









专利摘要
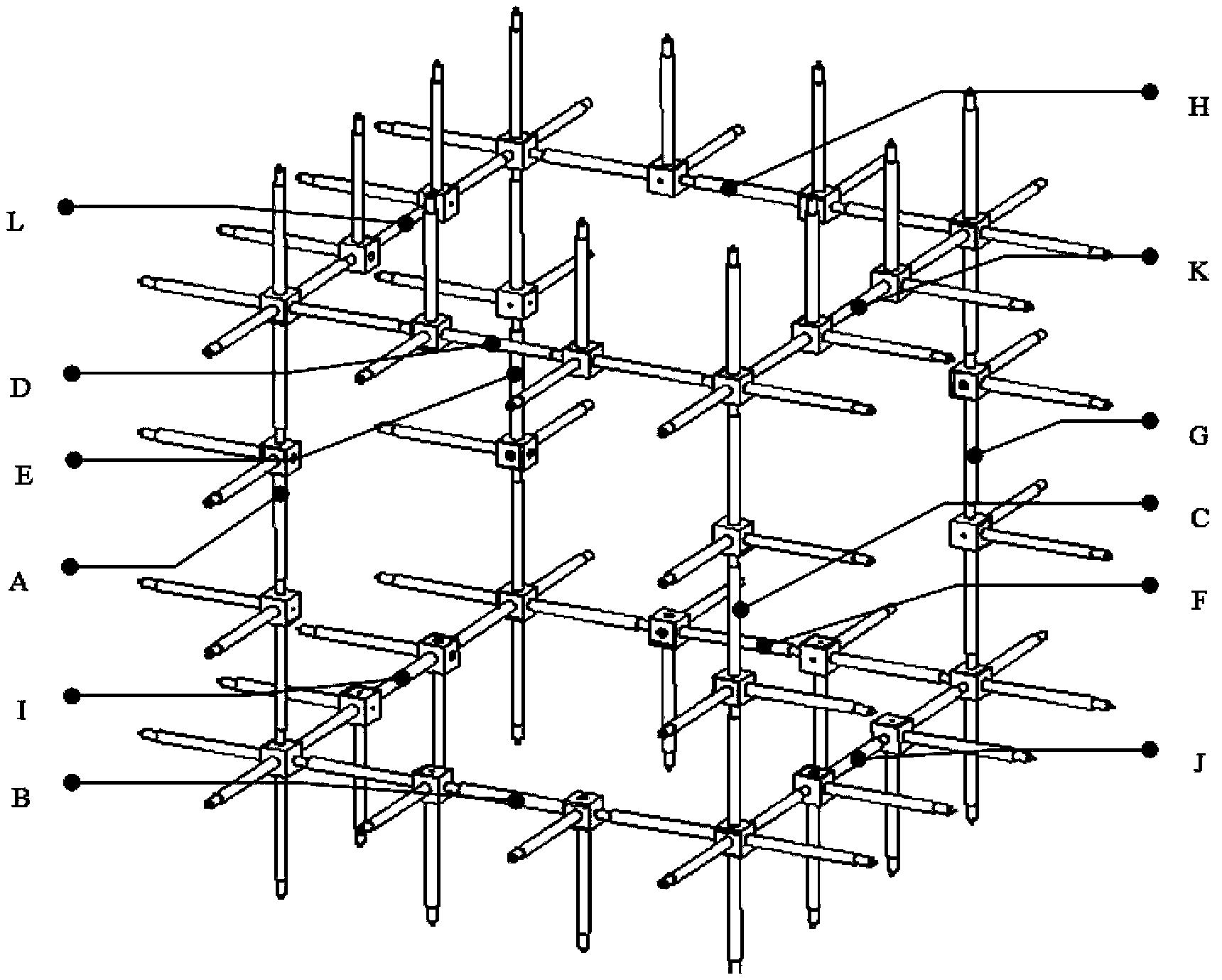
一种滚动六面体步行机构,该机构包括:第一支链(I)、第二支链(II)、第三支链(III)、第四支链(IV)、第一个十字杆(1)、第二个十字杆(14)。第一个十字杆的第一端与第一支链的第一滚动轴承(11)连接,第二端与第二支链的第六滚动轴承(27)连接,第三端与第三支链的C滚动轴承连接,第四端与第四支链的E滚动轴承连接。第二个十字杆的第一端与第一支链的第五滚动轴承(12)连接,第二端与第二支链的第三滚动轴承(26)连接,第三端与第三支链的D滚动轴承连接,第四端与第四支链的F滚动轴承连接。该发明采用闭链结构,增加机器人刚度,提高负载能力,结构和控制简单,机构在惯性作用下,能够实现平面内的移动和转向。
说明书
技术领域技术领域
本发明涉及一种滚动步行机构,具体涉及一种滚动六面体步行机构。该装置可用于军事领域中侦查、监视恐怖事件及排雷等。
技术背景背景技术
平面连杆机构中,结构最简单且应用最广泛的是有四个构件所组成的平面四杆机构。传统的四杆机构有两个连架杆,一个连杆及机架组成,这里机架是与地面固定的。这样在电机的旋转下,实现旋转或部分旋转输出。中国专利申请CN2789106Y公开了一种单动力滚动四杆机构。该机构由4根杆组成,并由一个电机驱动。