








专利摘要
本实用新型公开了一种适用于临近空间的浮空器,浮空器包括从上往下依次设置的浮空主体、载荷舱和配重舱;浮空主体浮力可调,配重舱内装有压舱物、配重舱上设有卸料口和可开闭的舱门,载荷舱内设有控制舱门开闭的控制装置。方法为先测定零风层内主流风向发生改变的界限高度面;后在控制器内设定浮空器需要驻留的预定区域,预定区域位于零风层内其底面为零风层最小高度面、顶面为界限高度面;再放飞至预定区域;到达后调整浮力与重力至平衡,使竖向加速度为零,浮空器速度渐变为零,实现驻留;驻留后,当水平位移过大,释放压舱物,使浮空器上浮至零风层中界限高度面以上区域回漂,在高度方向由于空气阻力使浮空器驻留与预定区域内。
权利要求
1.一种适用于临近空间的浮空器,其特征在于:它包括从上往下依次设置的浮空主体、载荷舱和配重舱;浮空主体浮力可调,配重舱内装有压舱物、配重舱上设有卸料口和可开闭的舱门,载荷舱内设有控制舱门开闭的控制装置。
2.根据权利要求1所述的适用于临近空间的浮空器,其特征在于:所述控制装置包括电源、传感器和控制器,载荷舱或配重舱内设有执行舱门开闭的执行元件;电源用于向回路供电,传感器和执行元件分别与控制器相连,传感器用于判定浮空器当前状态,控制器用于根据传感器判定的浮空器状态控制执行元件工作以控制舱门的开闭;所述配重舱有相互独立工作的多个,各配重舱从上往下成串布置于载荷舱底面中心,或各配重舱并列均布于载荷舱的底面,或各配重舱串成多组后并列布置于载荷舱底面,所述执行元件与配重舱一一对应布置,每一执行元件用于控制对应位置处配重舱上舱门的开闭。
3.根据权利要求2所述的适用于临近空间的浮空器,其特征在于:所述配重舱为底部设有出液口的封闭筒;所述执行元件为设置于出口处的电磁阀。
4.根据权利要求2所述的适用于临近空间的浮空器,其特征在于:或者所述配重舱包括底部开口的圆筒和设置于开口处的筒盖,筒盖的一端铰接于圆筒上、非铰接端设有弹簧,弹簧的另一端通过系绳与圆筒的内壁相连,弹簧处于拉伸状态;所述执行元件为能够熔断系绳的热熔丝。
