






专利摘要
本实用新型公开了一种综采工作面煤岩识别装置,该装置包括安装在采煤机上的惯性导航装置、箱体、安装在采煤机行走部的轴编码器、安装在箱体上设有的舵机一端的卤素灯座、安装在舵机另一端的准直镜、与所述舵机信号连接舵机控制板、电源、和与所述舵机控制板和近红外光谱仪信号连接的嵌入式工控机。本实用新型解决了采煤机在工作时不能自适应调整滚筒截割高度的问题,把采煤机的控制由开环控制变成了闭环控制,提高了采煤机采煤的效率和可靠性。
权利要求
1.一种综采工作面煤岩识别装置,其特征在于,包括:
惯性导航装置,安装在采煤机上,用于获取采煤机的姿态数据;
轴编码器,安装在采煤机的行走部,用于获取采煤机的行进速度数据;
箱体,安装在采煤机上,箱体上设有舵机;
卤素灯座,安装在舵机的一端,卤素灯座上安装有卤素灯;
准直镜,安装在舵机的另一端,准直镜通过光纤与安装在所述箱体内的近红外光谱仪连接,所述近红外光谱仪用于对煤壁的光谱数据进行实时采集;
舵机控制板,与所述舵机信号连接;
嵌入式工控机,与所述舵机控制板和近红外光谱仪信号连接;
电源,为所述舵机、卤素灯、近红外光谱仪、舵机控制板以及嵌入式工控机供电。
2.根据权利要求1所述的综采工作面煤岩识别装置,其特征在于,所述箱体为防爆箱体,防爆箱体内部设置所述近红外光谱仪、舵机控制板和嵌入式工控机。
3.根据权利要求1所述的综采工作面煤岩识别装置,其特征在于,所述舵机为防爆型双头舵机。
4.根据权利要求1所述的综采工作面煤岩识别装置,其特征在于,所述卤素灯座为隔爆型卤素灯座。
说明书
技术领域
本实用新型涉及一种综采工作面煤岩识别装置及方法,属于煤炭智能化开采领域。
背景技术
煤层顶板分界线的精准识别是实现智能工作面、无人工作面的关键技术。
目前,采煤机工作时主要依靠采煤机司机的视觉和听觉对采煤机的截割滚筒进行调高,由于井下粉尘水雾浓度高,噪音污染严重,采煤机司机对采煤机摇臂不能进行精准的调节,从而形成欠挖或者过挖的情况,造成资源的浪费和一定的安全隐患,由于我国的地质条件复杂,煤岩种类繁多,国外较为成熟的技术难以在国内推广。例如γ射线只能在国内20%的矿井使用,系统普适性差,维护成本较高。现有的煤岩的技术成本太高,识别率过低,识别时间长,煤岩界面传感器的结构复杂,改造成本高。