







专利摘要
本发明的目的在于提供一种轴系扭转振动的测量方法,被测齿轮安装在被测齿轮轴上,将电涡流传感器轴向安装在被测齿轮侧面,电涡流传感器平行于被测齿轮轴线,电涡流传感器的探头对准分度圆的位置,被测齿轮轴和被测齿轮转动后,每有一个被测齿轮的齿经过电涡流传感器,电涡流传感器测得一个脉冲信号,同时记录脉冲宽度,通过脉冲宽度获得被测齿轮轴的瞬时角速度,将瞬时角速度绘制成瞬时角速度曲线,对瞬时角速度曲线积分,进而得到被测齿轮轴扭转振动的角度域曲线。本发明传感器安装在轴向可以避开齿轮齿面加工误差导致的测量误差,不要求齿顶表面粗糙度,工程应用性强,测量结果更精确。
权利要求
1.一种轴系扭转振动的测量方法,其特征是:被测齿轮安装在被测齿轮轴上,将电涡流传感器轴向安装在被测齿轮侧面,电涡流传感器平行于被测齿轮轴线,电涡流传感器的探头对准分度圆的位置,被测齿轮轴和被测齿轮转动后,每有一个被测齿轮的齿经过电涡流传感器,电涡流传感器测得一个脉冲信号,同时记录脉冲宽度,通过脉冲宽度获得被测齿轮轴的瞬时角速度,将瞬时角速度绘制成瞬时角速度曲线,对瞬时角速度曲线积分,进而得到被测齿轮轴扭转振动的角度域曲线。
2.根据权利要求1所述的一种轴系扭转振动的测量方法,其特征是:电涡流传感器工作频带为0~5000Hz。
说明书
技术领域
本发明涉及的是一种振动测量方法,具体地说是轴系振动测量方法。
背景技术
振动工程中,新型船舶设计建造时,必须对轴系扭转振动进行计算分析和实船检测,确保轴系扭振始终处于安全状况或划出转速禁区。实船上测试条件有限,准确、有效、便捷的测试方法对于扭振测量极为重要。
传统的齿轮轴系扭振测量一般采用将电涡流传感器或磁电式传感器径向安装在齿轮处,正面对准轮齿齿顶表面的方法。经文献检索,发现4篇文献涉及到采用电涡流传感器径向安装在齿轮处测量扭振的内容,分别是:振动、测试与诊断2013年第3期刊登的蒋云帆的《航空发动机转子扭振测量新方法》,武汉理工大学周斌的博士学位论文《双质量飞轮减震系统测试技术研究》,试验·测试2012年第6期刊登的吴飞的《汽车动力传动轴系扭振数字化测试系统》,和华北电力大学郭钢利的硕士学位论文《汽轮发电机组轴系扭振测量与分析》。第一篇文献中使用电涡流传感器径向安装在齿轮处,探头正面对准轮齿,齿盘齿数为35,其中一个为宽齿,34个窄齿。由于齿数少,又为径向安装传感器,位移突变不明显,在100rpm的低转速情况下,已经出现严重的信号失真的现象,测量误差较大,况且这种齿轮需要特殊加工,工程实际应用不广泛。