5.根据权利要求2所述的适用于临近空间的浮空器,其特征在于:或者所述配重舱包括连为一体的上壳和底盖,上壳与底盖的拼接处设有爆破点,所述执行元件为设置于爆破点处的电雷管。
6.根据权利要求1或2所述的适用于临近空间的浮空器,其特征在于:所述浮空主体包括平衡球和套于平衡球外的动力球,平衡球的浮力不大于载荷舱与配重舱的重力之和,平衡球的临界体积大于动力球的临界体积。
7.根据权利要求2所述的适用于临近空间的浮空器,其特征在于:或者所述浮空主体包括上、下布置的动力球和平衡球,动力球与平衡球之间设有释放机构,平衡球的浮力不大于载荷舱与配重舱的重力之和。
8.根据权利要求7所述的适用于临近空间的浮空器,其特征在于:所述释放机构包括保温舱和设置于保温舱内的电路板和所述执行元件,所述平衡球通过系绳连接于保温舱的底部,执行元件为能够熔断系绳的热熔丝;保温舱的外部设有回收伞。
9.根据权利要求1所述的适用于临近空间的浮空器,其特征在于:所述载荷舱的舱体内壁设有保温层,舱体外设有回收伞。
说明书
技术领域
本实用新型属于飞行器领域,尤其涉及一种适用于临近空间的浮空器。
背景技术
在距离地面20~100公里的空域被称为临近空间,这一空域空气比较稀薄,不受国界限制,具有较大的开发价值。临近空间高空气球依靠浮力平衡重力,实现在大气中悬浮。由于其相对于大型飞艇具有更低的放飞成本、对放飞条件要求更低、更好的机动性、适用于批量生产,受到各领域广泛关注。
一方面临近空间高空气球放飞后,由于大气风速和风向的影响,各高度风速不一,高空气球所处高度不能便捷的实时调节,则可能在该高度位置处的水平面上发生严重的横向漂移,当高空气球横向漂移离地面基站距离过远,会造成通信的中断,给高空气球的广泛应用带来一定的不便。
