








专利摘要
本发明公开了一种用于四旋翼无人机的绳牵式控制装置和控制方法。固定外壳顶面的四角固定有固定支架,固定支架通过支架脚连接安装在四旋翼无人机的机架底面,水平移动控制器安装在固定外壳内的底部,并通过连接器与下方升降控制器的上端连接,升降控制器的下端经牵引绳与收线器连接进行,收线器连接到牵引环;将牵引环握在手中,通过牵引环的运动控制四旋翼无人机的升降和水平移动。本发明可大大地改善了四旋翼无人机以往那种复杂繁琐的控制方式,极大限度地避免了由于操作不当而引发的安全事故,一定程度上替代了四旋翼无人机的配套遥控器,并推动了四旋翼无人机走近大众生活的脚步。
权利要求
1.一种用于四旋翼无人机的绳牵式控制装置,其特征在于:包括牵引环(1)、收线器(2)、牵引绳(3)、升降控制器(4)、连接器(5)、水平移动控制器(6)、固定外壳(7)、固定支架(8)和支架脚(9);固定外壳(7)顶面的四角固定有固定支架(8),固定支架(8)通过支架脚(9)连接安装在四旋翼无人机的机架底面,水平移动控制器(6)安装在固定外壳(7)内的底部,并通过连接器(5)与下方升降控制器(4)的上端连接,升降控制器(4)的下端经牵引绳(3)与收线器(2)连接进行,收线器(2)连接到尾端作为人手持控制的牵引环(1)。
2.根据权利要求1所述的一种用于四旋翼无人机的绳牵式控制装置,其特征在于:所述的牵引绳(3)采用尼龙绳。
3.根据权利要求1所述的一种用于四旋翼无人机的绳牵式控制装置,其特征在于:所述的升降控制器(4)包括壳体和安装在壳体内的升降数据处理芯片(4.2)、红外测距传感器(4.3)、支柱(4.4)、钢丝细线(4.6)、挡板(4.5)和弹簧(4.7);壳体顶端安装有用于与连接器(5)连接的螺纹头(4.1),壳体内顶部安装有升降数据处理芯片(4.2)和红外测距传感器(4.3),壳体内中心设有支柱(4.4),支柱(4.4)上活动套有挡板(4.5),红外测距传感器(4.3)的探头朝向正下方的挡板(4.5);弹簧(4.7)套在挡板(4.5)与壳体内底面之间的支柱(4.4)上,挡板(4.5)中心连接钢丝细线(4.6)的一端,钢丝细线(4.6)的另一端向下贯穿过支柱(4.4)中空管道连接挂钩(4.8),挂钩(4.8)悬挂于壳体外部连接所述牵引绳(3)。
4.根据权利要求1所述的一种用于四旋翼无人机的绳牵式控制装置,其特征在于:所述的水平移动控制器(6)包括摇杆电位器(6.1)、保护电阻(6.2)、水平移动数据处理芯片(6.3)和固定底板(6.4),固定底板(6.4)固定安装在固定外壳(7),固定底板(6.4)内安装有水平移动数据处理芯片(6.3),摇杆电位器(6.1)和保护电阻(6.2)固定安装在固定底板(6.4)底端,摇杆电位器(6.1)的摇杆端连接到所述连接器(5)。
5.根据权利要求1所述的一种用于四旋翼无人机的绳牵式控制装置,其特征在于:所述的连接器(5)的两端均为螺纹凹孔,下端与所述升降控制器(4)上端的螺纹头(4.1)固定连接,上端与所述水平移动控制器(6)中摇杆电位器(6.1)的螺纹摇杆固定连接。
6.一种用于四旋翼无人机的绳牵式控制方法,其特征在于包括以下步骤:四旋翼无人机的机架下部安装有如权利要求1~7所述的绳牵式控制装置,起飞四旋翼无人机后,操控者将牵引环(1)握在手中,通过牵引环(1)的运动控制四旋翼无人机的升降和水平移动:通过上下拉动牵引绳(3)分别控制四旋翼无人机的升降,通过牵引绳(3)水平方向拉动控制四旋翼无人机对应相同方向的水平移动。
