







专利摘要
本实用新型公开了一种飞行机器人,包括飞行器和控制器,飞行器包括:摄像头,传感器单元;与摄像头及传感器单元连接的、用于对摄像头采集的视频信号以及传感器单元获取的姿态数据进行处理的FPGA芯片;若干个与FPGA芯片及电机连接的、用于控制电机启停及速度的电机驱动电路;与FPGA芯片连接的、用于接收FPGA处理过的视频信号和姿态数据进行处理并发送至控制器并接收控制器的控制信号的DSP芯片;与DSP芯片连接的、用于根据距离的远近交替为DSP及控制器传送数据的第一WIFI模块和第一4G通信模块;用于为飞行器供电的供电模块。本实用新型通过同时设置4G模块和WIFI模块,根据距离的远近交替为飞行器和控制器进行数据传输。
权利要求
1.一种飞行机器人,包括飞行器和与飞行器无线连接用于控制飞行器飞行并进行数据采集的控制器,其特征在于,所述飞行器包括:
用于采集视频的摄像头;
用于获取角速度和加速度生成姿态数据的传感器单元;
与摄像头及传感器单元连接的、用于根据预设程序对视频信号以及姿态数据进行处理的FPGA芯片;
若干个与FPGA芯片及电机连接的、用于控制电机启停及速度的电机驱动电路;
与FPGA芯片连接的、用于根据预设程序接收FPGA处理过的视频信号和姿态数据进行处理并发送至控制器并接收控制器的控制信号的DSP模块;
与DSP模块连接的、用于根据距离的远近交替为DSP模块及控制器传送数据的第一WIFI模块和第一4G通信模块;
分别与摄像头、传感器单元、FPGA芯片、电机驱动电路、DSP模块、第一WIFI模块和第一4G通信模块连接的、用于供电的供电模块。
2.根据权利要求1所述的飞行机器人,其特征在于,所述DSP模块包括:与运动目标检测与跟踪单元、第一4G通信模块、第一WIFI模块及供电模块连接的、用于接收经过处理的图像数据并通过第一4G通信模块或第一WIFI模块发送至控制器的DSP芯片;与DSP芯片连接的、用于存储图像数据的第二SDRAM存储器;与DSP连接的用于存储主程序的FLASH存储器。
3.根据权利要求2所述的飞行机器人,其特征在于,所述电机驱动电路包括第一电阻、第二电阻、场效应管、第一二极管和电机接口;所述第一电阻的一端连接电调单元、所述第一电阻的另一端连接第二电阻及场效应管的漏极,所述第二电阻的另一端连接场效应管的源极及接地端,所述场效应管的栅极连接第一二极管的输入端及电机接口的第二脚,所述第一二极管的输出点连接电机接口的第一脚及电源端。
4.根据权利要求3所述的飞行机器人,其特征在于,所述第一WIFI模块包括无线收发芯片、第一电容、第二电容、第三电容、第四电容、第五电容、第六电容、第七电容、第八电容、第九电容、第三电阻、第四电阻、第五电阻、第一电感、第二电感、天线和晶振;所述无线收发芯片的第一脚至第六脚分别与DSP芯片的第117脚至第123脚连接,所述无线收发芯片的第七脚与所述第一电容的一端、第二电容的一端、第三电容的一端、第四电阻的一端、第五电阻的一端及自身的第十五、第十八脚和十九脚连接,所述无线收发芯片的第八脚与所述第一电容另一端、第二电容另一端、第三电容的另一端、第三电阻的一端及自身的第十四脚、第十七脚和第二十脚连接并接地,所述第三电阻的另一端与无线收发芯片的第十六脚连接,所述无线收发芯片的第九脚与所述晶振的第一脚及第四电容的一端连接,所述无线收发芯片的第十脚与所述晶振的第三脚及第五电容的一端连接,所述无线收发芯片的第十一脚与所述第六电容的一端、第七电容的一端及第一电感的一端连接,所述无线收发芯片的第十二脚与所述第一电感的另一端及第二电感的一端连接,所述无线收发芯片的第十三脚与所述第二电感的另一端及第三电感的一端连接,所述第三电感的另一端与第八电容的一端连接,所述第八电容的另一端与所述天线及第九电容的一端连接,所述第四电容、第五电容、第六电容、第七电容和第九电容的另一端均接地,所述第四电阻的两端均接地,所述第五电阻的另一端与3.3V电源连接。