另一方面由于浮空器装载的是比空气稀薄的气体,在临近空间是一种“飘浮”的状态,因此,维持其运动状态所耗费的能量极少。目前,国内只有超压球和某些薄膜材料零压球可实现高空驻留,但是这类气球价格昂贵,如果橡胶气球可以实现这一功能,成本可大大降低,目前我国还没有实现橡胶气球在空中任意高度驻留的技术,原则上橡胶气球在充气后会一直上升直至炸裂。
实用新型内容
本实用新型的目的在于提供一种既能避免大距离横向漂移又能实现高空驻留的适用于临近空间的浮空器。
本实用新型提供的这种适用于临近空间的浮空器,它包括从上往下依次设置的浮空主体、载荷舱和配重舱;浮空主体浮力可调,配重舱内装有压舱物、配重舱上设有卸料口和可开闭的舱门,载荷舱内设有控制舱门开闭的控制装置。
在一个具体实施方式中,使所述控制装置包括电源、传感器和控制器,载荷舱或配重舱内设有执行舱门开闭的执行元件;电源用于向回路供电,传感器和执行元件分别与控制器相连,传感器用于判定浮空器当前状态,控制器用于根据传感器判定的浮空器状态控制执行元件工作以控制舱门的开闭;所述配重舱有相互独立工作的多个,各配重舱从上往下成串布置于载荷舱底面中心,或各配重舱并列均布于载荷舱的底面,或各配重舱串成多组后并列布置于载荷舱底面,所述执行元件与配重舱一一对应布置,每一执行元件用于控制对应位置处配重舱上舱门的开闭。
作为优选,可以使所述配重舱为底部设有出液口的封闭筒;所述执行元件为设置于出口处的电磁阀。
作为替代方案,或者可以使所述配重舱包括底部开口的圆筒和设置于开口处的筒盖,筒盖的一端铰接于圆筒上、非铰接端设有弹簧,弹簧的另一端通过系绳与圆筒的内壁相连,弹簧处于拉伸状态;所述执行元件为能够熔断系绳的热熔丝。
作为替代方案,还可以使所述配重舱包括连为一体的上壳和底盖,上壳与底盖的拼接处设有爆破点,所述执行元件为设置于爆破点处的电雷管。
为了便于实现高空驻留,使所述浮空主体包括平衡球和套于平衡球外的动力球,平衡球的浮力不大于载荷舱与配重舱的重力之和,平衡球的临界体积大于动力球的临界体积。
