








专利摘要
面向可变形轮足机器人的快速变形和低重心系统与方法,包括可变形机械本体和自主导航行走系统,所述可变形机械本体的前轮组和后轮组可由前后串行轮形式变形为左右并行轮形式并锁定,所述可变形机械本体的前轮组和后轮组也可由左右并行轮的形式变形为前后串行轮的形式并锁定,所述自主导航行走系统位于可变形机械本体上。快速变形系统可在短时间(10s)内,完成从前后串行轮到左右并行轮,或从左右并行轮到前后串行轮的变形转换,提高了变形过程的实用性。低重心系统可在变形后使轮足机器人机械骨架重心在轮毂中心以下,行走过程能耗小,自行走续航时间长,爬坡角度大。
权利要求
1.面向可变形轮足机器人的快速变形和低重心系统,其特征在于,包括可变形机械本体和自主导航行走系统,所述可变形机械本体的前轮组和后轮组可由前后串行轮形式变形为左右并行轮形式并锁定,所述可变形机械本体的前轮组和后轮组也可由左右并行轮的形式变形为前后串行轮的形式并锁定,所述自主导航行走系统位于可变形机械本体上,所述自主导航行走系统包括控制系统、动力系统、交互系统、电源系统、无线通信系统和卫星定位系统,所述控制系统分别与交互系统、动力系统、电源系统、无线通信系统和卫星定位系统电连接;
可变形机械本体包括前轮组、后轮组、刹车器和机械骨架,所述后轮组通过后轴与机械骨架的后叉一端相连,所述前轮组通过前轴与机械骨架的前叉一端相连,所述机械骨架的前轮组和机械骨架的后轮组上均设置有刹车器,所述前轮组的前轴上的前轮电机和后轮组的后轴上的后轮电机均与控制系统的控制器相连,所述机械骨架包括快速变形机械骨架和低重心机械骨架;
所述快速变形机械骨架包括曲柄中轴传动机构Ⅰ、座管Ⅰ、后叉Ⅰ、中间连接管Ⅰ、折叠变形锁定装置、中间连接管Ⅱ、头管Ⅰ、前叉上管Ⅰ、前叉Ⅰ、前轮变形锁定装置、可变形车把、套转变形锁定装置、连管、车座Ⅰ、蓄电池、平衡轮连接管、平衡轮、脚踏Ⅰ、第二电机、第三电机、第一动力轮和第二动力轮,所述曲柄中轴传动机构Ⅰ的中轴安装管分别与座管Ⅰ、后叉Ⅰ和中间连接管Ⅰ一端相连,所述中间连接管Ⅰ另一端通过折叠变形锁定装置与中间连接管Ⅱ一端相连,中间连接管Ⅱ另一端与头管Ⅰ相连,所述头管Ⅰ内穿插有前叉上管Ⅰ,前叉上管Ⅰ与头管Ⅰ通过碗组相连,前叉上管Ⅰ通过前轮变形锁定装置与头管Ⅰ相连,前叉上管Ⅰ伸出头管Ⅰ一端设置有可变形车把,前叉上管Ⅰ另一端通过套转变形锁定装置与前叉Ⅰ一端相连,前叉Ⅰ另一端与前轮组转动安装,所述座管Ⅰ中部与连管一端相连,连管另一端与后叉Ⅰ另一端相连,所述座管Ⅰ另一端设置有车座Ⅰ,座管Ⅰ靠近车座Ⅰ一端外圆面通过平衡轮连接管设置有平衡轮,所述曲柄中轴传动机构Ⅰ的曲柄上设置有脚踏Ⅰ,所述前叉Ⅰ通过其上的基座固定安装有第二电机,第二电机输出轴设置有与前轮组中的前轮相配合的第一动力轮,所述后叉通过其上的基座固定安装有第三电机,第三电机和第二电机分别与控制系统的控制器相连,第三电机输出轴设置有与后轮组的后轮相配合的第二动力轮,所述座管Ⅰ、后叉Ⅰ、中间连接管Ⅰ、中间连接管Ⅱ、头管Ⅰ、前叉上管Ⅰ、前叉Ⅰ和连管管内均设置有蓄电池,交互系统、 控制系统中的控制器、无线通信系统、卫星定位系统可设于车体骨架内或车体骨架上;
所述低重心机械骨架包括前叉Ⅱ、前叉Ⅲ、脚踏Ⅰ、前叉上管Ⅱ、前叉上管Ⅲ、头管Ⅱ、中间连接管Ⅲ、中间连接管Ⅳ、中间连接管Ⅴ、座管Ⅱ、座管Ⅲ、后叉Ⅴ、曲柄中轴传动机构Ⅱ、后叉Ⅱ、后叉Ⅲ、后叉Ⅳ、可变形车把、前轮变形锁定装置、八个折叠变形锁定装置、四个套转变形锁定装置、锥齿轮传动机构、发电机构、蓄电池、车座Ⅱ和折叠脚踏,所述中间连接管Ⅲ一端与头管Ⅱ外壁相连,头管Ⅱ内穿插有前叉上管Ⅱ,且前叉上管Ⅱ通过前轮变形锁定装置与头管Ⅱ相连,前叉上管Ⅱ一端伸出头管Ⅱ一端部分设置有可变形车把,可变形车把的固定把两端通过第八折叠变形锁定装置与折叠把相连,前叉上管Ⅱ另一端伸出头管Ⅱ另一端部分与前叉上管Ⅲ一端通过第一折叠变形锁定装置相连,前叉上管Ⅲ另一端通过第二折叠变形锁定装置与前叉Ⅱ一端相连,前叉Ⅱ另一端通过第一套转变形锁定装置与前叉Ⅲ一端相连,前叉Ⅲ另一端与前轮组转动安装,所述中间连接管Ⅲ与中间连接管Ⅳ一端通过第三折叠变形锁定装置相连,所述中间连接管Ⅳ另一端与中间连接管Ⅴ一端通过第四折叠变形锁定装置相连,中间连接管Ⅴ另一端与座管Ⅱ外壁相连,座管Ⅱ一端设置有车座Ⅱ,座管Ⅱ另一端通过第二套转变形锁定装置与座管Ⅲ一端相连,曲柄中轴传动机构Ⅱ的两个曲柄上均设置有折叠脚踏,曲柄上安装有第四套转变形锁定装置,所述座管Ⅲ另一端通过第五折叠变形锁定装置与后叉Ⅱ相连,所述后叉Ⅱ一端固定安装在所述曲柄中轴传动机构Ⅱ的中轴安装管外圆面上,后叉Ⅱ另一端通过第六折叠变形锁定装置与后叉Ⅲ一端相连,后叉Ⅲ另一端通过第七折叠变形锁定装置与后叉Ⅳ一端相连,后叉Ⅳ另一端通过第三套转变形锁定装置与后叉Ⅴ一端相连,后叉Ⅴ另一端与后轮组的后轴相连,后轮组与曲柄中轴传动机构Ⅱ的中轴通过锥齿轮传动机构或快拆链条机构相连,或所述曲柄中轴传动机构Ⅱ中轴安装管外圆面底端设置有发电机构,所述前叉Ⅱ、前叉Ⅲ、前叉上管Ⅱ、前叉上管Ⅲ、头管Ⅱ、中间连接管Ⅲ、中间连接管Ⅳ、中间连接管Ⅴ、座管Ⅱ、座管Ⅲ、后叉Ⅴ、后叉Ⅱ、后叉Ⅲ和后叉Ⅳ的管内均设置有蓄电池,交互系统、 控制系统中的控制器、无线通信系统、卫星定位系统可设于车体骨架内或车体骨架上;
所述锥齿轮传动机构包括锥齿轮Ⅰ、锥齿轮Ⅱ、连杆Ⅰ、十字型连接键、连杆Ⅱ、连杆Ⅲ、减速器、第四电机和丝杆,所述锥齿轮Ⅰ套设于曲柄中轴传动机构Ⅱ的中轴外圆面上,所述锥齿轮Ⅰ与连杆Ⅰ一端锥齿啮合,连杆Ⅰ和连杆Ⅱ沿轴向均开设有十字孔,连杆Ⅱ与连杆Ⅰ之间通过十字形连接键相连,且十字形连接键与连杆Ⅰ和连杆Ⅱ上的十字孔配合,所述十字形连接键的中心开设有螺纹孔,连杆Ⅱ的十字孔末端的连杆Ⅱ内设置有第四电机和减速器,第四电机通过减速器与丝杆一端相连,丝杆另一端与十字形连接键上的螺纹孔配合,连杆Ⅱ另一端与连接杆Ⅲ一端焊接,连接杆Ⅲ另一端的锥齿与位于后轮组后轴上的锥齿轮Ⅱ啮合,所述第四电机与控制系统的控制器相连。
2.根据权利要求1所述的面向可变形轮足机器人的快速变形和低重心系统,其特征在于:折叠变形锁定装置包括转动杆Ⅰ、转动杆Ⅱ、转动轴、卡槽、第一电磁铁、第一限位板和第一弹簧,转动杆Ⅰ一端的圆盘位于转动杆Ⅱ一端对称设置的圆盘之间且通过转动轴转动安装,转动杆Ⅰ一端的圆盘上开设有若干卡槽,转动杆Ⅱ对称设置的圆盘之间设置有第一电磁铁,且第一电磁铁的牵引杆与卡槽配合,所述牵引杆上设置有第一限位板,第一限位板与第一电磁铁之间设置有第一弹簧,第一电磁铁分别与控制系统的控制器和蓄电池相连。
3.根据权利要求1所述的面向可变形轮足机器人的快速变形和低重心系统,其特征在于:套转变形锁定装置包括转动管Ⅰ、转动管Ⅱ、锁定孔、第二电磁铁、驱动杆、第二限位板、第二弹簧、推杆、锁孔、压缩弹簧、连接块和推块,所述转动管Ⅰ一端与转动管Ⅱ一端转动安装,转动管Ⅱ侧壁开设有锁定孔,锁定孔内设置有连接块,转动管Ⅱ内设置有与转动管Ⅱ轴向重合的第二电磁铁,第二电磁铁上设置有与第二电磁铁中心线重合设置的驱动杆,驱动杆一端外表面设置有第二限位板,第二限位板与第二电磁铁之间设置有第二弹簧,驱动杆另一端与推杆相连,所述转动管Ⅰ内壁开设有若干锁孔,锁孔孔底与压缩弹簧一端相连,压缩弹簧另一端设置有与连接块配合的推块,第二电磁铁与控制系统的控制器和蓄电池相连。
