







专利摘要
本实用新型公开了一种自动瞄准射击的模拟电磁曲射炮电路,包括:主控模块,与主控模块电连接的显示模块、输入模块、探测模块、云台舵机、探测模块的转向舵机和放电电容,其中放电电容安装在云台舵机上,探测模块安装在探测模块的转向舵机上。本实用新型所公开的电路,可以对2~3米的目标进行比较精准的打击,误差在5cm以内,可以通过按键输入距离、角度等参数,控制炮击的目标,也可以设置自动寻靶炮击,通过OLED进行人机交互,使操作更为方便。也可使用蓝牙进行操作。
权利要求
1.一种自动瞄准射击的模拟电磁曲射炮电路,其特征在于:包括主控模块,与主控模块电连接的显示模块、输入模块、探测模块、云台舵机、探测模块的转向舵机和放电电容,其中放电电容安装在云台舵机上,探测模块安装在探测模块的转向舵机上。
2.根据权利要求1所述自动瞄准射击的模拟电磁曲射炮电路,其特征在于:主控模块采用STM32F103C8T6单片机。
3.根据权利要求1所述自动瞄准射击的模拟电磁曲射炮电路,其特征在于:显示模块采用OLED。
4.根据权利要求1所述自动瞄准射击的模拟电磁曲射炮电路,其特征在于:输入模块采用按键输入、蓝牙遥控输入或者将显示模块设为触摸屏。
5.根据权利要求1所述自动瞄准射击的模拟电磁曲射炮电路,其特征在于:探测模块为GP2Y0A21YK0F红外测距传感器。
6.根据权利要求1所述自动瞄准射击的模拟电磁曲射炮电路,其特征在于:云台舵机包括一个控制水平方向运动的舵机和一个控制垂直方向运动的舵机。
7.根据权利要求1所述自动瞄准射击的模拟电磁曲射炮电路,其特征在于:放电电容采用250V耐压值,2200uf的电解电容。
说明书
技术领域
本实用新型涉及电路设计领域,具体的说涉及该领域内的一种自动瞄准射击的模拟电磁曲射炮电路。
背景技术
电磁炮的炮弹发射原理是将根据电磁感应原理产生的推力转化成轨道上弹丸的动能,普通炮的炮弹发射原理是火药的化学反应将化学能转化为炮管中弹丸的动能。电磁炮可以曲射。为了更好的研究电磁炮的炮弹发射,需要模拟电磁曲射炮的炮弹发射。模拟电磁曲射炮在军事、工业等方面都有实际应用意义。
实用新型内容
本实用新型所要解决的技术问题,就是提供一种自动瞄准射击的模拟电磁曲射炮电路。
为了解决上述技术问题,本实用新型采用如下技术方案:
一种自动瞄准射击的模拟电磁曲射炮电路,其改进之处在于,包括:主控模块,与主控模块电连接的显示模块、输入模块、探测模块、云台舵机、探测模块的转向舵机和放电电容,其中放电电容安装在云台舵机上,探测模块安装在探测模块的转向舵机上。
进一步的,主控模块采用STM32F103C8T6单片机。
进一步的,显示模块采用OLED。
进一步的,输入模块采用按键输入、蓝牙遥控输入或者将显示模块设为触摸屏。
进一步的,探测模块为GP2Y0A21YK0F红外测距传感器。
进一步的,云台舵机包括一个控制水平方向运动的舵机和一个控制垂直方向运动的舵机。
进一步的,放电电容采用250V耐压值,2200uf的电解电容。
本实用新型的有益效果是:
本实用新型所公开的电路,可以对2~3米的目标进行比较精准的打击,误差在5cm以内,可以通过按键输入距离、角度等参数,控制炮击的目标,也可以设置自动寻靶炮击,通过OLED进行人机交互,使操作更为方便。也可使用蓝牙进行操作。
附图说明
图1是本实用新型实施例1所公开电路的组成框图;
图2是STM32F103C8T6微控制器的管脚分布图;
图3是OLED显示屏管脚分布图;
图4是按键引脚连接示意图;
图5是蓝牙模块管脚分布图;
图6是红外测距传感器模块的工作原理图。
具体实施方式
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
模拟电磁曲射炮的核心是出射的初速度控制和由云台调整的斜抛曲线。