作为便于实现高空驻留的替代方案,或者使所述浮空主体包括上、下布置的动力球和平衡球,动力球与平衡球之间设有释放机构,平衡球的浮力不大于载荷舱与配重舱的重力之和。
在一个具体实施方式中,使所述释放机构包括保温舱和设置于保温舱内的所述电路板和所述执行元件,所述平衡球通过系绳连接于保温舱的底部,执行元件为能够熔断系绳的热熔丝,保温舱的外部设有回收伞。
为了保证在高空低温环境下可靠的工作,在所述载荷舱的舱体内壁设有保温层,舱体外设有回收伞。
本实用新型在放飞前设定需要达到的位于零风层内的预定驻留区域,放飞后,由传感器监测实时工况,并将数据反馈至控制器,通过调节浮空主体的浮力与配重舱的自重实现竖直方向上力的平衡,实现高空驻留;驻留后检测到本浮空器在零风层内由于水平风的作用导致水平位移过大时,控制器控制执行元件工作,使配重舱舱门打开,调控本浮空器进入零风层风向相反的高度区域,此时浮空器在水平方向由于反向风作用实现回漂、在高度方向由于空气阻力的作用实现驻留,使之驻留于预定区域内。
附图说明
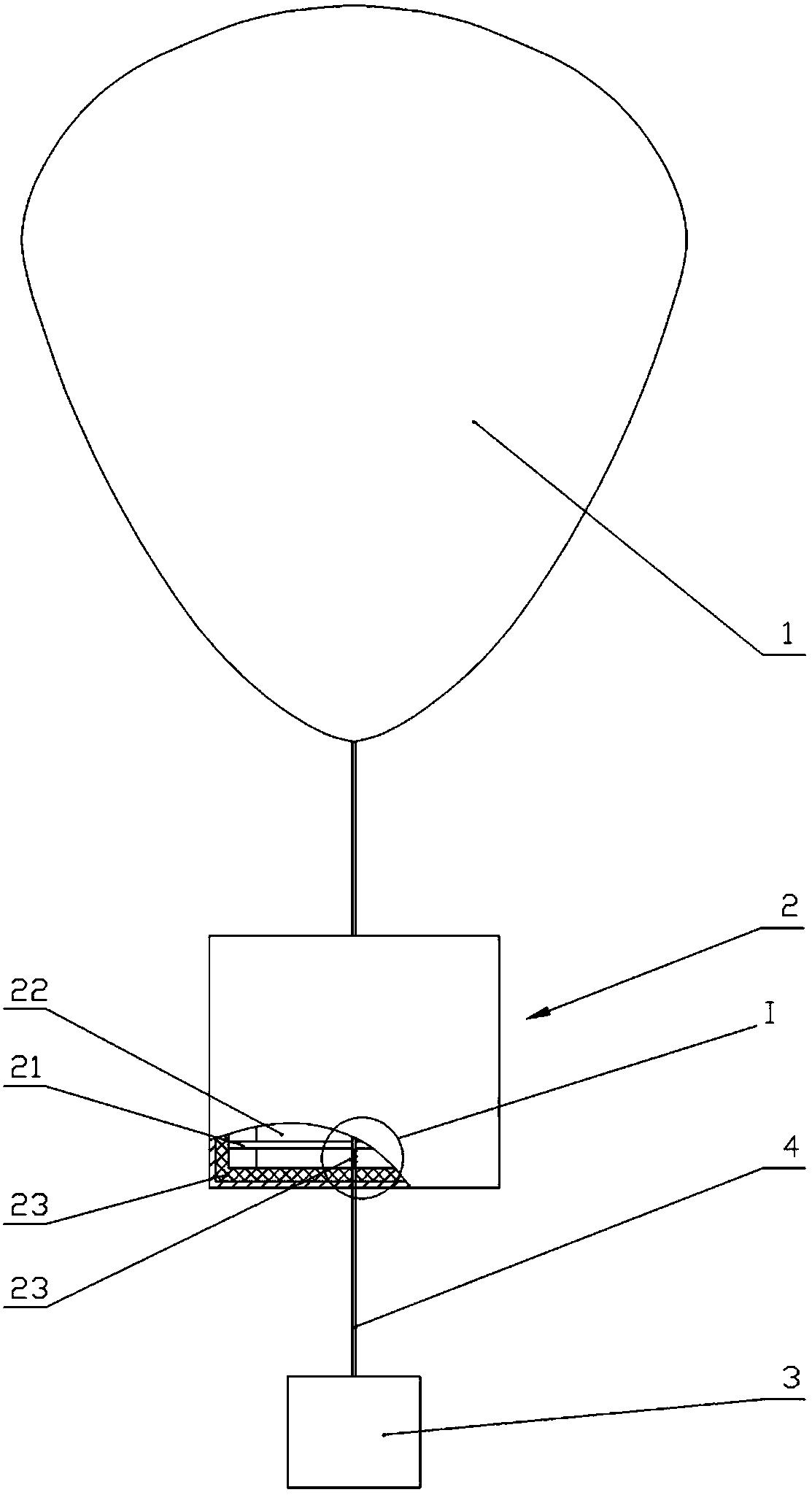
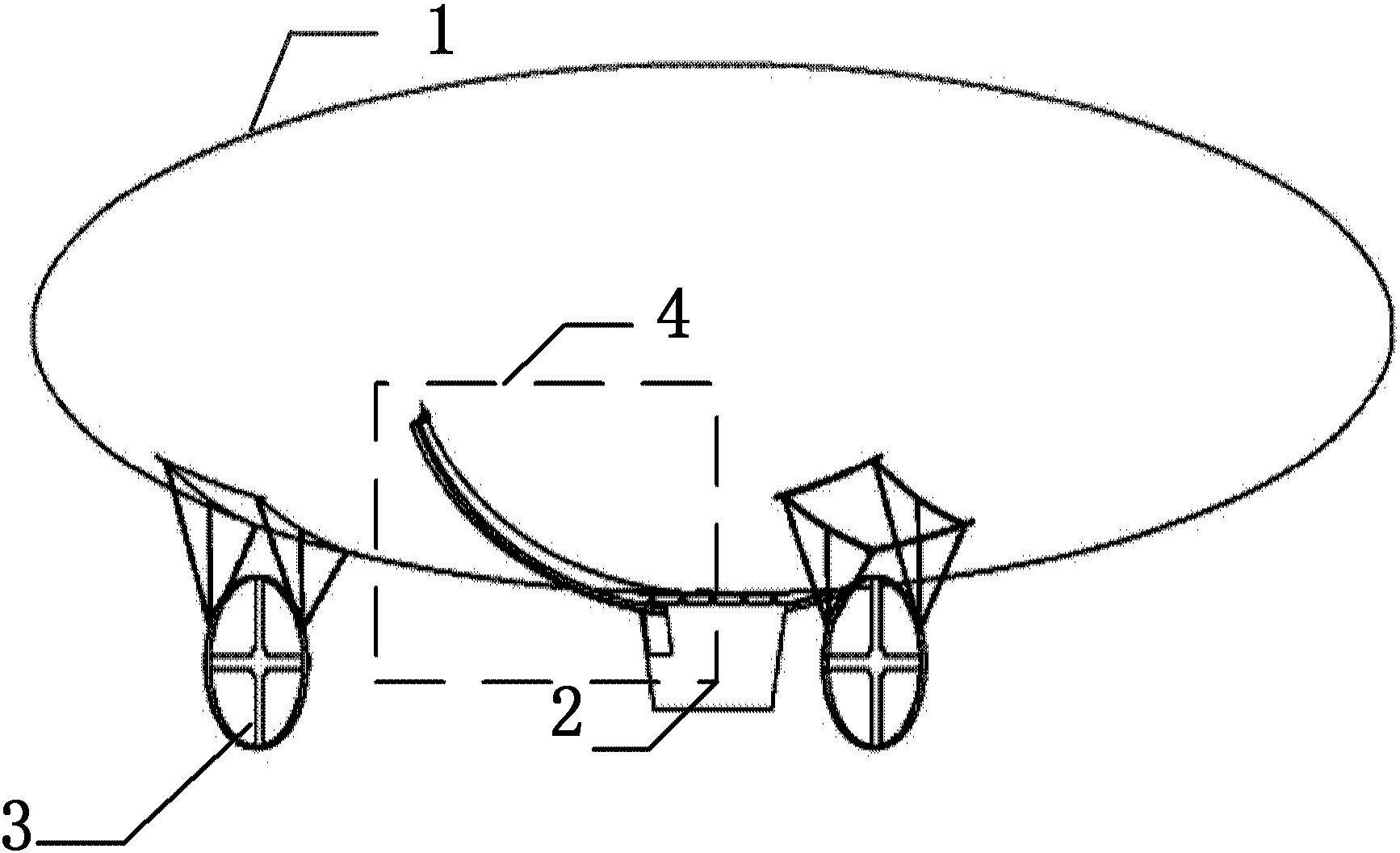
图1为本实用新型优选实施例一的布置示意图。
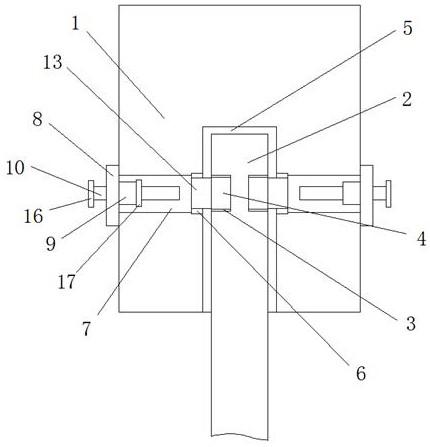
图2为图1中荷载舱的放大示意图。
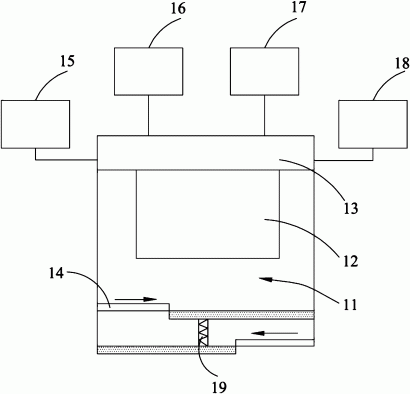
图3为本实施例中控制装置与执行元件的流程框图。
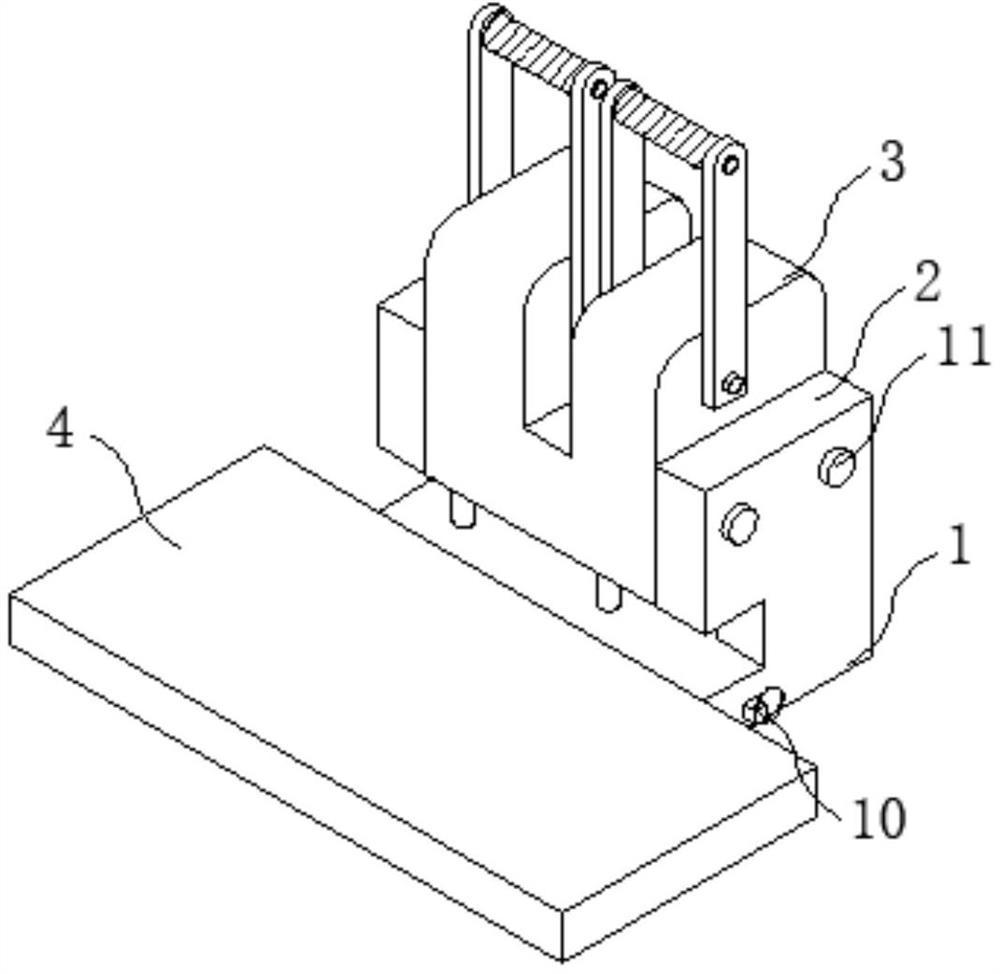
图4为图1中配重舱的放大示意图。
图5为本优选实施例中配重舱的替代方案的放大示意图。
图6为本优选实施例中配重舱的另一替代方案的放大示意图。