例如在应力截齿法中,需要对采煤机滚筒进行机械改造,加装测力截齿和测力传感器,而在实际工况中,采煤机在截割到较硬矸石的时候,会出现截齿脱落的情况。现有的煤岩识别技术更多的是考虑煤岩的物理特性,而物理特性在识别过程中的识别准确率差,容易和其他客观因素耦合。例如在截割到颜色、硬度差不多的煤和矸石的时,只凭物理特性很难辨别。采煤机工作情况下环境差。粉尘大、噪音大、采煤机振动剧烈等恶劣的工作环境影响着识别的可靠性和识别速率和识别精度。例如基于表面图像分析的方法中,因为粉尘的巨大,导致所用的工业相机无法清晰的拍摄煤壁的实时状况,导致识别可靠性差甚至无法识别的情况。
我国的地质情况复杂多变,同一个矿区煤层类型结构复杂多变,要对煤层顶板进行实时的精准识别,需要一种能直接鉴定物质化学性状的方法,从物质的本质上对煤和岩石进行区分,从而使采煤机能自适应的调整采高,实现采煤装备的智能化。
随着20世纪80年代高光谱遥感技术的快速发展,各种光谱设备出现,这种基于物质原子能量变换从而产生光电效应的技术逐渐被人们所熟知。目前,高光谱遥感技术已经成功的应用于地质资源勘探,矿山矿物填图等领域,根据该技术的启发,我们用便携式的光纤近红外光谱仪类比于遥感卫星高光谱仪,对工作面进行实时的“遥感”监测,通过对各个矿区典型煤岩的光谱数据库的建立,根据不同煤岩种类具有的不同的波谱特性,实现工作面煤岩界面的识别。
煤岩识别系统是将矿工的经验化操作转变为机械化数字化信息化操作的一种技术。其显著特征是通过建立数学模型并编程实时的将煤岩分界线数据传给总控制台,从而有效的解决采煤机滚筒的自动调高问题。
发明内容
本实用新型针对综采工作面的截割过程中无法自适应调高的问题,提出了一种综采工作面煤岩识别装置,以便于实现工作面的煤岩分界线的识别,并可以为采煤机提供自动调高数据,为采煤机的牵引速度和滚筒截割转速调节提供依据。
为了实现上述目的,本实用新型采用了如下的技术方案,
一种综采工作面煤岩识别装置,包括:
惯性导航装置,安装在采煤机上,用于获取采煤机的姿态数据;
轴编码器,安装在采煤机的行走部,用于获取采煤机的行进速度数据;
箱体,安装在采煤机上,箱体上设有舵机;
卤素灯座,安装在舵机的一端,卤素灯座上安装有卤素灯;