物体以一定的初速度斜向射出去,在空气阻力可以忽略的情况下,物体所做的这类运动就是斜抛运动。斜抛运动的运动特性为:斜抛运动的轨迹是抛物线,抛物线会产生稳定的水平轨迹;斜抛运动的加速度是重力加速度,故斜抛运动是匀变速运动;斜抛运动具有对称性;在斜抛运动过程中,只有重力做功,机械能守恒。
斜抛运动能达到的最大高度h:
其中,Vo为抛出速度,θ为速度与水平面夹角,g为重力加速度。
在忽略空气阻力的条件下,分解速度,则有:
水平方向的速度V1是:V1-V0·cosθ;
竖直方向的速度V2是:V2=V0·sinθ-st,其中,t为抛出的时间;
水平方向的位移x是:x-V0·t·cosθ;
竖直方向的位移y是:
当V2=0时,小球达到最高点;由公式V2=V0·sinθ-gt可得,当V2=0时,小球达到最高点所用时间T最高为:
当小球抛出点和降落点位于同一水平面时,
小球运动时间为:
小球的水平射程是:
当θ=45°时,2θ=90°,sin2θ有最大值,即斜抛运动的倾角为45度时,射程最远。本实用新型通过控制弹丸的初动能和角度来控制斜抛运动的轨迹,具体而言,通过电容瞬时放电产生的电压给线圈充电从而转化为弹丸的初动能,通过云台控制弹丸的垂直方向仰角。
实施例1,如图1所示,本实施例公开了一种自动瞄准射击的模拟电磁曲射炮电路,包括主控模块1,分别与主控模块电连接的显示模块2、输入模块3、探测模块4、云台舵机5、探测模块的转向舵机6和放电电容7,其中放电电容安装在云台舵机5上,探测模块安装在探测模块的转向舵机6上。
主控模块1采用单片机,具体可采用STM32F103C8T6单片机。由STM32F103C8T6来对整个系统进行统一控制和数据处理。STM32F103C8T6是一款基于ARM Cortex-M内核STM32系列的32位的微控制器,程序存储器容量是64KB,需要电压2V~3.6V,工作温度为-40℃~85℃。STM32F103C8T6单片机程序是模块化,接口相对简单,运算速度快,硬件资源丰富,是32位的高性能处理器,使用方便,性价比高。图2是STM32F103C8T6微控制器管脚分布图。
显示模块2采用有机电激光(OLED)显示屏。OLED(Organic Light-EmittingDiode,又称有机电激发光显示、有机发光半导体)是有机发光二极管的英文缩写。其是一种利用多层有机薄膜结构产生电致发光的器件,只需要低的驱动电压,这些特征使得OLED在满足平面显示器的应用上显得非常突出。OLED显示屏比LCD更轻薄、亮度高、功耗低、响应快、清晰度高、柔性好、发光效率高,显示清晰,内容丰富、信息量大,使用方便。如图3所示,OLED显示屏共有四个引脚,采用I2C通信方式。I2C是inter-integrated circuit的缩写,又名为TWI,只需要用两条物理线进行数据传输,分别命名为SDA和SCL,用于传输serial data和serial clock。OLED显示屏的引脚3即SCL引脚连接STM32F103C8T6单片机的B10引脚;OLED显示屏的引脚4即SDA引脚连接STM32F103C8T6单片机的B11引脚;OLED显示屏的VCC引脚和GND引脚分别连接STM32F103C8T6单片机的正电源引脚(3.3V)和电源地引脚(GND)。
输入模块3采用按键输入或者蓝牙遥控输入。输入的内容是在程序中预先设置好的参数,每个按键都有一个在程序中预先设定好的功能,分别是抬高电磁曲射炮的角度、降低电磁曲射炮的角度和发射按键。如果显示模块是触摸屏,输入模块采用在触摸屏上输入。如图4所示,按键输入的三个按键KEY1、KEY2和KEY3的硬件连接方式为一端共地,三个按键另一端即B12、B13和B14分别连接STM32F103C8T6单片机的B12、B13、B14引脚。如图5所示,蓝牙遥控输入的硬件连接方式为蓝牙模块的TX和RX引脚分别连接STM32F103C8T6单片机的A9和A10引脚。蓝牙模块与手机中的蓝牙模块配对后,通过手机的操作界面完成输入,手机的操作界面涉及抬高电磁曲射炮的角度、降低电磁曲射炮的角度和发射,手机通过蓝牙通信将输入的内容发送到单片机。
