










专利摘要
本发明提供了一种空间可重构桁架式抓捕机构及其抓捕方法,抓捕机构包括基座和两个可重构桁架式抓捕手指,每个可重构桁架式抓捕手指均包括对接插头桁架单元、对接接口桁架单元、若干模块化可扩展桁架单元和若干直线驱动装置,每个可重构桁架式抓捕手指的一个对接插头桁架单元、若干个模块化可扩展桁架单元和一个对接接口桁架单元均顺次连接,每个可重构桁架式抓捕手指的相邻两桁架单元之间连接一直线驱动装置。本发明可实现抓捕手指与基座之间对接或分离,两手指之间对接与分离,可以根据抓捕任务的不同需求选择两手指协同的方式进行抓捕或两手指对接形成加长手指的方式完成抓取;对接扩展、结构简单,质量轻,抓捕空间大,对抓捕物体适应性好。
权利要求
1.一种空间可重构桁架式抓捕机构的抓捕方法,其特征在于:空间可重构桁架式抓捕机构,包括基座和两个可重构桁架式抓捕手指,每个可重构桁架式抓捕手指均包括一个对接插头桁架单元、一个对接接口桁架单元、若干个模块化可扩展桁架单元和若干个直线驱动装置,且每个可重构桁架式抓捕手指的一个对接插头桁架单元、若干个模块化可扩展桁架单元和一个对接接口桁架单元均顺次连接,每个可重构桁架式抓捕手指的相邻两桁架单元之间连接一直线驱动装置;
所述的对接插头桁架单元、对接接口桁架单元和所有的模块化可扩展桁架单元均为四面体桁架结构,每个可重构桁架式抓捕手指的所述对接插头桁架单元与相邻的模块化可扩展桁架单元之间、相邻的两个模块化可扩展桁架单元之间以及所述对接接口桁架单元与相邻的模块化可扩展桁架单元之间分别共用一连接杆,所述连接杆为共用转动轴;
所述的对接接口桁架单元包括对接接口机构,所述的对接插头桁架单元包括对接插头,在基座的一侧设有一对接接口机构,另一侧设有一对接插头;
通过其中一个可重构桁架式抓捕手指的对接插头桁架单元上的对接插头与基座上的对接接口机构连接或分离实现其中一个可重构桁架式抓捕手指与基座的连接与分离;
通过另一个可重构桁架式抓捕手指的对接接口桁架单元上的对接接口机构与基座上的对接插头连接与分离实现另一个可重构桁架式抓捕手指与基座的连接与分离;
通过其中一个可重构桁架式抓捕手指的对接接口桁架单元上的对接接口机构与另一个可重构桁架式抓捕手指的对接插头桁架单元上的对接插头对接或分离实现两个可重构桁架式抓捕手指的连接与分离;
若干个直线驱动装置驱动两个可重构桁架式抓捕手指运动抓捕目标物;
所述对接接口机构包括压盖、弹簧、若干钢球、对接接口外环、钢球保持架和环形电磁铁;在钢球保持架的壁面上开设若干容纳钢球的圆柱通槽,所述弹簧置于钢球保持架和压盖之间;所述环形电磁铁固定在压盖的内表面;压盖通过螺钉与对接接口外环相连,压盖压紧所述弹簧、钢球保持架和若干钢球在对接接口外环内;所述对接插头上设有与若干钢球配合的环形凹槽;所述环形电磁铁为对接插头和对接接口机构之间的分离或连接提供驱动源;
未对接时,钢球保持架的外壁与对接接口外环的内壁贴合,对接时,对接插头的环形凹槽与钢球贴合,钢球与对接接口外环的内壁贴合;
方法具体包括以下步骤:
根据待抓捕目标物的尺寸与距离确定两个可重构桁架式抓捕手指协同抓取或两个可重构桁架式抓捕手指重构为一个加长手指后抓取;
若待抓捕目标物在两个可重构桁架式抓捕手指抓捕范围内,则通过若干个直线驱动装置控制两个可重构桁架式抓捕手指同时收拢实现抓取待抓捕目标物;
若待抓捕目标物在两个可重构桁架式抓捕手指抓捕范围外,则将两可重构桁架式抓捕手指重构为一个加长手指,重构两可重构桁架式抓捕手指的具体步骤如下:
两个可重构桁架式抓捕手指在若干个直线驱动装置的作用下运动至待对接位置;
控制其中一个可重构桁架式抓捕手指的对接接口桁架单元通过对接接口机构与另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头相连接,完成对接;
