





专利摘要
本实用新型公开面向社区的无人机配送系统,包括:后台信息系统,接收并处理订单信息和进行订单配送状态确认,控制自动化无人柜订单调度排队,控制无人机配送订单调度排队,规划无人机的航迹路径;自动化无人柜,将目标货物存储在指定位置,将目标货物调度至无人机或接收无人机的货物投递;无人机,根据航迹路径将目标货物配送至目标配送位置,并投递到户外家装收货装置中;或根据航迹路径飞行至目标配送位置,装载目标货物并返航;户外家装收货装置,接收目标货物;云端数据库,实现数据的存储和调用;用户终端APP。本实用新型实现全无人化的末端无人机配送,提升了快递的配送效率以及服务质量,真正实现送货到家。
权利要求
1.面向社区的无人机配送系统,其特征在于:包括:
后台信息系统,接收并处理订单信息和进行订单配送状态确认,根据订单处理结果控制自动化无人柜订单调度排队并反馈订单的货物信息,控制无人机配送订单调度排队,规划无人机从自动化无人柜至目标配送位置的航迹路径;
自动化无人柜,设于社区内部,接收配送员的货物投递并对货物进行长、宽、高、重量的测量和订单号扫描,将目标货物存储在指定位置,将自动化无人柜内部目标货物调度至无人机;或接收无人机的货物投递并进行订单号扫描,将目标货物存储在指定位置;
无人机,获取目标配送位置和配送时间,自动装载目标货物并在配送时间启动无人机配送飞行,根据航迹路径将目标货物配送至目标配送位置,并将目标货物投递到户外家装收货装置中,然后返航;或在配送时间启动无人机配送飞行,根据航迹路径飞行至目标配送位置,装载目标货物并返航,将目标货物投递到至自动化无人柜;
户外家装收货装置,用于无人机进行目标配送位置识别,接收无人机在目标配送位置上投递的目标货物,并向后台信息系统反馈货物接收状态;
云端数据库,与后台信息系统通信,实现数据的存储和调用,云端数据库包括三维地理信息数据库和订单信息数据库,三维地理信息数据库存储各个目标配送位置、社区自动化无人柜固定点的三维地理位置和无人机航线飞行区域的三维地理信息模型;
用户终端APP,进行无人机配送订单下单和配送信息确认。
2.根据权利要求1所述的面向社区的无人机配送系统,其特征在于:所述后台信息系统包括:
用户管理模块,存储用户信息并与用户终端APP和订单管理模块通信实现无人机配送订单下单、配送信息确认、订单处理和的订单配送状态确认;
订单管理模块,接收并处理订单信息和进行订单配送状态确认;
调度管理模块,根据订单处理结果控制自动化无人柜订单调度排队并反馈订单的货物信息,控制无人机配送订单调度排队;
航迹路径规划模块,规划无人机从自动化无人柜至目标配送位置的航迹路径;
无人机飞行姿态控制模块,包括手动辅助控制单元和视觉辅助控制单元;
安全警报模块,对自动化无人柜订单调度排队、无人机配送订单调度排队、无人机配送飞行和户外家装收货装置接收目标货物出现的异常进行安全警报。
3.根据权利要求1所述的面向社区的无人机配送系统,其特征在于:所述自动化无人柜包括柜体(101),柜体内设有多层存货仓,每层存货仓设有多个存货柜(107),每个存货柜均设有货位口;
所述柜体上设有存/取货口(102)和与存/取货口连通的测试台(103),测试台包括称重装置、三维体积测量装置和存货扫描装置;
所述柜体内设有竖直运输通道(104),竖直运输通道与测试台的出口侧连通,竖直运输通道与每层存货仓的每个存货柜的货位口均连通;
所述自动化无人柜还包括在竖直运输通道内做垂直升降运动的升降机(106)和由升降机承载的货物运输机(111),以及控制升降机和货物运输机的控制柜,称重装置、三维体积测量装置和存货扫描装置与控制柜连接传输测量数据;
所述柜体的上端设有与竖直运输通道的顶部连通的无人机停机坪(108);
所述柜体还设有供电装置。
4.根据权利要求3所述的面向社区的无人机配送系统,其特征在于:所述竖直运输通道设于柜体的中轴线上,存货仓环绕竖直运输通道设置,存货柜以竖直运输通道为中心均匀分布且存货柜的货位口与竖直运输通道连通;
或者每层存货仓设有与竖直通道连通的水平运输通道(105),水平运输通道与当前层存货仓每个存货柜的货位口均连通。
5.根据权利要求4所述的面向社区的无人机配送系统,其特征在于:每层所述存货仓设有多层组合存货柜,每层组合存货柜设有多个存货柜,当每层存货仓设有与竖直通道连通的水平运输通道时,存货柜沿水平方向依次设置,且沿水平方向设置的一排存货柜的货位口方向一致。
6.根据权利要求3所述的面向社区的无人机配送系统,其特征在于:所述测试台靠近存/取货口的一侧设有相对测试台向远离存/取货口方向滑动的第一抵块,测试台远离存/取货口的一侧设有相对测试台向靠近存/取货口方向滑动的第二抵块,测试台远离存/取货口的一侧为出口侧,第一抵块和第二抵块由控制柜控制滑动。
7.根据权利要求3所述的面向社区的无人机配送系统,其特征在于:所述竖直运输通道内设有上横梁、下横梁和连接上横梁和下横梁的立柱,立柱设有导轨;
所述升降机包括起升驱动电机、绳轮、滑轮组、钢丝绳、载物台和安全保护装置,其中,起升驱动电机固定连接在上横梁上,绳轮与起升驱动电机的输出轴连接,钢丝绳绕在绳轮和滑轮组上并与载物台连接,载物台与导轨连接,载物台通过起升驱动电机的动力牵引下相对导轨做垂直升降运动,起升驱动电机和安全保护装置均与控制柜连接。
8.根据权利要求3所述的面向社区的无人机配送系统,其特征在于:所述货物运输机包括机体和设于机体上的运输控制器,以及与运输控制器连接用于驱动机体行走的驱动装置,运输控制器与控制柜通信连接,机体上设有两个相对设置且相对机体做垂直升降运动的夹持件,夹持件由运输控制器控制;
所述机体上还设有与运输控制器连接的取货扫描装置,夹持件上还设有与运输控制器连接的接近开关。
9.根据权利要求3所述的面向社区的无人机配送系统,其特征在于:所述无人机停机坪设有与竖直运输通道连通的自动运输带(109),自动运输带由控制柜控制工作,当载物台垂直升降到柜体上端时,货物运输机将货物转移到自动运输带。
10.根据权利要求3所述的面向社区的无人机配送系统,其特征在于:所述供电装置包括供电柜和电池充电储存仓,供电柜连接市电;
所述电池充电储存仓设于柜体上端,电池充电储存仓内设有无线充电装置、电池和机械手装置,无线充电装置连接市电,电池充电储存仓设有仓盖和用于控制仓盖打开和关闭的自动开关器,自动开关器由控制柜控制,电池充电储存仓设有用于安装电池取放槽,无线充电装置设于电池充电储存仓的仓底,机械手装置设于取放槽内,机械手装置包括气泵和与气泵连接的气动伸缩杆,机械手装置由控制柜控制。
11.根据权利要求3所述的面向社区的无人机配送系统,其特征在于:所述自动化无人柜还包括多个红外传感器,红外传感器与控制柜连接向控制柜实时返回监视数据;
柜体上还设有与控制柜连接的无人机扫描装置。
12.根据权利要求1所述的面向社区的无人机配送系统,其特征在于:所述无人机包括机身(201)和设于机身上的多个旋翼(202),机身内设有飞控板,飞控板分别通过电机驱动单元连接有电机,多个旋翼分别与电机的输出轴连接,无人机还包括电源和与飞控板连接的通讯单元;
所述飞控板包括飞行控制器,与飞行控制器连接的IMU单元、磁力计、气压计、GPS单元、超声波传感器、光流传感器和摄像头,电机驱动单元与飞行控制器连接;
所述飞行控制器还连接有雷达、激光测距传感器和机载射频标签;