4.根据权利要求1所述的面向可变形轮足机器人的快速变形和低重心系统,其特征在于:所述前轮变形锁定装置包括头管连接板、前叉上管连接板、连接杆、旋转手柄、锁舌和第三弹簧,所述头管连接板套设在头管外圆面上,所述前叉上管连接板套设在前叉上管外圆面上,所述连接杆贯穿前叉上管连接板通孔,且连接杆底端与锁舌固定安装,锁舌穿过头管连接板上的孔与头管连接板配合,连接杆顶端伸出前叉上管连接板部分设置有旋转手柄,前叉上管连接板与锁舌之间设置有第三弹簧,且第三弹簧套设在连接杆上。
5.根据权利要求1所述的面向可变形轮足机器人的快速变形和低重心系统,其特征在于:所述发电机构包括固定座,所述固定座内腔设置有滤波器、整流器和发电机,发电机输出轴贯穿固定座部分套设有与锥齿轮Ⅰ啮合的小锥齿轮,所述发电机、整流器、滤波器和蓄电池依次相连,所述蓄电池通过变压芯片与控制系统的控制器相连。
说明书
技术领域
本发明属于电子信息、机器视觉、自动控制和机械设计技术领域,具体涉及面向可变形轮足机器人的快速变形和低重心系统与方法。
背景技术
人类用大脑进行思考,用眼睛观察外部的环境,用双手改造周围的世界,用双脚在地球表面行走。自从文明产生以后,人类一直渴望制造大脑、双手、双脚,甚至双眼、双耳的替代品,更大程度解放自己身体。1785年英国人瓦特发明了新式蒸汽机,手工劳动逐渐被机器生产取代。1886年,德国人卡尔. 本茨发明汽车,人的身体可以被机器移动。1946年第一台通用电子管计算机在美国宾西法尼亚大学诞生,机器可以代替人脑进行逻辑思维和数学运算。但永不满足似乎是人类的天形,科学家一直试图制造外形类人,有想、看、听、说能力,可与人进行情感交流并帮助人类的人形机器人。类人机器设计与实现将是人类在21世纪最激动人心的重大科技目标。
快速发展的材料、能源、电子、机械和信息技术,为制造出外形类人,功能接近或超过人类的机器提供了可能。日本Honda的Asimo是全球最早具备人类双足行走能力的人形机器人。 美国Agility Robotics设计的Cassie,Boston Dynamics设计的Atlas足式机器人,在动作的灵活协调程度上已超过Asimo。中国香港Hanson Robotics 开发的Sophia在模仿人类表情和语音沟通方面达到了一定的高度。Cassie、Atlas、Sophia等机器人在一定程度上代表了人类在21世纪初仿人机器人的方面的较高研究水平。但仔细思考发现,目前的人形机器人,具有的手脚运动,以及视、听、说能力,主要以满足其自身的存在为目的,在帮助人方面,还与单一功能机器,如洗衣服的洗衣机,运输的汽车、计算的电脑存在差距。因造价、实用形等原因,此类仿人机器人距离进入人类社会尚有很远的路要走。
具备人的看、听、说交流功能,外形轻巧、同时能帮助人完成重要任务的机器人(在帮助人类完成任务的同时,以人类感到亲切的外形,以人类熟悉的方式进行交流的机器人),更有可能尽早走进人类的生活。18世纪末产生的小巧、轻便双轮单车是一种可以充分发挥人类自身运动能力的实用机械,在全世界范围内汽车趋于普及的今天,单车在近距出行方面,长距离探险方面仍具有其不可替代的存在价值。为了克服私有单车携带存放不便的问题,公用单车出现并有商业推广。安装了GPS定位芯片的无桩共享单车曾经在2016年迅速在中国中心城市向周边城市发展,在2017年达到峰值。但随之出现的系列问题,使该类单车发展在2018年出现阴影。
无序停放是制约共享单车发展的最大瓶颈。使用者到达目的地后随意将车辆停放,不正确的停车挤占了人行道,公共出入口,盲道,影响了正常交通,破坏了城市市容。因停放地点没有规律,也出现了使用者在急需时找不到共享单车的情况。GPS定位共享单车陷入困境的背后,表面上是用车人员的素质有待提高,其背后的根本问题是现有的单车的技术本质仍停留在最初的发明阶段,是一个冰冷的、能力有限的两轮载人机械。与具备视听说能力,可自主行动和思考的类人机器人相差甚远,还不能满足人类更高的便捷使用(自动返回)和心理交流需要。特别是,如果为现有的单车简单集成视、听、说和自动导航行走系统,其自主行走可靠形、稳定形方面存在严重缺陷。
综上所述,为了克服现有单车不能自主返回的问题,同时也是为了弥补目前缺少一种既能帮助人类运载身体(有实用形),又具备看、听、说能力(人机交互形好),有趣味的(趣味形是人生追求的最重要目标之一)机器人,本发明提出面向可变形轮足机器人的快速变形和低重心系统与方法。
发明内容
为了实现上述目的,本发明采用如下技术方案:
面向可变形轮足机器人的快速变形和低重心系统,包括可变形机械本体和自主导航行走系统,所述可变形机械本体的前轮组和后轮组可由前后串行轮形式变形为左右并行轮形式并锁定,所述可变形机械本体的前轮组和后轮组也可由左右并行轮的形式变形为前后串行轮的形式并锁定,所述自主导航行走系统位于可变形机械本体上,所述自主导航行走系统包括控制系统、动力系统、交互系统、电源系统、无线通信系统和卫星定位系统,所述控制系统分别与交互系统、动力系统、电源系统、无线通信系统和卫星定位系统电连接。
所述可变形机械本体包括前轮组、后轮组、刹车器和机械骨架,所述后轮组通过后轴与机械骨架后叉一端相连,所述前轮组通过前轴与机械骨架的前叉一端相连,所述机械骨架的前轮组和机械骨架的后轮组上均设置有刹车器,所述前轮组的前轴上的前轮电机和后轮组的后轴上的后轮电机均与控制系统的控制器相连,所述机械骨架包括快速变形机械骨架和低重心机械骨架。
所述快速变形机械骨架包括曲柄中轴传动机构Ⅰ、座管Ⅰ、后叉Ⅰ、中间连接管Ⅰ、折叠变形锁定装置、中间连接管Ⅱ、头管Ⅰ、前叉上管Ⅰ、前叉Ⅰ、前轮变形锁定装置、可变形车把、套转变形锁定装置、连管、车座Ⅰ、蓄电池、平衡轮连接管、平衡轮、脚踏Ⅰ、第二电机、第三电机、第一动力轮和第二动力轮,所述曲柄中轴传动机构Ⅰ的中轴安装管分别与座管Ⅰ、后叉Ⅰ和中间连接管Ⅰ一端相连,所述中间连接管Ⅰ另一端通过折叠变形锁定装置与中间连接管Ⅱ一端相连,中间连接管Ⅱ另一端与头管Ⅰ相连,所述头管Ⅰ内穿插有前叉上管Ⅰ,前叉上管Ⅰ与头管Ⅰ通过碗组相连,前叉上管Ⅰ通过前轮变形锁定装置与头管Ⅰ相连,前叉上管Ⅰ伸出头管Ⅰ一端设置有可变形车把,前叉上管Ⅰ另一端通过套转变形锁定装置与前叉Ⅰ一端相连,前叉Ⅰ另一端与前轮组转动安装,所述座管Ⅰ中部与连管一端相连,连管另一端与后叉Ⅰ另一端相连,所述座管Ⅰ另一端设置有车座Ⅰ,座管Ⅰ靠近车座Ⅰ一端外圆面通过平衡轮连接管设置有平衡轮,所述曲柄中轴传动机构Ⅰ的曲柄上设置有脚踏Ⅰ,所述前叉Ⅰ通过其上的基座固定安装有第二电机,第二电机输出轴设置有与前轮组中的前轮相配合的第一动力轮,所述后叉通过其上的基座固定安装有第三电机,第三电机和第二电机分别与控制系统的控制器相连,第三电机输出轴设置有与后轮组的后轮相配合的第二动力轮,所述座管Ⅰ、后叉Ⅰ、中间连接管Ⅰ、中间连接管Ⅱ、头管Ⅰ、前叉上管Ⅰ、前叉Ⅰ和连管管内均设置有蓄电池,交互系统、控制系统中的控制器、无线通信系统、卫星定位系统可设于车体骨架内或车体骨架上。
折叠变形锁定装置包括转动杆Ⅰ、转动杆Ⅱ、转动轴、卡槽、第一电磁铁、第一限位板和第一弹簧,转动杆Ⅰ一端圆盘位于转动杆Ⅱ一端对称设置的圆盘之间且通过转动轴转动安装,转动杆Ⅰ一端圆盘上开设有若干卡槽,转动杆Ⅱ对称设置的圆盘之间设置有第一电磁铁,且第一电磁铁的牵引杆与卡槽配合,所述牵引杆上设置有第一限位板,第一限位板与第一电磁铁之间设置有第一弹簧,第一电磁铁分别与控制系统的控制器和蓄电池相连。