将机架与地面脱离,机架在一个运动周期中有地面相对静止,而在向下一个周期过渡的过程中,机架与地面之间是脱离的。这样就使机架从四杆机构中解放出来,实现整个机构的平面运动,达到滚动前进的目的。但此设计只是在一个方向运动,不能实现转向,从而无法实现在平面内任意运动。
发明内容发明内容
本发明所要解决的技术问题:是在已有平面滚动四杆机构的基础上,增加一个与之相同的机构,从而实现空间两个方向的滚动,进而实现转向的功能。
本发明的技术方案:
一种滚动六面体步行机构,该机构包括,第一支链、第二支链、第三支链、第四支链、第一个十字杆、第二个十字杆。
第一个十字杆的第一端与第一支链的第一滚动轴承连接。
第一个十字杆的第二端与第二支链的第六滚动轴承27连接。
第一个十字杆的第三端与第三支链的C滚动轴承连接。
第一个十字杆的第四端与第四支链的E滚动轴承连接。
第二个十字杆的第一端与第一支链的第一滚动轴承连接;
第二个十字杆的第二端与第二支链的第三滚动轴承26连接。
第二个十字杆的第三端与第三支链的D滚动轴承连接。
第二个十字杆的第四端与第四支链的F滚动轴承连接。
本发明的有益效果:本发明所述的滚动六面体步行机构采用整体闭链机构,增加了该机构的刚度,当机器人承受负载时,各个杆件共同分担负载,是机器人各构件的受力分布更均匀,提高机器人本体的负载能力。同时实现空间两个方向的滚动,实现转向的功能。该机器人构件少,结构、控制简单。