所述飞行控制器还连接有视觉传感器(205)和扫描器(206)。
13.根据权利要求12所述的面向社区的无人机配送系统,其特征在于:所述无人机还包括与机身连接的快递箱(208),快递箱包括快递箱本体和控制快递箱本体开关的自动开关器,自动开关器与飞行控制器连接由飞行控制器控制;
所述快递箱本体包括与机身连接的顶板(2081),与顶板固定连接的左侧板(2082)和右侧板(2083),与顶板铰接的前侧板(2084)和后侧板(2085),分别与左侧板和右侧板铰接的左底板(2086)和右底板(2087),自动开关器包括用于控制前侧板和后侧板开关的侧板自动开关器,和用于控制左底板和右底板开关的底板自动开关器。
14.根据权利要求1所述的面向社区的无人机配送系统,其特征在于:所述户外家装收货装置包括用于与建筑物连接的收货篮本体(301),收货篮本体的顶部设有多个标签(302);
所述收货篮本体上还设有射频标签(303),射频标签包括户外家装收货装置的唯一标识并储存顾客信息;
所述收货篮本体的底部还设有压力传感器,压力传感器连接有收货控制器,收货控制器连接有通讯单元;
所述收货篮本体上还设有与收货控制器连接的红外传感器。
说明书
技术领域
本实用新型属于物流技术领域,具体涉及面向社区的无人机配送系统。
背景技术
在现有末端配送中,主要以门到门配送与定点取件两种形式,其中往往存在用户时间窗变化导致配送失败、配送时效性差、货损率高、服务质量低配送成本高的问题;另一方面,全国物流快递行业订单量不断增加,中国人口老龄化趋势加强,劳动人口下降,配送员的老龄化和稀少化的问题也不断涌现,具体有:
(1)物流需求的增长。
我国快递业务量的急速膨胀给物流行业带来了挑战,在如此规模的业务量下,物流配送面临巨大的压力,未来的物流不仅仅靠人力来解决的,必定会向智慧物流转型。
(2)快递人员数量的削减。
中国电子商务的发展将带来配送运力需求的快速增长与社会适龄劳动力人口不断减少之间的矛盾,而无人配送是解决这个矛盾的最有效手段。中国劳动年龄人口(16-59岁)在 2011年达到最高点,2012年开始逐年下降,至2017年的6年内减少3800万。随着中国逐渐步入老年社会以及中国城镇化进程的加速,适龄劳动人口数量与日益增长的生产建设、服务消费需求之间存在巨大差距。
(3)人工快递的弊端。
物流订单的增加给物流配送行业带来极大的压力,人工快递投递的延误率较高,偏远地区投递难度大,物流成本逐年升高。物流配送市场需要更加快捷、方便、现代化的物流配送,这为无人机物流配送提供了条件,各大物流企业物流无人机试运行使得无人机物流的发展向前迈了重大一步。
近年来无人机硬件的迅猛发展为无人配送提供了技术基础,随着政策的开放与技术的成熟,无人机配送有着无限的发展前景。
实用新型内容
为了解决现有技术存在的上述问题,结合市场环境,考虑到现有无人机的限制,本实用新型目的在于提供面向社区的无人机配送系统。本实用新型实现全无人化的末端无人机配送,提升了快递的配送效率以及服务质量,真正实现送货到家。
本实用新型所采用的技术方案为:
面向社区的无人机配送系统,包括:
后台信息系统,接收并处理订单信息和进行订单配送状态确认,根据订单处理结果控制自动化无人柜订单调度排队并反馈订单的货物信息,控制无人机配送订单调度排队,规划无人机从自动化无人柜至目标配送位置的航迹路径;
自动化无人柜,设于社区内部,接收配送员的货物投递并对货物进行长、宽、高、重量的测量和订单号扫描,将目标货物存储在指定位置,将自动化无人柜内部目标货物调度至无人机;或接收无人机的货物投递并进行订单号扫描,将目标货物存储在指定位置;
无人机,获取目标配送位置和配送时间,自动装载目标货物并在配送时间启动无人机配送飞行,根据航迹路径将目标货物配送至目标配送位置,并将目标货物投递到户外家装收货装置中,然后返航;或在配送时间启动无人机配送飞行,根据航迹路径飞行至目标配送位置,装载目标货物并返航,将目标货物投递到至自动化无人柜;
户外家装收货装置,用于无人机进行目标配送位置识别,接收无人机在目标配送位置上投递的目标货物,并向后台信息系统反馈货物接收状态;
云端数据库,与后台信息系统通信,实现数据的存储和调用,云端数据库包括三维地理信息数据库和订单信息数据库,三维地理信息数据库存储各个目标配送位置、社区自动化无人柜固定点的三维地理位置和无人机航线飞行区域的三维地理信息模型;
用户终端APP,进行无人机配送订单下单和配送信息确认。
在上述技术方案的基础上,面向社区的无人机配送系统,其特征在于:所述后台信息系统包括:
用户管理模块,存储用户信息并与用户终端APP和订单管理模块通信实现无人机配送订单下单、配送信息确认、订单处理和的订单配送状态确认;
订单管理模块,接收并处理订单信息和进行订单配送状态确认;
调度管理模块,根据订单处理结果控制自动化无人柜订单调度排队并反馈订单的货物信息,控制无人机配送订单调度排队;
航迹路径规划模块,规划无人机从自动化无人柜至目标配送位置的航迹路径;
无人机飞行姿态控制模块,包括手动辅助控制单元和视觉辅助控制单元;
安全警报模块,对自动化无人柜订单调度排队、无人机配送订单调度排队、无人机配送飞行和户外家装收货装置接收目标货物出现的异常进行安全警报。
在上述技术方案的基础上,面向社区的无人机配送系统,所述自动化无人柜包括柜体,柜体内设有多层存货仓,每层存货仓设有多个存货柜,每个存货柜均设有货位口;
所述柜体上设有存/取货口和与存/取货口连通的测试台,测试台包括称重装置、三维体积测量装置和存货扫描装置;
所述柜体内设有竖直运输通道,竖直运输通道与测试台的出口侧连通,竖直运输通道与每层存货仓的每个存货柜的货位口均连通;
所述自动化无人柜还包括在竖直运输通道内做垂直升降运动的升降机和由升降机承载的货物运输机,以及控制升降机和货物运输机的控制柜,称重装置、三维体积测量装置和存货扫描装置与控制柜连接传输测量数据;
所述柜体的上端设有与竖直运输通道的顶部连通的无人机停机坪;
所述柜体还设有供电装置。
在上述技术方案的基础上,面向社区的无人机配送系统,所述竖直运输通道设于柜体的中轴线上,存货仓环绕竖直运输通道设置,存货柜以竖直运输通道为中心均匀分布且存货柜的货位口与竖直运输通道连通;
或者每层存货仓设有与竖直通道连通的水平运输通道,水平运输通道与当前层存货仓每个存货柜的货位口均连通。
在上述技术方案的基础上,面向社区的无人机配送系统,每层所述存货仓设有多层组合存货柜,每层组合存货柜设有多个存货柜,当每层存货仓设有与竖直通道连通的水平运输通道时,存货柜沿水平方向依次设置,且沿水平方向设置的一排存货柜的货位口方向一致。
在上述技术方案的基础上,面向社区的无人机配送系统,所述测试台靠近存/取货口的一侧设有相对测试台向远离存/取货口方向滑动的第一抵块,测试台远离存/取货口的一侧设有相对测试台向靠近存/取货口方向滑动的第二抵块,测试台远离存/取货口的一侧为出口侧,第一抵块和第二抵块由控制柜控制滑动。
在上述技术方案的基础上,面向社区的无人机配送系统,所述竖直运输通道内设有上横梁、下横梁和连接上横梁和下横梁的立柱,立柱设有导轨;
所述升降机包括起升驱动电机、绳轮、滑轮组、钢丝绳、载物台和安全保护装置,其中,起升驱动电机固定连接在上横梁上,绳轮与起升驱动电机的输出轴连接,钢丝绳绕在绳轮和滑轮组上并与载物台连接,载物台与导轨连接,载物台通过起升驱动电机的动力牵引下相对导轨做垂直升降运动,起升驱动电机和安全保护装置均与控制柜连接。