套转变形锁定装置包括转动管Ⅰ、转动管Ⅱ、锁定孔、第二电磁铁、驱动杆、第二限位板、第二弹簧、推杆、锁孔、压缩弹簧、连接块和推块,所述转动管Ⅰ一端与转动管Ⅱ一端转动安装,转动管Ⅱ侧壁开设有锁定孔,锁定孔内设置有连接块,转动管Ⅱ内设置有与转动管Ⅱ轴向重合的第二电磁铁,第二电磁铁上设置有与第二电磁铁中心线重合设置的驱动杆,驱动杆一端外表面设置有第二限位板,第二限位板与第二电磁铁之间设置有第二弹簧,驱动杆另一端与推杆相连,所述转动管Ⅰ内壁开设有若干锁孔,锁孔孔底与压缩弹簧一端相连,压缩弹簧另一端设置有与连接块配合的推块,第二电磁铁与控制系统的控制器和蓄电池相连。
所述前轮变形锁定装置包括头管连接板、前叉上管连接板、连接杆、旋转手柄、锁舌和第三弹簧,所述头管连接板套设在头管外圆面上,所述前叉上管连接板套设在前叉上管外圆面上,所述连接杆贯穿前叉上管连接板通孔,且连接杆底端与锁舌固定安装,锁舌穿过头管连接板上的孔与头管连接板配合,连接杆顶端伸出前叉上管连接板部分设置有旋转手柄,前叉上管连接板与锁舌之间设置有第三弹簧,且第三弹簧套设在连接杆上。
所述低重心机械骨架包括前叉Ⅱ、前叉Ⅲ、脚踏Ⅰ、前叉上管Ⅱ、前叉上管Ⅲ、头管Ⅱ、中间连接管Ⅲ、中间连接管Ⅳ、中间连接管Ⅴ、座管Ⅱ、座管Ⅲ、后叉Ⅴ、曲柄中轴传动机构Ⅱ、后叉Ⅱ、后叉Ⅲ、后叉Ⅳ、可变形车把、前轮变形锁定装置、八个折叠变形锁定装置、四个套转变形锁定装置、锥齿轮传动机构、发电机构、蓄电池、车座Ⅱ和折叠脚踏,所述中间连接管Ⅲ一端与头管Ⅱ外壁相连,头管Ⅱ内穿插有前叉上管Ⅱ,且前叉上管Ⅱ通过前轮变形锁定装置与头管Ⅱ相连,前叉上管Ⅱ一端伸出头管Ⅱ一端部分设置有可变形车把,可变形车把的固定把两端通过第八折叠变形锁定装置与折叠把相连,前叉上管Ⅱ另一端伸出头管Ⅱ另一端部分与前叉上管Ⅲ一端通过第一折叠变形锁定装置相连,前叉上管Ⅲ另一端通过第二折叠变形锁定装置与前叉Ⅱ一端相连,前叉Ⅱ另一端通过第一套转变形锁定装置与前叉Ⅲ一端相连,前叉Ⅲ另一端与前轮组转动安装,所述中间连接管Ⅲ与中间连接管Ⅳ一端通过第三折叠变形锁定装置相连,所述中间连接管Ⅳ另一端与中间连接管Ⅴ一端通过第四折叠变形锁定装置相连,中间连接管Ⅴ另一端与座管Ⅱ外壁相连,座管Ⅱ一端设置有车座Ⅱ,座管Ⅱ另一端通过第二套转变形锁定装置与座管Ⅲ一端相连,曲柄中轴传动机构Ⅱ的两个曲柄上均设置有折叠脚踏,曲柄上安装有第四套转变形锁定装置,所述座管Ⅲ另一端通过第五折叠变形锁定装置与后叉Ⅱ相连,所述后叉Ⅱ一端固定安装在所述曲柄中轴传动机构Ⅱ的中轴安装管外圆面上,后叉Ⅱ另一端通过第六折叠变形锁定装置与后叉Ⅲ一端相连,后叉Ⅲ另一端通过第七折叠变形锁定装置与后叉Ⅳ一端相连,后叉Ⅳ另一端通过第三套转变形锁定装置与后叉Ⅴ一端相连,后叉Ⅴ另一端与后轮组的后轴相连,后轮组与曲柄中轴传动机构Ⅱ的中轴通过锥齿轮传动机构或快拆链条机构相连,或所述曲柄中轴传动机构Ⅱ中轴安装管外圆面底端设置有发电机构,所述前叉Ⅱ、前叉Ⅲ、前叉上管Ⅱ、前叉上管Ⅲ、头管Ⅱ、中间连接管Ⅲ、中间连接管Ⅳ、中间连接管Ⅴ、座管Ⅱ、座管Ⅲ、后叉Ⅴ、后叉Ⅱ、后叉Ⅲ和后叉Ⅳ的管内均设置有蓄电池,交互系统、 控制系统中的控制器、无线通信系统、卫星定位系统可设于车体骨架内或车体骨架上。
所述锥齿轮传动机构包括锥齿轮Ⅰ、锥齿轮Ⅱ、连杆Ⅰ、十字型连接键、连杆Ⅱ、连杆Ⅲ、减速器、第四电机和丝杆,所述锥齿轮Ⅰ套设于曲柄中轴传动机构Ⅱ的中轴外圆面上,所述锥齿轮Ⅰ与连杆Ⅰ一端锥齿啮合,连杆Ⅰ和连杆Ⅱ沿轴向均开设有十字孔,连杆Ⅱ与连杆Ⅰ之间通过十字形连接键相连,且十字形连接键与连杆Ⅰ和连杆Ⅱ上的十字孔配合,所述十字形连接键的中心开设有螺纹孔,连杆Ⅱ的十字孔末端的连杆Ⅱ内设置有第四电机和减速器,第四电机通过减速器与丝杆一端相连,丝杆另一端与十字形连接键上的螺纹孔配合,连杆Ⅱ另一端与连接杆Ⅲ一端焊接,连接杆Ⅲ另一端的锥齿与位于后轮组后轴上的锥齿轮Ⅱ啮合,所述第四电机与控制系统的控制器相连。
所述发电机构包括固定座,所述固定座内腔设置有滤波器、整流器和发电机,发电机输出轴贯穿固定座部分套设有与锥齿轮Ⅰ啮合的小锥齿轮,所述发电机、整流器、滤波器和蓄电池依次相连,所述蓄电池通过变压芯片与控制系统的控制器相连。
本发明的有益效果为:
快速变形系统可在短时间(10s)内,完成从前后串行轮到左右并行轮,或从左右并行轮到前后串行轮的变形转换,提高了变形过程的实用性。低重心系统,可在变形后使轮足机器人机械骨架重心在轮毂中心以下,行走过程能耗小,自行走续航时间长,爬坡角度大。具有快速变形或低重心特性的自行走轮足机器人,在人不使用的情况下,可自动返回到指定地点,或自动跟随使用者,或陪伴使用者,是人类社新增加的一种外形和功能独特的机器人伙伴,并使人类社会更加有序。
附图说明
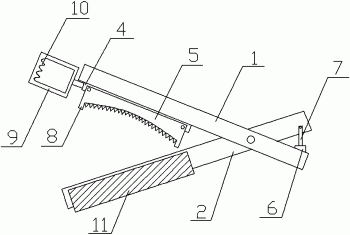
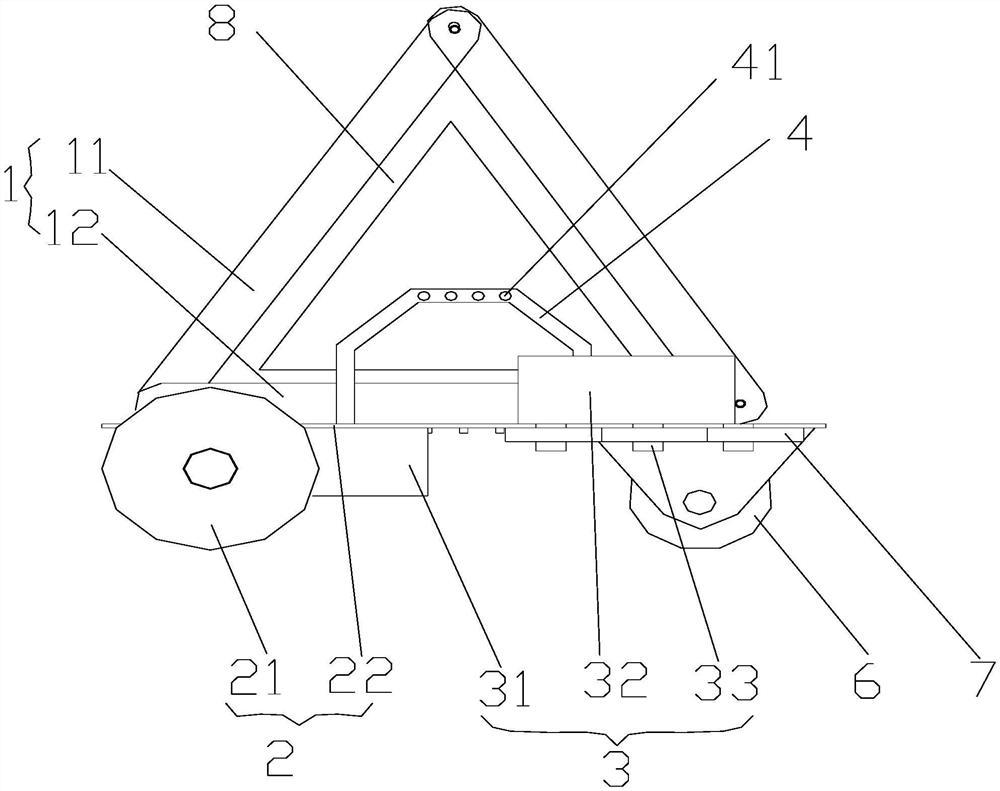
图1为本发明第二电机和第三电机驱动的快速变形机械骨架及前后轮组结构的正视图;
图2为本发明第二电机和第三电机驱动的快速变形机械骨架及前后轮组结构的侧视图;
图3为本发明第二电机和第三电机驱动的快速变形机械骨架及前后轮组结构的俯视图;
图4为本发明前轮电机和后轮电机驱动的快速变形机械骨架及前后轮组结构的正视图;
图5为本发明前轮电机和后轮电机驱动的快速变形机械骨架及前后轮组结构的侧视图;
图6为本发明前轮电机和后轮电机驱动的快速变形机械骨架及前后轮组结构的俯视图;
图7(a)为本发明折叠变形锁定装置锁定状态结构主视图;
图7(b)为本发明折叠变形锁定装置锁定状态结构剖视图;
图8(a)为本发明折叠变形锁定装置解锁状态结构主视图;
图8(b)为本发明折叠变形锁定装置解锁状态结构剖视图;
图9为本发明折叠变形锁定装置解锁并转动一定角度后再次进入锁定状态结构示意图;
图10为本发明套转变形锁定装置锁定状态轴向结构示意图;
图11为本发明套转变形锁定装置变形锁定过程的径向结构示意图,其中图11(a)为初始锁定状态示意图,图11(b)为初始解锁状态示意图,图11(c)为转动90度后的解锁状态示意图,图11(d)为转动90度后的锁定状态结构示意图;
图12为本发明前轮变形锁定装置解锁状态结构示意图,其中图12(a)为主视图,图12(b)为俯视图,图12(c)为仰视图;
图13为本发明前轮变形锁定装置旋转连接杆后结构示意图,其中图13(a)为主视图,图13(b)为俯视图,图13(c)为仰视图;
图14为本发明前轮变形锁定装置锁定状态结构示意图,其中图14(a)为主视图,图14(b)为俯视图,图14(c)为仰视图;
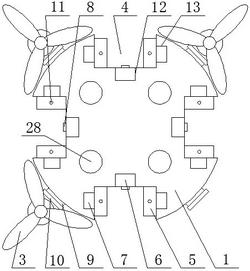
图15为本发明快速变形机械骨架变形锁定过程示意图;
图16为本发明快速变形机械骨架变形锁定过程俯视图;
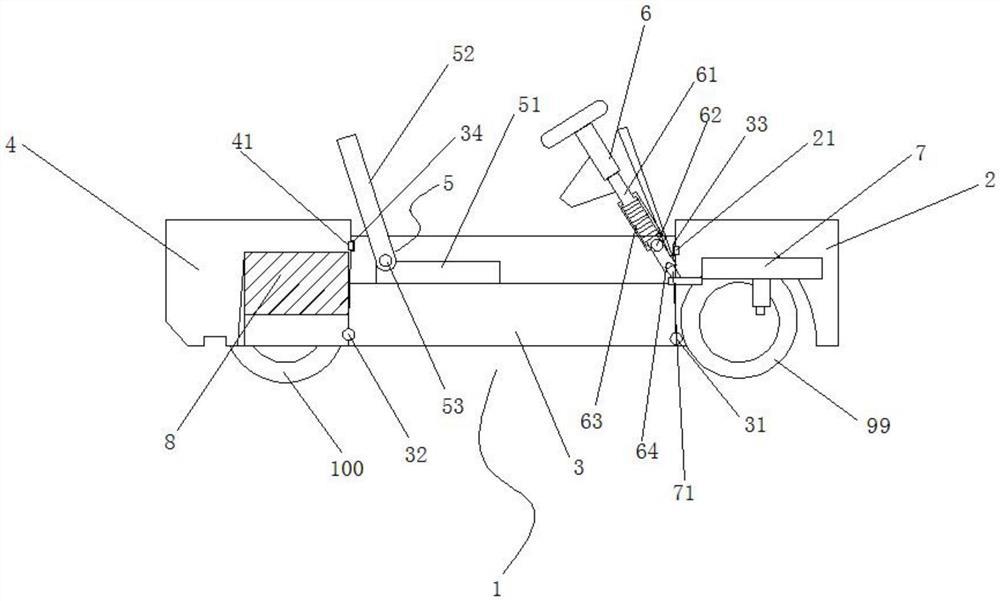
图17为本发明锥齿轮传动机构传动的低重心变形机械骨架及前后轮组结构正视图;
图18为本发明锥齿轮传动机构传动的低重心变形机械骨架及前后轮组结构俯视图;
图19为本发明发电机构传动的低重心变形机械骨架及前后轮组结构俯视图;
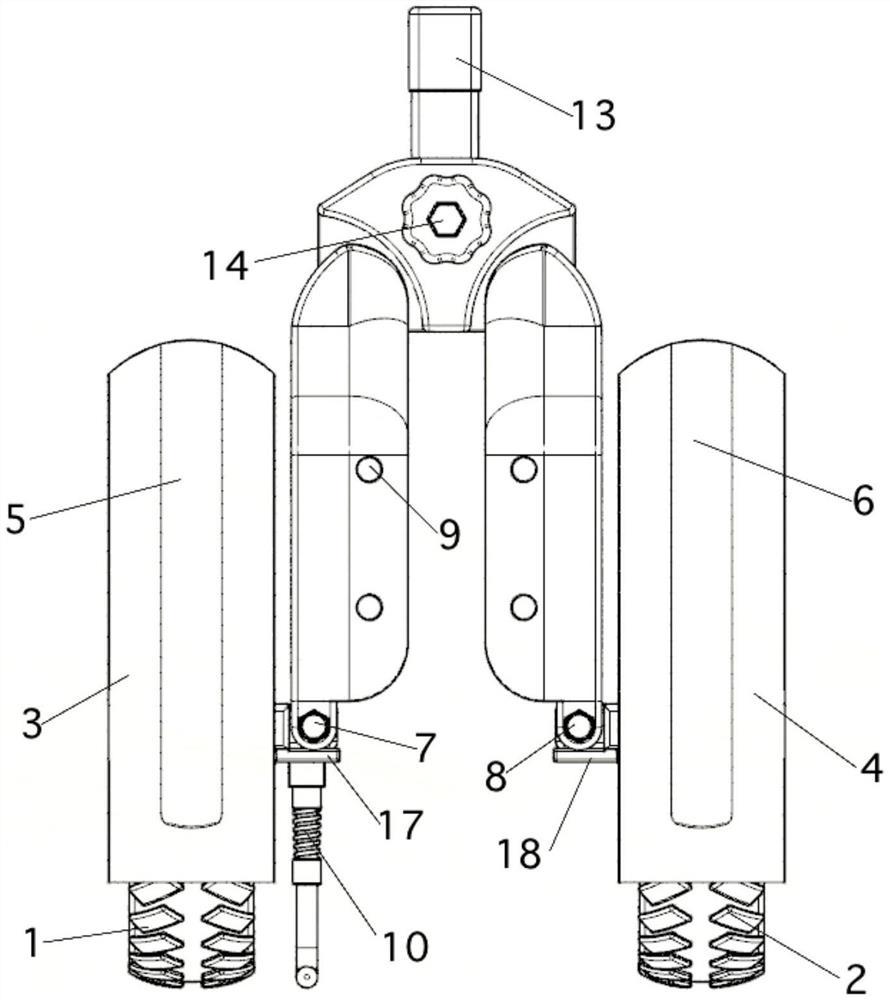
图20为本发明低重心变形机械骨架变形锁定过程示意图;