5.根据权利要求4所述的飞行机器人,其特征在于,所述传感器单元包括运动传感器、第六电阻、第七电阻、第十电容、第十一电容、第十二电容和第十三电容;所述运动传感器的第一脚接地,所述运动传感器的第八脚接3.3V电源及第十电容的一端,所述运动传感器的第十脚与所述第十一电容的一端连接,所述运动传感器的第九脚与所述第十电容的另一端、第十一电容的另一端、自身的第十一脚连接,所述运动传感器的第十二脚与所述传感器控制单元连接,所述运动传感器的第十三脚连接3.3V电源及第十二电容的一端,所述运动传感器的第十八脚连接所述第十二电容的另一端及接地端,所述运动传感器的第二十脚与所述第十三电容的一端连接,所述第十三电容的另一端接地,所述运动传感器的第二十三脚与所述第六电阻的一端连接,所述运动传感器的第二十四脚与所述第七电阻的一端连接,所述第六电阻的另一端和所述第七电阻的另一端均接地。
6.根据权利要求5所述的飞行机器人,其特征在于,所述控制器包括:
用于接收第一WIFI模块发送的数据的第二WIFI模块;
用于接收第一4G通信模块发送的数据的第二4G通信模块;
用于发送控制信号的处理器模块;
用于显示数据的屏幕。
7.根据权利要求6所述的飞行机器人,其特征在于,所述FPGA芯片的型号为EP1C3T144C8。
8.根据权利要求6所述的飞行机器人,其特征在于,所述DSP芯片的型号为TMS320VC5409。
9.根据权利要求6所述的飞行机器人,其特征在于,所述第一WIFI模块和所述第二WIFI模块的型号均为SI24R1,所述第一4G通信模块和第二4G通信模块的型号为EC20。
说明书
技术领域
本实用新型涉及飞行机器人领域,特别涉及一种飞行机器人。
背景技术
飞行机器人应用非常广泛,从民用到军用,都可以见到其身影,同时飞行机器人可以说是一个多学科的交叉的前沿性课题,涉及到的技术复杂。
飞行机器人的设计中主要包括硬件部分和软件部分,硬件部分包括飞行器和遥控控制端,飞行器部分包括无线收发部分、处理器部分和各种传感器等;远程遥控控制部分主要包括无线收发部分、处理器和显示屏幕等。
现有飞行机器人大都是采用无线射频控制,该技术使得飞行机器人的飞行距离近,如果飞行距离稍微远点,很容易失去控制。
因此现有技术还有待改进和提高。
实用新型内容
鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种飞行机器人,通过同时设置4G模块和WIFI模块,根据距离的远近交替为飞行器和控制器进行数据传输。
为了达到上述目的,本实用新型采取了以下技术方案:
本实用新型提供一种飞行机器人,包括飞行器和与飞行器无线连接用于控制飞行器飞行并进行数据采集的控制器,其特征在于,所述飞行器包括:用于采集视频的摄像头;用于获取角速度和加速度生成姿态数据的传感器单元;与摄像头及传感器单元连接的、用于根据预设程序对视频信号以及姿态数据进行处理的FPGA芯片;若干个与FPGA芯片及电机连接的、用于控制电机启停及速度的电机驱动电路;与FPGA芯片连接的、用于根据预设程序接收FPGA处理过的视频信号和姿态数据进行处理并发送至控制器并接收控制器的控制信号的DSP模块;与DSP模块连接的、用于根据距离的远近交替为DSP模块及控制器传送数据的第一WIFI模块和第一4G 通信模块;与摄像头、传感器单元、FPGA芯片、电机驱动电路、DSP模块、第一WIFI模块和第一4G通信模块连接的、用于供电的供电模块。
所述DSP模块包括:与运动目标检测与跟踪单元、第一4G通信模块、第一WIFI模块及供电模块连接的、用于接收经过处理的图像数据并通过第一4G通信模块或第一WIFI模块发送至控制器的DSP芯片;与DSP芯片连接的、用于存储图像数据的第二SDRAM存储器;与DSP连接的用于存储主程序的FLASH存储器。
所述电机驱动电路包括第一电阻、第二电阻、场效应管、第一二极管和电机接口;所述第一电阻的一端连接电调单元、所述第一电阻的另一端连接第二电阻及场效应管的漏极,所述第二电阻的另一端连接场效应管的源极及接地端,所述场效应管的栅极连接第一二极管的输入端及电机接口的第二脚,所述第一二极管的输出点连接电机接口的第一脚及电源端。
所述第一WIFI模块包括无线收发芯片、第一电容、第二电容、第三电容、第四电容、第五电容、第六电容、第七电容、第八电容、第九电容、第三电阻、第四电阻、第五电阻、第一电感、第二电感、天线和晶振;所述无线收发芯片的第一脚至第六脚分别与DSP芯片的第117脚至第123脚连接,所述无线收发芯片的第七脚与所述第一电容的一端、第二电容的一端、第三电容的一端、第四电阻的一端、第五电阻的一端及自身的第十五、第十八脚和十九脚连接,所述无线收发芯片的第八脚与所述第一电容另一端、第二电容另一端、第三电容的另一端、第三电阻的一端及自身的第十四脚、第十七脚和第二十脚连接并接地,所述第三电阻的另一端与无线收发芯片的第十六脚连接,所述无线收发芯片的第九脚与所述晶振的第一脚及第四电容的一端连接,所述无线收发芯片的第十脚与所述晶振的第三脚及第五电容的一端连接,所述无线收发芯片的第十一脚与所述第六电容的一端、第七电容的一端及第一电感的一端连接,所述无线收发芯片的第十二脚与所述第一电感的另一端及第二电感的一端连接,所述无线收发芯片的第十三脚与所述第二电感的另一端及第三电感的一端连接,所述第三电感的另一端与第八电容的一端连接,所述第八电容的另一端与所述天线及第九电容的一端连接,所诉第四电容、第五电容、第六电容、第七电容和第九电容的另一端均接地,所述第四电阻的两端均接地,所述第五电阻的另一端与3.3V电源连接。
所述传感器单元包括运动传感器、第六电阻、第七电阻、第十电容、第十一电容、第十二电容和第十三电容;所述运动传感器的第一脚接地,所述运动传感器的第八脚接3.3V电源及第十电容的一端,所述运动传感器的第十脚与所述第十一电容的一端连接,所述运动传感器的第九脚与所述第十电容的另一端、第十一电容的另一端、自身的第十一脚连接,所述运动传感器的第十二脚与所述传感器控制单元连接,所述运动传感器的第十三脚连接3.3V电源及第十二电容的一端,所述运动传感器的第十八脚连接所述第十二电容的另一端及接地端,所述运动传感器的第二十脚与所述第十三电容的一端连接,所述第十三电容的另一端接地,所述运动传感器的第二十三脚与所述第六电阻的一端连接,所述运动传感器的第二十四脚与所述第七电阻的一端连接,所述第六电阻的另一端和所述第七电阻的另一端均接地。