在上述技术方案的基础上,面向社区的无人机配送系统,所述货物运输机包括机体和设于机体上的运输控制器,以及与运输控制器连接用于驱动机体行走的驱动装置,运输控制器与控制柜通信连接,机体上设有两个相对设置且相对机体做垂直升降运动的夹持件,夹持件由运输控制器控制;
所述机体上还设有与运输控制器连接的取货扫描装置,夹持件上还设有与运输控制器连接的接近开关。
在上述技术方案的基础上,面向社区的无人机配送系统,所述无人机停机坪设有与竖直运输通道连通的自动运输带,自动运输带由控制柜控制工作,当载物台垂直升降到柜体上端时,货物运输机将货物转移到自动运输带。
在上述技术方案的基础上,面向社区的无人机配送系统,所述供电装置包括供电柜和电池充电储存仓,供电柜连接市电;
所述电池充电储存仓设于柜体上端,电池充电储存仓内设有无线充电装置、电池和机械手装置,无线充电装置连接市电,电池充电储存仓设有仓盖和用于控制仓盖打开和关闭的自动开关器,自动开关器由控制柜控制,电池充电储存仓设有用于安装电池取放槽,无线充电装置设于电池充电储存仓的仓底,机械手装置设于取放槽内,机械手装置包括气泵和与气泵连接的气动伸缩杆,机械手装置由控制柜控制。
在上述技术方案的基础上,面向社区的无人机配送系统,所述自动化无人柜还包括多个红外传感器,红外传感器与控制柜连接向控制柜实时返回监视数据;
柜体上还设有与控制柜连接的无人机扫描装置。
在上述技术方案的基础上,面向社区的无人机配送系统,所述无人机包括机身和设于机身上的多个旋翼,机身内设有飞控板,飞控板分别通过电机驱动单元连接有电机,多个旋翼分别与电机的输出轴连接,无人机还包括电源和与飞控板连接的通讯单元;
所述飞控板包括飞行控制器,与飞行控制器连接的IMU单元、磁力计、气压计、GPS单元、超声波传感器、光流传感器和摄像头,电机驱动单元与飞行控制器连接;
所述飞行控制器还连接有雷达、激光测距传感器和机载射频标签;
所述飞行控制器还连接有视觉传感器和扫描器。
在上述技术方案的基础上,面向社区的无人机配送系统,所述飞行控制器还连接有风速传感器、转速传感器、湿度传感器和里程计的一个或多个。
在上述技术方案的基础上,面向社区的无人机配送系统,所述无人机还包括与机身连接的快递箱,快递箱包括快递箱本体和控制快递箱本体开关的自动开关器,自动开关器与飞行控制器连接由飞行控制器控制;
所述快递箱本体包括与机身连接的顶板,与顶板固定连接的左侧板和右侧板,与顶板铰接的前侧板和后侧板,分别与左侧板和右侧板铰接的左底板和右底板,自动开关器包括用于控制前侧板和后侧板开关的侧板自动开关器,和用于控制左底板和右底板开关的底板自动开关器。
在上述技术方案的基础上,面向社区的无人机配送系统,所述左底板或右底板上设有与飞行控制器连接的压力传感器;
所述前侧板或后侧板外侧还设有红外传感器。
在上述技术方案的基础上,面向社区的无人机配送系统,所述户外家装收货装置包括用于与建筑物连接的收货篮本体,收货篮本体的顶部设有多个标签;
所述收货篮本体上还设有射频标签,射频标签包括户外家装收货装置的唯一标识并储存顾客信息;
所述收货篮本体的底部还设有压力传感器,压力传感器连接有收货控制器,收货控制器连接有通讯单元;
所述收货篮本体上还设有与收货控制器连接的红外传感器。
在上述技术方案的基础上,面向社区的无人机配送系统,所述标签为可通过视觉传感器识别的十字图形标签。
本实用新型的有益效果为:
本实用新型实现全无人化的末端无人机配送,提升了快递的配送效率以及服务质量,真正实现送货到家。
附图说明
图1是本实用新型-实施例面向社区的无人机配送系统的系统框图。
图2是本实用新型-实施例自动化无人柜的系统框图。
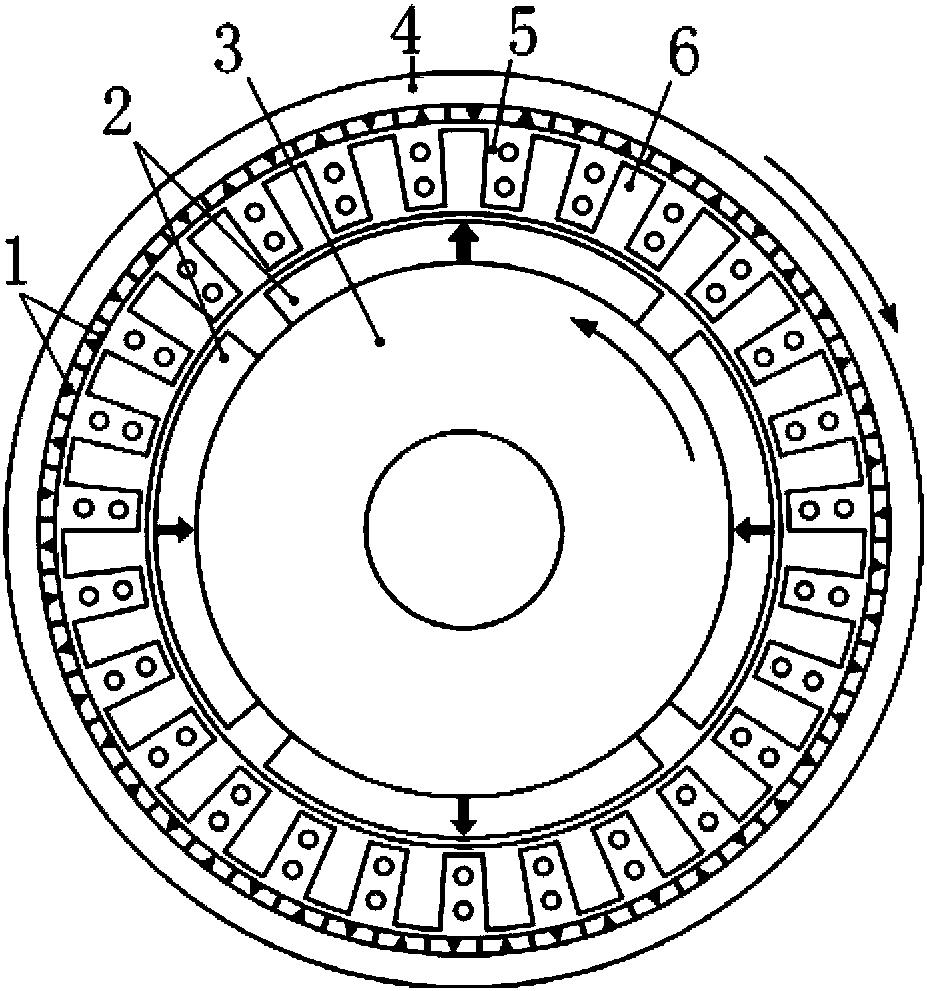
图3是本实用新型-实施例自动化无人柜的一种结构示意图。
图4是本实用新型-实施例自动化无人柜的另一种结构示意图。
图5是本实用新型-实施例无人机的系统框图。
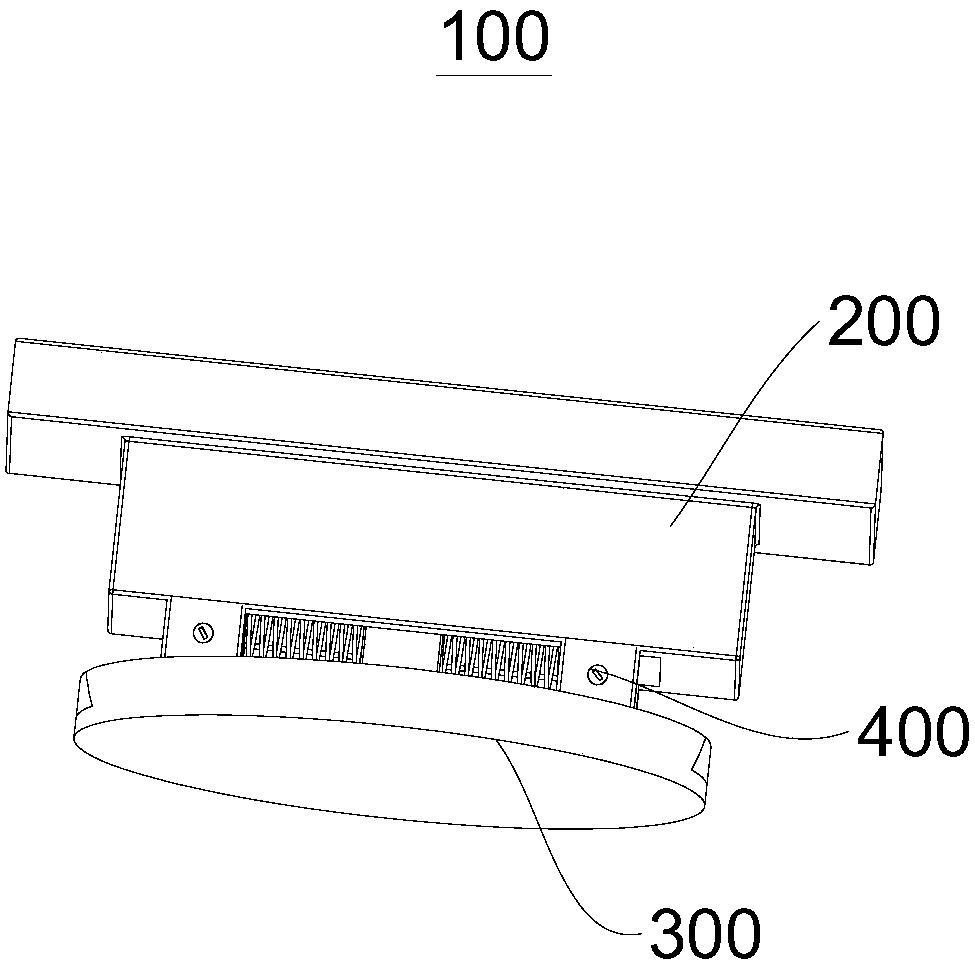
图6是本实用新型-实施例无人机的结构示意图。
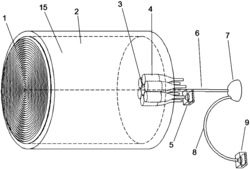
图7是本实用新型-实施例无人机的结构示意图(加快递箱)。
图8是本实用新型-实施例户外家装收货装置的左视结构示意图。
图9是本实用新型-实施例户外家装收货装置的正视结构示意图。
图10是本实用新型-实施例户外家装收货装置的俯视结构示意图。
图11是本实用新型-实施例面向社区的无人机配送系统的配送方法的取件流程图。
图12是本实用新型-实施例面向社区的无人机配送系统的配送方法的寄件流程图。
图13是本实用新型-实施例无人机航迹路径规划方法流程图。
图14是本实用新型-实施例三维地理信息系统的系统框图。
图15是本实用新型-实施例三维地理信息系统无人机航迹路径规划应用场景图。
图中:101-柜体;102-存/取货口;103-测试台;104-竖直运输通道;105-水平运输通道;106-升降机;107-存货柜;108-无人机停机坪;109-自动运输带;110-防雨棚;111-货物运输机;201-机身;202-旋翼;203-电池插入口;204-摄像头;205-视觉传感器;206-扫描器;207-连接件;208-快递箱;2081-顶板;2082-左侧板;2083-右侧板;2084-前侧板; 2085-后侧板;2086-左底板;2087-右底板;301-收货篮本体;302-标签;303-射频标签;304-挂钩装置。
具体实施方式
下面结合附图及具体实施例对本实用新型作进一步阐述。
实施例:
如图1所示,本实施例的面向社区的无人机配送系统,包括:
后台信息系统,接收并处理订单信息和进行订单配送状态确认,根据订单处理结果控制自动化无人柜订单调度排队并反馈订单的货物信息,控制无人机配送订单调度排队,规划无人机从自动化无人柜至目标配送位置的航迹路径;
自动化无人柜,设于社区内部,接收配送员的货物投递并对货物进行长、宽、高、重量的测量和订单号扫描,将目标货物存储在指定位置,将自动化无人柜内部目标货物调度至无人机;或接收无人机的货物投递并进行订单号扫描,将目标货物存储在指定位置;
无人机,获取目标配送位置和配送时间,自动装载目标货物并在配送时间启动无人机配送飞行,根据航迹路径将目标货物配送至目标配送位置,并将目标货物投递到户外家装收货装置中,然后返航;或在配送时间启动无人机配送飞行,根据航迹路径飞行至目标配送位置,装载目标货物并返航,将目标货物投递到至自动化无人柜;
户外家装收货装置,用于无人机进行目标配送位置识别,接收无人机在目标配送位置上投递的目标货物,并向后台信息系统反馈货物接收状态;
云端数据库,与后台信息系统通信,实现数据的存储和调用,云端数据库包括三维地理信息数据库和订单信息数据库,三维地理信息数据库存储各个目标配送位置、社区自动化无人柜固定点的三维地理位置和无人机航线飞行区域的三维地理信息模型;
用户终端APP,进行无人机配送订单下单和配送信息确认。
后台信息系统包括:用户管理模块,存储用户信息并与用户终端APP和订单管理模块通信实现无人机配送订单下单、配送信息确认、订单处理和的订单配送状态确认;