探测模块4采用红外测距传感器,具体可采用GP2Y0A21YK0F。GP2Y0A21YK0F是测距传感器单元,包括由位移距离传感器position sensitive detector(PSD)组合构成的位置敏感检测器。GP2Y0A21YK0F采用了三角测量的方法,距离检测不易受到环境温度和日光光照的影响。由于GP2Y0A21YK0F能够检测距离,所以这个传感器也可以用作接近传感器。
GP2Y0A21YK0F模块有三个引脚,分别是VCC、GND、VO引脚。GP2Y0A21YK0F模块的VCC引脚和GND引脚分别连接STM32F103C8T6单片机的正电源引脚(3.3V)和电源地引脚(GND)。VO引脚连接STM32F103C8T6单片机的A0引脚。
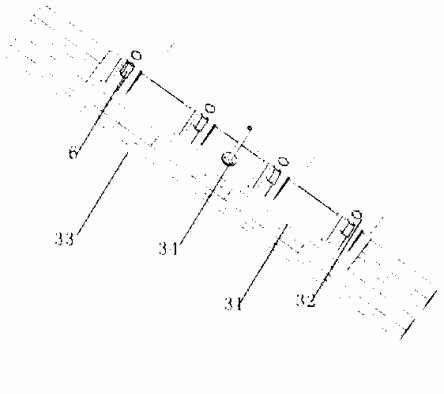
本实用新型包括三个舵机。云台舵机5包括一个控制水平方向运动的舵机和一个控制垂直方向运动的舵机。采用脉冲宽度调制(Pulse width modulation,PWM)信号控制。脉冲宽度调制是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。第三个舵机称为探测模块的转向舵机6,探测模块的转向舵机6搭载探测模块4,探测模块4采用红外测距传感器。模拟电磁曲射炮根据红外测距传感器寻找引导标识。单片机控制云台舵机5中的水平方向运动的舵机转动,使其与探测模块的转向舵机6转动相同角度。
三个舵机的硬件连接方式相同,均为三线输入。三个舵机的VCC引脚和GND引脚分别连接STM32F103C8T6单片机的正电源引脚(3.3V)和电源地引脚(GND),输入端分别连接STM32F103C8T6单片机的A1、A2和A3引脚。
放电电容7采用采用耐压值250V,容量2200uf的电解电容。
电解电容充电时用(另外的)直流稳压电源80V进行充电,具体操作为直流稳压80V电源正极连接电解电容的正极,电源负极连接电解电容的负极。经过实践验证充电时长3秒左右,即直流稳压电源闭合后3秒断开充电电路的开关。放电时用1.3V电压触发双向可控硅进行放电,双向可控硅的作用是用小电压来控制大电压。双向可控硅有三个引脚,分别是阳极、阴极和控制极。将1.3V电压连接控制极,绕制线圈的一端连接阳极,绕制线圈的另一端连接电解电容,电解电容的另一端连接阴极。当有1.3V的电压作用于控制极时,阳极和阴极就会导通,开始放电过程。起到了小电压控制大电压的作用。当发射按键KEY3按下时,单片机的B15引脚输出高电平(3.3V),可通过降压模块将3.3V降压到1.3V后输出至控制极。
电磁曲射炮的关键就是电解电容瞬间放电的电荷通过缠绕线圈瞬间产生的安培力将炮弹吸出炮管。安培力(Ampere's force)是通电导线在磁场中受到的作用力。安培力与电解电容的容量和耐压值、绕制线圈的内阻有关。电解电容释放过程的瞬间电压和绕制线圈的内阻都决定着瞬时电流的大小,瞬时电流越大,安培力也就越大,炮弹的飞行轨迹就越远。故电解电容的容量和耐压值尤为关键,绕制线圈的内阻也很关键。在绕制线圈时,需考虑线圈本身产生的磁场(磁阻)影响。采用并行绕制的方法。每绕完一层粘接,例如使用AB胶或502胶水粘紧,防止松散,影响下一层的线圈绕制。炮管采用了内径为1CM的硬质吸管,能够保证刚度和长度比例。炮管的作用是限制弹丸的飞行轨迹。弹丸采用了可拆卸的螺丝刀头。经过实践,长方形的磁导物体比球形的效果好。
引导标识是一块高度为50CM,直径25CM的圆形牌,放置在标靶正后方。标靶是由半径递增的同心圆构成,放置在引导标识的正前方地面。