控制另一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构与基座的对接插头脱离;完成了两个可重构桁架式抓捕手指重构为一个加长的桁架式抓捕手指;重构后的一个加长的桁架式抓捕手指在若干直线驱动装置控制下实现抓取待抓捕目标物。
2.根据权利要求1所述的空间可重构桁架式抓捕机构的抓捕方法,其特征在于:所述对接接口桁架单元与相邻的模块化可扩展桁架单元之间的共用的连接杆为共用转动轴一,所述对接接口桁架单元还包括对接接口内部折线铰、对接接口对接折线铰、对接接口顶部接头、对接接口底部接头、对接接口对接安装板和五个对接接口连接杆;所述对接接口内部折线铰与对接接口对接折线铰通过共用转动轴一相连接,所述对接接口内部折线铰与对接接口对接折线铰绕共用转动轴一转动;所述对接接口顶部接头通过其中三个对接接口连接杆分别与对接接口底部接头、对接接口内部折线铰和对接接口对接折线铰相连接;所述对接接口底部接头通过另两个连接杆分别与对接接口内部折线铰和对接接口对接折线铰相连接;所述对接接口对接安装板通过螺钉与对接接口对接折线铰、对接接口顶部接头和对接接口底部接头相连接;所述对接接口机构通过螺钉与对接接口对接安装板相连接。
3.根据权利要求2所述的空间可重构桁架式抓捕机构的抓捕方法,其特征在于:所述对接插头桁架单元与相邻的模块化可扩展桁架单元之间的共用的连接杆为共用转动轴二,所述对接插头桁架单元还包括对接插头内部折线铰、对接插头对接折线铰、对接插头顶部接头、对接插头底部接头、对接插头安装板和五个对接插头连接杆;所述对接插头内部折线铰与对接插头对接折线铰之间通过共用转动轴二相连接,所述对接插头内部折线铰与对接插头对接折线铰绕共用转动轴二转动;所述对接插头顶部接头通过其中三个对接插头连接杆分别与对接插头底部接头、对接插头内部折线铰和对接插头对接折线铰相连接;所述对接插头底部接头通过另外两个对接插头连接杆分别与对接插头内部折线铰和对接插头折线铰相连接;所述对接插头安装板通过螺钉分别与对接插头对接折线铰、对接插头顶部接头和对接插头底部接头相连接;所述对接插头通过螺钉与对接插头安装板相连接。
4.根据权利要求3所述的空间可重构桁架式抓捕机构的抓捕方法,其特征在于:相邻的模块化可扩展桁架单元之间的共用的连接杆为共用转动轴三,每个所述模块化可扩展桁架单元还包括一个外部折线铰、两个内部折线铰、四个连接杆和一个顶部接头;所述外部折线铰通过两个共用转动轴三分别与两个内部折线铰相连接,所述外部折线铰和两个内部折线铰绕共用转动轴三进行转动;两个内部折线铰之间通过其中一个连接杆相连接;顶部接头通过三个连接杆分别与一个外部折线铰和两个内部折线铰相连接。
5.根据权利要求4所述的空间可重构桁架式抓捕机构的抓捕方法,其特征在于:每个所述直线驱动装置均包括直线电机和两个连接结构;直线电机通过连接结构与对应位置的相应桁架单元的顶部接头相连接。
6.根据权利要求1所述的空间可重构桁架式抓捕机构的抓捕方法,其特征在于:开有若干圆柱通槽的钢球保持架为圆台结构,且在圆台的侧面同一圆周处开设若干圆柱通槽,相应的,所述对接接口外环的内壁上设有与圆台的侧面配合的收缩结构。
7.根据权利要求1所述的空间可重构桁架式抓捕机构的抓捕方法,其特征在于:所述钢球设置六个,所述圆柱通槽也设置六个。
8.根据权利要求1-7中任一项所述的空间可重构桁架式抓捕机构的抓捕方法,其特征在于:其中一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构与另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头对接的具体步骤为:
直线驱动装置驱动另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头插入其中一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构的对接接口外环的孔中,并推动钢球保持架向插入方向移动,直到钢球与另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头上对应的环形凹槽相配合,完成对接;