订单管理模块,接收并处理订单信息和进行订单配送状态确认;
调度管理模块,根据订单处理结果控制自动化无人柜订单调度排队并反馈订单的货物信息,控制无人机配送订单调度排队;
航迹路径规划模块,规划无人机从自动化无人柜至目标配送位置的航迹路径;
无人机飞行姿态控制模块,包括手动辅助控制单元和视觉辅助控制单元;
安全警报模块,对自动化无人柜订单调度排队、无人机配送订单调度排队、无人机配送飞行和户外家装收货装置接收目标货物出现的异常进行安全警报。
如图2-4所示,自动化无人柜,包括柜体101,柜体内设有多层存货仓,每层存货仓设有多层组合存货柜,每层组合存货柜设有多个存货柜107,每个存货柜107均设有货位口。
柜体101上设有存/取货口102,存/取货口102连通测试台103,测试台103包括称重装置、三维体积测量装置和存货扫描装置,用于获取货物的长宽高、重量和订单号,称重装置、三维体积测量装置和存货扫描装置与控制柜连接将测量数据传输至控制柜,本实施例中,存/取货口102设于柜体101的下端。
测试台103靠近存/取货口的一侧设有相对测试台103向远离存/取货口方向滑动的第一抵块,测试台103远离存/取货口的一侧设有相对测试台103向靠近存/取货口方向滑动的第二抵块,测试台103远离存/取货口的一侧为出口侧,测试台103的出口侧也为取货时的入口侧,第一抵块和第二抵块由控制柜控制滑动。本实施例中,第一抵块和第二抵块均为L形。
物流、快递行业对所承运的货物通常是以货物的重量或体积的大小进行计费,对体积的计费有时也折算成体积重,例如:长×宽×高(cm)/6000=体积重(kg),在货物的体积重和实重之间取大值作为计算运费的依据。因此,快递配送员首先通过存/取货口102将货物进行投递,然后通道测试台103的称重装置、三维测量装置和存货扫描装置获取货物的长宽高、重量和订单号。
三维体积测量装置运用3D扫描技术快速获取货物的长宽高,称重装置快速获取货物的重量,其优势在于尺寸测量精度和称重精度更高,尺寸平均精度达到3mm,称重精度为10g,存货扫描装置快速获取订单号。通过第一抵块将货物一角格挡至定位原点,再通过三维体积测量装置在三个坐标轴方向进行扫描,分别测量货物的长度、宽度和高度。测量数据传输至控制柜,控制柜将测量数据传输至后台信息系统,在后台数据库中快速检索订单号,实时添加或修改数据。
柜体101内设有竖直运输通道104,其中竖直运输通道104与测试台103的出口侧连通,竖直运输通道与每层存货仓的每个存货柜的货位口均连通。
如图3所示,自动化无人柜的一种结构为:每层存货仓设有与竖直通道连通的水平运输通道105,水平运输通道与当前层存货仓每个存货柜107的货位口均连通,当每层存货仓设有与竖直通道连通的水平运输通道时,存货柜107沿水平方向依次设置,且沿水平方向设置的一排存货柜107的货位口方向一致;方便货物存取,存货柜107的外侧设有自动开关柜门,自动开关柜门由控制柜控制开关,自动开关柜门是针对用户自取设置的。
如图4所示,自动化无人柜的另一种结构为:竖直运输通道设于柜体的中轴线上,存货仓环绕竖直运输通道设置,存货柜以竖直运输通道为中心均匀分布且存货柜的货位口与竖直运输通道连通。
自动化无人柜还包括在竖直运输通道104内做垂直升降运动的升降机106,和由升降机 106承载的货物运输机111。
竖直运输通道104内设有上横梁、下横梁和连接上横梁和下横梁的立柱,上横梁和下横梁由钢板和型钢焊接而成,截面性能好,下横梁的两侧设有运行轮轴孔,运行轮轴孔在落地镗铣床一次装夹加工完成,确保主动滑轮和被动滑轮轮轴线的平行,从而提高了整机运行平稳性,立柱由方钢管制作而成,在方钢管的两侧焊接有扁钢导轨,导轨表面进行硬化处理,耐磨性能好。
升降机106包括起升驱动电机、绳轮、滑轮组、钢丝绳、载物台和安全保护装置,其中,起升驱动电机固定连接在上横梁上,绳轮与起升驱动电机的输出轴连接,钢丝绳绕在绳轮、滑轮组上并与载物台连接,载物台与导轨连接,载物台通过起升驱动电机的动力牵引下相对导轨做垂直升降运动,起升驱动电机和安全保护装置均与控制柜连接。
当每层存货仓设有与竖直通道连通的水平运输通道时,载物台上表面设有滑轨,水平运输通道105内设有滑轨,当载物台垂直升降到任一层水平运输通道105时,载物台的滑轨与水平运输通道105内的滑轨衔接。
货物运输机包括机体和设于机体上的运输控制器,运输控制器与控制柜通信连接。当每层存货仓设有与竖直通道连通的水平运输通道时,运输控制器还连接有用于驱动机体行走的驱动装置,机体的下表面设有与滑轨配合的滑槽。机体上设有两个相对设置且相对机体做垂直升降运动的夹持件,夹持件由运输控制器控制,两个夹持件实现夹包动作,机体可做旋转、垂直升降、伸缩等动作,机体上还设有与运输控制器连接的取货扫描装置,可将指定货物取出,或将货物送入空存货柜107。
机体包括底板,通过旋转装置设于底板上的垂直升降件,与垂直升降件连接的水平伸缩件,两个夹持件与水平伸缩件连接,旋转装置、垂直升降件和水平伸缩件均由运输控制器控制,夹持件上还设有与运输控制器连接的接近开关。
接近开关为光电式接近开关,通过光电识别以及光通讯信号的转化,实现运输控制器的自动控制,同时,采用优化的调速方法,减少货物运输机减速及停机时的冲击,大大缩短货物运输机的启动、停止的缓冲距离,提高了货物运输机的运行效率。
柜体101的上端设有与竖直运输通道104的顶部连通的无人机停机坪108,无人机停机坪108设有与竖直运输通道104连通的自动运输带109,当载物台垂直升降到柜体101上端时,货物运输机将货物转移到自动运输带109上,由自动运输带109将货物转移到无人机的快递箱中,自动运输带109由控制柜控制工作。
柜体101设有供电装置,供电装置包括供电柜和电池充电储存仓,供电柜连接市电,将市电通过变压器转换后供测试台103、升降机106和控制柜使用。
电池充电储存仓设于柜体101上端,电池充电储存仓内设有无线充电装置、电池和机械手装置,电池供货物运输机和无人机使用,无线充电装置连接市电,设置无线充电方式,减少充电时间造成的惩罚成本,提升无人机的飞行动力和货物运输机的存取货效率,电池采用可更换、充电迅速、无污染、能源密度高的氢燃料可充电电池。
电池充电储存仓设有仓盖和用于控制仓盖打开和关闭的自动开关器,自动开关器由控制柜控制,电池充电储存仓设有用于安装电池的取放槽,无线充电装置设于电池充电储存仓的仓底,机械手装置设于取放槽内,机械手装置包括气泵和与气泵连接的气动伸缩杆,机械手装置由控制柜控制。
柜体101的顶部设有防雨棚110,防雨棚110设有太阳能充电板,太阳能充电板通过充电控制单元连接蓄电池,蓄电池与供电装置连接。防雨棚防止雨水渗透自动化无人柜内部,导致设备损坏。
防雨棚110设有供无人机进出的天窗,和控制天窗打开和关闭的自动开关器,自动开关器由控制柜控制。
当每层存货仓设有与竖直通道连通的水平运输通道时,竖直运输通道104设于柜体101 的中部,在实际应用中,无人机停机坪108位于竖直运输通道104顶部的两侧,两侧无人机停机坪108均设置有一架无人机,同样,在对应位置有自动运输带109、天窗和电池充电储存仓等配套设施,一台无人机用于日常配送作业,另一台作为备用机,用于各类特殊场景,共同支撑社区无人机配送系统的运行。
柜体101上还设有与控制柜连接的无人机扫描装置。
