

IPC分类号 : F15B11/16,F15B13/06,F15B21/02,F15B1/02,F02B75/04,F02D15/00



![叔丁基嘧啶三氮唑铜[I]双核配合物发光材料及制备方法](https://www.zhichawang.com/youzhi22/CN106432290A/CN106432290A.jpg)



专利摘要
本发明公开了一种VCR发动机曲轴连杆液压控制系统,包括VCR连杆液压缸、第一油路和第二油路,所述第一油路的一端与VCR连杆液压缸的无杆腔相连、另一端通过第一液压单向阀与伺服阀的左位液压回路相连;所述第二油路的一端与VCR连杆液压缸的有杆腔相连、另一端通过第二液压单向阀与伺服阀的右位液压回路相连;所述伺服阀通过变量柱塞泵与油箱相连;本发明提供的VCR发动机曲轴连杆液压控制系统,能够实现油路方向的快速切换和位置的精确控制;同时,本发明还提供一种VCR发动机曲轴连杆液压控制方法。
权利要求
1.一种VCR发动机曲轴连杆液压控制系统,包括VCR连杆液压缸、第一油路和第二油路,其特征在于:所述第一油路的一端与VCR连杆液压缸的无杆腔相连、另一端通过第一液压单向阀与伺服阀的左位液压回路相连;所述第二油路的一端与VCR连杆液压缸的有杆腔相连、另一端通过第二液压单向阀与伺服阀的右位液压回路相连;所述伺服阀通过变量柱塞泵与油箱相连;
该系统还包括控制器、用于采集发动机转速信息的发动机转速传感器、用于采集节气门位置信息的节气门位置传感器、用于采集连杆位置信息的位移传感器、用于采集VCR连杆液压缸缸内温度的缸内温度传感器、用于采集VCR连杆液压缸缸内压力的缸内压力传感器、用于采集VCR连杆液压缸缸外温度的缸外温度传感器和用于采集VCR连杆液压缸缸外压力的缸外压力传感器;所述发动机转速传感器、节气门位置传感器、位移传感器、缸内温度传感器、缸内压力传感器、缸外温度传感器及缸外压力传感器的信号输出端均与控制器的信号输入端相连,所述伺服阀、第一液压单向阀、第二液压单向阀及变量柱塞泵的信号输入端均与控制器的信号输出端相连。
2.根据权利要求1所述的VCR发动机曲轴连杆液压控制系统,其特征在于:所述伺服阀与第一液压单向阀、第二液压单向阀之间设有蓄能器。
3.根据权利要求1所述的VCR发动机曲轴连杆液压控制系统,其特征在于:所述控制器为STM32F103C8T6型单片机。
4.一种VCR发动机曲轴连杆液压控制方法,其特征在于,包括以下步骤:
步骤一、根据发动机转速传感器和节气门位置传感器,确定汽车的工况,根据不同的工况选择对应的压缩比,确定连杆的目标位移变化量x1;
步骤二、根据连杆的目标位移变化量x1和连杆的当前位移x2,得出对应的位移变化量ΔX和缸内油液目标体积变化量V1;Δx=x1-x2,若ΔX>0则进行进油流程,若ΔX<0则进行出油流程;
步骤三、通过缸内温度传感器和缸内压力传感器测得的缸内温度T1和缸内压力P1,由T1、P1,得出对应的缸内油液密度ρ1;由缸内油液体积变化量V1和缸内油液密度ρ1,得出进油/出油质量m;
步骤四、通过缸外温度传感器和缸外压力传感器测得缸外温度T2和缸外压力P2;由T2、P2,得出对应的缸外油液密度ρ2;由进油/出油质量m和缸外油液密度ρ2,得出缸外进油/出油体积V2;