准直镜,安装在舵机的另一端,准直镜通过光纤与安装在所述箱体内的近红外光谱仪连接,所述近红外光谱仪用于对煤壁的光谱数据进行实时采集;
舵机控制板,与所述舵机信号连接;
嵌入式工控机,与所述舵机控制板和近红外光谱仪信号连接;
电源,为所述舵机、卤素灯、近红外光谱仪、舵机控制板以及嵌入式工控机供电。
所述箱体为防爆箱体,防爆箱体内部设置所述近红外光谱仪、舵机控制板和嵌入式工控机。
所述舵机为防爆型双头舵机。
所述卤素灯座为隔爆型卤素灯座。
所述的综采工作面煤岩识别装置的识别方法,包括如下步骤:
S1、采煤机运动时舵机控制板控制舵机面对煤壁做往复的扫描运动,同时,舵机控制板实时的把扫描角度反馈到嵌入式工控机,近红外光谱仪在扫描过程中实时的对煤壁进行光谱数据的采集;
S2、嵌入式工控机中内嵌有煤岩识别软件,所述煤岩识别系统软件二值化煤岩,把煤标志设为“0”岩的标志设为“1”,接收光谱数据,同时,通过煤岩识别的算法来实时的对所采集的数据进行煤岩识别,所述煤岩识别的算法具体如下:
运用光谱角度匹配的算法,计算所测目标光谱与标准光谱库的广义夹角,判定所测目标的类型,最终实现对煤岩的识别:
广义夹角为:
即:
式中,X为被测目标光谱向量;Y为标准光谱库向量;X、Y均不为零;
当识别结果标志点从“0”变为“1”或者从“1”变为“0”时,设此时刻为 j时刻,由嵌入式工控机记录舵机控制板在j时刻所反馈的扫描角度;
煤岩识别系统软件通过采煤机距煤壁的距离L及扫描角度θj实时的解算该分界点在采煤机坐标系下的位置并返回该数据;
S3、嵌入式工控机中通过定位系统软件实时接收所述惯性导航装置获取的采煤机的姿态数据、以及轴编码器获取的采煤机的行进速度数据,并通过航位推算算法实时解算采煤机在局部地理坐标系下的坐标,当煤岩识别软件反馈煤岩分界点的扫描角度时,通过当前位置采煤机的坐标解算煤岩分界点的坐标,拟合煤岩分界点为煤岩分界线。
步骤S3中解算煤岩分界点的坐标,拟合煤岩分界点为煤岩分界具体步骤如下:
S3-1、嵌入式工控机读取惯导所返回的采煤机航向角α、俯仰角β;
S3-2、通过航位推算实时解算采煤机在局部地理坐标系下的坐标Sg(Xg,Yg, Zg)T行进轨迹,其满足如下的关系式:
式中i表示i时刻;X、Y、Z分别为局部地理坐标系下的Xg、Yg、Zg,T是采样周期,vi是i时刻轴编码器输出的速度值,αi和βi分别是i时刻惯导的航向角和俯仰角;