无人机扫描装置通过接收无人机上机载射频标签返回的RFID无线电讯号并反馈给控制柜,用于检测无人机与本自动化无人柜的相对位置和状态,并驱动天窗的自动开关器实现天窗的打开和关闭。
本实施例中,为了节省开关动作占用的空间,天窗采用一种自动开关的平移式天窗,自动开关器包括机械移动机构和控制电路板,控制电路板与控制柜连接并控制机械移动机构开关天窗,机械移动机构包括罩壳和罩壳盖板,罩壳内设有电机、减速机构,控制电路板也设于罩壳内,电机的输出轴连接减速机构,减速机构连接天窗。
自动化无人柜,还包括多个红外传感器,用于监视货物在该自动化无人柜内的运行位置,和在该自动化无人柜内整个运行周期内的实时情况,红外传感器与控制柜连接向控制柜实时返回监视数据。
一般在存/取货口102、测试台103、载物台、每层水平运输通道105、每个存货柜107和自动运输带109处均设有红外传感器。
控制柜是本自动化无人柜的控制中心,对自动化无人柜所有存取货物进行管理和存货柜 107分配,对数据进行统计分析,负责协调各个部分的运行,控制和监视整个自动化无人柜的运行,控制自动开关柜门、第一抵块、第二抵块、升降机106、货物运输机、自动运输带 109、天窗、仓盖等现场设备运行,完成货物存货、取货作业。控制柜还连接人机交互装置,人机交互装置包括触摸显示屏和存取扫码装置,人机交互装置用于配送员、用户与本自动化无人柜之间的交互。
控制柜与后台信息系统通信连接,后台信息系统可处理货物信息、用户交互信息、无人机停机对接信息等,控制万向叉装机、输送带、防雨棚的中央开启部的开关以及控制停机坪等的开关,通过无线发射装置与上级进行信息交互、状态反馈等。
自动化无人柜,存取作业流程如下:
Step1、货物由配送人员运送至社区后,从自动化无人柜存/取货口进行快递投放,三维体积测量装置运用3D扫描技术快速获取货物的长宽高,称重装置快速获取货物的重量,存货扫描装置快速获取订单号,将测量数据传输至控制柜,控制柜将测量数据传输至后台信息系统;
若测量数据不符合该自动化无人柜的存货柜存储规格,后台信息系统将反馈投放失败的退回信息,利用第一抵块将货物退回至存/取货口;
Step2、若测量数据符合该自动化无人柜的存货柜存储规格,后台信息系统将反馈投放成功和空存货柜位置信息,利用第二抵块将货物推送至载物台上,控制柜发送上升指令,控制升降机运送货物至指定层存货仓停下,控制柜发送运输指令,控制货物运输机旋转到指定角度,完成存货前期准备工作;
Step3、到达指定存货柜前,货物运输机夹包载物台上的货物,将货物提升使货物悬空,到达指定存货柜时将货物下降,然后将货物释放在指定存货柜内;
Step4、货物运输机接收到控制柜的取货指令时,通过取货扫描装置扫描获取订单号,将测量数据传输至控制柜,控制柜将测量数据传输至后台信息系统,待后台信息系统反馈货物信息准确后,执行取货作业,货物运输机夹包存货柜内的货物,将货物提升使货物悬空;
Step5、控制柜发送上升指令,控制升降机运送货物至柜体上端的无人机停机坪停下,将货物释放在自动运输带上,由自动运输带将货物转移到无人机的快递箱中;
Step6、无人机的快递箱关闭后,由后台信息系统发送配送指令,并通过控制柜控制天窗打开;
Step7、无人机扫描装置通过无人机载射频标签扫描无人机,当无人机驶入(驶离)无线电波磁场范围后,无人机扫描装置则读取(未读取)到无人机信息,由控制柜将无人机信息传输至后台信息系统,发送指令控制天窗打开(关闭);
Step8、无人机在单次配送结束后,通过电池电量计检测电量是否低于设定的阈值,若是,则向后台信息系统实时反馈无人机的电池电量状态信息,并启动另一台无人机进行临时补充配送作业,此时由后台信息系统发送“更换电池”指令,控制电池充电储存仓的仓盖打开,控制机械手装置打开无人机的电池盖,将电池充电储存仓中的已充电的电池装入无人机电池舱盖内,并将对电量不足的电池进行无线充电。
电池盖的开关一般是按钮控制的,这种机构由三个零件组成,分别为顶杆、转盘和滑槽,滑槽中有辅助的弹簧,当按动按钮时,给顶杆施加压力,顶杆沿滑槽运动压迫转盘向下运动,当转盘与滑槽的啮合处脱离时,顶杆头部的特征部分在与转盘的斜面接触处产生的径向力强迫转盘旋转,使转盘与滑槽再次啮合,当再次按压按钮时,重复以上动作。
本实用新型的自动化无人柜,配送成本较低,时效性高,控制柜对自动化无人柜所有存取货物进行管理和存货柜分配,对数据进行统计分析,负责协调各个部分的运行,控制和监视整个自动化无人柜的运行,控制第一抵块、第二抵块、升降机、货物运输机、自动运输带、天窗、仓盖等现场设备运行,完成货物存货、取货作业,通过监视画面,以动态显示现场设备的载货状态、运行位置、货物信息、货位信息等实时信息。
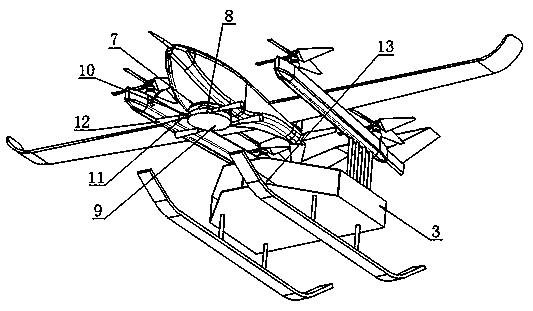
如图5-7所示,本实施例的无人机,包括机身201和设于机身201上的多个旋翼202,机身201内设有飞控板,飞控板分别通过电机驱动单元连接有电机,多个旋翼202分别与电机的输出轴连接,无人机还包括为飞控板和电机供电的电源,以及与飞控板连接的通讯单元。
机身201为中心对称结构,能够实现无人机在空中进行稳定的飞行以及稳定的置空能力。
机身201采用质量轻、强度高的碳素纤维材料制成。
电源包括电池和与电池连接并将电压转换为电源电压VCC的电压转换芯片,机身201的下侧设有电池插入口203,电池插入口处设有电池盖,实现电池的自动更换,达到快速充电的效果,相应地,电池通过插扣安装于电池插入口203内,电池为可充电电池。
飞控板主要用于实现无人机的飞行控制,自动保持无人机的正常飞行姿态,使无人机按照规划的路线飞行。
飞控板包括飞行控制器,与飞行控制器连接的IMU单元、磁力计、气压计、GPS单元、超声波传感器、光流传感器和摄像头204,其中,电机驱动单元与飞行控制器连接。
其中,IMU单元测量物体三轴姿态角(或角速率)以及加速度,磁力计用于测量磁场,气压计用于悬停高度粗略控制,GPS单元用于水平位置高度粗略定位,超声波传感器用于低空高度精确控制或避障,光流传感器用于悬停水平位置精确确定,摄像头用于飞行过程中避障,摄像头204为双目摄像头且为两个,并以机身201中心对称设置。
无人机在飞行时,通过IMU单元为飞行控制器提供姿态解算的数据,通过飞行控制器对当前姿态进行解算,优化控制,产生相应的控制量并通过电机驱动单元对电机进行转速和转向控制,通过控制电机的转速和转向控制每个旋翼的转速,进而提供不同的升力以实现各种姿态,通过磁力计、气压计、GPS单元、超声波传感器和光流传感器实现飞行过程中的位置确定,通过摄像头实现飞行过程中避障。
飞控板还包括与飞行控制器连接的风速传感器、转速传感器、湿度传感器和里程计。
无人机要求在装载与投递作业的降落过程中,要精准定位降落位置,因此,飞控板还包括与飞行控制器连接的雷达、激光测距传感器和机载射频标签,由于GPS单元用于水平位置高度粗略定位,一般计算的海拔高度误差为10米左右,因此,本实用新型利用GPS单元、气压计、雷达和激光测距传感器,实现数据联合解算,使无人机投递作业时,距离投递对象的误差不超过0.7m。
本实施例的无人机还包括与飞行控制器连接的视觉传感器205,视觉传感器205设于机身201的下侧,视觉传感器205为四个,视觉传感器205结合GPS单元、气压计、雷达和激光测距传感器,能够实现装载与投递作业降落在准确位置,高楼层进行投递作业时使无人机精准地停留在合适的位置进行投递,防止投空产生不必要的危险和损失。