步骤五、根据缸外进油/出油体积V2的大小,选择高/低档位的伺服阀控制电压U1/U2,并得出进油/出油时间t,进而控制进油/出油的体积,进行进油/出油操作;
步骤六、进油/出油操作完成后,根据位移传感器的信号并根据位置反馈系统的处理,得到实际连杆位移x,进而得出实际缸内油液体积变化量V,根据m、V得出实际缸内油液密度ρ;
步骤七、根据缸内油液目标体积变化量V1和实际缸内油液体积变化量V,得到油液体积变化差值ΔV;
步骤八、若ΔV>5×10-5ml,则ΔV作为缸内油液目标体积变化量,重新进行步骤二至步骤七;若ΔV≤5×10-5ml,则结束。
5.根据权利要求4所述的VCR发动机曲轴连杆液压控制方法,其特征在于,在步骤一中,连杆的目标位移变化量x1通过以下方式确定:
当0<<ra<0.4且0<<n<1500rpm时,压缩比为24.8,x1=-0.921mm;
当0<<ra<<0.4且n>>1500rpm时,压缩比为23.6,x1=-0.693mm;
当0.4<<ra<0.7且0<<n<1500rpm时,压缩比为19.6,x1=0.276mm;
当0.4<<ra<0.7且n>>1500rpm时,压缩比为18.5,x1=0.625mm;
当ra>>0.7且0<<n<1500rpm时,压缩比为17.6,x1=0.941mm;
当ra>>0.7且n>>1500rpm时,压缩比为16.9,x1=1.212mm;
其中,ra为通过节气门位置传感器确定的发动机负荷,n为通过发动机转速传感器确定的发动机转速。
6.根据权利要求5所述的VCR发动机曲轴连杆液压控制方法,其特征在于:在步骤三和步骤四中,缸内油液密度ρ1及缸外油液密度ρ2均通过动态BP算法得出,动态BP算法中的训练数据库包含有一百种工况,一百种工况是根据发动机连杆工作环境所对应的温度和压力,分别选择横纵坐标各十个点而两两对应所确定的。
7.根据权利要求6所述的VCR发动机曲轴连杆液压控制方法,其特征在于:在步骤六中,在得出实际缸内油液密度ρ后同时将其更新到动态BP算法的训练点数据库中。
8.根据权利要求4所述的VCR发动机曲轴连杆液压控制方法,其特征在于:在步骤五中,若V2≥0.05ml则选择高电压U1,若V2<0.05ml,则选择低电压U2。
说明书
技术领域
本发明涉及VCR发动机控制领域,特别涉及一种VCR发动机曲轴连杆液压控制系统及其控制方法。
背景技术
VCR(Variable Compression Ratio,可变压缩比)技术的核心是:根据发动机的运行工况动态的调整发动气缸的压缩比,在低负荷工况时发动机保持较高的压缩比,这样可以提高燃油经济性和降低尾气排放;而在高负荷工况时发动机采用较低的压缩比,以防止发动机的粗暴燃烧,提高发动机的可靠性。作为提高发动机燃油经济性最有潜力的技术,VCR技术受到国内外学界和企业界的极大关注。现有的实现压缩比可变的发动机,一般都是通过改变活塞行程的方式来调节压缩比,存在的问题是:用于调节活塞行程的机械装置结构复杂、部件众多,由于发动机对于结构稳定性的要求十分高,因此导致这类VCR发动机造价昂贵;由于压缩比控制机制较为复杂,再加上机械装置的实时响应性本身就较慢,导致现有的VCR发动机难以应对发动机突变工况条件下的控制需求,控制效果较差,并且由于实际运行中发动机工况变化十分频繁,机械装置较易磨损;同时,机械装置还存在可调状态有限的问题。