S3-3、当煤岩识别软件在j时刻检测到煤岩分界点时,返回舵机的扫描角度θj,在采煤机坐标系下,煤岩分界点坐标Sb1(Xb1,Yb1,Zb1)T和采煤机Sb(Xb,Yb, Zb)T满足以下关系式:
式中,L为准直镜镜头到煤壁的垂直距离,S为准直镜镜头到采煤机机身上的垂直距离;
S3-4、采煤机定位软件根据煤岩分界点j时刻(i=j)的局部地理坐标系下的采煤机坐标Sg(Xg,Yg,Zg)T解算煤岩分界点在局部地理坐标系下的坐标Sg1 (Xg1,Yg1,Zg1)T,如式3所示,根据煤岩分界点的坐标拟合出煤岩分界线;
S3-5、重复步骤S3-1~步骤S3-4,实现采煤机的运动轨迹的建立和煤岩分界线的建立。
相对于现有技术,本实用新型一种综采工作面煤岩识别装置及识别方法具有以下有益效果:
本实用新型一种综采工作面煤岩识别装置及识别方法引入了嵌入式工控机作为数据处理平台,把采煤机控制器软件、采煤机定位系统、煤岩识别系统融合,建立了综合工作面煤岩识别系统,替代了传统采煤中依靠矿工眼看耳听具有很大误差的“经验式采煤”,提升了采煤机工作精度,为综采工作面采煤机截割提供测量的轨迹,解决了采煤机在工作时不能自适应调整滚筒截割高度的问题,把采煤机的控制由开环控制变成了闭环控制,提高了采煤机采煤的效率和可靠性。
附图说明
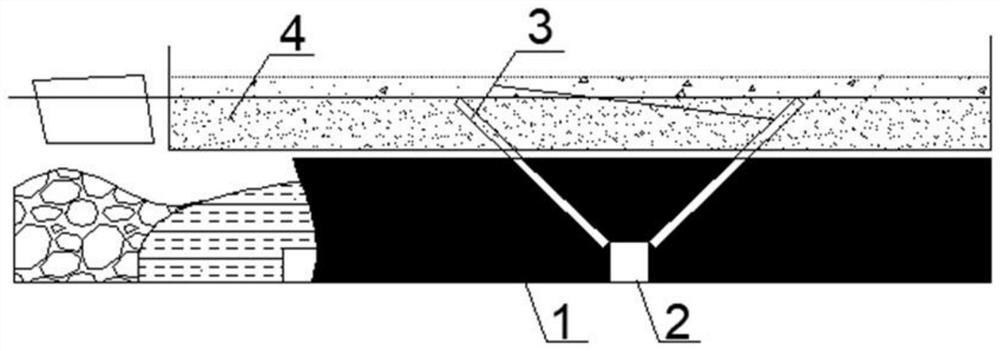
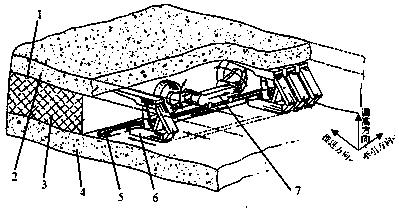
图1为综采工作面示意图;
图2为采煤机姿态数据获取结构示意图;
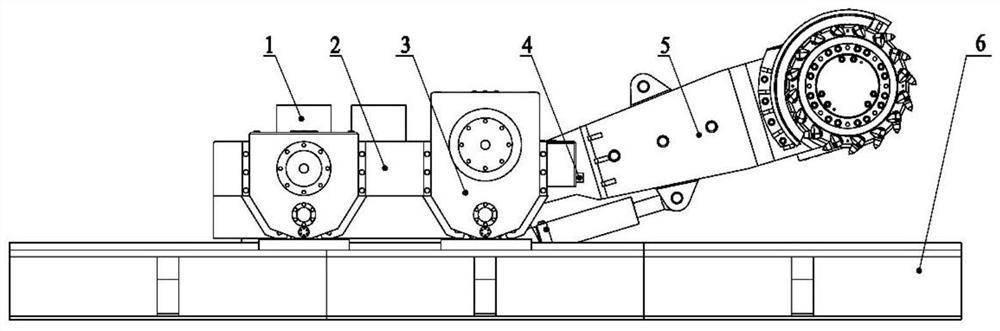
图3为采煤机速度数据获取结构示意图;
图4为煤岩识别系统输出示意图;
图5为防爆箱体结构示意图;
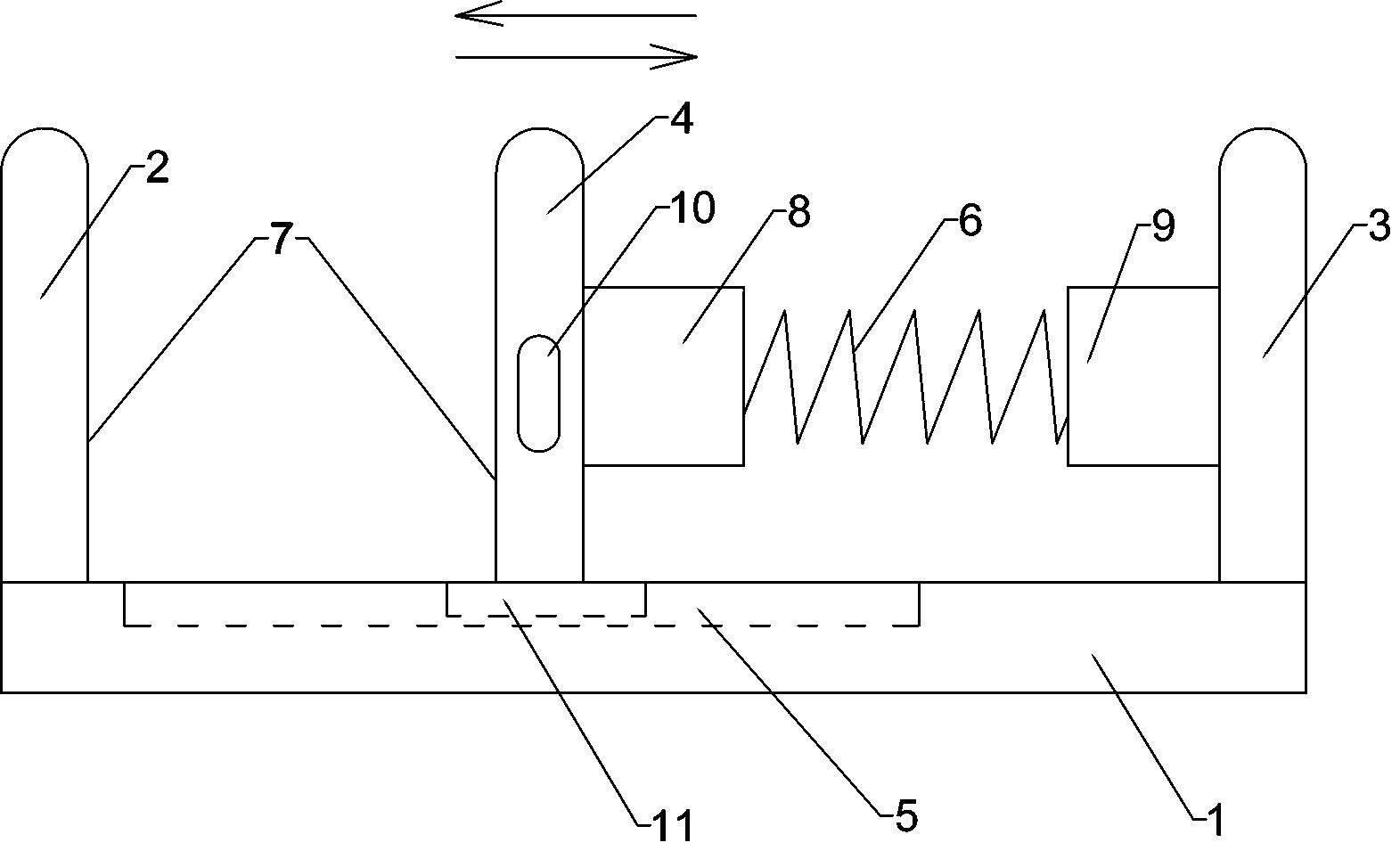
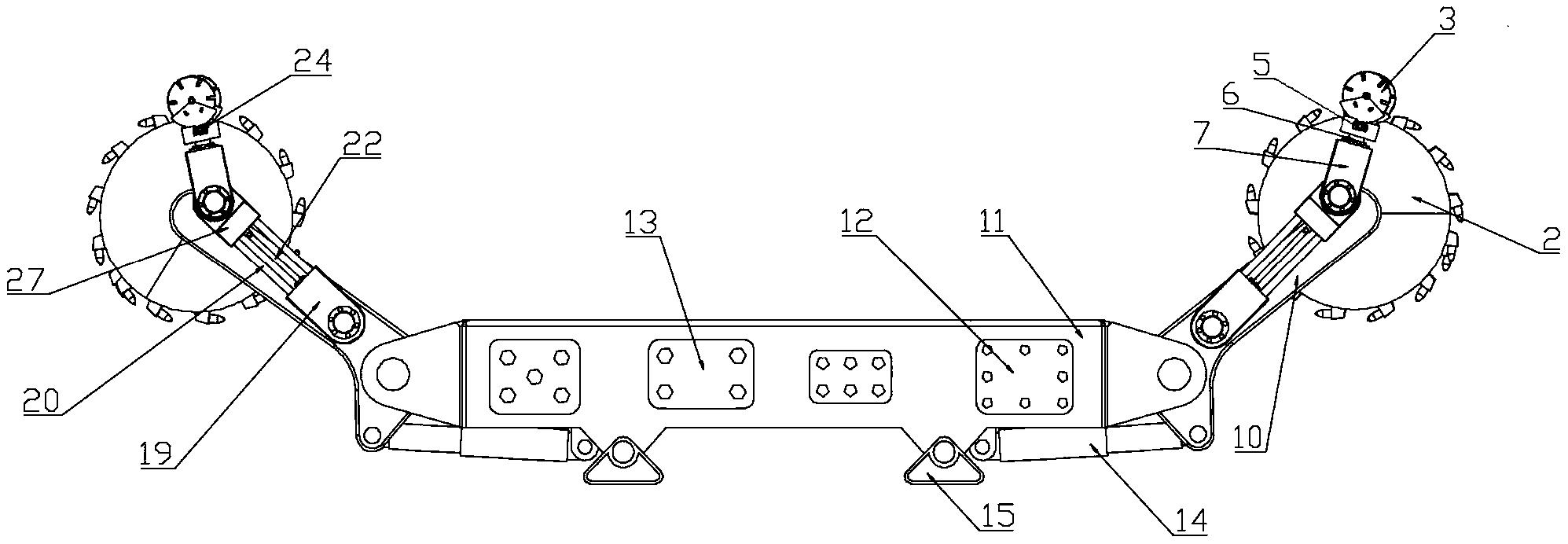
图6为舵机主视图;
图7为防爆箱体内部结构示意图;
图8为本实用新型综采工作面煤岩识别装置的识别方法逻辑框图;