另一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构与基座的对接插头脱离的具体步骤为:
对另一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构的环形电磁铁通电,环形电磁铁对钢球保持架施加电磁力使钢球保持架向压盖方向运动,钢球保持架拉动钢球与基座的对接插头的环形凹槽脱离,解除锁定,直线驱动装置驱动另一个可重构桁架式抓捕手指与基座分离。
说明书
技术领域
本发明属于空间机器人技术领域,尤其是涉及一种空间可重构桁架式抓捕机构及其抓捕方法。
背景技术
随着航天技术的发展,空间探索活动的频率逐年升高,越来越多的航天器在轨执行任务。然而由于自身故障,所携带燃料耗尽或发生撞击等原因会导致在轨运行的航天器失效,从而变为太空垃圾,威胁到其他航天器和宇航员的安全。采用在轨抓捕装置将失效的航天器捕获再利用,对延续航天器的使用寿命,降低成本和维护空间环境的安全具有重要的意义。因此,以长期的发展眼光来看,面向在轨服务的抓捕装置将成为我国未来太空探索中不可缺少的一项应用技术。
目前针对空间抓捕装置主要采用机械臂或机械臂与灵巧手相互配合的抓捕方式,日本,德国和加拿大设计的空间机械臂系统,都通过配合前端的灵巧手对目标物体进行抓捕。加拿大和NASA提出的MSS典型机械臂,由空间遥控操作臂和灵巧操作臂组成,宇航员通过控制机械臂完成抓捕;欧空局开发的SMART-OLEV在轨捕获装置,通过远程对接环与目标物体完成对接实现在轨捕获。但受制于具体抓捕任务和抓捕环境,现有的机械臂较为笨重,灵巧手负重又比较轻,导致装置抓捕范围较小,对抓捕目标物的适应性差,抓捕性能不佳。
发明内容
有鉴于此,本发明旨在提出一种空间可重构桁架式抓捕机构及其抓捕方法,解决现有的空间抓捕装置结构复杂,质量重,抓捕空间小,对抓捕物体适应性差和无法对接扩展的问题。
为达到上述目的,本发明的技术方案是这样实现的:
一种空间可重构桁架式抓捕机构,包括基座和两个可重构桁架式抓捕手指,每个可重构桁架式抓捕手指均包括一个对接插头桁架单元、一个对接接口桁架单元、若干个模块化可扩展桁架单元和若干个直线驱动装置,且每个可重构桁架式抓捕手指的一个对接插头桁架单元、若干个模块化可扩展桁架单元和一个对接接口桁架单元均顺次连接,每个可重构桁架式抓捕手指的相邻两桁架单元之间连接一直线驱动装置;
所述的对接插头桁架单元、对接接口桁架单元和所有的模块化可扩展桁架单元均为四面体桁架结构,每个可重构桁架式抓捕手指的所述对接插头桁架单元与相邻的模块化可扩展桁架单元之间、相邻的两个模块化可扩展桁架单元之间以及所述对接接口桁架单元与相邻的模块化可扩展桁架单元之间分别共用一连接杆,所述连接杆为共用转动轴;
所述的对接接口桁架单元包括对接接口机构,所述的对接插头桁架单元包括对接插头,在基座的相对两侧也分别设有一对接接口机构和一对接插头,
通过其中一个可重构桁架式抓捕手指的对接插头桁架单元上的对接插头与基座上的对接接口机构连接或分离实现其中一个可重构桁架式抓捕手指与基座的连接与分离;
通过另一个可重构桁架式抓捕手指的对接接口桁架单元上的对接接口机构与基座上的对接插头连接与分离实现另一个可重构桁架式抓捕手指与基座的连接与分离;
通过其中一个可重构桁架式抓捕手指的对接接口桁架单元上的对接接口机构与另一个可重构桁架式抓捕手指的对接插头桁架单元上的对接插头对接或分离实现两个可重构桁架式抓捕手指的连接与分离;
若干个直线驱动装置驱动两个可重构桁架式抓捕手指运动抓捕目标物。