第二篇文献中,在齿轮盘相距180°的对称位置处径向安装了两套电涡流传感器,目的是减少横向振动的干扰,但却不能完全消除。实际测量中,齿轮大部分都被罩壳覆盖,想要对称布置2个测点会使安装难度加大,难以实现。后两篇文献均采用台湾超荣(CORON)公司的CTS—A12M—2ANA电涡流传感器,其优点是能够将信号获取与整形整合处理,输出信号为方波,但这种方式只是通过计脉冲个数来得到平均转速,而不是瞬时转速,测量结果不精确。由于径向安装传感器时探头距离齿顶面很近,所以要求齿面加工精度很高,不然容易磨损传感器,所以不适合测量齿顶表面粗糙的齿轮。经文献检索,发现几十篇文献涉及到采用磁电式传感器径向安装在齿轮处测量扭振的内容,例如内燃机工程2006年4月第2期刊登的李松和的《斯太尔WD615系列柴油发动机扭振测量与分析》,机械设计与制造2007年6月第6期刊登的赵海波的《履带车辆动力传动系统扭振的测试与分析》,和吉林大学高锋军的硕士学位论文《工程车辆柴油机轴系扭振特性分析及测试研究》等,这些文献均采用磁电式传感器径向布置在齿轮处的方法测量,传感器距离齿面非常近,如果齿顶表面粗糙或者有沿齿面的突起,测量结果将受到很大影响,所以这种方法对齿顶表面粗糙度要求很高,而且安装调整传感器也很不方便,很难在工程上得到广泛应用。
发明内容
本发明的目的在于提供可以满足工程使用的精度并容易实施的一种轴系扭转振动的测量方法。
本发明的目的是这样实现的:
本发明一种轴系扭转振动的测量方法,其特征是:被测齿轮安装在被测齿轮轴上,将电涡流传感器轴向安装在被测齿轮侧面,电涡流传感器平行于被测齿轮轴线,电涡流传感器的探头对准分度圆的位置,被测齿轮轴和被测齿轮转动后,每有一个被测齿轮的齿经过电涡流传感器,电涡流传感器测得一个脉冲信号,同时记录脉冲宽度,通过脉冲宽度获得被测齿轮轴的瞬时角速度,将瞬时角速度绘制成瞬时角速度曲线,对瞬时角速度曲线积分,进而得到被测齿轮轴扭转振动的角度域曲线。
本发明还可以包括:
1、电涡流传感器工作频带为0~5000Hz。
本发明的优势在于:本发明传感器安装在轴向可以避开齿轮齿面加工误差导致的测量误差,不要求齿顶表面粗糙度,工程应用性强,测量结果更精确;将测量信号所用的电涡流传感器与信号处理过程中的脉宽计数分析法相结合,无须接入整形电路,使测量过程更简便。
附图说明
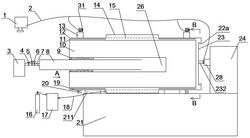