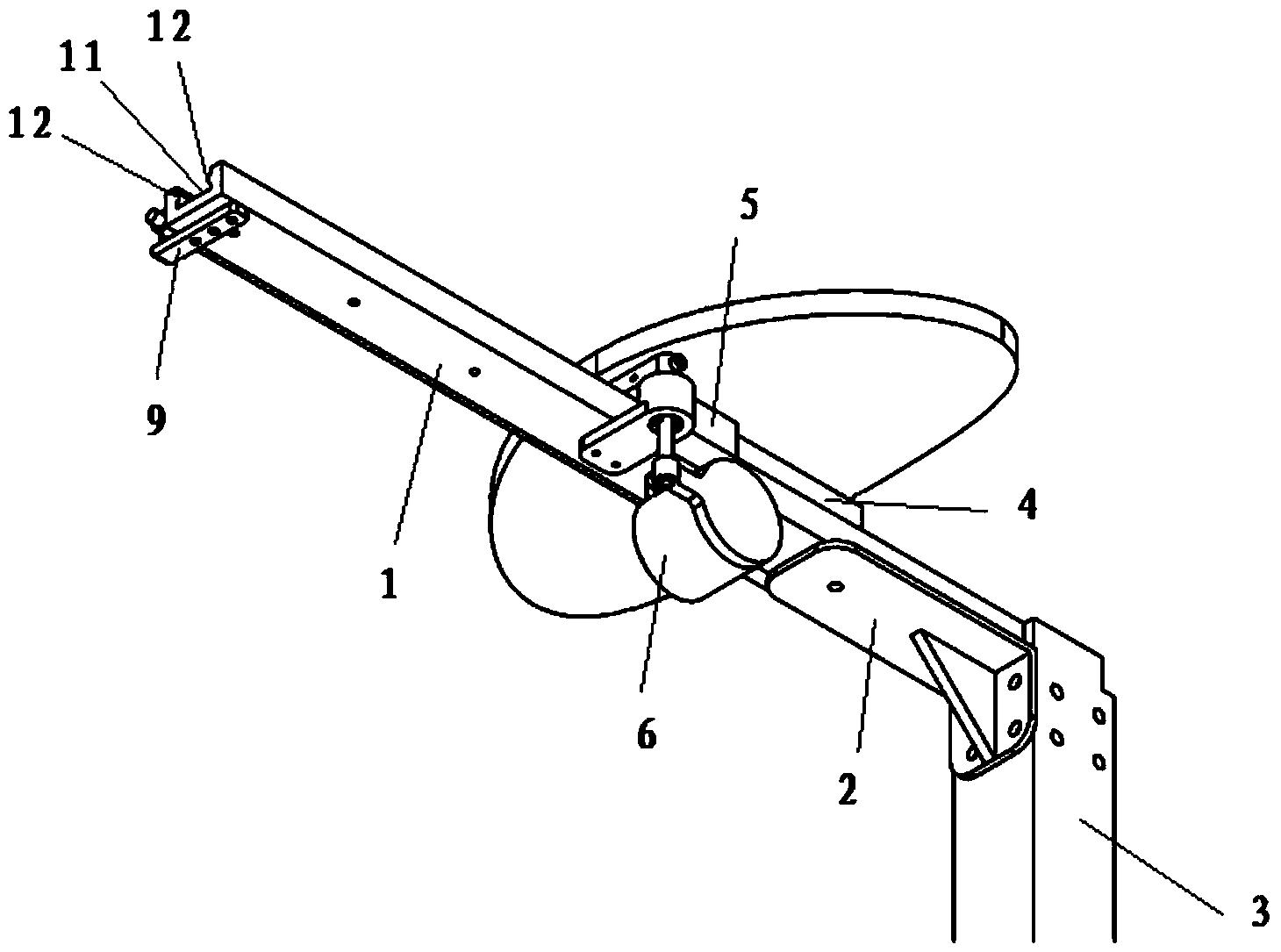
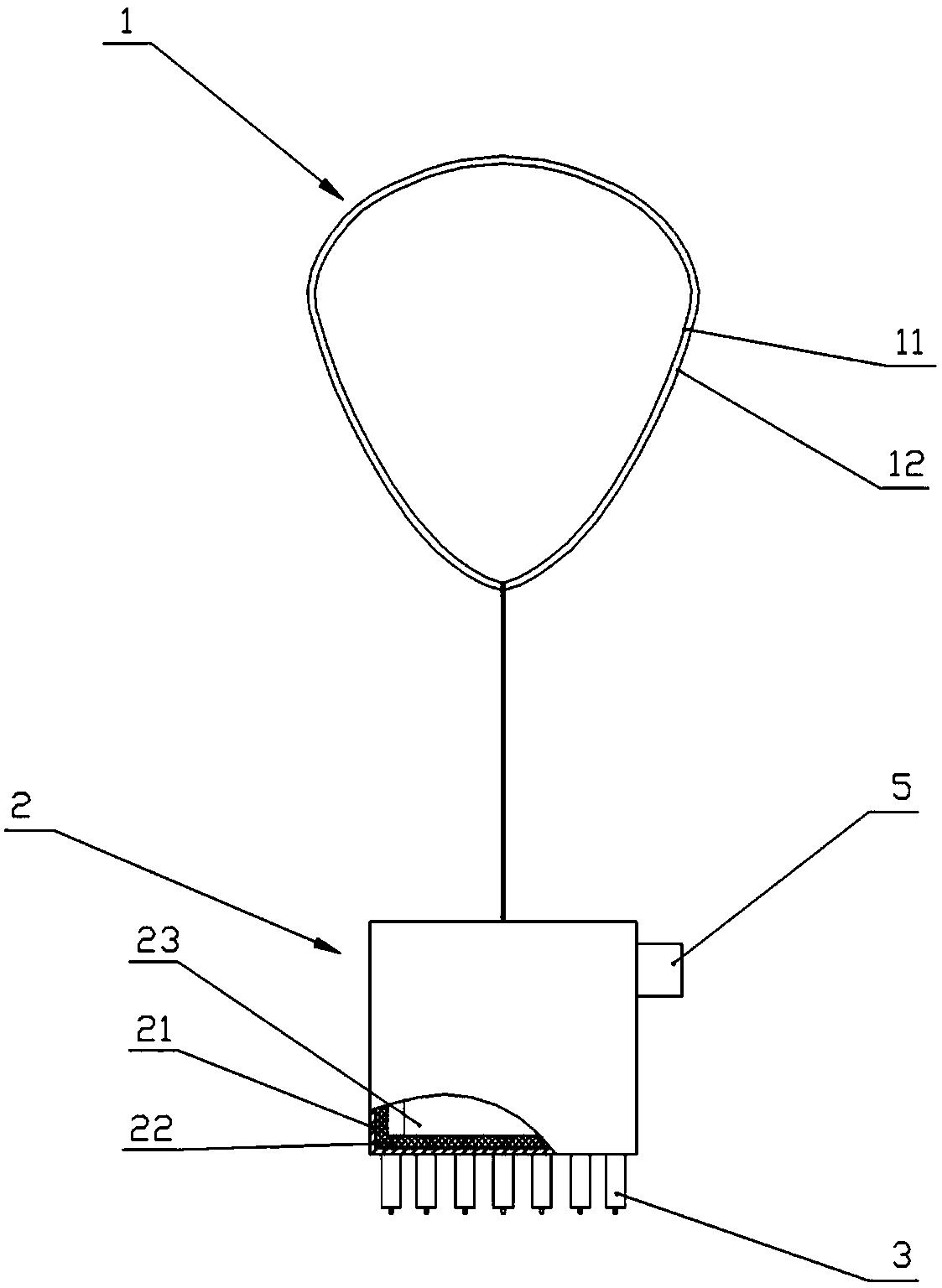
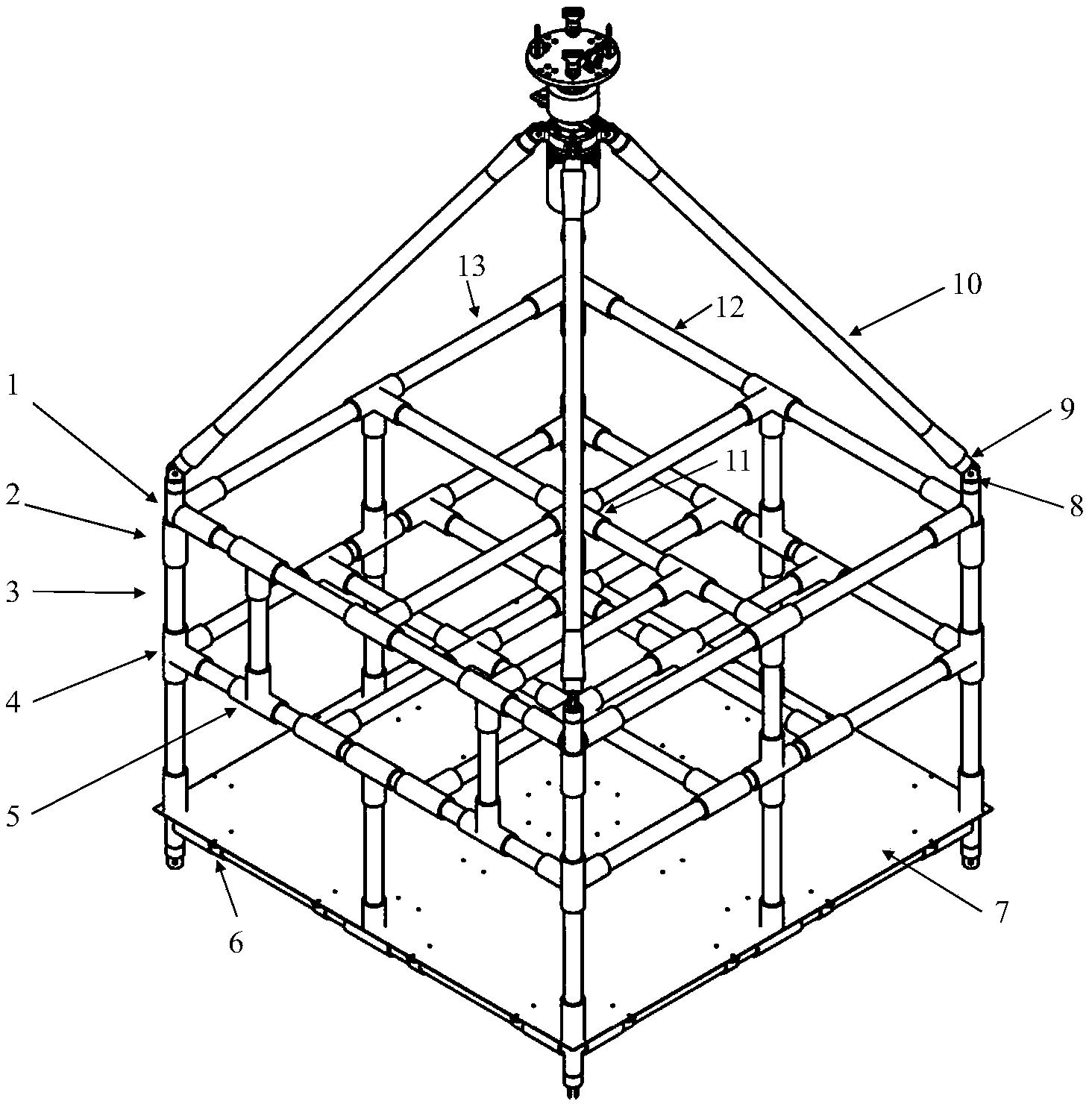
图7为本实用新型优选实施例二的布置示意图。
图8为图7中I处的放大示意图。
图示序号:
1—浮空主体,11—平衡球,12—动力球;
2—载荷舱;21—舱体,22—保温层,23—控制装置;
3—配重舱;4—系绳;5—回收伞;6—弹簧;7—电磁阀;8—电热熔丝;BPD
—爆破点;
01—浮空主体Ⅱ,011—平衡球Ⅱ,012—动力球Ⅱ,
013—释放机构,131—保温舱、132—挂杆、133—保温层。
具体实施方式
为了使本实用新型的目的,技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
优选实施一,如图1所示,本实施例提供的这种适用于临近空间的浮空器,它包括浮空主体1、载荷舱2和配重舱3。
浮空主体1包括平衡球11和套于平衡球外的动力球12,动力球和平衡球均选用为内充氢气或氦气的橡胶气球,当考虑成本因素时优选用氢气,当考虑安全因素时优选用氦气,动力球的临界体积小于平衡球的临界体积;载荷舱2通过系绳4悬挂于浮空主体下。
如图2所示,载荷舱2包括舱体21、保温层22以及设置于舱体内的控制装置23。保温层22的设置得以防止由于高空导致舱体内温度过低,保证控制装置的工作环境;控制装置包括电源、传感器和控制器;传感器有三个,一个为水平位移传感器,一个为竖向加速度传感器,还有一个为高度传感器,如图3所示,其中电源用于向回路供电,三个传感器和执行元件分别与控制器相连。初始时在控制器中设定加速度为竖直向下且高度一定时,执行元件工作;以及水平位移传感器检测到水平位移过大时,执行元件工作。舱体21外设有回收伞5,舱体的底部设有多个能够相互独立工作的配重舱3,各配重舱从上往下成串布置于载荷舱底面中心,或各配重舱并列均布于载荷舱的底面,或各配重舱串成多组后并列布置于载荷舱底面。