进一步的,所述对接接口机构包括压盖、弹簧、若干钢球、对接接口外环、钢球保持架和环形电磁铁;在钢球保持架的壁面上开设若干容纳钢球的圆柱通槽,所述弹簧置于钢球保持架和压盖之间;所述环形电磁铁固定在压盖的内表面;压盖通过螺钉与对接接口外环相连,压盖压紧所述弹簧、钢球保持架和若干钢球在对接接口外环内;所述对接插头上设有与若干钢球配合的环形凹槽;所述环形电磁铁为对接插头和对接接口机构之间的分离或连接提供驱动源;
未对接时,钢球保持架的外壁与对接接口外环的内壁贴合,对接时,对接插头的环形凹槽与钢球贴合,钢球与对接接口外环的内壁贴合。
进一步的,所述对接接口桁架单元与相邻的模块化可扩展桁架单元之间的共用的连接杆为共用转动轴一,所述对接接口桁架单元还包括对接接口内部折线铰、对接接口对接折线铰、对接接口顶部接头、对接接口底部接头、对接接口对接安装板和五个对接接口连接杆;所述对接接口内部折线铰与对接接口对接折线铰通过共用转动轴一相连接,所述对接接口内部折线铰与对接接口对接折线铰绕共用转动轴一转动;所述对接接口顶部接头通过其中三个对接接口连接杆分别与对接接口底部接头、对接接口内部折线铰和对接接口对接折线铰相连接;所述对接接口底部接头通过另两个连接杆分别与对接接口内部折线铰和对接接口对接折线铰相连接;所述对接接口对接安装板通过螺钉与对接接口对接折线铰、对接接口顶部接头和对接接口底部接头相连接;所述对接接口机构通过螺钉与对接接口对接安装板相连接。
进一步的,所述对接插头桁架单元与相邻的模块化可扩展桁架单元之间的共用的连接杆为共用转动轴二,所述对接插头桁架单元还包括对接插头内部折线铰、对接插头对接折线铰、对接插头顶部接头、对接插头底部接头、对接插头安装板和五个对接插头连接杆;所述对接插头内部折线铰与对接插头对接折线铰之间通过共用转动轴二相连接,所述对接插头内部折线铰与对接插头对接折线铰绕共用转动轴二转动;所述对接插头顶部接头通过其中三个对接插头连接杆分别与对接插头底部接头、对接插头内部折线铰和对接插头对接折线铰相连接;所述对接插头底部接头通过另外两个对接插头连接杆分别与对接插头内部折线铰和对接插头折线铰相连接;所述对接插头安装板通过螺钉分别与对接插头对接折线铰、对接插头顶部接头和对接插头底部接头相连接;所述对接插头通过螺钉与对接插头安装板相连接。
进一步,相邻的模块化可扩展桁架单元之间的共用的连接杆为共用转动轴三,每个所述模块化可扩展桁架单元还包括一个外部折线铰、两个内部折线铰、四个连接杆和一个顶部接头;所述外部折线铰通过两个共用转动轴三分别与两个内部折线铰相连接,所述外部折线铰和两个内部折线铰绕共用转动轴三进行转动;两个内部折线铰之间通过其中一个连接杆相连接;顶部接头通过三个连接杆分别与一个外部折线铰和两个内部折线铰相连接。
进一步的,每个所述直线驱动装置均包括直线电机和两个连接结构;直线电机通过连接结构与对应位置的相应桁架单元的顶部接头相连接。
进一步的,开有若干圆柱通槽的钢球保持架为圆台结构,且在圆台的侧面同一圆周处开设若干圆柱通槽,相应的,所述对接接口外环的内壁上设有与圆台的侧面配合的收缩结构。
进一步的,所述钢球设置六个,所述圆柱通槽也设置六个。
一种空间可重构桁架式抓捕机构的抓捕方法,具体包括以下步骤:
根据待抓捕目标物的尺寸与距离确定两个可重构桁架式抓捕手指协同抓取或两个可重构桁架式抓捕手指重构后抓取;
若待抓捕目标物在两个可重构桁架式抓捕手指抓捕范围内,则通过若干个直线驱动装置控制两个可重构桁架式抓捕手指同时收拢实现抓取待抓捕目标;
若待抓捕目标物在两个可重构桁架式抓捕手指抓捕范围外,则将两可重构桁架式抓捕手指重构为一个加长手指,重构两可重构桁架式抓捕手指的具体步骤如下:
两个可重构桁架式抓捕手指在若干个直线驱动装置的作用下运动至待对接位置;
控制其中一个可重构桁架式抓捕手指的对接接口桁架单元通过对接接口机构与另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头相连接,完成对接;