所述控制器包括:用于接收第一WIFI模块发送的数据的第二WIFI模块;用于接收第一4G通信模块发送的数据的第二4G通信模块;用于发送控制信号的处理器模块;用于显示数据的屏幕。
所述FPGA芯片的型号为EP1C3T144C8。
所述DSP芯片的型号为TMS320VC5409。
所述第一WIFI模块和所述第二WIFI模块的型号均为SI24R1,所述第一4G通信模块和第二4G通信模块的型号为EC20。
相较于现有技术,本实用新型提供的飞行机器人中,包括飞行器和与飞行器无线连接用于控制飞行器飞行并进行数据采集的控制器,所述飞行器包括:摄像头和传感器单元;与摄像头及传感器单元连接的、用于对摄像头采集的视频信号以及传感器单元获取的姿态数据进行处理的FPGA芯片;若干个与FPGA芯片及电机连接的、用于控制电机启停及速度的电机驱动电路;与FPGA芯片连接的、用于接收FPGA处理过的视频信号和姿态数据进行处理并发送至控制器并接收控制器的控制信号的DSP芯片;与 DSP芯片连接的、用于根据距离的远近交替为DSP及控制器传送数据的第一WIFI模块和第一4G通信模块;与DSP芯片连接、用于为飞行器供电的供电模块。本实用新型通过同时设置4G模块和WIFI模块,根据距离的远近交替为飞行器和控制器进行数据传输。
附图说明
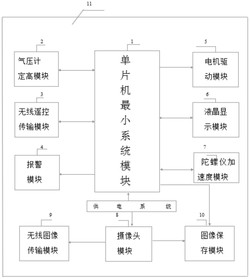
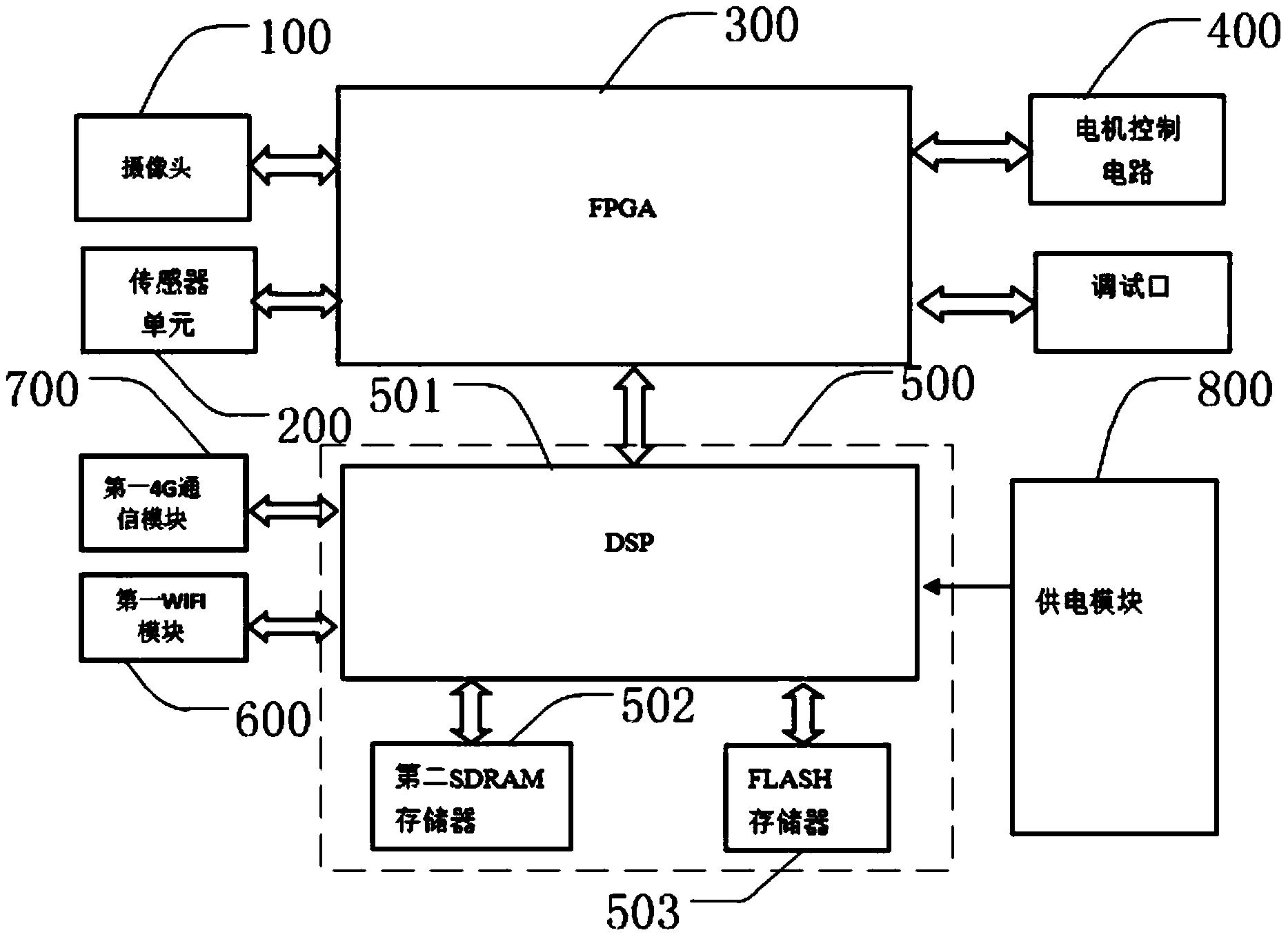
图1为本实用新型提供的飞行器的结构框图;
图2为本实用新型提供的FPGA芯片内部的电路结构图;
图3为本实用新型提供的电机驱动电路;
图4为本实用新型提供的第一WIFI模块的电路图;
图5为本实用新型提供的传感器单元的电路图。
具体实施方式
本实用新型提供一种供电电源切换电路及供电系统,通过供电电源切换电路在外部电源接入时关断开关模块,以切断内部电源供电,将供电方式转化为外部电源供电,实现了不同供电的方式的自由切换。
为使本实用新型的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
由于现有飞行机器人大都是采用无线射频控制,该技术使得飞行机器人的飞行距离近,如果飞行距离稍微远点,很容易失去控制。同时在具体实现中大多数飞行机器人采用的是单片机的控制方式,该方式虽然成本较低,但是功耗高,控制简单,无法满足实时性控制的相关要求。因此,有必要提供一种新型的飞行机器人电路。
综上所述,请参阅图1,本实用新型提供一种飞行机器人,包括飞行器和与飞行器无线连接用于控制飞行器飞行并进行数据采集的控制器,其特征在于,所述飞行器包括:用于采集视频的摄像头100;用于获取角速度和加速度生成姿态数据的传感器单元200;与摄像头100及传感器单元200 连接的、用于对视频信号以及姿态数据进行处理的FPGA芯片300;若干个与FPGA芯片300及电机连接的、用于控制电机启停及速度的电机驱动电路400;与FPGA芯片300连接的、用于接收FPGA处理过的视频信号和姿态数据进行处理并发送至控制器并接收控制器的控制信号的DSP模块 500;与DSP模块500连接的、用于根据距离的远近交替为DSP模块500 及控制器传送数据的第一WIFI模块600和第一4G通信模块700;与摄像头100、传感器单元200、FPGA芯片300、电机驱动电路400、DSP模块 500、第一WIFI模块600和第一4G通信模块700连接的、用于供电的供电模块800。