图21为本发明低重心变形机械骨架变形锁定后的侧视图;
图22为本发明锥齿轮传动机构示意图;
图23为本发明锥齿轮传动机构连杆Ⅰ和连杆Ⅱ部分示意图;
图24为本发明锥齿轮传动机构连杆Ⅰ和连杆Ⅱ部分A-A示意图;
图25为本发明发电机构主视图;
图26为本发明发电机构剖视图;
图27为本发明视觉图像处理流程图;
1-前轮组,2-后轮组,3-快速变形机械骨架,4-低重心机械骨架,5-可变形车把,6-前轮电机,7-后轮电机,8-曲柄中轴传动机构Ⅰ,9-座管Ⅰ,10-后叉Ⅰ,11-中间连接管Ⅰ,12-折叠变形锁定装置,13-中间连接管Ⅱ,14-头管Ⅰ,15-前叉上管Ⅰ,16-前叉Ⅰ,17-前轮变形锁定装置,18-套转变形锁定装置,19-连管,20-车座Ⅰ,21-平衡轮连接管,22-平衡轮,23-第二电机,24-第三电机,25-第一动力轮,26-第二动力轮,27-转动杆Ⅰ,28-转动杆Ⅱ,29-转动轴,30-卡槽,31-第一电磁铁,32-第一限位板,33-第一弹簧,34-转动管Ⅰ,35-转动管Ⅱ,36-锁定孔,37-第二电磁铁,38-驱动杆,39-第二限位板,40-第二弹簧,41-推杆,42-锁孔,43-压缩弹簧,44-推块,45-前叉上管连接板,46-头管连接板,47-连接杆,48-旋转手柄,49-锁舌,50-第三弹簧,51-前叉Ⅱ,52-前叉Ⅲ,53-脚踏Ⅰ,54-前叉上管Ⅱ,55-前叉上管Ⅲ,56-头管Ⅱ,57-中间连接管Ⅲ,58-中间连接管Ⅳ,59-中间连接管Ⅴ,60-座管Ⅱ,61-座管Ⅲ,62-后叉Ⅴ,63-曲柄中轴传动机构Ⅱ,64-后叉Ⅱ,65-后叉Ⅲ,66-锥齿轮传动机构,67-发电机构,68-车座Ⅱ,69-折叠脚踏,70-后叉Ⅳ,71-锥齿轮Ⅰ,72-锥齿轮Ⅱ,73-连杆Ⅰ,74-十字型连接键,75-连杆Ⅱ,76-连杆Ⅲ,77-减速器,78-第四电机,79-丝杆,80-固定座,81-滤波器,82-整流器,83-发电机,84-小锥齿轮,85-连接块。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。
面向可变形轮足机器人的快速变形和低重心系统与方法,包括可变形机械本体和自主导航行走系统,所述可变形机械本体的前轮组1和后轮组2可由前后串行轮形式变形为左右并行轮形式并锁定,所述可变形机械本体的前轮组1和后轮组2也可由左右并行轮的形式变形为前后串行轮的形式并锁定,所述自主导航行走系统位于可变形机械本体上,所述自主导航行走系统包括控制系统、动力系统、交互系统、电源系统、无线通信系统和卫星定位系统,所述控制系统分别与交互系统、动力系统、电源系统、无线通信系统和卫星定位系统电连接,动力系统为本发明中的前轮电机6、后轮电机7、第二电机23、第三电机24、第四电机78,即为本发明系统提供动力的装置,电源系统即本发明中的蓄电池。交互系统包括人与机器人交互系统及机器人与外界的交互系统。人机交互系统包括人机交互界面(按键或触控交互界面,听觉交互系统);机器人和外界的交互系统由视觉系统组成,视觉系统由摄像机、图像处理系统构成,机器人可利用视觉信息识别环境中的行走环境中的物体、人类或其他机器人,判断与障碍物的相对位置;中央控制系统根据视觉系统识别的路径和GPS系统提供的导航路径控制电机驱动机器人运动;人机交互、视觉系统、卫星导航定位和路径规划系统已日趋成熟,国内外已有多个开源的自动驾驶软件开发平台,上述条件将为本发明提出的轮足机器人自主导航的实用性提供了便利条件。
所述可变形机械本体包括前轮组1、后轮组2、刹车器和机械骨架,所述后轮组2通过后轴与机械骨架后叉一端相连,所述前轮组1通过前轴与机械骨架的前叉一端相连,所述机械骨架的前轮组1和机械骨架的后轮组2上均设置有刹车器,所述前轮组1的前轴上的前轮电机6和后轮组2的后轴上的后轮电机7均与控制系统的控制器相连,所述机械骨架包括快速变形机械骨架3和低重心机械骨架4。
所述快速变形机械骨架3包括曲柄中轴传动机构Ⅰ8、座管Ⅰ9、后叉Ⅰ10、中间连接管Ⅰ11、折叠变形锁定装置12、中间连接管Ⅱ13、头管Ⅰ14、前叉上管Ⅰ15、前叉Ⅰ16、前轮变形锁定装置17、可变形车把5、套转变形锁定装置18、连管19、车座Ⅰ20、蓄电池、平衡轮连接管21、平衡轮22、脚踏Ⅰ53、第二电机23、第三电机24、第一动力轮25和第二动力轮26,所述曲柄中轴传动机构Ⅰ8的中轴安装管分别与座管Ⅰ9、后叉Ⅰ10和中间连接管Ⅰ11一端相连,所述中间连接管Ⅰ11另一端通过折叠变形锁定装置12与中间连接管Ⅱ13一端相连,且折叠变形锁定装置12的转动杆Ⅰ27另一端与中间连接管Ⅰ11固定安装,转动杆Ⅱ28另一端与中间连接管Ⅱ13固定安装,中间连接管Ⅱ13另一端与头管Ⅰ14相连,所述头管Ⅰ14内穿插有前叉上管Ⅰ15,前叉上管Ⅰ15与头管Ⅰ14通过碗组相连,且前叉上管Ⅰ15通过前轮变形锁定装置17与头管Ⅰ14相连,前轮变形锁定装置17的前叉上管连接板45与前叉上管Ⅰ15固定安装,头管连接板46与头管Ⅰ14固定安装,前叉上管Ⅰ15伸出头管Ⅰ14一端设置有可变形车把5,前叉上管Ⅰ15另一端通过套转变形锁定装置18与前叉Ⅰ16一端相连,套转变形锁定装置18的转动管Ⅰ34另一端与前叉Ⅰ16固定安装,转动管Ⅱ35另一端与前叉上管Ⅰ15固定安装,前叉Ⅰ16另一端与前轮组1转动安装,所述座管Ⅰ9中部与连管19一端相连,连管19另一端与后叉Ⅰ10另一端相连,所述座管Ⅰ9另一端设置有车座Ⅰ20,座管Ⅰ9靠近车座Ⅰ20一端外圆面通过平衡轮连接管21设置有平衡轮22,所述曲柄中轴传动机构Ⅰ8的曲柄上设置有脚踏Ⅰ53,所述前叉Ⅰ16通过其上的基座固定安装有第二电机23,第二电机23输出轴设置有与前轮组1中的前轮相配合的第一动力轮25,所述后叉10通过其上的基座固定安装有第三电机24,第三电机24和第二电机23分别与控制系统的控制器相连,第三电机24输出轴设置有与后轮组2的后轮相配合的第二动力轮26,所述座管Ⅰ9、后叉Ⅰ10、中间连接管Ⅰ11、中间连接管Ⅱ13、头管Ⅰ14、前叉上管Ⅰ15、前叉Ⅰ16和连管19管内均设置有蓄电池,在电机驱动行走的过程中,当前轮电机6和后轮电机7驱动时,快速变形机械骨架3上不安装第二电机23、第三电机24、第一动力轮25和第二动力轮26;当第二电机23和第三电机24驱动时,前轮组1和后轮组2不安装前轮电机6和后轮电机7。
折叠变形锁定装置12包括转动杆Ⅰ27、转动杆Ⅱ28、转动轴29、卡槽30、第一电磁铁31、第一限位板32和第一弹簧33,转动杆Ⅰ27一端圆盘位于转动杆Ⅱ28一端对称设置的圆盘之间且通过转动轴29转动安装,转动杆Ⅰ27一端圆盘上开设有若干卡槽30,转动杆Ⅱ28对称设置的圆盘之间设置有第一电磁铁31,且第一电磁铁31的牵引杆与卡槽30配合,所述牵引杆上设置有第一限位板32,第一限位板32与第一电磁铁31之间设置有第一弹簧33,第一电磁铁31分别与控制系统的控制器和蓄电池相连,折叠变形锁定装置12的变形锁定原理:转动杆Ⅰ27和转动杆Ⅱ28均可围绕转动轴29旋转,未通电情况下,第一电磁铁31的牵引杆与水平位置的卡槽30配合,转动杆Ⅰ27与转动杆Ⅱ28处于锁定状态;第一电磁铁31通电后,第一电磁铁31上的牵引杆被第一电磁铁31的静铁芯吸引,使第一电磁铁31上的牵引杆与水平位置的卡槽30脱离,转动转动杆Ⅱ28绕着转动轴29旋转,转动杆Ⅰ27与转动杆Ⅱ28发生相对旋转状态下,第一电磁铁31失电,当转动杆Ⅱ28绕着转动轴29旋转至与水平位置相邻的卡槽30的位置时,第一电磁铁31的牵引杆在第一弹簧33的作用下进入与水平位置相邻的卡槽30内,此时转动杆Ⅰ27与转动杆Ⅱ28之间的夹角为30°,再次锁定转动杆Ⅰ27和转动杆Ⅱ28,折叠变形锁定装置12的转动角度为0-270°。