控制另一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构与基座的对接插头脱离;完成了两个可重构桁架式抓捕手指重构为一个加长的桁架式抓捕手指;重构后的一个加长的桁架式抓捕手指在若干直线驱动装置控制下实现抓取待抓捕目标物。
进一步的,其中一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构与另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头对接的具体步骤为:
直线驱动装置驱动另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头插入其中一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构的对接接口外环的孔中,并推动钢球保持架向插入方向移动,直到钢球与另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头上对应的环形凹槽相配合,完成对接;
另一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构与基座的对接插头脱离的具体步骤为:
对另一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构的环形电磁铁通电,环形电磁铁对钢球保持架施加电磁力使钢球保持架向压盖方向运动,钢球保持架拉动钢球与基座的对接插头的环形凹槽脱离,解除锁定,直线驱动装置驱动另一个可重构桁架式抓捕手指与基座分离。
相对于现有技术,本发明所述的空间可重构桁架式抓捕机构具有以下优势:
1.本发明的空间可重构桁架式抓捕机构具有对接机构,可实现抓捕手指与基座之间对接或分离,两手指之间对接与分离,从而可以根据抓捕任务的不同需求选择两手指协同的方式进行抓捕或两手指对接形成加长手指的方式完成抓取。
2.本发明的对接机构采用电磁方式控制连接与分离,自动化程度和可靠性高
3.本发明的模块化可扩展桁架单元结构相同,可以扩展,从而改变每根手指的长度以适应不同应用场合的要求。
4.本发明的四面体桁架单元相邻转轴之间呈一定夹角布置,从而若干个单元转动后会产生螺旋效果,可用来抓取空间中不同位置和形状的目标。
5.本发明采用桁架结构,结构简单,质量轻,抓取力大。
6.本发明采用多个直线驱动装置,可以精确控制机械手指的位置和抓取力,从而适应不同抓捕任务的需求。
7.本发明所有结构都是航天常用材料加工制造,材料资源丰富,加工工艺成熟,便于所属机构的技术实施。
8.本发明也满足其他抓取任务的基本要求,便于展开技术推广。
附图说明
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
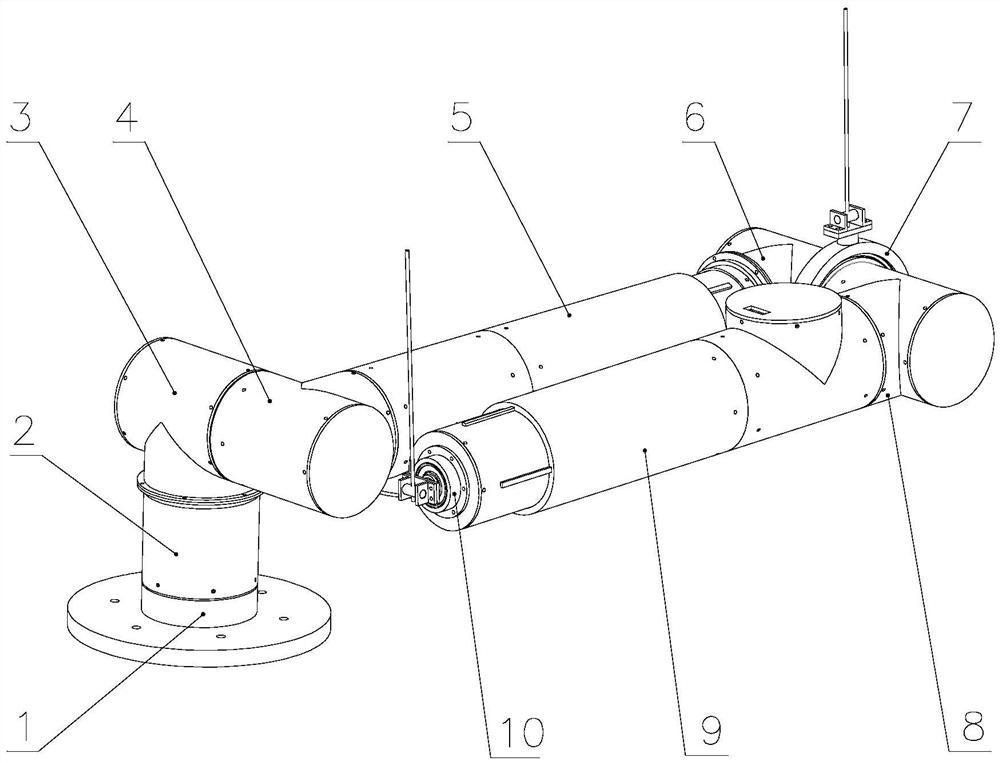
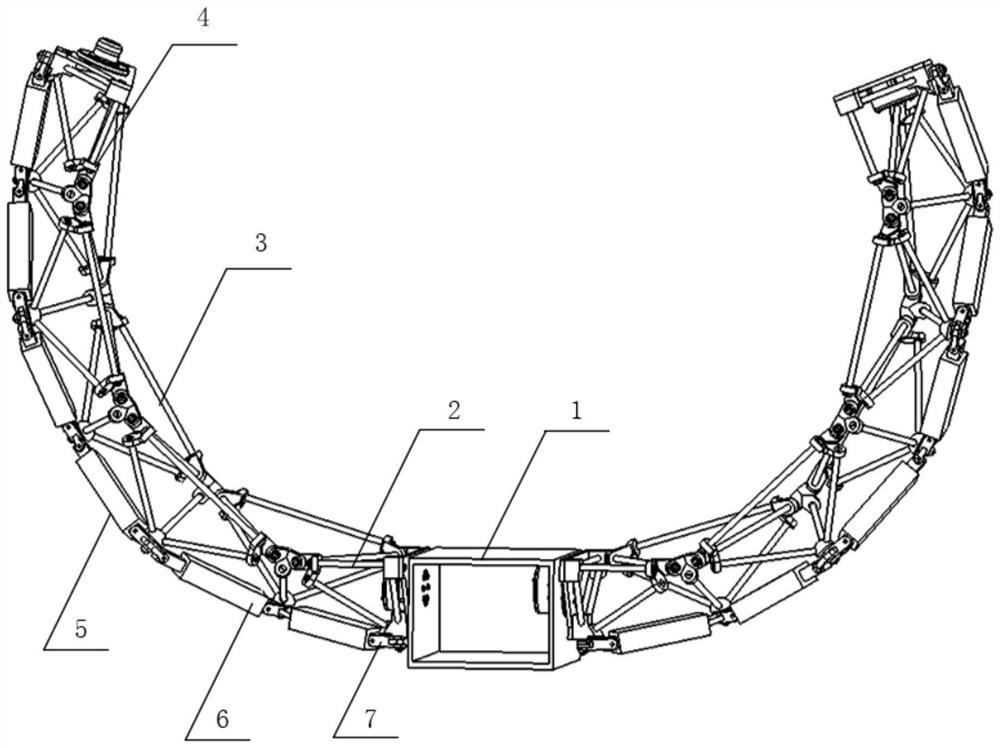
图1为本发明实施例所述的空间可重构桁架式抓捕机构的结构示意图;
图2是本发明对接接口桁架单元的示意图;
图3是本发明对接插头桁架单元的示意图;
图4是本发明模块化可扩展桁架单元的示意图;
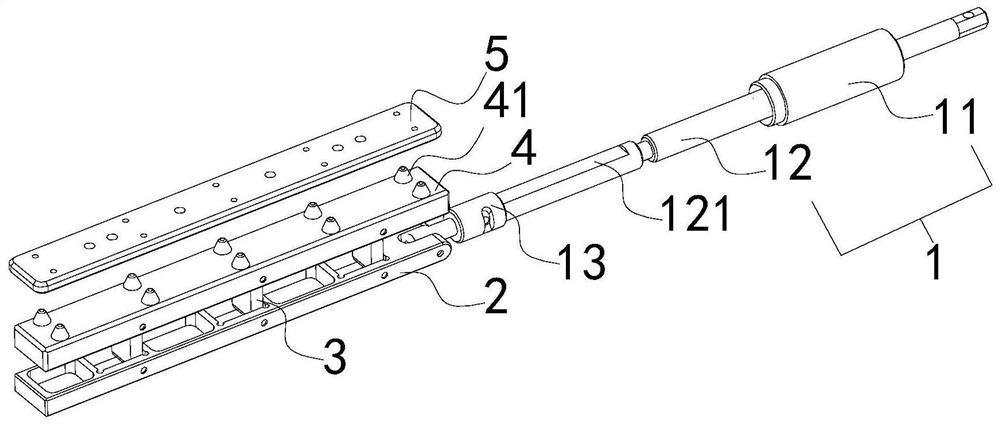
图5是本发明对接接口机构的爆炸视图;
图6是本发明对接接头对接时的剖面视图;
图7是本发明两手指协同抓取长方体示意图;
图8是本发明两手指对接状态示意图;
图9是本发明两手指对接后与基座脱离示意图;
图10是本发明两手指对接后环抱抓取圆柱体示意图;
图11是本发明两手指对接后螺旋抓取圆柱体示意图。
附图标记说明:
1-基座,2-对接接口桁架单元,3-模块化可扩展桁架单元,4-对接插头桁架单元,5-直线驱动装置,6-直线电机,7-连接结构,8-对接接口对接折线铰,9-共用转动轴一,10-对接接口内部折线铰,11-对接接口机构,11-1-压盖,11-2-弹簧,11-3-钢球,11-4-对接接口外环,11-5-钢球保持架,11-6-环形电磁铁,11-7-圆柱通槽,12-对接接口顶部接头,13-对接插头,13-1-环形凹槽,14-对接接口连接杆,15-对接接口底部接头,16-对接接口对接安装板,17-共用转动轴二,18-对接插头内部折线铰,19-对接插头对接折线铰,20-对接插头顶部接头,21-对接插头底部接头,22-对接插头安装板,23-1-对接插头连接杆一,23-2-对接插头连接杆二,23-3-对接插头连接杆三,23-4-对接插头连接杆四,23-5-对接插头连接杆五,24-共用转动轴三,25-外部折线铰,26-内部折线铰,27-1连接杆一,27-2-连接杆二,27-3-连接杆三,27-4-连接杆,28-顶部接头。
具体实施方式
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
下面将参考附图并结合实施例来详细说明本发明。
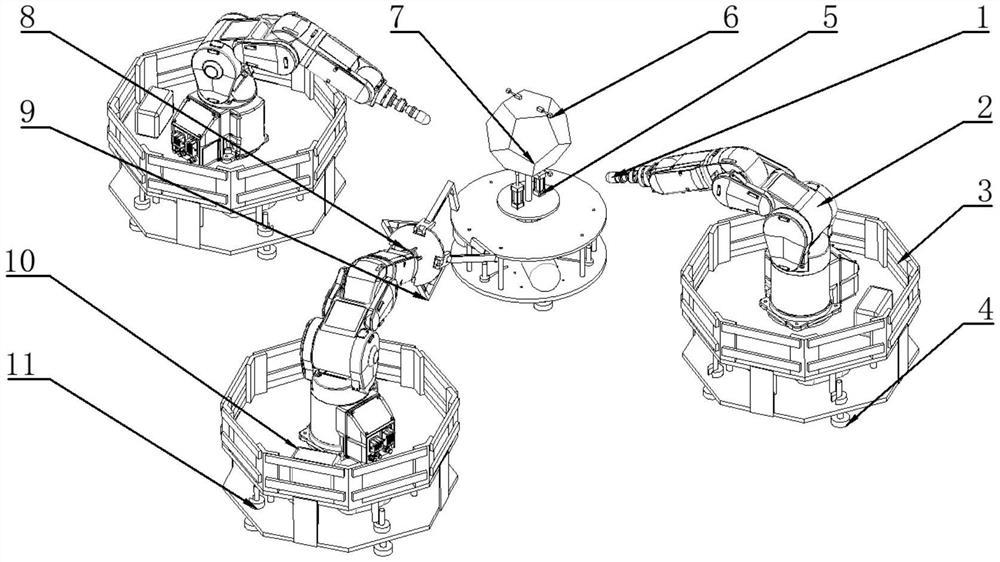
如图1-图9所示,一种空间可重构桁架式抓捕机构,包括基座1和两个可重构桁架式抓捕手指,每个可重构桁架式抓捕手指均包括一个对接插头桁架单元4、一个对接接口桁架单元2、若干个模块化可扩展桁架单元3和若干个直线驱动装置5,且每个可重构桁架式抓捕手指的一个对接插头桁架单元4、若干个模块化可扩展桁架单元5和一个对接接口桁架单元2均顺次连接,每个可重构桁架式抓捕手指的相邻两桁架单元之间连接一直线驱动装置5;
所述的对接插头桁架单元4、对接接口桁架单元2和所有的模块化可扩展桁架单元3均为四面体桁架结构,每个可重构桁架式抓捕手指的所述对接插头桁架单元4与相邻的模块化可扩展桁架单元3之间、相邻的两个模块化可扩展桁架单元3之间以及所述对接接口桁架单元2与相邻的模块化可扩展桁架单元3之间分别共用一连接杆,所述连接杆为共用转动轴;
所述的对接接口桁架单元2包括对接接口机构11,所述的对接插头桁架单元4包括对接插头13,在基座1的相对两侧也分别设有一对接接口机构11和一对接插头13,
通过其中一个可重构桁架式抓捕手指的对接插头桁架单元上的对接插头13与基座1上的对接接口机构11连接或分离实现其中一个可重构桁架式抓捕手指与基座1的连接与分离;
通过另一个可重构桁架式抓捕手指的对接接口桁架单元上的对接接口机构11与基座1上的对接插头13的对接或分离实现另一个可重构桁架式抓捕手指与基座1的连接或分离;
通过其中一个可重构桁架式抓捕手指的对接接口桁架单元2上的对接接口机构11与另一个可重构桁架式抓捕手指的对接插头桁架单元4上的对接插头13对接或分离实现两个可重构桁架式抓捕手指的重构与分离;
若干个直线驱动装置5驱动两个可重构桁架式抓捕手指运动抓捕目标物。
对接接口机构11包括压盖11-1、弹簧11-2、若干钢球11-3、对接接口外环11-4、钢球保持架11-5和环形电磁铁11-6;在钢球保持架11-5的壁面上开设若干容纳钢球11-3的圆柱通槽11-7,所述弹簧11-2置于钢球保持架11-5和压盖11-1之间;所述环形电磁铁11-6固定在压盖11-1的内表面;压盖11-1通过螺钉与对接接口外环11-4相连,压盖11-1压紧所述弹簧11-2、钢球保持架11-5和若干钢球11-3在对接接口外环11-4内;所述对接插头13上设有与若干钢球11-3配合的环形凹槽13-1;所述环形电磁铁11-6为对接插头13和对接接口机构11之间的分离或连接提供驱动源;
未对接时,钢球保持架11-5的外壁与对接接口外环11-4的内壁贴合,对接时,对接插头13的环形凹槽13-1与钢球11-3贴合,钢球11-3与对接接口外环11-4的内壁贴合。
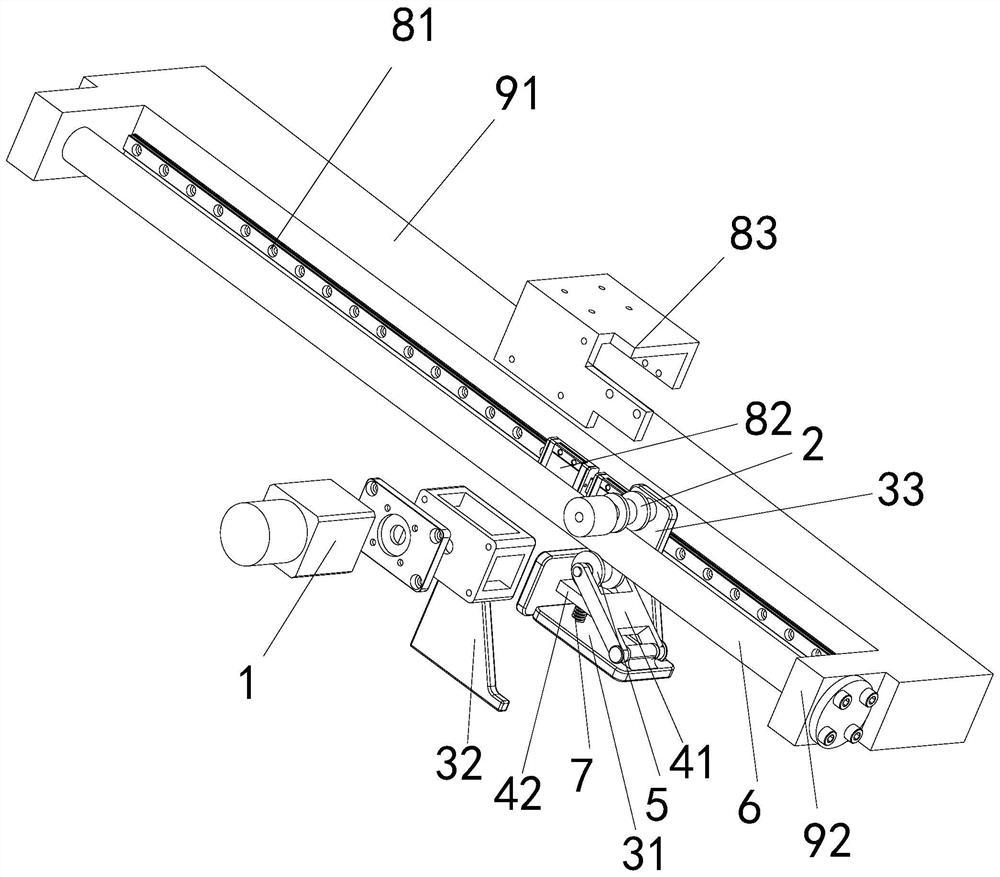