具体实施时,本实用新型实施例中,在飞行器中使用FPGA芯片300 和DSP芯片501结合来进行数据处理,飞行器开始工作时,由摄像头100 采集外部的视频画面,转换成视频信号传至FPGA芯片300内,同时传感器单元200获取飞行器的角速度和加速度,生成姿态数据传至FPGA芯片 300内;FPGA芯片300对视频信号和姿态数据进行处理再传至DSP进行处理,最后通过第一WIFI模块600或第一4G通信模块700发送至控制器。具体的,所述FPGA芯片上还设置有调试口,所述调试口用于下载代码,以实现FPGA的功能。
请参阅图2,本实用新型实施例中,所述FPGA芯片300的内部包括:与摄像头100连接的、用于初始化摄像头100的摄像头初始化单元301;与摄像头100连接的、用于通过摄像头100进行数据采集的数据采集时序控制单元302;与数据采集时序控制单元302连接的、用于将采集到的数据进行保存的写FIFO单元303;与写FIFO单元303连接的、用于将写FIFO 中的数据存入与自身连接的第一SDRAM存储器305的SDRAM控制器 304;与SDRAM控制器304连接的、用于读取所述第一SDRAM存储器 305中的数据的读FIFO306单元;与读FIFO306单元连接的、用于获取读 FIFO306单元读取的数据进行数字形态滤波的数字形态滤波单元;与数字形态滤波单元连接的、用于根据数字形态滤波的数据进行运动目标检测和跟踪的运动目标检测与跟踪单元308;与DSP模块500及电机驱动电路400 连接的、用于根据DSP模块500传来控制信号控制电机驱动电路400使电机启停并对电机调速的电调单元309;与传感器单元200连接的、用于测量传感器单元200的状态以获取角速度及加速度的传感器控制单元310。
需要说明的是,上述FPGA芯片片内资源只是本实用新型选用的现有的FPGA芯片的一部分功能。
具体实施时,本实用新型实施例中,飞行器上电时,通过摄像头初始化单元301将摄像头100进行初始化,飞行器起飞之后,控制端发送控制指令打开摄像头100,摄像头100采集外部的视频画面,并转化为视频信号传至数据采集时序控制单元302,所述数据采集时序控制单元302将视频信号收集之后传至写FIFO单元303保存,当写FIFO单元303存满视频数据后,SDRAM控制器304开始将写FIFO中的视频数据写入第一SDRAM存储器305中。
在进行下一步数据处理时,即可由SDRAM控制器304从第一SDRAM 存储器305中将视频数据读取出来保存到读FIFO306单元中,再从读 FIFO306中提取视频数据传至数学形态滤波单元307进行数学形态滤波,然后传至运动目标检测与跟踪单元308,根据滤波后的数据实现目标检测和跟踪;最后将将数据传输至DSP模块500并通过第一WIFI模块600或第一4G通信模块700进行传输。特别的,所述第一WIFI模块600和第一4G 通信模块700之间的切换根据飞行器与控制器之间的距离来选择,具体可为50米内通过WIFI传输,50米外通过4G基站传输。