本实施例的无人机,还包括设于机身201并与飞行控制器连接的扫描器206。
本实施例的无人机,还包括与飞行控制器连接的电池电量计。
无人机,通过通讯单元连接后台信息系统,后台信息系统包括用户管理模块、订单管理模块、调度管理模块、航迹路径规划模块、无人机飞行姿态控制模块和安全警报模块。
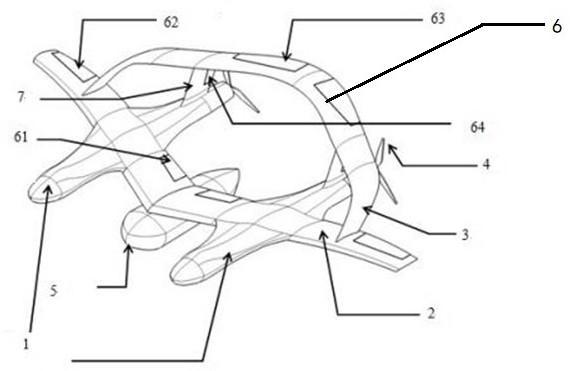
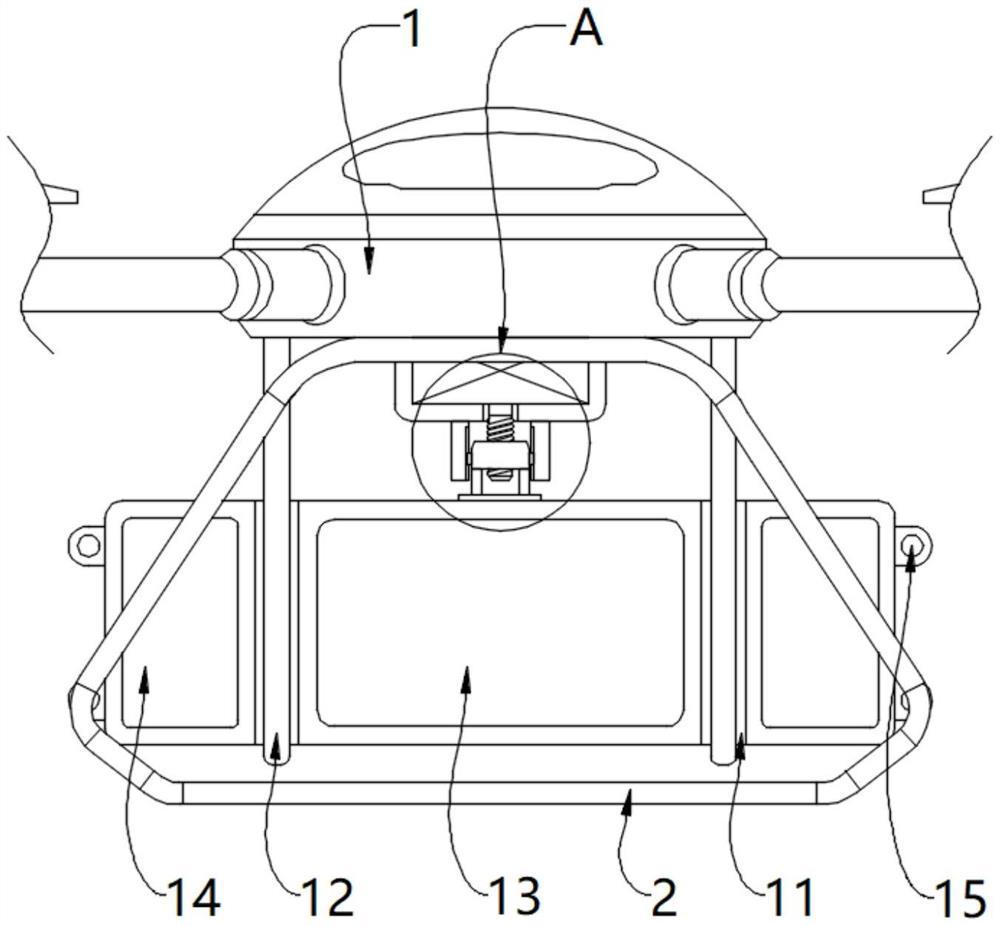
本实施例的无人机还包括通过连接件207与机身201连接的快递箱208,快递箱208完成货物的装载与投递作业。
快递箱208包括快递箱本体和控制快递箱本体开关的自动开关器,快递箱本体采用高强度轻重量的马氏体不锈钢材料制成,自动开关器与飞行控制器连接由飞行控制器控制。
快递箱本体包括与连接件207连接的顶板2081,与顶板2081固定连接的左侧板2082和右侧板2083,与顶板2081铰接的前侧板2084和后侧板2085,分别与左侧板2082和右侧板 2083铰接的左底板2086和右底板2087,自动开关器包括用于控制前侧板2084和后侧板2085 开关的侧板自动开关器,和用于控制左底板2086和右底板2087开关的底板自动开关器。
当自动开关器接收到开关指令时执行相应的动作,前侧板2084和后侧板2085、左底板 2086和右底板2087在无人机运输货物的过程中均是关闭状态。
其中,前侧板2084和后侧板2085在装载货物时打开,方便货物的叉取与固定,达到快速装载货物的效果;左底板2086和右底板2087在投递货物时打开,方便货物自动投递,当无人机到达指定位置并降落到合适高度时,左底板2086和右底板2087打开,货物从中间自然掉落。
左底板2086或右底板2087上设有与飞行控制器连接的压力传感器,用于检测是否成功装载,前侧板2084或后侧板2085外侧还设有红外传感器。
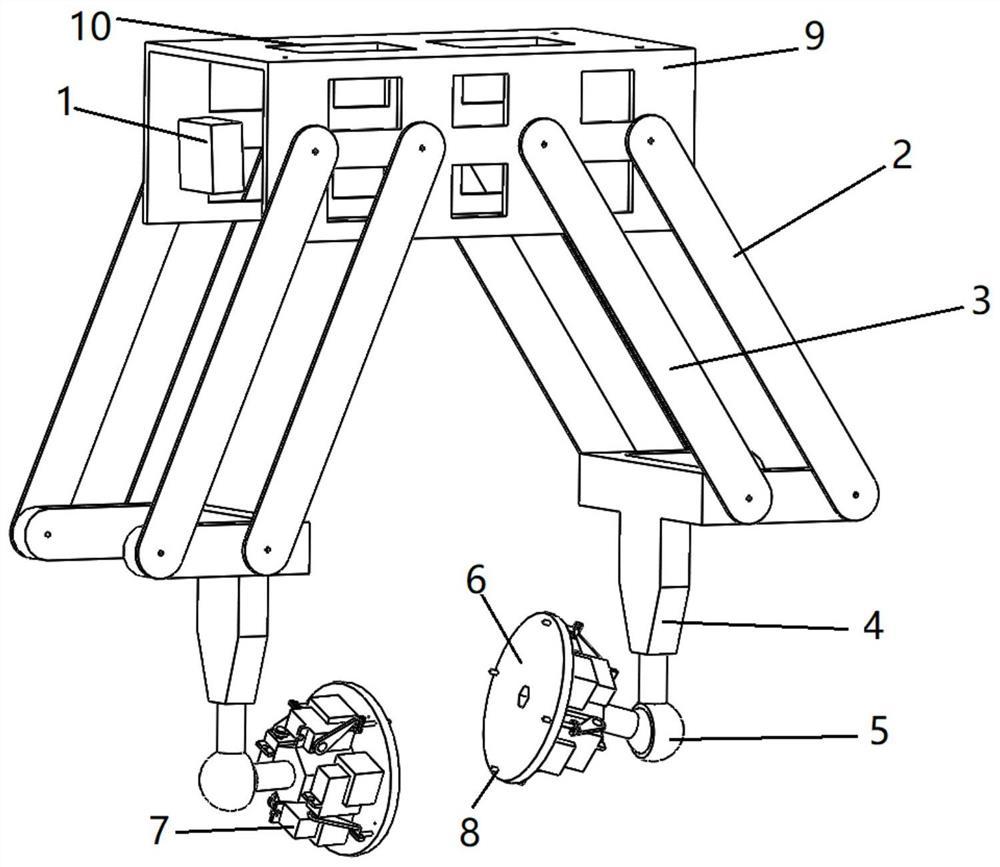
如图8-10所示,户外家装收货装置,包括收货篮本体301,收货篮本体301的顶部设有四个与视觉传感器205位置一一对应的标签302,标签302为十字图形标签,通过视觉传感器205识别十字图形标签中心确定精准位置以及高度,确定无人机停留在正确的目标配送位置,避免投放错误产生的危险。
收货篮本体301上还设有射频标签303,射频标签303包括户外家装收货装置的唯一标识并储存客户信息,客户信息包括姓名、编号、地址、联系方式等,通过扫描器206扫描射频标签303,保证快递与客户精准匹配,确保配送准确,收货篮本体301上设有用于安装射频标签303的卡槽。
收货篮本体301的上侧设有开口,且标签302和射频标签303均设于开口的顶部,收货篮本体301的底部还设有压力传感器,压力传感器连接有收货控制器,通过投递前后检测到的压力不同,能够判断快递是否投递成功,收货控制器连接有通讯单元。
收货篮本体301的上侧开口顶部还设有与收货控制器连接的红外传感器,用于检测货物是否全部投递入收货篮本体301。
收货篮本体301采用防水、防腐、轻便、耐高温、高强度材料制成。
收货篮本体301与墙体挂接或固定连接,当挂接时,收货篮本体301外壁设有挂钩装置 304;当固定连接时,固定连接的方式包括但不限于通过螺钉连接、粘接、焊接等。
本实用新型的户外家装收货装置通过视觉传感器识别标签中心确定精准位置以及高度,确定无人机悬停在正确的目标配送位置,避免投放错误产生的危险,通过扫描器扫描射频标签,接收到户外家装收货装置上射频标签传来的射频信号来确保客户信息正确,保证快递与客户精准匹配,确保配送准确,当信息匹配后,无人机快递箱左底板2086和右底板2087打开,货物投放入户外家装收货装置,无人机的压力传感器检测货物投放后,关闭左底板2086 和右底板2087,户外家装收货装置通过投递前后检测到的压力不同,能够判断快递是否投递成功,通过红外传感器检测货物是否全部投递入收货篮本体。
本实用新型利用GPS单元、气压计、雷达和激光测距传感器,实现数据联合解算,使无人机投递作业时,距离投递对象的误差不超过0.7m,在装载与投递作业的降落过程中,精准定位降落位置,视觉传感器结合GPS单元、气压计、雷达和激光测距传感器,能够实现装载与投递作业降落在准确目标配送位置,高楼层进行投递作业时使无人机精准地停留在合适的目标配送位置进行投递,防止投空产生不必要的危险和损失。利用快递箱完成货物的装载与投递作业,前侧板和后侧板在装载货物时打开,方便货物的叉取与固定,达到快速装载货物的效果;左底板和右底板在投递货物时打开,方便货物自动投递。
如图11所示,面向社区的无人机配送系统的配送方法,包括如下步骤:
SA100、自动化无人柜接收货物投递并对货物进行长、宽、高、重量的测量和订单号扫描,将目标货物存储在指定位置;
SA200、用户在用户终端APP进行无人机配送订单下单和配送信息确认,将订单信息和配送信息传输至后台信息系统;
SA300、后台信息系统接收并处理,根据订单处理结果控制自动化无人柜订单调度排队并反馈订单的货物信息,规划无人机从自动化无人柜至目标配送位置的航迹路径;
SA400、后台信息系统控制无人机配送订单调度排队,自动化无人柜将自动化无人柜内部目标货物调度至无人机,无人机自动装载目标货物;
SA500、无人机获取目标配送位置和配送时间,并在配送时间启动无人机配送飞行,根据航迹路径将目标货物配送至目标配送位置;
SA600、当无人机飞行到目标配送位置附近时,进行目标配送位置识别,此时,用户通过用户终端APP进行在线确认收货,将目标货物投递到户外家装收货装置中,然后返航;
SA700、户外家装收货装置接收无人机在目标配送位置上投递的目标货物,并向后台信息系统反馈货物接收状态;
SA800、后台信息系统接收户外家装收货装置反馈的货物接收状态,然后进行订单配送状态确认。
用户在下单之前,通过用户终端APP输入社区信息和用户信息,并绑定目标配送位置信息进行注册。
订单的货物信息具体包括货物名称、货物类型、货物重量、货物存储货位等信息。
上述SA100中,自动化无人柜接收货物投递并对货物进行长、宽、高、重量的测量和订单号扫描,将货物存储在指定位置的作业流程如下:
SA101、货物由配送人员运送至社区后,从自动化无人柜存/取货口进行快递投放,三维体积测量装置运用3D扫描技术快速获取货物的长宽高,称重装置快速获取货物的重量,存货扫描装置快速获取订单号,将测量数据传输至控制柜,控制柜将测量数据传输至后台信息系统;
若测量数据不符合该自动化无人柜的存货柜存储规格,后台信息系统将反馈投放失败的退回信息,利用第一抵块将货物退回至存/取货口;
SA102、若测量数据符合该自动化无人柜的存货柜存储规格,后台信息系统将反馈投放成功和空存货柜位置信息,利用第二抵块将货物推送至载物台上,控制柜发送上升指令,控制升降机运送货物至指定层存货仓停下,控制柜发送运输指令,控制货物运输机旋转到指定角度,完成存货前期准备工作;
SA103、到达指定存货柜前,货物运输机夹包载物台上的货物,将货物提升使货物悬空,到达指定存货柜时将货物下降,然后将货物释放在指定存货柜内。