附图说明附图说明
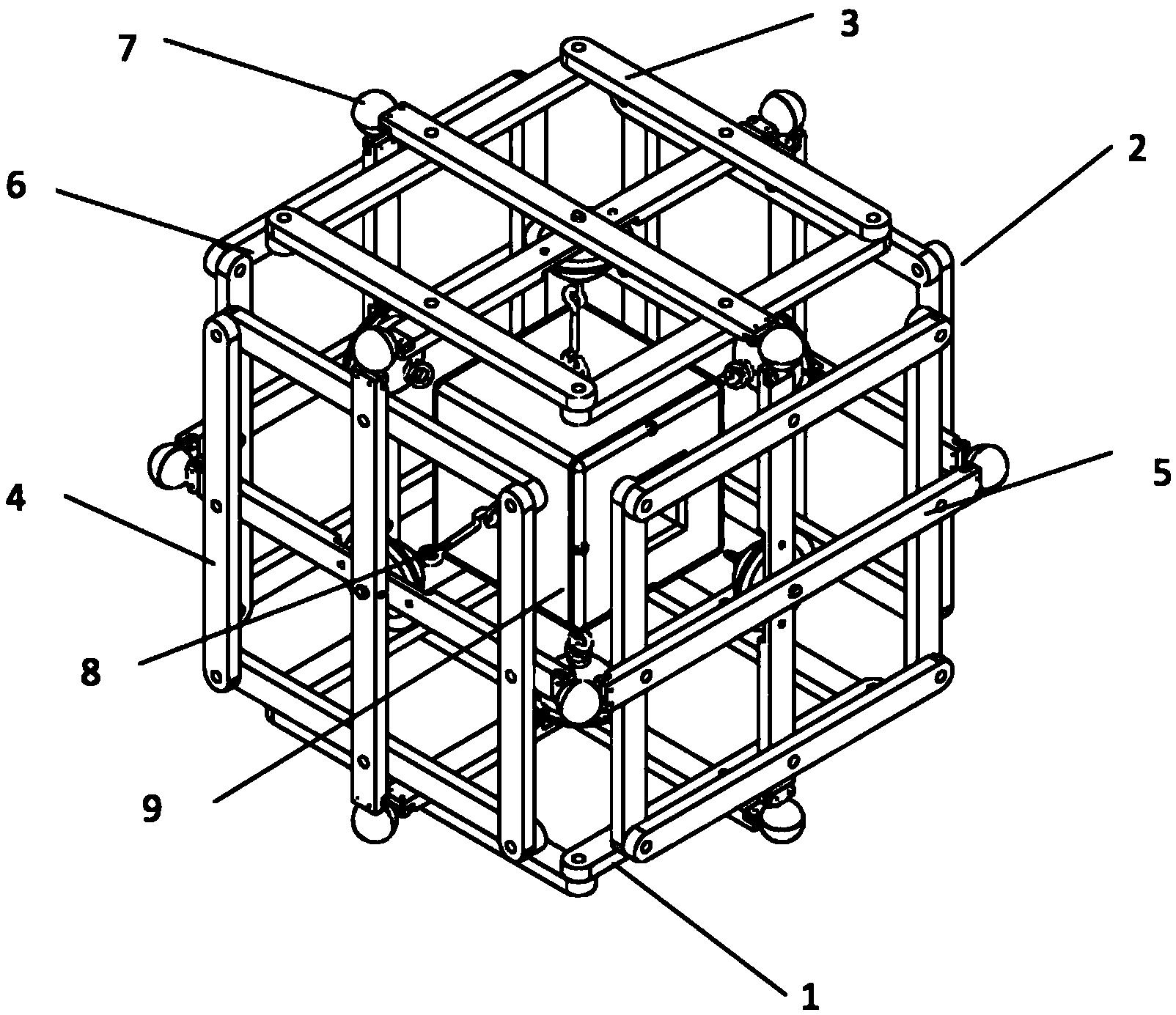
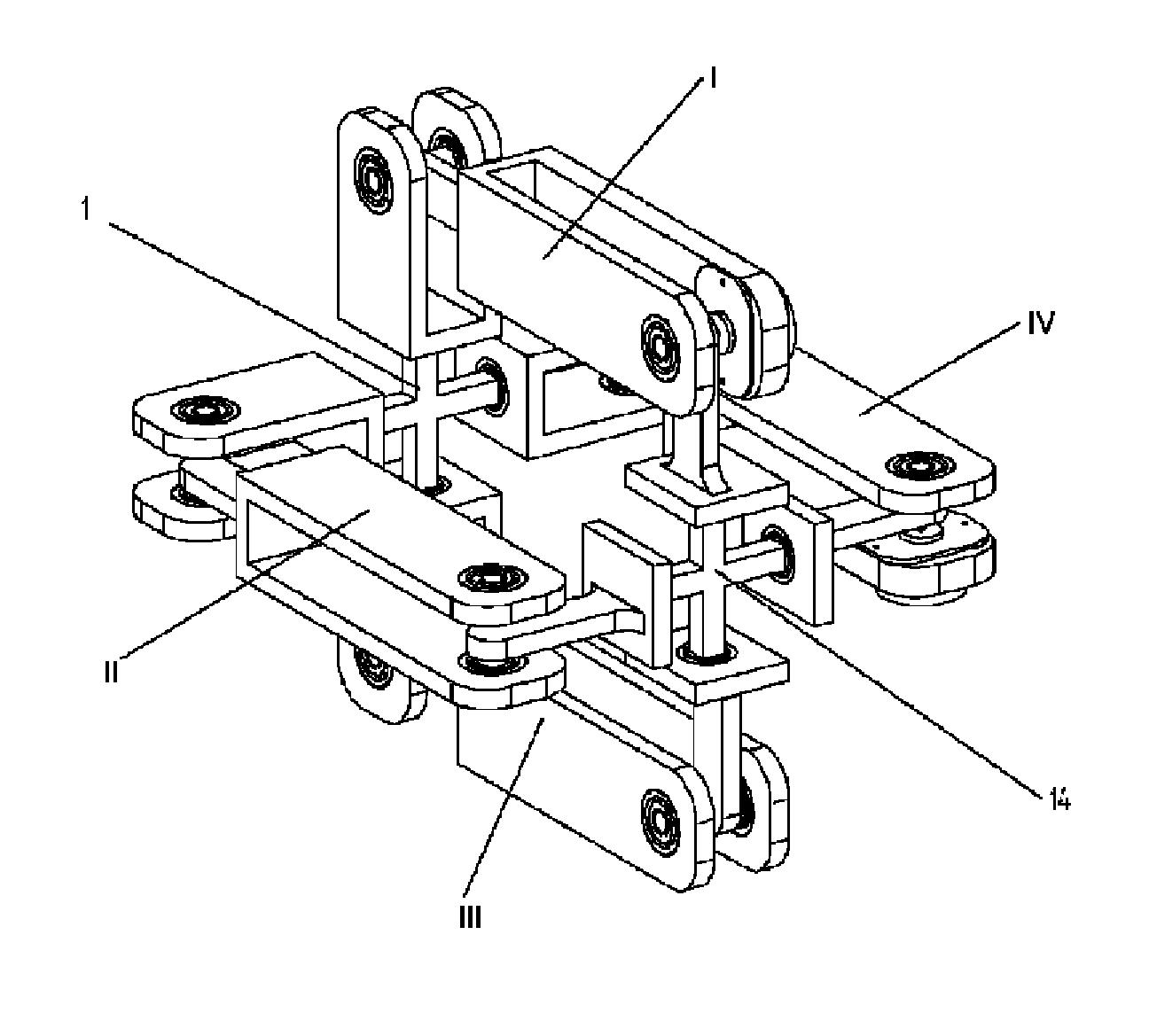
图1滚动六面体步行机构三维图。
图2第一支链三维图。
图3第一支链结构剖视图
图4连接电机轴主视图。
图5连接轴主视图。
图6第二支链三维图。
图7第二支链剖视图。
图8第三支链三维体图。
图9第四支链三维图。
图10第一和第二个十字杆十字杆三维图。
图中:第一支链(I),第二支链(II),第三支链(III),第四支链(IV),第一个十字杆1,第一支链的第一杆2,第一支链的第二滚动轴承3,第一支链的第三滚动轴承4,第一支链的第一连接轴5,第一支链的主杆6,第一支链的第四滚动轴承7、联接电机轴8,电机9,第一支链的第二杆10,第一支链的第一滚动轴承11,第一支链的第五滚动轴承12,第二个十字杆14,第二支链的第一杆17,第二支链的第一滚动轴承18,第二支链的第二滚动轴承19,第二支链的第一连接轴20,第二支链的主杆21,第二支链的第二连接轴22,第二支链的第四滚动轴承23,第二支链的第五滚动轴承24,第二支链的第二杆25,第二支链的第三滚动轴承26,第二支链的第六滚动轴承27。
具体实施方式具体实施方式
结合附图对本发明作进一步说明。