为解决上述技术问题,中国发明专利CN 103670729 B公开了一种可变连杆式VCR发动机连杆机构,连杆机构中的连杆采用一由液压控制伸缩的活塞结构实现,通过调节液压来调节连杆的长度,从而起到动态改变压缩比的目的,其提供了一种新的压缩比调节手段,可调节状态灵活多样,调节动作响应较快,不需要复杂的机械传动装置,结构较为简单,成本较低。
根据可变压缩比对液压系统的要求分析,要求液压系统具有较高的位置精确性及快速响应性,因此位移控制是该液压系统的核心问题,同时该液压系统的位置保持性也需要可靠的保证,而现有技术中尚未有满足上述需求的液压控制及控制方法。
发明内容
有鉴于此,本发明的目的在于提供一种VCR发动机曲轴连杆液压控制系统,能够实现油路方向的快速切换和位置的精确控制;同时,本发明还提供一种VCR发动机曲轴连杆液压控制方法。
本发明的VCR发动机曲轴连杆液压控制系统,包括VCR连杆液压缸、第一油路和第二油路,所述第一油路的一端与VCR连杆液压缸的无杆腔相连、另一端通过第一液压单向阀与伺服阀的左位液压回路相连;所述第二油路的一端与VCR连杆液压缸的有杆腔相连、另一端通过第二液压单向阀与伺服阀的右位液压回路相连;所述伺服阀通过变量柱塞泵与油箱相连;
该系统还包括控制器、用于采集发动机转速信息的发动机转速传感器、用于采集节气门位置信息的节气门位置传感器、用于采集连杆位置信息的位移传感器、用于采集VCR连杆液压缸缸内温度的缸内温度传感器、用于采集VCR连杆液压缸缸内压力的缸内压力传感器、用于采集VCR连杆液压缸缸外温度的缸外温度传感器和用于采集VCR连杆液压缸缸外压力的缸外压力传感器;所述发动机转速传感器、节气门位置传感器、位移传感器、缸内温度传感器、缸内压力传感器、缸外温度传感器及缸外压力传感器的信号输出端均与控制器的信号输入端相连,所述伺服阀、第一液压单向阀、第二液压单向阀及变量柱塞泵的信号输入端均与控制器的信号输出端相连。
进一步,所述伺服阀与第一液压单向阀、第二液压单向阀之间设有蓄能器。
进一步,所述控制器为STM32F103C8T6型单片机。
本发明的VCR发动机曲轴连杆液压方法,包括以下步骤:
步骤一、根据发动机转速传感器和节气门位置传感器,确定汽车的工况,根据不同的工况选择对应的压缩比,确定连杆的目标位移变化量x1;
步骤二、根据连杆的目标位移变化量x1和连杆的当前位移x2,得出对应的位移变化量Δx和缸内油液目标体积变化量V1;αx=x1-x2,若Δx>0则进行进油流程,若Δx<0则进行出油流程;
步骤三、通过缸内温度传感器和缸内压力传感器测得的缸内温度T1和缸内压力P1,由T1、P1,得出对应的缸内油液密度ρ1;由缸内油液体积变化量V1和缸内油液密度ρ1,得出进油/出油质量m;
步骤四、通过缸外温度传感器和缸外压力传感器测得缸外温度T2和缸外压力P2;由T2、P2,得出对应的缸外油液密度ρ2;由进油/出油质量m和缸外油液密度ρ2,得出缸外进油/出油体积V2;
步骤五、根据缸外进油/出油体积V2的大小,选择高/低档位的伺服阀控制电压U1/U2,并得出进油/出油时间t,进而控制进油/出油的体积,进行进油/出油操作;
步骤六、进油/出油操作完成后,根据位移传感器的信号并根据位置反馈系统的处理,得到实际连杆位移x,进而得出实际缸内油液体积变化量V,根据m、V得出实际缸内油液密度ρ;