上述SA400中,自动化无人柜将自动化无人柜内部目标货物调度至无人机,无人机自动装载目标货物的作业流程如下:
SA401、货物运输机接收到控制柜的取货指令时,通过取货扫描装置扫描获取订单号,将测量数据传输至控制柜,控制柜将测量数据传输至后台信息系统,待后台信息系统反馈货物信息准确后,执行取货作业,货物运输机夹包存货柜内的货物,将货物提升使货物悬空;
SA402、控制柜发送上升指令,控制升降机运送货物至柜体上端的无人机停机坪停下,将货物释放在自动运输带上,由自动运输带将货物转移到无人机的快递箱中。
上述SA500中,无人机获取目标配送位置和配送时间,并在配送时间启动无人机配送飞行时,还包括如下步骤:
SA501、无人机的快递箱关闭后,由后台信息系统发送配送指令,并通过控制柜控制天窗打开;
SA502、无人机扫描装置通过无人机载射频标签扫描无人机,当无人机驶入(驶离)无线电波磁场范围后,无人机扫描装置则读取(未读取)到无人机信息,由控制柜将无人机信息传输至后台信息系统,发送指令控制天窗打开(关闭)。
无人机在单次配送结束后,通过电池电量计检测电量是否低于设定的阈值,若是,则向后台信息系统实时反馈无人机的电池电量状态信息,并启动另一台无人机进行临时补充配送作业,此时由后台信息系统发送“更换电池”指令,控制电池充电储存仓的仓盖打开,控制机械手装置打开无人机的电池盖,将电池充电储存仓中的已充电的电池装入无人机电池舱盖内,并将对电量不足的电池进行无线充电。
上述SA600中,当无人机飞行到目标配送位置附近时,进行目标配送位置识别,将目标货物投递到户外家装收货装置中,然后返航的作业流程为:
SA601、无人机通过视觉传感器识别标签中心确定精准位置以及高度,确定无人机悬停在正确的目标配送位置;
SA602、无人机通过扫描器扫描射频标签,接收到户外家装收货装置上射频标签传来的射频信号来确保客户信息正确;
SA603、当信息匹配后,无人机快递箱左底板和右底板打开,货物投放入户外家装收货装置中;
SA604、无人机的压力传感器检测货物投放后,关闭左底板和右底板,然后返航。
上述SA700中,户外家装收货装置接收无人机在目标配送位置上投递的目标货物,户外家装收货装置通过投递前后检测到的压力不同,判断快递是否投递成功,通过红外传感器检测货物是否全部投递入收货篮本体,并向后台信息系统反馈货物接收状态。
如图12所示,面向社区的无人机配送系统的配送方法,还包括寄件步骤,所述取件步骤如下:
SB100、用户在用户终端APP进行无人机配送订单下单和配送信息确认,将订单信息和配送信息传输至后台信息系统;
SB200、后台信息系统接收并处理,根据订单处理结果控制无人机配送订单调度排队,规划无人机从自动化无人柜至目标配送位置的航迹路径;
SB300、无人机获取目标配送位置和配送时间,在配送时间启动无人机配送飞行,根据航迹路径飞行至目标配送位置;
SB400、当无人机飞行到目标配送位置附近时,进行目标配送位置识别,此时,用户通过用户终端APP进行付款,无人机装载目标货物并返航,将目标货物投递到至自动化无人柜;
SB500、后台信息系统根据订单处理结果控制自动化无人柜订单调度排队并反馈订单的货物信息,自动化无人柜接收货物投递并进行订单号扫描,将目标货物存储在指定位置,并向后台信息系统反馈货物接收状态;
SB600、后台信息系统接收自动化无人柜反馈的货物接收状态,然后进行订单配送状态确认。
如图13所示。面向社区的无人机配送系统的配送方法,所述无人机的航迹路径规划方法,对无人机航迹路径规划提出三个假设:
假设1:无人机处于定高、恒速飞行状态,无人机转向存在最大偏转角;
假设2:航迹路径预规划只考虑已知静态威胁,动态威胁按一定运动规律运行,可被实时检测到;
假设3:静态威胁以圆形区域来描述,威胁在圆形区域内按统一的威胁等级来度量。
包括如下步骤:
SC100、利用RRT算法生成随机采样点tran,利用RRT算法找到从根节点tini到目标点tgoa的无人机航迹路径;
SC200、对随机采样点tran的选取进行优化和对随机采样点tran的生成过程进行优化,得到优化无人机航迹路径。
上述利用RRT算法找到从根节点tini到目标点tgoa的规划路径的具体实施步骤包括如下:
SC101、确定与无人机配套的自动化无人柜固定点为随机树根节点tini,从三维地理信息数据库中获得自动化无人柜固定点的三维地理位置信息;
SC102、从三维地理信息数据库中获得配送末端含有障碍物三维地理位置信息的三维地理信息模型;
SC103、选取目标点tgoa,以一定的偏向概率P在规划区域内随机选取状态空间中的随机采样点tran,以tnea表示距随机采样点tran最近的树节点,并在tran-tnea的连线上以扩展步长D为单位截取新节点tnew;
SC104、若无人机从上一节点向新节点tnew行进路径中没有碰到障碍物,则将新节点tnew作为扩展节点加入到扩展树中;否则重新随机选取随机采样点tran,并重复步骤SC102-SC104 直至新节点tnew到达目标区域时终止。
由于RRT算法是宏观规划模型,在终端并不是精确定位到目标点,所以要配合无人机辅助传感,确定无人机可以精准定位的目标区域范围(假设一个圆),然后在RRT随机树节点到达这个目标区域时就可以结束。
对随机采样点tran的选取进行优化包括通过选取评价指标步长D与父节点向下一随机采样点tran生成的偏转角度α及相应的权重系数并通过评价函数对随机采样点tran进行评价,具体实施步骤包括如下:
由于随机采样点tran的选取与得到的最优无人机航迹路径所需时间与航迹质量直接相关,因此需要对随机采样点tran的选取进行优化,为了选取最优的随机采样点tran,需要对随机采样点tran进行评价,由于两点之间直线最短,因此最短航线一定是随机树根节点tini与目标点tgoa的连线,可知当RRT算法得到的路径与连线tini-tgoa越贴近,得到的路径越优,为使航迹路径尽可能短,需使得到的最优无人机航迹路尽可能与tini-tgoa的连线接近,因此,选择步长D与偏转角度α为评价指标,x1、x2分别为步长D与偏转角度α的权重系数,评价函数M=x1·D′+x2·α′,由于指标量纲不统一,对步长D和偏转角度α进行无量纲化处理,计算一组k个随机采样点tran,然后利用极大-极小值法求出D′和α′,计算公式如下:
上述Dmax为步长D的最大值,Dmin为步长D的最小值,αmax为偏转角度α的最大值,αmin为偏转角度α的最小值。
上述对随机采样点tran的生成过程进行优化包括:对父节点向下一随机采样点tran生成的偏转角度α加以约束完成随机采样点tran生成方向的优化,具体实施步骤包括如下:
从三维地理信息数据库中调用IMU单元测量的无人机方位角 数据,偏转角度α加以约束的约束条件为: 为无人机的最大偏转角,父节点向下一随机采样点tran生成的方位角为
上述对随机采样点tran的生成过程进行优化包括:对步长D加以约束进行步长D的扩展,具体实施步骤包括如下:
为优化步长D,考虑到若以传统固定步长D进行扩展节点选择,易在某次扩展时直接踏入威胁区域导致扩展失败,因此根据无人机飞行假设约束条件的最小直飞航程d将RRT算法固定步长D划分为d1、d2、d3……dn,判断各分点是否进入威胁区域,假定在分点dp时首次与障碍物相交,将dp与dp-1两段距离的交点tp加入扩展树。