其中:1、煤层岩层分界线;2、顶板;3、煤层;4、底板;5、刮板机;6、液压支架;7、采煤机;8、防爆箱体;9、惯性导航装置;10、轴编码器;11、扫描机构;12、隔爆型卤素灯座;13、防爆双头舵机;14、连接光纤的准直镜; 15、准直镜夹持装置;16、轴;17、近红外光谱仪;18、舵机控制板;19、嵌入式工控机;20、防爆电池。
具体实施方式
下面结合说明书附图以及具体实施例对本实用新型技术方案做进一步的解释:
如图1所示,刮板机5是采煤机7的运行轨道,采煤机7在刮板机5上往复运行截割煤层3,煤块掉落到刮板机5上运出工作面,采煤机7的滚筒在截割时根据煤岩分界线1来调整采高,刮板机5带着采煤机7向推进方向推移,形成采空区,同时刮板机5底部的油缸拉动液压支架6完成采空区的支护,往复运行,完成煤的开采。
如图2所示,惯性导航装置9、防爆箱体8安装在采煤机上,轴编码器10 安装于采煤机的行走部。
如图3所示,防爆双头舵机13、准直镜14、准直镜夹持装置15、隔爆型卤素灯座12、轴16构成了扫描装置11并安装在防爆箱体8上;
舵机控制板18、嵌入式工控机19、防爆电池20安装于防爆箱体8内部。
如图4所示,综采工作面煤岩识别软件、综采工作面采煤机定位软件均以嵌入式工控机19为数据处理平台,安装于嵌入式工控机19上。
本实用新型的一种结合采煤机定位系统的综采工作面煤岩界面识别方法,包括如下步骤:
以采煤机7的几何中心为坐标原点为采煤机坐标系OXbYbZb,采煤机7的牵引方向为Yb轴,采煤机的调高方向为Zb轴,采煤机推进方向为Xb轴;以采煤机7 的工作起点为坐标原点建立采取局部地理坐标系OXgYgZg,Xg方向由当地经线方向指向东,Yg方向由当地子午线方向指向北,Zg方向与重力加速度方向相反。
调整隔爆型卤素灯座12,使其发出的光斑与连接光纤的准直镜14的焦点重合,由防爆双头舵机带动扫描机构11在XbOZb平面做扫描角为θ的扫描运动,θ的大小由采煤机最大采高决定,当θ最大时,扫描机构11采样位置为采煤机最大采高处。
煤岩分界线的构建包括如下步骤:
(1)采煤机7运动时扫描机构面对煤壁做往复的扫描运动,舵机控制板18 实时的把机构扫描角度返回到嵌入式工控机19,近红外光谱仪17在扫描过程中实时的对煤壁进行光谱数据的采集。
