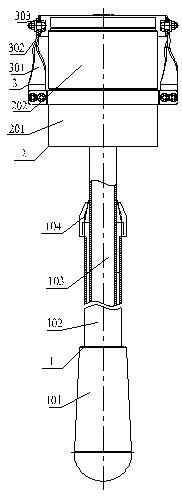
4—切眼;5-1—机身倾角传感器;
5-2—摇臂回转角度传感器;5-3—行走位置检测单元;
5-4—数据处理器;5-5—俯仰角检测单元;
6—数据处理设备;7—采煤机; 7-1—截割滚筒。
具体实施方式
如图1所示的一种基于地质数据的智能化工作面煤岩界面识别方法,包括以下步骤:
步骤一、基于地质数据的煤层三维建模,过程如下:
步骤101、实测地质数据获取:获取待开采煤层1的实测地质数据;所述待开采煤层1的实测地质数据包括煤层地质数据、回采巷道地质数据和切眼地质数据;
所述待开采煤层1的工作面为回采工作面,工作面运输巷2和工作面回风巷3之间通过切眼4连通;所述工作面运输巷2和工作面回风巷3呈平行布设且二者均与所述回采工作面的长度方向呈垂直布设,所述切眼4与所述回采工作面的长度方向呈平行布设;所述待开采煤层1分为运输巷区域煤层、回风巷区域煤层、切眼区域煤层和待开采区域煤层,所述运输巷区域煤层为待开采煤层1中位于工作面运输巷2所处区域的煤层,所述回风巷区域煤层为待开采煤层1中位于工作面回风巷3所处区域的煤层,所述切眼区域煤层为待开采煤层1中位于切眼4所处区域的煤层,所述待开采区域煤层为待开采煤层1中位于工作面运输巷2和工作面回风巷3之间的煤层;
所述回采巷道地质数据包括运输巷地质数据和回风巷地质数据;所述运输巷地质数据包括所述运输巷区域煤层顶部多个测点的三维坐标数据,所述回风巷地质数据包括所述回风巷区域煤层顶部多个测点的三维坐标数据;
所述切眼地质数据包括所述切眼区域煤层顶部多个测点的三维坐标数据;
所述煤层地质数据包括所述待开采区域煤层顶部多个测点的三维坐标数据;
步骤102、煤层模型构建:采用数据处理设备6建立待开采煤层1顶部的三维立体模型,过程如下:
步骤1021、数据存储:调用数据存储模块对步骤一中所述待开采煤层1的实测地质数据进行存储;
步骤1022、插值运算:根据步骤1021中所述待开采煤层1的实测地质数据中所有测点的三维坐标数据,调用插值运算模块计算得出待开采煤层1顶部多个位置点的三维坐标数据;
步骤1023、三维坐标数据库生成:调用数据库生成模块生成待开采煤层1顶部的三维坐标数据库;
所述三维坐标数据库内存储有步骤1021中所述待开采煤层1的实测地质数据中所有测点的三维坐标数据和步骤1022中计算得出的待开采煤层1顶部多个位置点的三维坐标数据;
步骤1024、模型构建:根据步骤1023中生成的待开采煤层1顶部的三维坐标数据库,调用三维建模软件建立待开采煤层1顶面的三维模型;
步骤二、煤层初步开采及煤岩界面识别:采用采煤机7且沿工作面推进方向由后向前对所述待开采煤层1进行开采,并完成所述待开采煤层1的前n个工作面的开采过程;其中,n为正整数且n=6~8;
采用采煤机7对待开采煤层1的任一个所述工作面进行开采之前,根据步骤一中所建立的待开采煤层1顶面的三维模型,对该工作面所处位置处待开采煤层1的煤岩界面进行识别;
采用采煤机7对待开采煤层1的任一个所述工作面进行开采时,根据该工作面所处位置处待开采煤层1的煤岩界面识别结果进行开采;采用采煤机7对任一个所述工作面进行割煤过程中,均采用数据处理设备6对m个截割位置处的滚筒截割姿态数据进行记录,获得该工作面开采过程中的采煤机调高数据组,并采用数据处理设备6将获得的所述采煤机调高数据组同步存储至预先建立的采煤机调高数据库内;所述采煤机调高数据库内按照开采先后顺序由前至后存储有待开采煤层1中当前已完成开采的所有工作面开采过程中的所述采煤机调高数据组;
所述采煤机调高数据组包括对所述待开采煤层1进行一刀割煤过程中m个截割位置处的滚筒截割姿态数据,其中m为正整数且m≥5;m个所述截割位置沿工作面长度方向由前至后进行排列;每个截割位置处的滚筒截割姿态数据均为该截割位置处采煤机7的截割滚筒7-1的三维坐标数据,所述截割滚筒7-1的三维坐标数据中Z轴坐标数据为滚筒高度数据;
步骤三、煤层后续开采及煤岩界面识别:采用采煤机7且沿工作面推进方向由后向前对所述待开采煤层1继续进行开采;
每一个所述工作面开采之前,均先对该工作面的煤岩界面进行识别,过程如下:
步骤301、识别用滚筒高度数据序列获取:采用数据处理设备6从所述采煤机调高数据库内获取当前工作面后侧的n个工作面开采过程中的所述采煤机调高数据组;所获取的n个所述采煤机调高数据组中的所述滚筒高度数据组成识别用滚筒高度数据序列,每个所述采煤机调高数据组中的所述滚筒高度数据均组成一个滚筒高度数据组;所述识别用滚筒高度数据序列中的n个所述滚筒高度数据组按照开采先后顺序由前至后排列,每个所述滚筒高度数据组中均包括m个截割位置处的所述滚筒高度数据;
所述识别用滚筒高度数据序列记作X(0);X(0)=(x(0)(1),x(0)(2),x(0)(3),...,x(0)(n)),其中x(0)(k)为所述识别用滚筒高度数据序列中的第k个所述滚筒高度数据组,其中k为正整数且k=1、2、3、…、n;x(0)(k)中的第h个所述滚筒高度数据记作x(0)(k,h),其中h为正整数且h=1、2、3、…、m;
步骤302、滚筒高度初步预测:采用数据处理设备6且调用灰色预测模型构建模块,对步骤301中所获取的所述识别用滚筒高度数据序列进行处理,建立灰色预测模型;再根据所建立的所述灰色预测模型,采用数据处理设备6处理得出所述待开采煤层1的n+1个所述工作面开采过程中的滚筒高度初步预测结果;
其中,第k'个所述工作面开采过程中的滚筒高度初步预测结果记作 k'为正整数且k'=1、2、3、…、n、n+1; 中包括m个滚筒高度初步预测值;
所得出的前n个所述工作面开采过程中的滚筒高度初步预测结果组成滚筒高度预测数据序列,所述滚筒高度预测数据序列中的n个所述滚筒高度初步预测结果按照开采先后顺序由前至后排列;所述滚筒高度预测数据序列记作 中的第k个所述滚筒高度初步预测结果记作 中的第h个所述滚筒高度初步预测值记作
第n+1个所述工作面开采过程中的滚筒高度初步预测结果记作 为采用采煤机7对当前工作面进行开采过程中的所述滚筒高度初步预测结果; 中的第h个所述滚筒高度初步预测值记作
步骤303、滚筒高度初步预测结果修正,过程如下:
步骤3031、建立预测残差的马尔可夫链:采用数据处理设备6且调用差值运算模块,对步骤301中所述识别用滚筒高度数据序列与步骤302中所述滚筒高度预测数据序列进行差值运算,得出预测残差的马尔可夫链;
所述预测残差的马尔可夫链,记作 为所述预测残差的马尔可夫链中的第k组预测残差, 中包括m个截割位置处的预测残差, 中第h个截割位置处的预测残差记作
步骤3032、马尔可夫预测:采用数据处理设备6且调用马尔科夫预测算法模块对步骤3031中所述预测残差的马尔可夫链进行处理,预测出所述预测残差的马尔可夫链中的第n+1组预测残差
中包括m个截割位置处的预测残差, 中第h个截割位置处的预测残差记作
步骤3033、滚筒高度预测数据组计算:根据步骤302中所述的 和步骤3032中所述的 采用数据处理设备6计算得出当前工作面开采过程中的滚筒高度预测数据组
中包括当前工作面开采过程中m个截割位置处的滚筒高度预测值, 中第h个截割位置处的滚筒高度预测值记作
步骤3034、采煤机调高预测数据组获取:根据步骤3033中所述的当前工作面开采过程中的滚筒高度预测数据组 并结合当前工作面开采过程中m个截割位置处截割滚筒7-1的平面位置信息,采用数据处理设备6得出当前工作面开采过程中的采煤机调高预测数据组,所述采煤机调高预测数据组中包括当前工作面开采过程中m个截割位置处的滚筒截割姿态预测数据;每个截割位置处的滚筒截割姿态预测数据均为预测出的该截割位置处的滚筒截割姿态数据;
步骤304、调高轨迹获取:所述数据处理设备6根据当前工作面开采过程中的所述采煤机调高预测数据组,获得当前工作面的滚筒调高轨迹;
步骤305、煤岩界面分界线输出:采用数据处理设备6输出当前工作面所处位置处待开采煤层1的煤岩界面分界线;当前工作面所处位置处待开采煤层1的煤岩界面分界线为步骤304中获得的当前工作面的滚筒调高轨迹;
步骤三中采用采煤机7对任一个所述工作面进行割煤过程中,均采用数据处理设备6对m个截割位置处的滚筒截割姿态数据进行记录,获得该工作面开采过程中的采煤机调高数据组,并采用数据处理设备6将获得的所述采煤机调高数据组同步存储至预先建立的采煤机调高数据库内。
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0