上述对随机采样点tran的生成过程进行优化包括:对步长D和偏转角度α的权重系数x1、 x2进行细分,具体实施步骤包括如下:
针对社区配送特性对步长D和偏转角度α的定义进行优化,考虑到单次配送货物重量约束、配送货物的特性约束(易碎易开裂等)、配送时间窗约束等条件,需要对步长D和偏转角度α的权重系数x1、x2进行细分,由于社区配送过程中影响无人机航迹路径规划路线的因素对步长D和偏转角度α的权重系数的影响程度不同,以wi和yi(i=1,2,3,…,n)分别对权重系数x1、x2进行量化处理,考虑到不同影响条件的量纲不统一,对wi和yi(i=1,2,3,…,n)进行基于极大-极小值法的无量纲化处理,计算公式如下:
上述wmax为wi的最大值,wmin为wi的最小值,ymax为yi的最大值,ymin为yi的最小值。
上述对随机采样点tran的生成过程进行优化包括:优先选择目标点tgoa作为扩展子节点并将上一次扩展父节点作为本次扩展父节点,具体实施步骤包括如下:
若步骤SC104中,无人机从上一节点向新节点tnew行进路径中没有碰到障碍物,则随机选择节点作为新的扩展方向和扩展节点,在利用RRT算法执行步骤SC103生成随机采样点 tran之前,将最后一个加入扩展树的扩展节点作为树节点tnea,将目标点tgoa作为随机采样点tran,并在tran-tnea的连线上以扩展步长D为单位截取新节点tnew,若步骤SC104中无人机从树节点tnea向新节点tnew的行进路径中没有经过障碍物区域,则将新节点tnew作为扩展节点加入到扩展树;若步骤SC104中,无人机从上一节点向新节点tnew行进路径中碰到障碍物,则执行步骤SC103生成随机采样点tran。本实用新型无人机的航迹路径规划方法,社区配送得到的路径结果质量高,路径最优。
如图14所示,云端数据库设有三维地理信息系统,包括:
系统层,包括分布式服务器集群,进行分布式数据存储;
数据层,包括存储有各个户外家装收货装置的中央三维地理位置、社区自动化无人柜固定点的三维地理位置和无人机航线飞行区域的三维地理信息模型的三维地理信息数据库,三维地理信息数据库包括几何位置信息数据库和语义信息数据库,几何位置信息数据库描述社区三维地理信息,由于与地面的详细信息无关,因此对地面的路网信息以和地面低矮地物的信息并不做存储,社区三维地理信息包括实体高于设定高度的地理信息,和实体在相应高度上的简要纹理信息,由于针对社区配送并具有专题性,因此仅需要简要纹理信息即可,不需要高精度纹理信息;语义信息数据库,描述社区内实体的语义信息,户外家装收货装置的中央三维地理位置即目标配送位置;
逻辑对象层,包括多个实体对象。
上述实体包括建筑物、树木、电线杆和户外家装收货装置。
上述相应高度上的简要纹理信息包括点、线和面的几何特征数据。
上述点存储实体端点位置和边界棱角点,为了刻画实体的整个形状;线存储实体棱边信息,由若干个点组成,表征了实体的边界;面存储实体表面范围信息,由若干条线组成。
上述树木的面采用椭球描述,树木的躯干部分采用圆柱描述。
实体的语义信息包括:建筑物的楼层信息、建筑物类型、用途、编号和阳台/窗户朝向,户外家装收货装置的所属用户id、所属阳台/窗户位置和阳台/窗户类型。
三维地理信息系统,还包括应用层,应用层包括地理信息入库模块、社区三维地理信息渲染模块、户外家装收货装置管理模块、用户权限与信息模块和图形基本操作模块;
地理信息入库模块,用于社区三维地理信息的更新;
社区三维地理信息渲染模块,用于社区三维地理信息渲染;
户外家装收货装置管理模块,用于户外家装收货装置的语义信息管理;
用户权限与信息模块,用于用户权限与信息管理;
图形基本操作模块,对图像进行基本操作。
本实用新型结合分布式服务器集群进行分布式数据存储,几何位置信息数据库可以存储大范围的三维地理信息数据,同时因为专题性强,本实用新型构建的数据对象具有针对性,对渲染效果的精度要求有定向性,因此能够实现对大范围地区的构建,并发性强。
本实用新型产生的大量数据也可作为大数据分析的数据源,对于数据分析以及大数据产业有产出,数据的价值可以被体现。
本实用新型的可扩展性很强,既能够满足本身GIS增删改查等基本几何位置信息数据库的功能,同时也能够扩展,比如在个别社区进行精细建模和存储用以特殊需求,对阳台/窗户和户外家装收货装置的位置信息的存储,探索其能否模糊识别等。
本实用新型可以避免数据更新问题,现有的三维/二维地理信息数据需要应对时刻变化的地表信息,因为现在的时代发展迅猛。本实用新型提供高可用和可行的数据纠错和更新能力,由于地理信息是时刻变化的,因此地理信息入库模块进行专门的数据更新,能够应对时空变化下的三维地理信息的变更,本实用新型由于针对性强,同时面向的地理信息又不像路网数据更新频繁和复杂,而是建筑物信息的更新和删除,因此此模块可采用手动和现场操作模式对本实用新型的社区三维地理信息进行更新。
三维地理信息系统的无人机航迹路径规划应用方法,包括如下步骤:
SD101、三维地理信息数据库存储各个户外家装收货装置的中央三维地理位置、社区自动化无人柜固定点的三维地理位置和无人机航线飞行区域的三维地理信息模型,并对社区三维地理信息进行渲染;
SD102、用户下单,根据索引检索目标用户的户外家装收货装置的中央三维地理位置、社区自动化无人柜固定点的三维地理位置、可能遇到的所有障碍物的三维地理位置和无人机当前姿态,系统根据三维地理信息模型中数据结合全局规划和局部避障进行无人机航迹路径规划;
SD103、无人机根据航迹规划结果进行配送飞行。
全局规划和局部避障时,从几何位置信息数据库中调用树木、电线杆和建筑物高于设定高度的地理信息和在相应高度上的简要纹理信息,设定无人机水平与障碍物距离大于一个阈值,设定无人机飞行高度不超过建筑物最高高度。
阈值:通过判断测量单元测量的无人机相关参数,包括加速度、GPS坐标的精度、超声波传感器、光流传感器、摄像头的精度与测量范围,计算出测量单元的安全距离,即为阈值。
设定无人机飞行高度不超过建筑物最高高度—气压计用于悬停高度粗略控制(Pa),因此要根据气压计的精度为最高高度设置一个安全最高高度D+d,其中D是建筑物最高高度,d 是气压计高度最大误差范围。
本实用新型的三维地理信息系统的几何位置信息数据库和语义信息数据库对实体对象进行分类,主要分为建筑物、树木、电线杆和户外家装收货装置等地物形式,并对地物进行很好的空间几何和语义描述,非常适用于后期进行无人机的航迹路径规划。
对社区三维地理信息进行渲染的方法,包括如下步骤:
SD201、建立金字塔索引对几何位置信息数据库中的社区进行城区内划分和城市划分;
SD202、在划分后的社区内描述社区三维地理信息,社区三维地理信息包括实体高于设定高度的地理信息,和相应高度上的简要纹理信息,相应高度上的简要纹理信息包括点、线和面的几何特征数据;
SD203、实时更新社区三维地理信息。
本实用新型不局限于上述可选实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是落入本实用新型权利要求界定范围内的技术方案,均落在本实用新型的保护范围之内。
面向社区的无人机配送系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0