一种滚动六面体步行机构,该机构包括,第一支链I、第二支链II、第三支链III、第四支链IV、第一个十字杆1、第二个十字杆14,如图1,通过第一个十字杆和第二个十字杆,将四条支链连接在一起。具体连接如下:
第一个十字杆的第一端与第一支链的第一滚动轴承11连接。
第一个十字杆的第二端与第二支链的第六滚动轴承27连接。
第一个十字杆的第三端与第三支链的C滚动轴承连接。
第一个十字杆的第四端与第四支链的E滚动轴承连接。
第二个十字杆的第一端与第一支链的第五滚动轴承12连接。
第二个十字杆的第二端与第二支链的第三滚动轴承26连接。
第二个十字杆的第三端与第三支链的D滚动轴承连接。
第二个十字杆的第四端与第四支链的F滚动轴承连接。
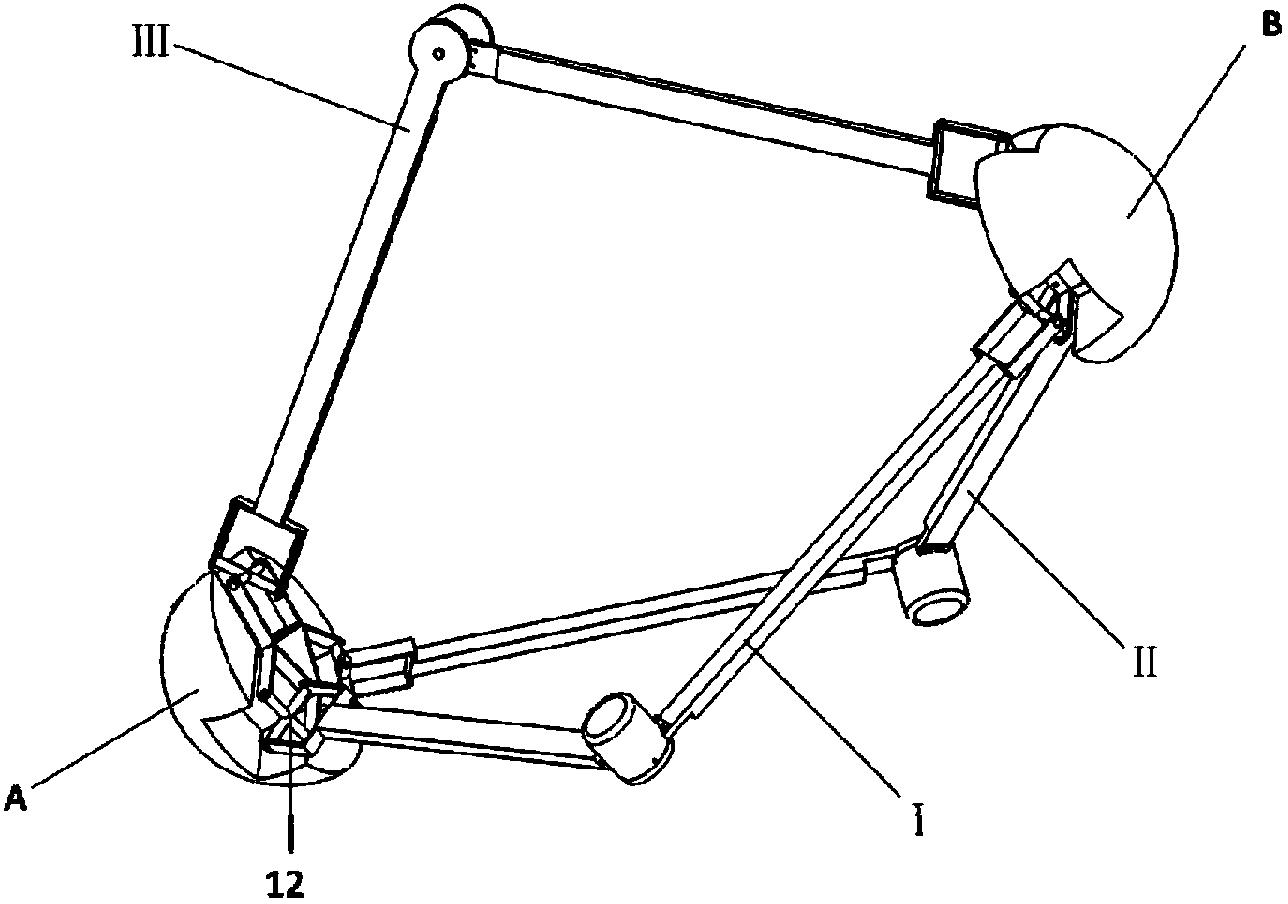
所述的第一支链I为安装电机的支链,如图2、3,它包括第一支链的第一杆2、第一支链的第一连接轴5、第一支链的主杆6、联接电机轴8、电机9、第一支链的第二杆10、第一支链的第一至第五滚动轴承11、3、4、7、12。
第一支链的第一杆的a端的通孔中安装第一支链的第一滚动轴承11,其b端两侧的通孔中分别安装第一支链的第二、三滚动轴承3、4。
第一支链的第一连接轴5安装于第一支链的第二、三滚动轴承3、4中。