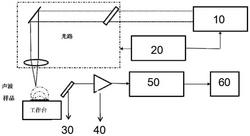
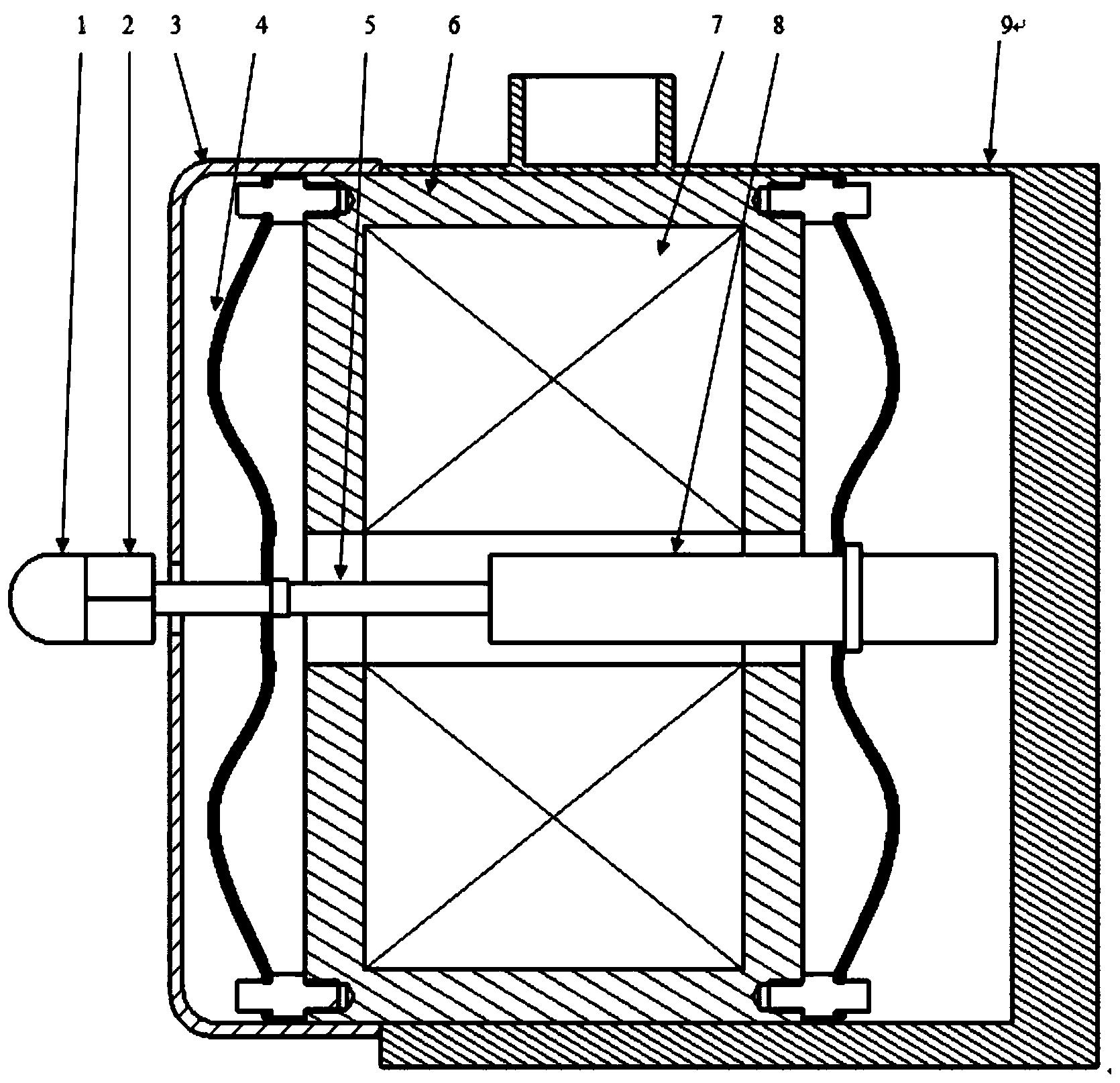
图1为电涡流传感器安装示意图1;
图2为电涡流传感器安装示意图2。
具体实施方式
下面结合附图举例对本发明做更详细地描述:
结合图1~2,本发明一种轴系扭转振动的测量方法,被测齿轮安装在被测齿轮轴上,将电涡流传感器轴向安装在被测齿轮侧面,电涡流传感器平行于被测齿轮轴线,电涡流传感器的探头对准分度圆的位置,被测齿轮轴和被测齿轮转动后,每有一个被测齿轮的齿经过电涡流传感器,电涡流传感器测得一个脉冲信号,同时记录脉冲宽度,通过脉冲宽度获得被测齿轮轴的瞬时角速度,将瞬时角速度绘制成瞬时角速度曲线,对瞬时角速度曲线积分,进而得到被测齿轮轴扭转振动的角度域曲线。测量系统中无须接入整形电路。
如图1所示的系统中,需要测量轴系的扭转振动,测量中将量程为4mm的电涡流传感器轴向安装到齿轮侧面,探头对准分度圆,距离齿侧面约3mm;每经过一个齿,传感器测得一个脉冲信号,分析脉冲宽度可得出轴的瞬时角速度,进而积分得到扭振的角度域曲线。测量过程中被测设备齿轮处的纵振振幅没有超过正负1.5mm,轮齿均匀分布,并且侧表面较光滑。
根据上述方法对实船进行轴系扭振测量,飞轮齿顶表面粗糙,有明显突起,不能在径向安装传感器,故使用电涡流传感器轴向安装到在飞轮侧面进行测量,测量结果与计算结果相对比,测量误差如下表所示。测量结果表明,将电涡流传感器轴向安装在齿轮侧面测量扭振的方法,测量结果符合工程应用标准,适合工程实际应用。
本发明与传统的径向安装电涡流传感器或磁电式传感器测量扭振方法的区别在于:
(1)本发明提出的轴向安装电涡流传感器,安装方式简便,易于调整位置,且传感器不易被损坏。由于采用轴向安装,齿盘直径较大,可以采用大直径电涡流传感器进行较远距离测量。传统的电涡流传感器或磁电式传感器是径向安装的,即传感器正对齿顶,一般要求传感器距离齿面很近,磁电式传感器的安装一般在距离齿顶面小于1mm;电涡流传感器要求被测物体面积大于两倍的传感器直径,然而齿顶表面积很小,就要求采用小直径电涡流传感器,进而导致传感器测量范围很小,也就是传感器必须小距离安装。这样近的距离要求轴系在开始旋转、升降速运行和停止的过程中不能有大的径向跳动,而在实际船舶轴系轴承中,油膜的厚度会在工况变化时发生变化,这样会引起轴的位置的变化,齿轮盘也会随之发生径向跳动,传感器极有可能被齿轮击中,造成传感器损坏失灵,严重时可能伤及周围测试人员,存在安全隐患。