(2)煤岩识别系统软件二值化煤岩,把煤标志设为“0”岩的标志设为“1”,接收光谱数据,同时通过煤岩识别的算法来实时的对所采集的数据进行煤岩识别,煤岩识别算法具体如下:
运用光谱角度匹配(SAM)的算法,计算所测目标光谱与标准光谱库的广义夹角,判定所测目标的类型,最终实现对煤岩的识别。
广义夹角为:
即:
式中,X为被测目标光谱向量、Y为标准光谱库向量,X、Y均不为零,
当识别结果标志点从“0”变为“1”或者从“1”变为“0”时,设此时刻为 j时刻,由嵌入式工控机19记录舵机控制板在j时刻所返回的扫描机构的扫描角度;煤岩识别系统软件通过采煤机距煤壁的距离L及扫描角度θj实时的解算该分界点在采煤机坐标系下的位置Sb1(0,0,ΔZ)T并返回该数据。
(3)采煤机定位系统实时接收惯性导航装置9和轴编码器10的数据来获取采煤机7的姿态与速度数据,通过航位推算算法实时解算采煤机在局部地理坐标系下的坐标,当煤岩识别软件返回煤岩分界点的扫描角度θj时,通过当前航位推算的算法解算煤岩分界点的坐标,拟合煤岩分界点为煤岩分界线1,具体方法如下:
1)嵌入式工控机18读取惯导所返回的采煤机航向角α、俯仰角β;
2)通过航位推算实时解算采煤机在局部地理坐标系下的坐标Sg(Xg,Yg,Zg) T行进轨迹,其满足如下的关系式:
式中i表示i时刻;X、Y、Z分别为采煤机7在局部地理坐标系下的Xg、Yg、 Zg;T是采样周期;vi是i时刻轴编码器10输出的速度值,αi和βi分别是i时刻惯导9的航向角和俯仰角;
3)当煤岩识别软件在j时刻检测到煤岩分界点时,返回舵机的扫描角度θj,在采煤机坐标系下,煤岩分界点坐标Sb1(Xb1,Yb1,Zb1)T和采煤机Sb(Xb,Yb,Zb)T满足以下关系式:
式中,L为准直镜镜头到煤壁的垂直距离,S为准直镜镜头到采煤机机身上的垂直距离。
4)采煤机定位软件根据煤岩分界点j时刻(i=j)的局部地理坐标系下的采煤机坐标Sg(Xg,Yg,Zg)T解算煤岩分界点在局部地理坐标系下的坐标Sg1(Xg1, Yg1,Zg1)T如式5所示,根据煤岩分界点的坐标拟合出煤岩分界线。
(4)重复(1)~(5),实现采煤机的运动轨迹的建立和煤岩分界线1的建立。
综采工作面煤岩识别装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0