第一支链的主杆6是一种Y型结构,其e端安装第一支链的第四滚动轴承7,电机9放置在第一支链的主杆d端的通孔中,并固定在其端上,联接电机接轴8的一端置于第一支链的第四滚动轴承7中,联接电机接轴8的另一端与电机9的轴固定连接。
第一支链的第二杆的g端安装第一支链的第五滚动轴承12,第一支链的第二杆的f端与联接电机接轴8通过顶丝固定。
第一支链的主杆的c端与第一支链的连接轴5通过顶丝固定。
第四支链IV,如图9,它与第一支链I的结构尺寸相同。第四支链的E滚动轴承用于与第一个十字杆的第四端连接。第四支链的F滚动轴承用于与第二个十字杆的第四端连接。
所述的第二支链II,如图6、7,它包括第二支链的第一杆17、第二支链的第一连接轴20、第二支链的主杆21、第二支链的第二连接轴22、第二支链的第二杆25、第二支链的第一至第六滚动轴承18、19、26、23、24、27。
第二支链的主杆21是一种Y型结构,其j端两侧的通孔中分别安装第二支链的第一、二滚动轴承18、19;第二支链的第一连接轴20安装于第二支链的第一、二滚动轴承18、19中。
第二支链的第一杆的h端的通孔中安装第二支链的第三滚动轴承26;第二支链的第一杆的i端与第二支链的第一连接轴20通过顶丝固定;
第二支链的第二杆25的L端两侧的通孔中分别安装第二支链的第四、第五滚动轴承23、24,第二支链的第二连接轴22的两端分别安装于第二支链的第四、第五滚动轴承23、24中。