步骤七、根据缸内油液目标体积变化量V1和实际缸内油液体积变化量V,得到油液体积变化差值ΔV;
步骤八、若ΔV>5×10-5ml,则ΔV作为缸内油液目标体积变化量,重新进行步骤二至步骤七;若ΔV≤5×10-5ml,则结束。
进一步,在步骤一中,连杆的目标位移变化量x1通过以下方式确定:
当0<<ra<0.4且0<<n<1500rpm时,压缩比为24.8,x1=-0.921mm;
当0<<ra<0.4且n>>1500rpm时,压缩比为23.6,x1=-0.693mm;
当0.4<<ra<0.7且0<<n<1500rpm时,压缩比为19.6,x1=0.276mm;
当0.4<<ra<0.7且n>>1500rpm时,压缩比为18.5,x1=0.625mm;
当ra>>0.7且0<<n<1500rpm时,压缩比为17.6,x1=0.941mm;
当ra>>0.7且n>>1500rpm时,压缩比为16.9,x1=1.212mm;
其中,ra为通过节气门位置传感器确定的发动机负荷,n为通过发动机转速传感器确定的发动机转速。
进一步,在步骤三和步骤四中,缸内油液密度ρ1及缸外油液密度ρ2均通过动态BP算法得出,动态BP算法中的训练数据库包含有一百种工况,一百种工况是根据发动机连杆工作环境所对应的温度和压力,分别选择横纵坐标各十个点而两两对应所确定的。
进一步,在步骤六中,在得出实际缸内油液密度ρ后同时将其更新到动态BP算法的训练点数据库中。
进一步,在步骤五中,若V2≥0.05ml则选择高电压U1,若V2<0.05ml,则选择低电压U2。
本发明的有益效果:本发明的VCR发动机曲轴连杆液压控制系统,采用闭环控制系统由伺服阀实现油路方向的快速切换和位置的精确控制,进出油路的两个液控单向阀实现伺服阀在中位机能的快速锁紧,蓄能器减轻换向时的冲击和压力脉动;
本发明的VCR发动机曲轴连杆液压控制方法,使得液压控制系统能够通过实时调整VCR发动机曲轴连杆的伸长长度来改变发动机的压缩比,使发动机运行在最佳状态。
附图说明
下面结合附图和实施例对本发明作进一步描述:
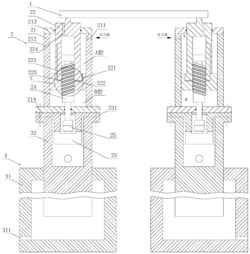
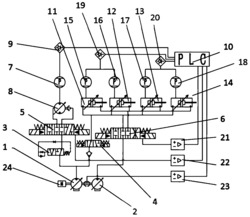
图1为本发明的VCR发动机曲轴连杆液压控制系统的结构示意图;
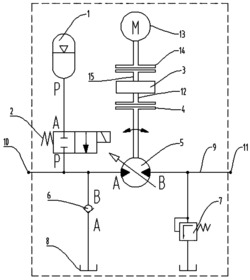
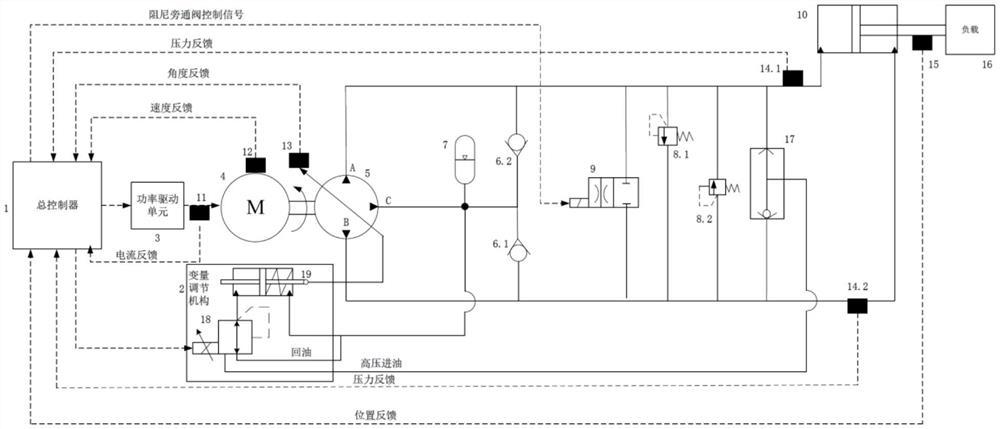
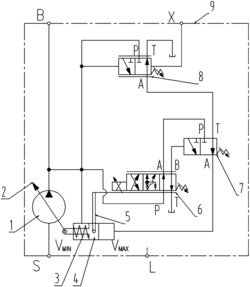
图2为本发明的VCR发动机曲轴连杆液压控制系统的原理框图;
图3为本发明的VCR发动机曲轴连杆液压控制方法的流程图;
图4为BP算法密度预测结果图。
具体实施方式
实施例一
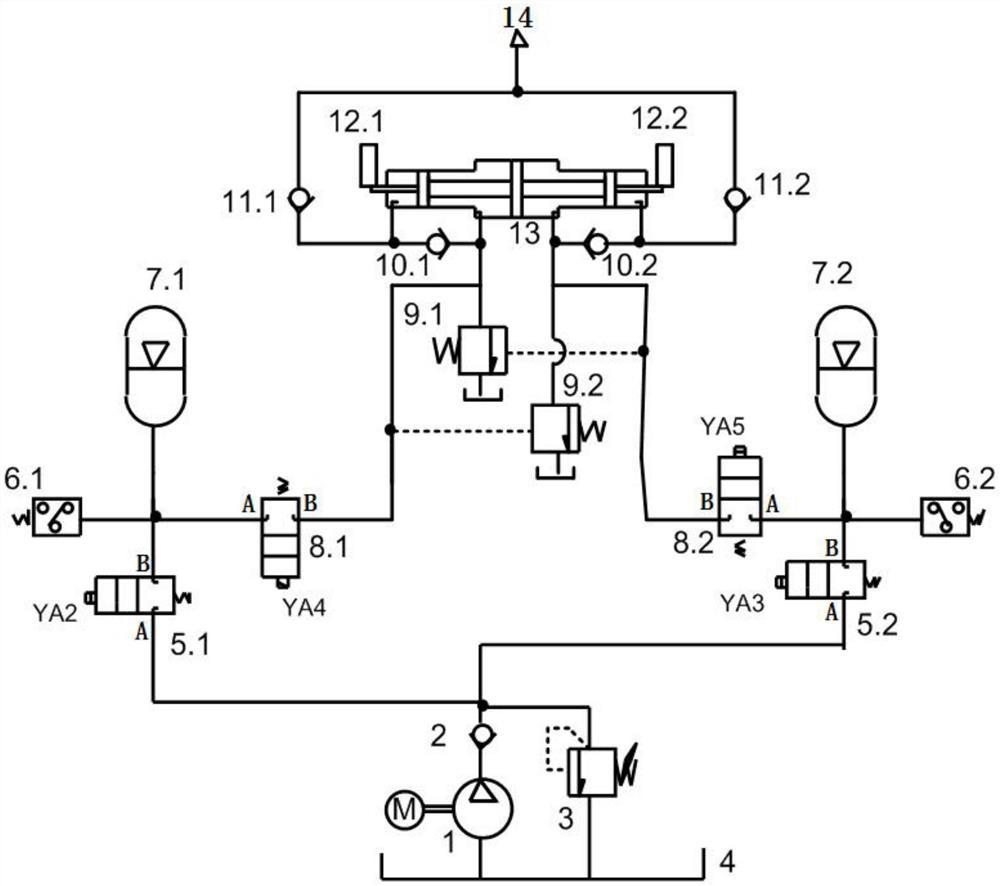
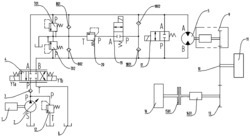