如图4所示,配重舱3为底部设有出液口的封闭筒,封闭筒内装有水作为压舱物,出液口设有电磁阀7作为执行元件,电磁阀与控制装置连通。配重舱外也设有回收伞,通过回收伞的设置以便防止回收物坠落速度过快损毁设备或意外伤人。
本实施例使用时首先给动力球和平衡球充气,对平衡球充至球内适量浮升气体,产生的浮力等于载荷舱与配重舱的重力和、大于载荷舱的重力,然后封口,接着对动力球进行充气,使其产生的浮力可带动整个装置稳定上升。然后解除限制,本装置上升,上升过程中由于外部气压减小,动力球和平衡球体积扩大,由于平衡球的临界体积大于动力球的临界体积,在一定高度时动力球爆炸,此时整个装置的重力大于浮力,装置回落,此时加速度传感器检测到加速度向下,同时高度传感器检测到本装置回落至设定高度(设定高度位于零风层内),控制器控制电磁阀打开,配重舱内水流出,至平衡球的浮力等于整个装置的重力,此时整个装置的加速度为零,控制器控制电磁阀关闭,在空气阻力的作用下整个装置的速度也会渐变为零,实现在高空中驻留。驻留后,在零风层水平风的作用下浮空器水平漂移,当检测到水平位移过大时控制配重舱内水流出,重力小于浮力,浮空器继续上浮,上浮至零风层中水平风风向相反高度位置处,此时由于反向风作用浮空器回漂,水平位移减小,控制配重舱停止释放,在空气阻力作用下,浮空器速度渐变为零重新实现驻留,保证其水平位移不超出所允许的最大位移。
如图5所示,作为替代方案,本实施例中还可以将配重舱3设置为包括底部开口的圆筒和设置于开口处的筒盖,筒盖的一端铰接于圆筒上、非铰接端设有弹簧6,弹簧的另一端通过系绳4与圆筒的内壁相连,系绳选用为橡胶绳,弹簧处于拉伸状态;将执行元件设计为能够熔断橡胶绳的热熔丝8,当选用热熔丝时可在热熔丝外设置能够隔热的碳纤维布,以保证熔断的可靠性。或者执行元件选用为弹簧刀,通过弹簧刀切断橡胶绳来实现筒盖的开启。