第二支链的第二杆的m端安装第二支链的第六滚动轴承27。
第二支链的主杆的k端与第二支链的第二连接轴22通过顶丝固定。
第三支链III,如图8,它与第二支链II的结构、尺寸相同。第三支链的C滚动轴承用于与第一个十字杆的第三端连接。第三支链的D滚动轴承用于与第二个十字杆的第三端连接。
通过上述步骤完成滚动六面体机构的组装。
如图4所示。联接电机轴8为阶梯轴,o端中空,用于安放电机9的输出轴。在o端的径向设一螺纹孔,采用顶丝实现电机输出轴与联接电机轴8的固定。联接电机轴8的中间与第一支链的第二杆10的f端采用顶丝固定;联接电机轴8的n端与第一支链的的第四滚动轴承7连接。
四个支链上连接轴的结构和尺寸均相同,如图5,均为两端直径相同的台阶轴。其两端用于与滚动轴承的连接。
第一和第二个十字块(1、14),如图10,其十字块的四个端头为与滚动轴承配合的圆柱形。
运动的连续性由机构本身惯性以及对电机的控制实现,滚动翻转前进。机构运动时,保持只有一个电机通电。当只有一个电机通电时,滚动六面体机构的运动方式与平面四杆机构的运动方式相同。当要转换方向时,将机构恢复到正方体形态,停止当前运动的电机,将另一电机通电,从而实现方向的变换。
一种滚动六面体步行机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0