请继续参阅图1,所述DSP模块500包括:与运动目标检测与跟踪单元308、第一4G通信模块700、第一WIFI模块600及供电模块800连接的、用于接收经过处理的图像数据并通过第一4G通信模块700或第一WIFI 模块600发送至控制器的DSP芯片501;与DSP芯片501连接的、用于存储图像数据的第二SDRAM存储器502;与DSP连接的用于存储主程序的 FLASH存储器503。
具体实施时,本实用新型实施例中,所述DSP芯片501将目标检测和跟踪单元传来是信号保存至第二SDRAM存储器502中,并根据FLASH存储器503存储的程序来处理所述数据并然后通过第一WIFI模块600或第一4G通信模块700传输至控制器中。
请参阅图3,所述电机驱动电路400包括第一电阻R1、第二电阻R2、场效应管MOS、第一二极管D1和电机接口J1;所述第一电阻R1的一端连接电调单元309、所述第一电阻R1的另一端连接第二电阻R2及场效应管MOS的漏极,所述第二电阻R2的另一端连接场效应管MOS的源极及接地端,所述场效应管MOS的栅极连接第一二极管D1的输入端及电机接口J1的第二脚,所述第一二极管D1的输出点连接电机接口J1的第一脚及电源端。具体的,本实用新型实施例中,选用四个电机驱动电路400分别对四个电机进行控制。需要说明的是,电机数量可根据飞行器的大小、重量等具体情况进行选择,在此不做限定。
请参阅图4,所述第一WIFI模块600包括无线收发芯片U1、第一电容C1、第二电容C2、第三电容C3、第四电容C4、第五电容C5、第六电容C6、第七电容C7、第八电容C8、第九电容C9、第三电阻R3、第四电阻R4、第五电阻R5、第一电感L1、第二电感L2、天线ANT和晶振Y1;所述无线收发芯片U1的第一脚至第六脚分别与DSP芯片501的第117脚至第123脚连接,所述无线收发芯片U1的第七脚与所述第一电容C1的一端、第二电容C2的一端、第三电容C3的一端、第四电阻R4的一端、第五电阻R5的一端及自身的第十五、第十八脚和十九脚连接,所述无线收发芯片U1的第八脚与所述第一电容C1另一端、第二电容C2另一端、第三电容C3的另一端、第三电阻R3的一端及自身的第十四脚、第十七脚和第二十脚连接并接地,所述第三电阻R3的另一端与无线收发芯片U1的第十六脚连接,所述无线收发芯片U1的第九脚与所述晶振Y1的第一脚及第四电容C4的一端连接,所述无线收发芯片U1的第十脚与所述晶振Y1的第三脚及第五电容C5的一端连接,所述无线收发芯片U1的第十一脚与所述第六电容C6的一端、第七电容C7的一端及第一电感L1的一端连接,所述无线收发芯片U1的第十二脚与所述第一电感L1的另一端及第二电感L2 的一端连接,所述无线收发芯片U1的第十三脚与所述第二电感L2的另一端及第三电感的一端连接,所述第三电感的另一端与第八电容C8的一端连接,所述第八电容C8的另一端与所述天线ANT及第九电容C9的一端连接,所诉所述第四电容C4、第五电容C5、第六电容C6、第七电容C7和第九电容C9的另一端均接地,所述第四电阻R4的两端均接地,所述第五电阻R5的另一端与3.3V电源连接。