套转变形锁定装置18包括转动管Ⅰ34、转动管Ⅱ35、锁定孔36、第二电磁铁37、驱动杆38、第二限位板39、第二弹簧40、推杆41、锁孔42、压缩弹簧43、连接块85和推块44,所述转动管Ⅰ34一端与转动管Ⅱ35一端转动安装,转动管Ⅱ35侧壁开设有锁定孔36,锁定孔36内设置有连接块85,转动管Ⅱ35内设置有与转动管Ⅱ35轴线重合的第二电磁铁37,第二电磁铁37上设置有与第二电磁铁37轴线重合设置的驱动杆38,驱动杆38一端外表面设置有第二限位板39,第二限位板39与第二电磁铁37之间设置有第二弹簧40,驱动杆38另一端与推杆41相连,所述转动管Ⅰ34内壁开设有若干锁孔42,锁孔42孔底与压缩弹簧43一端相连,压缩弹簧43另一端设置有与连接块85配合的推块44,第二电磁铁37分别与控制系统的控制器和蓄电池相连。套转变形锁定装置18的变形锁定原理:在压缩弹簧43弹力的作用下,推块44同时嵌入转动管Ⅰ34的锁孔42和转动管Ⅱ35的锁定孔36内,推块44被压缩弹簧43弹力压在连接块85的表面上,转动管Ⅰ34和转动管Ⅱ35处于锁定状态;第二电磁铁37通电,使驱动杆38推动推杆41移动,推杆41推动连接块85移动,连接块85推动推块44上移,推块44缩回至转动管Ⅰ34的锁孔42内,转动管Ⅰ34和转动管Ⅱ35的锁定关系解除;转动管Ⅱ35旋转90度后第二电磁铁37失电,驱动杆38在第二弹簧40的作用下拉回推杆41,此时压缩弹簧43推动另一推块44嵌入至转动管Ⅰ34的另一锁孔42和转动管Ⅱ35的锁定孔36之间,转动管Ⅰ34和转动管Ⅱ35完成锁定,套转变形锁定装置18的转动角度为0-360°。
所述前轮变形锁定装置17包括头管连接板46、前叉上管连接板45、连接杆47、旋转手柄48、锁舌49和第三弹簧50,所述头管连接板46套设在头管14外圆面上,所述前叉上管连接板45套设在前叉上管15外圆面上,所述连接杆47贯穿前叉上管连接板45通孔,且连接杆47底端与锁舌49固定安装,锁舌49穿过头管连接板46上的孔与头管连接板46配合,连接杆47顶端伸出前叉上管连接板45部分设置有旋转手柄48,前叉上管连接板45与锁舌49之间设置有第三弹簧50,且第三弹簧50套设在连接杆47上。前轮变形锁定装置17的变形锁定原理为:正向旋转手柄48,带动连接杆47和锁舌49转动90度,向下按压手柄48,连接杆47和锁舌49通过头管连接板46上的孔;反向旋转手柄48转动90度,带动锁舌49反转90度,此时锁舌49不能通过头管连接板46上的孔,连接杆47把头管连接板46和前叉上管连接板45锁到一起,头管连接板46和前叉上管连接板45不能发生相对转动,前轮变形锁定完成。
所述低重心机械骨架4包括前叉Ⅱ51、前叉Ⅲ52、脚踏Ⅰ53、前叉上管Ⅱ54、前叉上管Ⅲ55、头管Ⅱ56、中间连接管Ⅲ57、中间连接管Ⅳ58、中间连接管Ⅴ59、座管Ⅱ60、座管Ⅲ61、后叉Ⅴ62、曲柄中轴传动机构Ⅱ63、后叉Ⅱ64、后叉Ⅲ65、后叉Ⅳ70、可变形车把5、前轮变形锁定装置17、八个折叠变形锁定装置12、四个套转变形锁定装置18、锥齿轮传动机构66、发电机构67、蓄电池、车座Ⅱ68和折叠脚踏69,所述中间连接管Ⅲ57一端与头管Ⅱ56外壁相连,头管Ⅱ56内穿插有前叉上管Ⅱ54,且前叉上管Ⅱ54通过前轮变形锁定装置17与头管Ⅱ56相连,前轮变形锁定装置17的前叉上管连接板45与前叉上管Ⅱ54固定安装,头管连接板46与头管Ⅱ56固定安装,前叉上管Ⅱ54一端伸出头管Ⅱ56一端部分设置有可变形车把5,可变形车把5的固定把两端通过第八折叠变形锁定装置与折叠把相连,前叉上管Ⅱ54另一端伸出头管Ⅱ56另一端部分与前叉上管Ⅲ55一端通过第一折叠变形锁定装置相连,第一折叠变形锁定装置的转动杆Ⅰ27另一端与前叉上管Ⅱ54固定安装,转动杆Ⅱ28另一端与前叉上管Ⅲ55一端固定安装,前叉上管Ⅲ55另一端通过第二折叠变形锁定装置与前叉Ⅱ51一端相连,第二折叠变形锁定装置的转动杆Ⅰ27另一端与前叉上管Ⅲ55固定安装,转动杆Ⅱ28另一端与前叉Ⅱ51固定安装,前叉Ⅱ51另一端通过第一套转变形锁定装置与前叉Ⅲ52一端相连,第一套装变形锁定装置18的转动管Ⅰ34另一端与前叉Ⅲ52固定安装,转动管Ⅱ35另一端与前叉Ⅱ51固定安装,前叉Ⅲ52另一端与前轮组1转动安装,所述中间连接管Ⅲ57与中间连接管Ⅳ58一端通过第三折叠变形锁定装置相连,第三折叠变形锁定装置的转动杆Ⅰ27另一端与中间连接管Ⅲ57固定安装,转动杆Ⅱ28另一端与中间连接管Ⅳ58固定安装,所述中间连接管Ⅳ58另一端与中间连接管Ⅴ59一端通过第四折叠变形锁定装置相连,第四折叠变形锁定装置的转动杆Ⅰ27另一端与中间连接管Ⅳ58固定安装,转动杆Ⅱ28另一端与中间连接管Ⅴ59固定安装,中间连接管Ⅴ59另一端与座管Ⅱ60外壁相连,座管Ⅱ60一端设置有车座Ⅱ68,座管Ⅱ60另一端通过第二套转变形锁定装置与座管Ⅲ61一端相连,第二套装变形锁定装置18的转动管Ⅱ35另一端与座管Ⅱ60固定安装,转动管Ⅰ34另一端与座管Ⅲ61固定安装,曲柄中轴传动机构Ⅱ63的两个曲柄上均设置有折叠脚踏69,曲柄上安装有第四套转变形锁定装置,所述座管Ⅲ61另一端通过第五折叠变形锁定装置与后叉Ⅱ64相连,第五折叠变形锁定装置的转动杆Ⅰ27另一端与座管Ⅳ62固定安装,转动杆Ⅱ28另一端与后叉Ⅱ64固定安装,所述后叉Ⅱ64一端固定安装在所述曲柄中轴传动机构Ⅱ63的中轴安装管外圆面上,后叉Ⅱ64另一端通过第六折叠变形锁定装置与后叉Ⅲ65一端相连,第六折叠变形锁定装置的转动杆Ⅰ27另一端与后叉Ⅱ64固定安装,转动杆Ⅱ28另一端与后叉Ⅲ65固定安装,后叉Ⅲ65另一端通过第七折叠变形锁定装置与后叉Ⅳ70一端相连,第七折叠变形锁定装置的转动杆Ⅰ27另一端与后叉Ⅲ65固定安装,转动杆Ⅱ28另一端与后叉Ⅳ70固定安装,后叉Ⅳ70另一端通过第三套转变形锁定装置与后叉Ⅴ62一端相连,第三套装变形锁定装置18的转动管Ⅱ35另一端与后叉Ⅳ70固定安装,转动管Ⅰ34另一端与后叉Ⅴ62固定安装,后叉Ⅴ62另一端与后轮组2的后轴相连,后轮组2与曲柄中轴传动机构Ⅱ63的中轴通过锥齿轮传动机构66或快拆链条机构相连,即在变形前打开快拆链条接头,取下链条,实现从前后串行轮到左右并行轮的变形,当从左右并行轮重新变形为前后并行轮时,重新安装快拆链条,或所述曲柄中轴传动机构Ⅱ63中轴安装管外圆面底端设置有发电机构67,所述前叉Ⅱ51、前叉Ⅲ52、前叉上管Ⅱ54、前叉上管Ⅲ55、头管Ⅱ56、中间连接管Ⅲ57、中间连接管Ⅳ58、中间连接管Ⅴ59、座管Ⅱ60、座管Ⅲ61、后叉Ⅴ62、后叉Ⅱ64、后叉Ⅲ65和后叉Ⅳ70的管内均设置有蓄电池,低重心机械骨架4可以通过锥齿轮传动机构66、快拆链条机构或发电机构67实现动能传递。