单片机通过控制探测模块的转向舵机6来控制探测模块(红外测距传感器)的方向。红外测距传感器通过寻找引导标识来采集标靶位置信息,红外测距传感器的输出是数字电压量。随着探测模块的转向舵机6的水平转动,红外测距传感器也随之转动,当单片机检测到红外测距传感器传回的数字电压量为最大值时,此时的红外测距传感器(发射红外线)的方向即为引导标识的方向,记录此时探测模块的转向舵机6转动的角度。红外测距传感器也可检测引导标识距离红外测距传感器的距离。
单片机发送控制信号到云台舵机5,通过调节云台舵机5中的控制水平方向运动的舵机的信号占空比来调节云台舵机5中的控制水平方向运动的舵机角度。特别的,在初始状态时,将红外测距传感器的水平方向和云台舵机5上炮筒的水平方向设置为相同。当单片机检测到红外测距传感器传回的数字电压量最大值时,记录此时探测模块的转向舵机6转动的角度,单片机发送控制信号到云台舵机5,通过调节云台舵机5中的控制水平方向运动的舵机的占空比来调节云台舵机5中的控制水平方向运动的舵机角度,使云台舵机5中的水平方向的舵机角度与探测模块的转向舵机6水平方向的舵机角度相同。
单片机发送控制信号到云台舵机5,通过调节云台舵机5中的控制垂直方向运动的舵机的信号占空比来调节云台舵机5中的控制垂直方向运动的舵机角度。
单片机通过控制水平方向运动的舵机角度和控制垂直方向运动的舵机角度从而控制电磁曲射炮的水平夹角和垂直方向仰角。显示模块2可以显示云台舵机5的控制水平方向运动的舵机角度和控制垂直方向运动的舵机角度。可以根据大量数据的测量和实践设定单片机上电复位时电磁曲射炮的初始仰角。在调试云台舵机5的垂直方向仰角和所对应的射程距离时,不能一直升高或者降低角度,应该在降低时,先抬高一定的角度,再降低一定的角度;在升高时,先降低一定的角度,再升高一定的角度。当引导标识位于电磁曲射炮正前方时,实际测量标靶正中心和模拟曲射炮发射点的距离,可将该距离转化为电磁曲射炮的垂直方向仰角。在具体实现的过程中,通过按键KEY1、KEY2输入到单片机内,单片机再控制云台舵机5的控制垂直方向运动的舵机的信号占空比,从而改变电磁曲射炮的垂直方向仰角,以达到击中靶心的目的。当引导标识的位置发生改变时,先利用红外测距传感器寻找引导标识采集标靶位置信息,调整水平夹角,后重复上述操作。标靶正中心和电磁曲射炮发射点的实际距离与控制垂直方向运动的舵机的信号占空比对应关系在表格中给出。
在固定云台舵机5的水平方向(即固定云台舵机5中的控制水平方向运动的舵机的角度)的前提下,可以通过手机输入蓝牙遥控改变PWM云台的垂直方向仰角来改变弹丸斜抛轨迹。
实施例所公开的电路,以STM32F103C8T6作为主控模块1,红外测距传感器作为标靶的探测模块4,高耐压电容作为蓄能模块,使用单片机控制可控硅的通断,使电容瞬间给绕制线圈通电后产生强大磁场射出弹丸。双自由度的云台舵机5可对炮管垂直俯仰角进行调节,从而对弹道进行控制,以便更加精准打击目标。经实测表明可以对2~3米的目标进行比较精准的打击,误差在5cm内,实现了手动输入参数和自动寻靶瞄准射击。
测试结果及分析:PWM分为10000份,定X为700份不变,Y轴数字代表给定的PWM数值,测试数据(CM)为弹丸的水平距离。
脉宽调制(PWM)的基本原理是输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形。按一定的规则对各脉冲的宽度进行调制,即可改变电路输出电压的大小,也可改变输出频率。
其中X代表在程序中给X轴水平方向舵机的PWM份数。
表格中Y代表给固定云台舵机5中的控制垂直方向运动的舵机的PWM份数。
表格说明:固定云台水平方向角度,改变云台垂直方向角度,记录每次弹丸的落点。通过对数据的观察(测试数据的中位数),可知云台垂直方向角度与弹丸落点之间的对应关系。这样,在给定标靶距离时,就可根据上述对应关系来调整云台垂直方向角度(误差范围5CM)。
一种自动瞄准射击的模拟电磁曲射炮电路专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






















动态评分
0.0