如图1和图2所示:本实施例的VCR发动机曲轴连杆液压控制系统,包括VCR连杆液压缸1、第一油路21和第二油路22,所述第一油路21的一端与VCR连杆液压缸1的无杆腔(即连杆不在的下部容腔)相连、另一端通过第一液压单向阀31与伺服阀4的左位液压回路相连;所述第二油路22的一端与VCR连杆液压缸1的有杆腔(即连杆所在的上部容腔)相连、另一端通过第二液压单向阀32与伺服阀4的右位液压回路相连;所述伺服阀4通过变量柱塞泵5与油箱6相连;
该系统还包括控制器71、用于采集发动机转速信息的发动机转速传感器72、用于采集节气门位置信息的节气门位置传感器73、用于采集连杆位置信息的位移传感器74、用于采集VCR连杆液压缸1缸内温度的缸内温度传感器75、用于采集VCR连杆液压缸1缸内压力的缸内压力传感器76、用于采集VCR连杆液压缸1缸外温度的缸外温度传感器77和用于采集VCR连杆液压缸1缸外压力的缸外压力传感器78;所述发动机转速传感器72、节气门位置传感器73、位移传感器74、缸内温度传感器75、缸内压力传感器76、缸外温度传感器77及缸外压力传感器78的信号输出端均与控制器71的信号输入端相连,所述伺服阀4、第一液压单向阀31、第二液压单向阀32及变量柱塞泵5的信号输入端均与控制器71的信号输出端相连。
该液压控制系统的工作原理为:VCR连杆液压缸1活塞杆伸出,当需要变大压缩比时,控制器71通过数值计算和相应的控制策略确定该工况下的活塞杆伸长量,控制器71发出伸出信号,系统开始供油,伺服阀4在控制器71发出的控制电流下开始工作,1YA得电,伺服阀4左位液压回路开通,第一液控单向阀解锁,VCR连杆伸长;同时,位移传感器74工作,将实时测量到的连杆位置信号反馈给控制器71,控制器71再通过运算发出指令控制伺服阀4的开口大小从而控制液压油的流量大小,最终确保连杆实际伸出量与要求伸出量相同,达到精确控制连杆位置的要求;到达预期位置后,伺服阀4快速断电回到中位,变量柱塞泵5卸荷,第一液控单向阀锁紧保持连杆的位置不变。VCR连杆液压缸1连杆伸出过程中的油液流动情况为:
进油路:变量柱塞泵5→伺服阀4(左位液压回路)→第一液控单向阀→VCR连杆液压缸1无杆腔;
回油路:VCR连杆液压缸1有杆腔→第二液控单向阀→伺服阀4(左位液压回路)→油箱6。
VCR连杆液压缸1连杆缩回时,同理,当控制器71根据发动机工况得出需要减小压缩比时,控制器71发出信号,伺服阀42YA得电,伺服阀4的右位液压回路开通,第二液控单向阀解锁,连杆在液压力的作用下回缩,该过程中油液流动情况为:
进油路:变量柱塞泵5→伺服阀4(右位液压回路)→第二液控单向阀→VCR连杆液压缸1有杆腔;
回油路:VCR连杆液压缸1无杆腔→第一液控单向阀→伺服阀4(右位液压回路)→油箱6。
本实施例中,所述伺服阀4与第一液压单向阀31、第二液压单向阀32之间设有蓄能器;蓄能器能够将工作介质的压力能转化为诸如势能等其他能量形式,并将其储存的能量转化;在适当的时机将蓄能器系统中的能量转变为压缩能或位能储存起来,当系统需要时,又将压缩能或位能转变为液压或气压等能而释放出来,重新补供给系统;当系统瞬间压力增大时,蓄能器吸收这部分的能量,以保证整个系统压力正常。
本实施例中,所述控制器71为STM32F103C8T6型单片机;STM32F103C8T6是由意法半导体公司生产的属于增强系列类型的32位微型控制器71,是一款功能较为强大的处理芯片,它能够实现本设计系统所需的信号采集、处理等功能。