(2)本发明提出的信号处理方法通过对测量的脉冲宽度进行计数分析,得到轴的瞬时转速,进而积分得到扭振的角度域曲线,测量结果准确。该分析方法与磁电式传感器测量扭振所用的方法原理相同,但与径向安装电涡流传感器测量原理不同,径向安装电涡流传感器方式只是通过计脉冲个数来得到平均转速,而不是瞬时转速,测量结果不精确。
(3)本发明提出的轴向安装电涡流传感器不需要考虑齿顶表面加工精度,可测量齿顶表面不光滑,甚至有严重突起的齿轮轴系扭转振动,工程应用广泛。采用轴向安装只需要分度圆齿分布均匀就可以保证测试精度,在实际工程中,保证分度圆上齿分布均匀是齿轮加工的最基本要求,容易实现。传统的径向安装电涡流传感器或磁电式传感器均要求齿顶表面光滑,但船用盘车及飞轮齿轮大多为铸造件,为节省成本,加工后不进行齿面修形,齿顶表明会有凹凸,电涡流传感器通过测量探头与齿面间的位移变化得到脉冲信号,如果齿顶表面有突起,则测得的信号会出现额外的脉冲。尽管脉冲幅值与正常齿引起的幅值有所不同,但对设置脉冲触发要求较高,设置触发值过低,会将额外的脉冲计入在内,触发值过高,会漏掉正常齿引起的脉冲,使测量结果受到很大影响;磁电式传感器通过齿轮切割磁力线,产生感应电动势形成脉冲,齿顶表面的突起会使测量的信号中增加一个脉冲,该脉冲与正常齿经过引起的脉冲等幅,但脉宽不一样,这会带来附加误差。
(4)本发明提出的电涡流传感器工作频带为0~5000Hz,测量范围更广,可以测量低转速齿轮轴系的扭振。磁电式传感器的最低工作频率一般为10Hz(见武汉理工大学学报2000年10月葛维晶的《低速柴油机非接触式扭振测量的研究》),不能测量低转速轴系扭振。
(5)本发明提出的电涡流传感器中无须接入整形电路,由传感器测量的位移突变引发脉冲,输出波形不是方波,但上升沿和下降沿非常陡峭,只需通过手动设置触发电压来识别脉冲和脉宽,且测量脉冲信号幅值较稳定,不需重复设置触发电压。有源磁电式传感器中须接入整形电路,目的是将上升沿和下降沿坡度较缓的正弦信号转化为方波,但其感应电压会随转速升高而增大,测量变转速的轴系时脉冲幅值不稳定,需不断重新设定触发电压。
(6)本发明提出的电涡流传感器通过测量位移变化得到脉冲信号,不会受到外界电磁场的干扰,可靠性高。磁电式传感器由于其测量原理所致,很容易受到外界磁场的干扰,使测量信号发生改变。
一种轴系扭转振动的测量方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0