所述锥齿轮传动机构66包括锥齿轮Ⅰ71、锥齿轮Ⅱ72、连杆Ⅰ73、十字型连接键74、连杆Ⅱ75、连杆Ⅲ76、减速器77、第四电机78和丝杆79,所述锥齿轮Ⅰ71套设于去曲柄中轴传动机构Ⅱ63的中轴外圆面上,所述锥齿轮Ⅰ71与连杆Ⅰ73一端锥齿啮合,连杆Ⅰ73和连杆Ⅱ75沿轴向均开设有十字孔,连杆Ⅱ75与连杆Ⅰ73之间通过十字形连接键74相连,且十字形连接键74与连杆Ⅰ73和连杆Ⅱ75上的十字孔配合,所述十字形连接键74的中心开设有螺纹孔,连杆Ⅱ75的十字孔末端的连杆Ⅱ75内设置有第四电机78和减速器77,第四电机78通过减速器77与丝杆79一端相连,丝杆79另一端与十字形连接键74上的螺纹孔配合,连杆Ⅱ75另一端与连接杆Ⅲ76一端焊接,连接杆Ⅲ76另一端的锥齿与位于后轮组2后轴上的锥齿轮Ⅱ72啮合,所述第四电机78与控制系统的控制器相连, 需要打开成两部分时,启动第四电机78正转,驱动减速器77减速输出驱动丝杠79正转动,使丝杠79带动十字型连接键74与连杆Ⅰ73分离,打开锥齿轮传动机构66完成,恢复到前后轮串行的单车状态时,第四电机78反转,驱动减速器77减速输出驱动丝杠79反转动,使丝杠79带动十字型连接键74进入连杆Ⅰ73十字孔内,连杆Ⅰ73与连杆Ⅱ75串联在一起,恢复单车状态。
所述发电机构67包括固定座80,所述固定座80内腔设置有滤波器81、整流器82和发电机83,发电机83输出轴贯穿固定座80部分套设有与锥齿轮Ⅰ71啮合的小锥齿轮84,所述发电机83、整流器82、滤波器81和蓄电池依次相连,所述蓄电池通过变压芯片与控制系统的控制器相连。人力驱动折叠脚踏69驱动曲柄,曲柄带动中轴旋转,安装在中轴上的锥齿轮Ⅰ71旋转,带动与之啮合的小锥齿轮84旋转,小锥齿轮84驱动发电机83发电,发电机83发出的电能经过整流器82和滤波器81的整流和滤波后存入蓄电池内。
实施例1
面向可变形轮足机器人的快速变形和低重心系统,包括可变形机械本体和自主导航行走系统,所述可变形机械本体的前轮组1和后轮组2可由前后串行轮形式变形为左右并行轮形式并锁定,所述可变形机械本体的前轮组1和后轮组2也可由左右并行轮的形式变形为前后串行轮的形式并锁定,所述自主导航行走系统位于可变形机械本体上,所述自主导航行走系统包括控制系统、动力系统、交互系统、电源系统、无线通信系统和卫星定位系统,所述控制系统分别与交互系统、动力系统、电源系统、无线通信系统和卫星定位系统电连接。
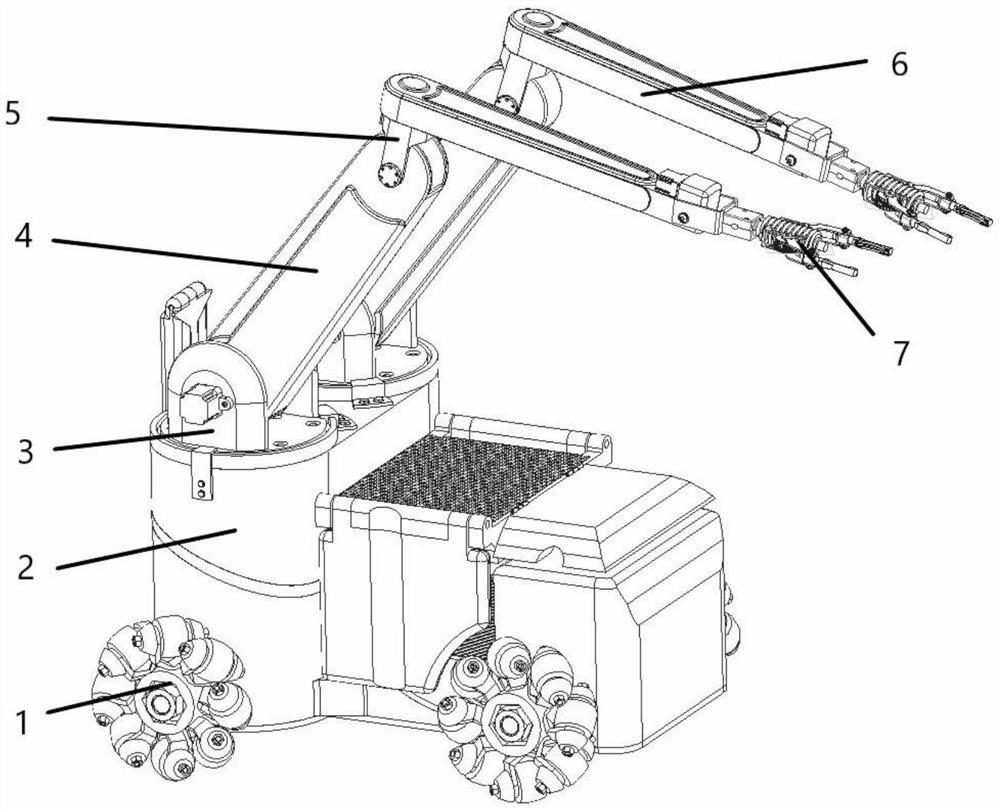
如图1-图6所示,所述可变形机械本体包括前轮组1、后轮组2、刹车器和机械骨架,所述后轮组2通过后轴与机械骨架后叉一端相连,所述前轮组1通过前轴与机械骨架的前叉一端相连,所述机械骨架的可变形车把5与前轮组1和机械骨架的可变形车把5与后轮组2之间均设置有刹车器,所述前轮组1的前轴上的前轮电机6和后轮组2的后轴上的后轮电机7均与控制系统的控制器相连,所述机械骨架包括快速变形机械骨架3和低重心机械骨架4。
所述快速变形机械骨架3包括曲柄中轴传动机构Ⅰ8、座管Ⅰ9、后叉Ⅰ10、中间连接管Ⅰ11、折叠变形锁定装置12、中间连接管Ⅱ13、头管Ⅰ14、前叉上管Ⅰ15、前叉Ⅰ16、前轮变形锁定装置17、可变形车把5、套转变形锁定装置18、连管19、车座Ⅰ20、蓄电池、平衡轮连接管21、平衡轮22、脚踏Ⅰ53、第二电机23、第三电机24、第一动力轮25和第二动力轮26,所述曲柄中轴传动机构Ⅰ8的中轴安装管分别与座管Ⅰ9、后叉Ⅰ10和中间连接管Ⅰ11一端相连,所述中间连接管Ⅰ11另一端通过折叠变形锁定装置12与中间连接管Ⅱ13一端相连,且折叠变形锁定装置12的转动杆Ⅰ27另一端与中间连接管Ⅰ11固定安装,转动杆Ⅱ28另一端与中间连接管Ⅱ13固定安装,中间连接管Ⅱ13另一端与头管Ⅰ14相连,所述头管Ⅰ14内穿插有前叉上管Ⅰ15,前叉上管Ⅰ15与头管Ⅰ14通过碗组相连,且前叉上管Ⅰ15通过前轮变形锁定装置17与头管Ⅰ14相连,前轮变形锁定装置17的前叉上管连接板45与前叉上管Ⅰ15固定安装,头管连接板46与头管Ⅰ14固定安装,前叉上管Ⅰ15伸出头管Ⅰ14一端设置有可变形车把5,前叉上管Ⅰ15另一端通过套转变形锁定装置18与前叉Ⅰ16一端相连,套转变形锁定装置18的转动管Ⅰ34另一端与前叉Ⅰ16固定安装,转动管Ⅱ35另一端与前叉上管Ⅰ15固定安装,前叉Ⅰ16另一端与前轮组1转动安装,所述座管Ⅰ9中部与连管19一端相连,连管19另一端与后叉Ⅰ10另一端相连,所述座管Ⅰ9另一端设置有车座Ⅰ20,座管Ⅰ9靠近车座Ⅰ20一端外圆面通过平衡轮连接管21设置有平衡轮22,所述曲柄中轴传动机构Ⅰ8的曲柄上设置有脚踏Ⅰ53,所述前叉Ⅰ16通过其上的基座固定安装有第二电机23,第二电机23输出轴设置有与前轮组1中的前轮相配合的第一动力轮25,所述后叉10通过其上的基座固定安装有第三电机24,第三电机24和第二电机23分别与控制系统的控制器相连,第三电机24输出轴设置有与后轮组2的后轮相配合的第二动力轮26,所述座管Ⅰ9、后叉Ⅰ10、中间连接管Ⅰ11、中间连接管Ⅱ13、头管Ⅰ14、前叉上管Ⅰ15、前叉Ⅰ16和连管19管内均设置有蓄电池,蓄电池给第二电机23、第三电机24、前轮电机6和后轮电机7供电。
如图7(a)、图7(b)、图8(a)、图8(b)和图9所示,折叠变形锁定装置12包括转动杆Ⅰ27、转动杆Ⅱ28、转动轴29、卡槽30、第一电磁铁31、第一限位板32和第一弹簧33,转动杆Ⅰ27一端圆盘位于转动杆Ⅱ28一端对称设置的圆盘之间且通过转动轴29转动安装,转动杆Ⅰ27一端圆盘上开设有若干卡槽30,转动杆Ⅱ28对称设置的圆盘之间设置有第一电磁铁31,且第一电磁铁31的牵引杆与卡槽30配合,所述牵引杆上设置有第一限位板32,第一限位板32与第一电磁铁31之间设置有第一弹簧33,第一电磁铁31分别与控制系统的控制器和电源相连,折叠变形锁定装置12的变形锁定原理:转动杆Ⅰ27和转动杆Ⅱ28均可围绕转动轴29旋转,未通电情况下,第一电磁铁31的牵引杆与水平位置的卡槽30配合,转动杆Ⅰ27与转动杆Ⅱ28处于锁定状态;第一电磁铁31通电后,第一电磁铁31上的牵引杆被第一电磁铁31的静铁芯吸引,使第一电磁铁31上的牵引杆与水平位置的卡槽30脱离,转动转动杆Ⅱ28绕着转动轴29旋转,转动杆Ⅰ27与转动杆Ⅱ28发生相对旋转状态下,第一电磁铁31失电,当转动杆Ⅱ28绕着转动轴29旋转至与水平位置相邻的卡槽30的位置时,第一电磁铁31的牵引杆在第一弹簧33的作用下进入与水平位置相邻的卡槽30内,此时转动杆Ⅰ27与转动杆Ⅱ28之间的夹角为30°,再次锁定转动杆Ⅰ27和转动杆Ⅱ28,折叠变形锁定装置12的转动角度为0-270°。
如图10和图11所示,套转变形锁定装置18包括转动管Ⅰ34、转动管Ⅱ35、锁定孔36、第二电磁铁37、驱动杆38、第二限位板39、第二弹簧40、推杆41、锁孔42、压缩弹簧43、连接块85和推块44,所述转动管Ⅰ34一端与转动管Ⅱ35一端转动安装,转动管Ⅱ35侧壁开设有锁定孔36,锁定孔36内设置有连接块85,转动管Ⅱ35内设置有与转动管Ⅱ35轴线重合的第二电磁铁37,第二电磁铁37上设置有与第二电磁铁37轴线重合设置的驱动杆38,驱动杆38一端外表面设置有第二限位板39,第二限位板39与第二电磁铁37之间设置有第二弹簧40,驱动杆38另一端与推杆41相连,所述转动管Ⅰ34内壁开设有若干锁孔42,锁孔42孔底与压缩弹簧43一端相连,压缩弹簧43另一端设置有与连接块85配合的推块44,第二电磁铁37分别与控制系统的控制器和蓄电池相连。套转变形锁定装置18的变形锁定原理:在压缩弹簧43弹力的作用下,推块44同时嵌入转动管Ⅰ34的锁孔42和转动管Ⅱ35的锁定孔36内,推块44被压缩弹簧43弹力压在连接块85的表面上,转动管Ⅰ34和转动管Ⅱ35处于锁定状态;第二电磁铁37通电,使驱动杆38推动推杆41移动,推杆41推动连接块85移动,连接块85推动推块44上移,推块44缩回至转动管Ⅰ34的锁孔42内,转动管Ⅰ34和转动管Ⅱ35的锁定关系解除;转动管Ⅱ35旋转90度后第二电磁铁37失电,驱动杆38在第二弹簧40的作用下拉回推杆41,此时压缩弹簧43推动另一推块44嵌入至转动管Ⅰ34的另一锁孔42和转动管Ⅱ35的锁定孔36之间,转动管Ⅰ34和转动管Ⅱ35完成锁定,套转变形锁定装置18的转动角度为0-360°。