如图6所示,作为另一替代方案,还可以使配重舱包括连为一体的上壳和底盖,上壳与底盖的拼接处设有爆破点BPD,将执行元件选用为设置于爆破点处的电雷管。
本实施例的调控方法为:首先在放飞本浮空器前,放飞气象气球,测得我国零风层水平方向主流风向为东西向,且东风和西风的界限高度为21Km,21km以下西风为主风向,以上东风为主风向;然后在控制器内设定浮空器需要驻留的预定区域位于零风层21km以下区域,预定区域为圆柱型区域,其半径为最远水平距离,其底面为零风层的最小高度面、顶面为21Km的高度面;接着放飞本浮空器,放飞后浮空器上浮至动力球爆炸,爆炸后浮空器回落,利用传感器确定浮空器是否回落至预定区域;回落至预定区域后控制配重舱卸载,降低自重,卸载至竖向加速度为零后停止卸载,在空气阻力的作用下浮空器速度渐变为零,实现驻留;驻留后,在零风层当前风力作用下,浮空器水平漂移,利用传感器确定浮空器的水平位移,当水平位移过大,控制器控制配重舱释放压舱物,使浮空器上浮至零风层中21km以上区域内,在水平方向由于反向风作用浮空器回漂,在高度方向由于空气阻力的作用浮空器实现驻留,使浮空器驻留与预定区域内。
优选实施二,如图7、图8所示,本实施例与优选实施例一的区别在于:浮空主体Ⅱ01包括平衡球Ⅱ011和套于平衡球Ⅱ外的动力球Ⅱ012,动力球Ⅱ与平衡球Ⅱ之间设有释放机构013,平衡球Ⅱ的浮力小于载荷舱与配重舱的重力之和。其中释放机构013包括保温舱131和设置于保温舱内的挂杆132及实施例一中的控制装置23,保温层舱内壁设有能够避免控制装置在低温下工作的保温层133。平衡主体的顶部通过橡胶绳绕接于挂杆上,橡胶绳外绕有电热熔丝作为释放的执行元件。
本实施例使用时首先给动力球和平衡球充气,对平衡球充至球内适量浮升气体,产生的浮力小于载荷舱与配重舱的重力和,然后封口,接着对动力球进行充气,使其产生的浮力可带动整个装置稳定上升。