请参阅图5,所述传感器单元200包括运动传感器U2、第六电阻R6、第七电阻R7、第十电容C10、第十一电容C11、第十二电容C12和第十三电容C13;所述运动传感器U2的第一脚接地,所述运动传感器U2的第八脚接3.3V电源及第十电容C10的一端,所述运动传感器U2的第十脚与所述第十一电容C11的一端连接,所述运动传感器U2的第九脚与所述第十电容C10的另一端、第十一电容C11的另一端、自身的第十一脚连接,所述运动传感器U2的第十二脚与所述传感器控制单元310连接,所述运动传感器U2的第十三脚连接3.3V电源及第十二电容C12的一端,所述运动传感器U2的第十八脚连接所述第十二电容C12的另一端及接地端,所述运动传感器U2的第二十脚与所述第十三电容C13的一端连接,所述第十三电容C13的另一端接地,所述运动传感器U2的第二十三脚与所述第六电阻R6的一端连接,所述运动传感器U2的第二十四脚与所述第七电阻R7 的一端连接,所述第六电阻R6的另一端和所述第七电阻R7的另一端均接地。
具体的所述第四电阻R4和第五电阻R5为0欧姆电阻。
所述控制器包括:用于接收第一WIFI模块600发送的数据的第二WIFI 模块;用于接收第一4G通信模块700发送的数据的第二4G通信模块;用于发送控制信号的处理器模块;用于显示数据的屏幕。
具体实施时,控制器通过第二WIFI模块或第二4G通信模块接收飞行器中的第一WIFI模块600或第一4G通信模块700传来的数据,并显示在屏幕上,根据用户的在屏幕上的操作,控制器内的处理器模块中的处理器发送控制信号至飞行器中控制飞行器的飞行姿态、电机转速、开启关闭等操作。特别的,所述控制器可为一切包括WIFI功能及4G通信功能的智能设备,在本实用新型实施例中,可为手机、平板等移动终端,或飞行器遥控器。
需要说明的是,飞行器和控制器之间的通信还可以通过蓝牙、红外线等其他射频通信模式和4G通信模式结合,也可以通过新兴的5G通信模式与射频通信方式进行结合。
具体的,本实用新型实施例中,所述FPGA芯片300的型号为 EP1C3T144C8,所述DSP芯片501的型号为TMS320VC5409,所述场效应管MOS采用SI2302BDS的增强模式场效应晶体管;所述第一WIFI模块和所述第二WIFI模块的型号为SI24R1,其工作频段在2.4-2.5GHz;所述运动传感器U2的型号为MPU9250;所述第一4G通信模块700和第二4G通信模块的型号为EC20。
另外,所述供电模块800中提供1.8V、3.3V和5V三种电压,由芯片 TPS73HD318将电压从5V分别转换至3.3V和1.8V,并分别传输至各个模块进行供电,同时为DSP芯片501提供复位信号。
综上所述,本实用新型提供的一种飞行机器人中,包括飞行器和与飞行器无线连接用于控制飞行器飞行并进行数据采集的控制器,所述飞行器包括:摄像头,传感器单元;与摄像头及传感器单元连接的、用于对摄像头采集的视频信号以及传感器单元获取的姿态数据进行处理的FPGA芯片;若干个与FPGA芯片及电机连接的、用于控制电机启停及速度的电机驱动电路;与FPGA芯片连接的、用于接收FPGA处理过的视频信号和姿态数据进行处理并发送至控制器并接收控制器的控制信号的DSP芯片;与 DSP芯片连接的、用于根据距离的远近交替为DSP及控制器传送数据的第一WIFI模块和第一4G通信模块;用于为飞行器供电的供电模块。本实用新型通过同时设置4G模块和WIFI模块,根据距离的远近交替为飞行器和控制器进行数据传输。
可以理解的是,对本领域普通技术人员来说,可以根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,而所有这些改变或替换都应属于本实用新型所附的权利要求的保护范围。
一种飞行机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0