如图12、图13和图14所示,所述前轮变形锁定装置17包括头管连接板46、前叉上管连接板45、连接杆47、旋转手柄48、锁舌49和第三弹簧50,所述头管连接板46套设在头管14外圆面上,所述前叉上管连接板45套设在前叉上管15外圆面上,所述连接杆47贯穿前叉上管连接板45通孔,且连接杆47底端与锁舌49固定安装,锁舌49穿过头管连接板46上的孔与头管连接板46配合,连接杆47顶端伸出前叉上管连接板45部分设置有旋转手柄48,前叉上管连接板45与锁舌49之间设置有第三弹簧50,且第三弹簧50套设在连接杆47上。前轮变形锁定装置17的变形锁定原理为:正向旋转手柄48,带动连接杆47和锁舌49转动90度,向下按压手柄48,连接杆47和锁舌49通过头管连接板46上的孔;反向旋转手柄48转动90度,带动锁舌49反转90度,此时锁舌49不能通过头管连接板46上的孔,连接杆47把头管连接板46和前叉上管连接板45锁到一起,头管连接板46和前叉上管连接板45不能发生相对转动,前轮变形锁定完成。
如图2所示,为了实现前轮通过套转变形锁定装置18的旋转,当仅保留了一侧的前叉Ⅰ16,且满足前叉Ⅰ16与前轮组1的前轴安装稳定性和强度的要求;当前叉Ⅰ16对称设置时,在未安装套转变形锁定装置18的前叉Ⅰ16位于前轮最高点偏上上方做切口,避免妨碍前轮做旋转变形,同时也可起到垂直方向传递重力的作用,增强骨架的牢固性。
面向可变形轮足机器人的快速变形系统的快速变形方法为:
如图15和图16所示,首先通过前轮变形锁定装置17将头管Ⅰ14与前叉上管Ⅰ15锁定,使前轮组1与座管Ⅰ9始终处于同一平面内;其次打开连接前叉上管Ⅰ15与前叉Ⅰ16的套转变形锁定装置18,具体为,第二电磁铁37通电,驱动杆38推动推杆41,推杆41推动推块44移动,推块44推动连接块85移动出通孔,解除锁定关系,前轮组1在前叉带动下转动180度后,第二电磁铁37失电,驱动杆38在第二弹簧40的作用下被拉回,连接块85在压缩弹簧43的作用下被推进推块44所在的通孔内,完成锁定,此时前轮组1与后轮组2处于平行状态;最后通过折叠变形锁定装置12的变形实现前轮组1前轴的中轴线与后轮组2的后轴的中轴线重合,具体为第一电磁铁31通电,牵引杆被电磁铁的静铁芯吸引,使牵引杆与转动杆Ⅰ27圆盘上的卡槽30脱离咬合状态,后轮组2绕着折叠变形锁定装置12上的转动轴29转动,至后轮组2的后轴的中轴线与前轮组1的前轴的中轴线重合后,第一电磁铁31失电,牵引杆在第一弹簧33的作用下进入另一卡槽30内实现咬合,完成锁定,同时平衡轮22与地面配合,前轮组1和后轮组2及平衡轮22构成三角稳定结构,启动车载自主导航行走系统,本发明返回至指定的停车位置。在左右并行轮的稳定状态,轮足机器人也可跟踪或伴随主人行走。
自主导航行走系统中的机载摄像头负责图像采集和压缩处理,通过无线网络将图像传送至后台处理中心,由后台对图像进行处理、识别,与数字地图进行匹配,进行自我定位、路径规划,处理后的信息通过无线网络发送给变形机器人,机器人进行路径寻找和避障操作。5G无线移动通信网络已开始在全球范围内进行部署,数据传送速度得到了极大的提升。可变形双轮机器人属于低速运动物体,对轻微的时间延迟并不敏感,采用后台服务器对图像处理的可行形极强。
实施例2
面向可变形轮足机器人的快速变形和低重心系统,包括可变形机械本体和自主导航行走系统,所述可变形机械本体的前轮组1和后轮组2可由前后串行轮形式变形为左右并行轮形式并锁定,所述可变形机械本体的前轮组1和后轮组2也可由左右并行轮的形式变形为前后串行轮的形式并锁定,所述自主导航行走系统位于可变形机械本体上,所述自主导航行走系统包括控制系统、动力系统、交互系统、电源系统、无线通信系统和卫星定位系统,所述控制系统分别与交互系统、动力系统、电源系统、无线通信系统和卫星定位系统电连接。
所述可变形机械本体包括前轮组1、后轮组2、刹车器和机械骨架,所述后轮组2通过后轴与机械骨架后叉一端相连,所述前轮组1通过前轴与机械骨架的前叉一端相连,所述机械骨架的可变形车把5与前轮组1和机械骨架的可变形车把5与后轮组2之间均设置有刹车器,所述前轮组1的前轴上的前轮电机6和后轮组2的后轴上的后轮电机7均与控制系统的控制器相连,所述机械骨架包括快速变形机械骨架3和低重心机械骨架4。
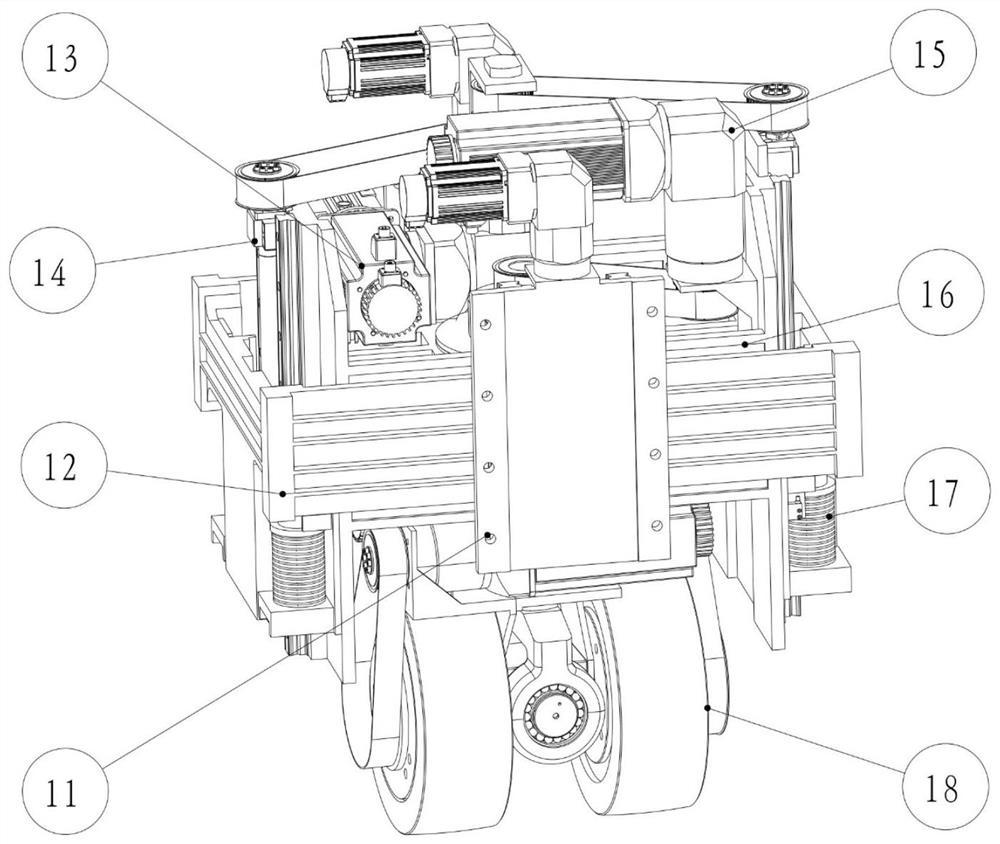
如图17、图18和图19所示,所述低重心机械骨架4包括前叉Ⅱ51、前叉Ⅲ52、脚踏Ⅰ53、前叉上管Ⅱ54、前叉上管Ⅲ55、头管Ⅱ56、中间连接管Ⅲ57、中间连接管Ⅳ58、中间连接管Ⅴ59、座管Ⅱ60、座管Ⅲ61、后叉Ⅴ62、曲柄中轴传动机构Ⅱ63、后叉Ⅱ64、后叉Ⅲ65、后叉Ⅳ70、可变形车把5、前轮变形锁定装置17、八个折叠变形锁定装置12、四个套转变形锁定装置18、锥齿轮传动机构66、发电机构67、蓄电池、车座Ⅱ68和折叠脚踏69,所述中间连接管Ⅲ57一端与头管Ⅱ56外壁相连,头管Ⅱ56内穿插有前叉上管Ⅱ54,且前叉上管Ⅱ54通过前轮变形锁定装置17与头管Ⅱ56相连,前轮变形锁定装置17的前叉上管连接板45与前叉上管Ⅱ54固定安装,头管连接板46与头管Ⅱ56固定安装,前叉上管Ⅱ54一端伸出头管Ⅱ56一端部分设置有可变形车把5,可变形车把5的固定把两端通过第八折叠变形锁定装置与折叠把相连,前叉上管Ⅱ54另一端伸出头管Ⅱ56另一端部分与前叉上管Ⅲ55一端通过第一折叠变形锁定装置相连,第一折叠变形锁定装置的转动杆Ⅰ27另一端与前叉上管Ⅱ54固定安装,转动杆Ⅱ28另一端与前叉上管Ⅲ55一端固定安装,前叉上管Ⅲ55另一端通过第二折叠变形锁定装置与前叉Ⅱ51一端相连,第二折叠变形锁定装置的转动杆Ⅰ27另一端与前叉上管Ⅲ55固定安装,转动杆Ⅱ28另一端与前叉Ⅱ51固定安装,前叉Ⅱ51另一端通过第一套转变形锁定装置与前叉Ⅲ52一端相连,第一套装变形锁定装置18的转动管Ⅰ34另一端与前叉Ⅲ52固定安装,转动管Ⅱ35另一端与前叉Ⅱ51固定安装,前叉Ⅲ52另一端与前轮组1转动安装,所述中间连接管Ⅲ57与中间连接管Ⅳ58一端通过第三折叠变形锁定装置相连,第三折叠变形锁定装置的转动杆Ⅰ27另一端与中间连接管Ⅲ57固定安装,转动杆Ⅱ28另一端与中间连接管Ⅳ58固定安装,所述中间连接管Ⅳ58另一端与中间连接管Ⅴ59一端通过第四折叠变形锁定装置相连,第四折叠变形锁定装置的转动杆Ⅰ27另一端与中间连接管Ⅳ58固定安装,转动杆Ⅱ28另一端与中间连接管Ⅴ59固定安装,中间连接管Ⅴ59另一端与座管Ⅱ60外壁相连,座管Ⅱ60一端设置有车座Ⅱ68,座管Ⅱ60另一端通过第二套转变形锁定装置与座管Ⅲ61一端相连,第二套装变形锁定装置18的转动管Ⅱ35另一端与座管Ⅱ60固定安装,转动管Ⅰ34另一端与座管Ⅲ61固定安装,曲柄中轴传动机构Ⅱ63的两个曲柄上均设置有折叠脚踏69,每个曲柄上均安装有第四套转变形锁定装置,所述座管Ⅲ61另一端通过第五折叠变形锁定装置与后叉Ⅱ64相连,第五折叠变形锁定装置的转动杆Ⅰ27另一端与座管Ⅳ62固定安装,转动杆Ⅱ28另一端与后叉Ⅱ64固定安装,所述后叉Ⅱ64一端固定安装在所述曲柄中轴传动机构Ⅱ63的中轴安装管外圆面上,后叉Ⅱ64另一端通过第六折叠变形锁定装置与后叉Ⅲ65一端相连,第六折叠变形锁定装置的转动杆Ⅰ27另一端与后叉Ⅱ64固定安装,转动杆Ⅱ28另一端与后叉Ⅲ65固定安装,后叉Ⅲ65另一端通过第七折叠变形锁定装置与后叉Ⅳ70一端相连,第七折叠变形锁定装置的转动杆Ⅰ27另一端与后叉Ⅲ65固定安装,转动杆Ⅱ28另一端与后叉Ⅳ70固定安装,后叉Ⅳ70另一端通过第三套转变形锁定装置与后叉Ⅴ62一端相连,第三套装变形锁定装置18的转动管Ⅱ35另一端与后叉Ⅳ70固定安装,转动管Ⅰ34另一端与后叉Ⅴ62固定安装,后叉Ⅴ62另一端与后轮组2的后轴相连,后轮组2与曲柄中轴传动机构Ⅱ63的中轴通过锥齿轮传动机构66或快拆链条机构相连,即在变形前打开快拆链条接头,取下链条,实现从前后串行轮到左右并行轮的变形,当从左右并行轮重新变形为前后并行轮时,重新安装安装快拆链条,或所述曲柄中轴传动机构Ⅱ63中轴安装管外圆面底端设置有发电机构67,所述前叉Ⅱ51、前叉Ⅲ52、前叉上管Ⅱ54、前叉上管Ⅲ55、头管Ⅱ56、中间连接管Ⅲ57、中间连接管Ⅳ58、中间连接管Ⅴ59、座管Ⅱ60、座管Ⅲ61、后叉Ⅴ62、后叉Ⅱ64、后叉Ⅲ65和后叉Ⅳ70的管内均设置有蓄电池,蓄电池给第四电机78和减速器77供电。
如图22、图23和图24所示,所述锥齿轮传动机构66包括锥齿轮Ⅰ71、锥齿轮Ⅱ72、连杆Ⅰ73、十字型连接键74、连杆Ⅱ75、连杆Ⅲ76、减速器77、第四电机78和丝杆79,所述锥齿轮Ⅰ71套设于去曲柄中轴传动机构Ⅱ63的中轴外圆面上,所述锥齿轮Ⅰ71与连杆Ⅰ73一端锥齿啮合,连杆Ⅰ73和连杆Ⅱ75沿轴向均开设有十字孔,连杆Ⅱ75与连杆Ⅰ73之间通过十字形连接键74相连,且十字形连接键74与连杆Ⅰ73和连杆Ⅱ75上的十字孔配合,所述十字形连接键74的中心开设有螺纹孔,连杆Ⅱ75的十字孔末端的连杆Ⅱ75内设置有第四电机78和减速器77,第四电机78通过减速器77与丝杆79一端相连,丝杆79另一端与十字形连接键74上的螺纹孔配合,连杆Ⅱ75另一端与连接杆Ⅲ76一端焊接,连接杆Ⅲ76另一端的锥齿与位于后轮组2后轴上的锥齿轮Ⅱ72啮合,所述第四电机78与控制系统的控制器相连, 需要打开成两部分时,启动第四电机78正转,驱动减速器77减速输出驱动丝杠79正转动,使丝杠79带动十字型连接键74与连杆Ⅰ73分离,打开锥齿轮传动机构66完成,恢复到前后轮串行的单车状态时,第四电机78反转,驱动减速器77减速输出驱动丝杠79反转动,使丝杠79带动十字型连接键74进入连杆Ⅰ73十字孔内,连杆Ⅰ73与连杆Ⅱ75串联在一起,恢复单车状态。
如图25和图26所示,所述发电机构67包括固定座80,所述固定座80内腔设置有滤波器81、整流器82和发电机83,发电机83输出轴贯穿固定座80部分套设有与锥齿轮Ⅰ71啮合的小锥齿轮84,所述发电机83、整流器82、滤波器81和蓄电池依次相连,所述蓄电池通过变压芯片与控制系统的控制器相连,通过折叠脚踏69驱动曲柄,曲柄带动中轴旋转,安装在中轴上的锥齿轮Ⅰ71旋转,带动与之啮合的小锥齿轮84旋转,小锥齿轮84驱动发电机83发电,发电机83发出的电能经过整流器82和滤波器81的整流和滤波后存入蓄电池内,蓄电池内电能驱动前后轮电机7转动。
面向可变形轮足机器人的低重心系统的变形方法为:如图20和图21所示,转动可变形车把5,使前叉上管Ⅱ54绕头管Ⅱ56转动90°后,通过前轮变形锁定装置17锁定前叉上管Ⅱ54和头管Ⅱ56;解锁座管Ⅲ61和后叉Ⅱ64之间的(中轴安装管附近)第五折叠变形锁定装置,转动后轮组2使与后轮组2连接的后叉Ⅱ64和座管Ⅲ61位于同一直线上,然后通过第五折叠变形锁定装置锁定后叉Ⅱ64和座管Ⅲ61之间的相对位置,即锁定后轮组2;解锁中间连接管Ⅲ57与中间连接管Ⅳ58之间的第三折叠变形锁定装置,使中间连接管Ⅲ57与中间连接管Ⅳ58之间连接处的夹角成90°,然后锁定通过中间连接管Ⅲ57与中间连接管Ⅳ58之间的第三折叠变形锁定装置,解锁中间连接管Ⅳ58与中间连接管Ⅴ59之间的第四折叠变形锁定装置,使中间连接管Ⅳ58与中间连接管Ⅴ59之间连接处的夹角成90°,然后锁定中间连接管Ⅳ58与中间连接管Ⅴ59之间的第四折叠变形锁定装置;解锁座管Ⅱ60与座管Ⅲ61之间安装的第二套转变形锁定装置,使后轮组2通过座管Ⅲ61绕着座管Ⅱ60旋转90°至后轮组2与前轮组1处于平行状态,锁定座管Ⅱ60与座管Ⅲ61之间安装的第二套转变形锁定装置;打开锥齿轮传动机构66,第四电机78启动,驱动减速器77减速输出驱动丝杠79正转动,使丝杠79带动十字型连接键74与连杆Ⅰ73分离,打开锥齿轮传动机构66完成;解锁前叉Ⅱ51与前叉Ⅲ52之间的第一套管变形锁定装置18,后叉Ⅳ70与后叉Ⅴ62之间的第三套管变形锁定装置18,使前轮组1和后轮组2旋转180后,低重心机械骨架4位于前轮组1和后轮组2之间,锁定前叉Ⅱ51与前叉Ⅲ52之间,后叉Ⅳ70与后叉Ⅴ62之间的第三套管变形锁定装置18;转动折叠脚踏69,先将折叠脚踏69从水平位置旋转至竖直位置,后通过第四套转变形锁定装置将折叠脚踏69在旋转180°后,使可折叠脚踏69位于座管Ⅱ60与曲柄之间,减小折叠脚踏69的占用空间,为下一步的变形做准备;然后解锁可变形车把5上的第八折叠变形锁定装置,使可变形车把5的一侧的折叠把转动90°与固定把部分垂直,锁定可变形车把5上的第八折叠变形锁定装置;分别解锁前叉上管Ⅱ54与前叉上管Ⅲ55之间第一折叠变形锁定装置,后叉Ⅱ64与后叉Ⅲ65之间的第六折叠变形锁定装置,转动前叉上管Ⅲ55和后叉Ⅲ65,使Ⅱ54和Ⅲ55以及Ⅱ64和后叉Ⅲ65的夹角均为90°,使低重心变形骨架的重心降低,锁定前叉上管Ⅱ54与前叉上管Ⅲ55之间第一折叠变形锁定装置,后叉Ⅱ64与后叉Ⅲ65之间的第六折叠变形锁定装置;分别解锁前叉Ⅱ51与前叉上管Ⅲ55之间第二折叠变形锁定装置,后叉Ⅲ65与后叉Ⅳ70之间的第七折叠变形锁定装置,转动前叉Ⅱ51和后叉Ⅳ70,使前叉Ⅱ51和前叉上管Ⅲ55之间以及后叉Ⅲ65与后叉Ⅳ70之间的夹角为60°,低重心变形骨架的重心再次降低,锁定前叉Ⅱ51与前叉上管Ⅲ55之间第二折叠变形锁定装置,后叉Ⅲ65与后叉Ⅳ70之间的第七折叠变形锁定装置,低重心机械骨架4变形完成。
如图27所示,机载摄像头负责图像采集和压缩处理,通过无线网络将图像传送至后台处理中心,由后台对图像进行处理、识别,与数字地图进行匹配,进行自我定位、路径规划,处理后的信息通过无线网络发送给变形机器人,机器人进行路径寻找和避障操作。5G无线移动通信网络已开始在全球范围内进行部署,数据传送速度得到了极大的提升。可变形双轮机器人属于低速运动物体,对轻微的时间延迟并不敏感,采用后台服务器对图像处理的可行形极强。
面向可变形轮足机器人的快速变形和低重心系统与方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0