本实施例在放飞本浮空器前放飞气象气球,测得我国零风层水平方向主流风向为东西向,且东风和西风的界限高度为21Km,21km以下西风为主风向,以上东风为主风向;然后在控制器内设定浮空器需要驻留的预定区域位于零风层21km以下区域,预定区域为圆柱型区域,其半径为最远水平距离,其底面为零风层的最小高度面、顶面为21Km的高度面;放飞浮空器,浮空器上浮至预定区域,控制释放机构工作,使平衡球与从保温舱的底部分离,此时整个装置的浮力不大于重力,装置回落,回落时传感器检测到加速度方向的为向下,同时高度传感器检测到本装置回落至设定高度,控制器控制电磁阀打开,配重舱内水流出,至平衡球的浮力等于整个装置的重力,此时整个装置的加速度为零,控制器控制电磁阀关闭,在空气阻力的作用下装置的速度也会渐变为零,实现在高空中驻留;驻留后,在零风层当前风力作用下,浮空器水平漂移,利用传感器确定浮空器的水平位移,当水平位移过大,控制器控制配重舱释放压舱物,使浮空器上浮至零风层中21km以上的区域内,在水平方向由于反向风作用浮空器回漂,在高度方向由于空气阻力的作用浮空器实现驻留,使浮空器驻留与预定区域内。
本实用新型在放飞后,由传感器监测实时工况,并将数据反馈至控制器,通过调节浮空主体的浮力与配重舱的自重实现竖直方向上力的平衡,实现高空驻留;驻留后,在零风层当前风力作用下,浮空器水平漂移,利用传感器确定浮空器的水平位移,当水平位移过大,控制器控制配重舱释放压舱物,使浮空器上浮至零风层中与初驻留时风向相反的区域内,在水平方向由于反向风作用浮空器回漂,在高度方向由于空气阻力的作用浮空器实现驻留,使浮空器驻留与预定区域内。从而能够防止本浮空器出现大距离的横向漂移现象。
适用于临近空间的浮空器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0