对接接口桁架单元2与相邻的模块化可扩展桁架单元3之间的共用的连接杆为共用转动轴一9,所述对接接口桁架单元2还包括对接接口内部折线铰10、对接接口对接折线铰8、对接接口顶部接头12、对接接口底部接头15、对接接口对接安装板16和五个对接接口连接杆14,分别为对接接口连接杆一、对接接口连接杆二、对接接口连接杆三、对接接口连接杆四和对接接口连接杆五;所述对接接口内部折线铰10与对接接口对接折线铰8通过共用转动轴一9相连接,对接接口内部折线铰10与对接接口对接折线铰8绕共用转动轴一9转动;所述对接接口顶部接头12通过其中三个对接接口连接杆分别与对接接口底部接头15、对接接口内部折线铰10和对接接口对接折线铰8相连接;所述对接接口底部接头15通过另两个连接杆分别与对接接口内部折线铰10和对接接口对接折线铰8相连接;所述对接接口对接安装板16通过螺钉与对接接口对接折线铰8、对接接口顶部接头12和对接接口底部接头15相连接;所述对接接口机构11通过螺钉与对接接口对接安装板16相连接,对接接口对接折线铰8、对接接口顶部接头12和对接接口底部接头15布置在对接接口对接安装板16的边角处,对接接口机构11安装在对接接口对接安装板16的中心处。
对接插头桁架单元4与相邻的模块化可扩展桁架单元3之间的共用的连接杆为共用转动轴二17,所述对接插头桁架单元3还包括对接插头内部折线铰18、对接插头对接折线铰19、对接插头顶部接头20、对接插头底部接头21、对接插头安装板22和五个对接插头连接杆,分别为对接插头连接杆一23-1、对接插头连接杆二23-2、对接插头连接杆三23-3、对接插头连接杆四23-4和对接插头连接杆五23-5;所述对接插头内部折线铰18与对接插头对接折线铰19之间通过共用转动轴二17相连接,所述对接插头内部折线铰18与对接插头对接折线铰19绕共用转动轴二17转动;所述对接插头顶部接头20通过其中三个对接插头连接杆分别与对接插头底部接头21、对接插头内部折线铰18和对接插头对接折线铰19相连接;所述对接插头底部接头21通过另外两个对接插头连接杆分别与对接插头内部折线铰18和对接插头折线铰19相连接;所述对接插头安装板22通过螺钉分别与对接插头对接折线铰19、对接插头顶部接头20和对接插头底部接头21相连接;所述对接插头13通过螺钉与对接插头安装板22相连接;对接插头对接折线铰19、对接插头顶部接头20和对接插头底部接头21布置在对接插头安装板22的边角处,对接插头13安装在对接插头安装板22的中心处。
相邻的模块化可扩展桁架单元3之间的共用的连接杆为共用转动轴三24,每个所述模块化可扩展桁架单元3还包括一个外部折线铰25、两个内部折线铰26、四个连接杆和一个顶部接头28,四个连接杆分别为连接杆一27-1、连接杆二27-2、连接杆三27-3和连接杆27-4;所述外部折线铰25通过两个共用转动轴三分别与两个内部折线铰26相连接,外部折线铰25与两个内部折线铰26绕共用转动轴三进行转动;两个内部折线铰26之间通过连接杆二27-2相连接;顶部接头28通过连接杆一27-1、连接杆二27-2和连接杆27-4分别与一个外部折线铰25和两个内部折线铰26相连接。模块化可扩展桁架单元3的数量不限,可以根据任务不同串联为任意长度,以适应不同抓捕目标的需求。
每个所述直线驱动装置5均包括直线电机6和两个连接结构7;直线电机6通过连接结构7与对应位置的相应桁架单元的顶部接头相连接,连接结构7可以是铰接件。
开有若干圆柱通槽11-7的钢球保持架11-5为圆台结构,且在圆台的侧面同一圆周处开设若干圆柱通槽11-7,相应的,所述对接接口外环11-4的内壁上设有与圆台的侧面配合的收缩结构。
所述钢球11-3设置六个,所述圆柱通槽11-3也设置六个。
一种空间可重构桁架式抓捕机构的抓捕方法,具体包括以下步骤:
根据待抓捕目标物的尺寸与距离确定两个可重构桁架式抓捕手指协同抓取或两个可重构桁架式抓捕手指重构为一个加长手指后抓取;