电源对整个控制系统电路提供电能,是整个系统中十分重要的一环,其工作电路的设计对仪器稳定运行起着至关重要的作用,如果电源不稳定可能造成系统不能正常工作,严重的甚至烧坏芯片引发事故;因此,如何将电源有效分配给系统的不同组件越发显得重要;电源电路设计主要考虑用哪种类型的电源器件,输入输出电压,输出电流以及控制状态。本系统的液压控制电路的电力来源于车载电子12V供电控制系统,由固定输出三端稳压器MC78M05将电压稳压在5V;3.3V电压采用AMS1117产生,其最大的特点是简单易用,而且性价比高,输入电压5V~12V,直接输出3.3V。
在相关信号输入输出的过程中,可以通过特定的调理电路将传感器采集到的信号转换成对应的电压信号;然后,通过主控芯片STM32F103C8T6内置的模/数转换电路转换为数字量信号,以此信号作为单片机的输入信号;输入信号的信号调理电路都采用由双运算放大器LMV258构成的电压跟随器,来增大电压采集信号的稳定性,同时提高负载能力。
实施例二
本实施例的VCR发动机曲轴连杆液压方法,包括以下步骤:
步骤一、根据发动机转速传感器72和节气门位置传感器73,确定汽车的工况,根据不同的工况选择对应的压缩比,确定连杆的目标位移变化量x1;
步骤二、根据连杆的目标位移变化量x1和连杆的当前位移x2,得出对应的位移变化量Δx和缸内油液目标体积变化量V1;Δx=x1-x2,若Δx>0则进行进油流程,若Δx<0则进行出油流程;
步骤三、通过缸内温度传感器75和缸内压力传感器76测得的缸内温度T1和缸内压力P1,由T1、P1,得出对应的缸内油液密度ρ1;由缸内油液体积变化量V1和缸内油液密度ρ1,得出进油/出油质量m;
步骤四、通过缸外温度传感器77和缸外压力传感器78测得缸外温度T2和缸外压力P2;由T2、P2,得出对应的缸外油液密度ρ2;由进油/出油质量m和缸外油液密度ρ2,得出缸外进油/出油体积V2;
步骤五、根据缸外进油/出油体积V2的大小,选择高/低档位的伺服阀4控制电压U1/U2,并得出进油/出油时间t,进而控制进油/出油的体积,进行进油/出油操作;
步骤六、进油/出油操作完成后,根据位移传感器74的信号并根据位置反馈系统的处理,得到实际连杆位移x,进而得出实际缸内油液体积变化量V,根据m、V得出实际缸内油液密度ρ;
步骤七、根据缸内油液目标体积变化量V1和实际缸内油液体积变化量V,得到油液体积变化差值ΔV;
步骤八、若ΔV>5×10-5ml,则ΔV作为缸内油液目标体积变化量,重新进行步骤二至步骤七;若ΔV≤5×10-5ml,则结束。
进一步,在步骤一中,连杆的目标位移变化量x1通过以下方式确定:
当0<<ra<0.4且0<<n<1500rpm时,压缩比为24.8,x1=-0.921mm;
当0<<ra<0.4且n>>1500rpm时,压缩比为23.6,x1=-0.693mm;
当0.4<<ra<0.7且0<<n<1500rpm时,压缩比为19.6,x1=0.276mm;
当0.4<<ra<0.7且n>>1500rpm时,压缩比为18.5,x1=0.625mm;
当ra>>0.7且0<<n<1500rpm时,压缩比为17.6,x1=0.941mm;
当ra>>0.7且n>>1500rpm时,压缩比为16.9,x1=1.212mm;
其中,ra为通过节气门位置传感器73确定的发动机负荷,n为通过发动机转速传感器72确定的发动机转速。
其中,在步骤三和步骤四中,缸内油液密度ρ1及缸外油液密度ρ2均通过动态BP算法得出,动态BP算法中的训练数据库包含有一百种工况,一百种工况是根据发动机连杆工作环境所对应的温度和压力,分别选择横纵坐标各十个点而两两对应所确定的。
其中,在步骤六中,在得出实际缸内油液密度ρ后同时将其更新到动态BP算法的训练点数据库中。
其中,在步骤五中,若V2≥0.05ml则选择高电压U1,若V2<0.05ml,则选择低电压U2。
其中,BP神经网络是一种多层前馈型神经网络,网络中神经节点的传递函数是S型函数,它的输出量是从0到1之间的连续数据,它可以实现从输入层到输出层的任意非线性映射;由于神经网络对信息处理具有自组织、自学习、知识推理等特点,对非确定规律性系统具有自适应特征。神经网络可以利用对样本的训练实现从输入到输出的任意非线性函数对应关系的映射,并通过建立这种映射关系来体现对象的内在规律;BP神经网络是由输入层、至少一个隐含层和输出层三部分组成,每一层由一个或多个神经节点组成,每一层的神经节点只接收前一层神经元的输入,输入信息必须经过各层神经元的处理才会变为输出层的输出,即输入层接收外界的输入模式,隐含层的节点只会接受输入层信息输入,输出层的节点只会接受隐含层的信息输入。
BP神经网络的学习是依靠的是一种多层网络的"逆推"学习算法。它的训练学习由信息的正向传播与误差的反向传播两个过程组成。在信息进行正向传播时,从输入层传入的数据X(i),经过各个隐含层节点的处理后,经过非线性变换,从输出层输出信息Y(k),如果输出层的实际输出结果y(k)与期望的输出值t的偏差较大,则BP神经网络的学习过程就会转入到误差的反向传播过程,也就是将输出结果的误差值通过隐含层向输入层逐层反方向进行传播,在传播过程中将误差值分摊给各层中所有的神经节点,进而获得各层神经节点的信息,并以此信息作为修正各个神经节点的依据。通过不断的调整输入层和隐含层节点的联接强度Wij、隐含层和输出层节点的联接强度Tjk,使得输出结果的误差逐渐下降,这种信号的正向传播与误差的反向传播及各层权值调整过程是周而复始地进行的,而最终会使得输出层输出结果与初始设定的期望值保持一致。各层神经节点权值不断调整的过程,就是BP神经网络的训练和学习的过程。
应用newff函数建立BP网络结构,隐层神经元设置为10,输出层有一个神经元。选择隐层和输出层神经元的传递函数分别为tensig函数和purelin函数。进行训练之前需要预先设网络训练参数:最大迭代次数设置为100,学习率为0.1,收敛误差为0.00004,其他参数选择缺省值。液压油密度模型的BP算法Matlab实现的核心代码如下:
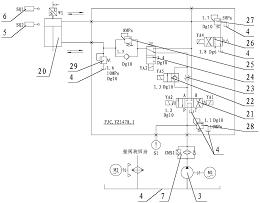
如图4所示,根据训练库中的密度样本,运用BP算法预测得到密度值与实际的密度精度为97.89%,满足系统设计目标。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
VCR发动机曲轴连杆液压控制系统及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0