若待抓捕目标物在两个可重构桁架式抓捕手指抓捕范围内,则通过若干个直线驱动装置控制两个可重构桁架式抓捕手指同时收拢实现抓取待抓捕目标物;
若待抓捕目标物在两个可重构桁架式抓捕手指抓捕范围外,则将两可重构桁架式抓捕手指重构为一个加长手指,重构两可重构桁架式抓捕手指的具体步骤如下:
两个可重构桁架式抓捕手指在若干个直线驱动装置的作用下运动至待对接位置;
控制其中一个可重构桁架式抓捕手指的对接接口桁架单元通过对接接口机构与另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头相连接,完成对接;
控制另一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构与基座的对接插头脱离;完成了两个可重构桁架式抓捕手指重构为一个加长的桁架式抓捕手指;重构后的一个加长的桁架式抓捕手指在若干直线驱动装置控制下实现抓取待抓捕目标物。
空间可重构桁架式抓捕机构的抓捕方法,其中一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构与另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头对接的具体步骤为:
直线驱动装置驱动另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头插入其中一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构的对接接口外环的孔中,并推动钢球保持架向插入方向移动,直到钢球与另一个可重构桁架式抓捕手指的对接插头桁架单元的对接插头上对应的环形凹槽相配合,完成对接;
另一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构与基座的对接插头脱离的具体步骤为:
对另一个可重构桁架式抓捕手指的对接接口桁架单元的对接接口机构的环形电磁铁通电,环形电磁铁对钢球保持架施加电磁力使钢球保持架向压盖方向运动,钢球保持架拉动钢球与基座的对接插头的环形凹槽脱离,解除锁定,直线驱动装置驱动另一个可重构桁架式抓捕手指与基座分离。
以上给出的是两个可重构桁架式抓捕手指重构时,另一个可重构桁架式抓捕手指与基座分离实现重构为一个加长手指,也可以是其中一个可重构桁架式抓捕手指与基座分离实现重构成一个加长手指,方法步骤相类似,在此不再赘述。
本申请的两个可重构桁架式抓捕手指可以根据任务需要在空间内多个位置完成对接,两个可重构桁架式抓捕手指分别通过对接插头桁架单元4和对接接口桁架单元2与基座1相连,两个可重构桁架式抓捕手指协同抓捕目标物。具体实施方式如图7所示,图7为两手指协同抓捕长方体的示意图,在具体实施时,抓捕物体根据抓捕任务的具体需要决定,图7只是起到协同抓捕功能的示意作用。
两个可重构桁架式抓捕手指通过对接机构对接组成一根加长手指后,增大了抓捕装置的抓捕空间。图10显示了两根可重构桁架式抓捕手指对接组成加长手指后对空间内圆柱体进行环抱抓取的示意图。需要说明的是,环抱抓取的抓捕面为基座和手指所在平面;图11显示了两根可重构桁架式抓捕手指对接组成加长手指后对空间内圆柱体进行螺旋抓取的示意图。需要说明的是,螺旋抓取的抓捕面则不再限于单一的平面,可以对空间内较长物体进行抓捕。
本申请不仅可以如图10、图11对空间内圆柱体进行抓捕,同时也可以根据需要对空间内不同形状和大小的目标进行抓捕。
本申请中的直线驱动装置5控制手指的运动,属于本领域的现有控制方法,本申请不再赘述。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
空间可重构桁架式抓捕机构及其抓捕方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0