7.根据权利要求6所述的一种用于四旋翼无人机的绳牵式控制方法,其特征在于:通过上下拉动牵引绳(3),牵引绳(3)带动升降控制器(4)中的弹簧(4.7)压缩变化,红外测距传感器(4.3)测距挡板(4.5)的位移差,无人机中的飞行控制器接收位移差数据进行升降控制。
8.根据权利要求7所述的一种用于四旋翼无人机的绳牵式控制方法,其特征在于:在保持无人机悬停时,所述弹簧(4.7)位于压缩中位,其位于总压缩量的一半处。
9.根据权利要求6所述的一种用于四旋翼无人机的绳牵式控制方法,其特征在于:通过水平方向拉动牵引绳(3),带动摇杆电位器(6.1)上的摇杆摆动,使摇杆电位器(6.1)产生相应的电信号变化,无人机中的飞行控制器接收电信号变化数据控制水平移动。
10.根据权利要求9所述的一种用于四旋翼无人机的绳牵式控制方法,其特征在于:在保持无人机悬停时,所述摇杆电位器(6.1)的中位位于其摇杆摆动的中心。
说明书
技术领域
本发明涉及一种用于四旋翼无人机的控制领域,特别是涉及到了一种用于四旋翼无人机的绳牵式控制装置和控制方法。
背景技术
四旋翼飞行器是最近几年来比较热门的新科技产品,它具有机械结构简单、稳定性好、操作灵活、机动性能强等特点,可以在小范围内实现起落和悬停,代替人们进行一些困难环境下的工作。由于这些特点,四旋翼无人机被广泛应用在航拍、侦查、监控、电力故障查询、搜救、喷洒农药等各个领域。
传统的四旋翼无人机的控制装置大都是一个很多按钮和摇杆的遥控器,不仅操作起来麻烦,而且用摇杆来控制油门使得很多刚入手的人不知轻重,稍有不慎无人机便会控制失当,很多人在玩无人机的时候都摔过,轻的砸坏无人机,重则掉下来砸到人或是被旋翼刮伤,这使得很大一部分人都不敢玩四旋翼无人机。由此可见通过遥控器来控制四旋翼无人机需要一定的飞行技巧,类似与学驾驶,没有一定的经验和能力控制不好油门的轻重,往往会出现意外。
发明内容
为了解决背景技术中存在的问题,本发明的目的在于提供了一种用于四旋翼无人机的绳牵式控制装置和控制方法。
本发明采用的技术方案是:
一、一种用于四旋翼无人机的绳牵式控制装置:
本发明绳牵式控制装置包括牵引环、收线器、牵引绳、升降控制器、连接器、水平移动控制器、固定外壳、固定支架和支架脚;固定外壳顶面的四角固定有固定支架,固定支架通过支架脚连接安装在四旋翼无人机的机架底面,水平移动控制器安装在固定外壳内的底部,并通过连接器与下方升降控制器的上端连接,升降控制器的下端经牵引绳与用于收放牵引绳的收线器连接进行,收线器连接到尾端作为人手持控制的牵引环。
所述的牵引绳采用刚性良好的尼龙绳,其总长为10米、直径为2毫米,通过收线器进行收放。
所述的升降控制器包括壳体和安装在壳体内的升降数据处理芯片、红外测距传感器、支柱、钢丝细线、挡板和弹簧;壳体顶端安装有用于与连接器连接的螺纹头,壳体内顶部安装有升降数据处理芯片和红外测距传感器,壳体内中心设有支柱,支柱上活动套有挡板,红外测距传感器的探头朝向正下方的挡板;弹簧套在挡板与壳体内底面之间的支柱上,挡板中心连接细钢丝的一端,钢丝细线的另一端向下贯穿过支柱中空管道连接挂钩,挂钩悬挂于壳体外部连接所述牵引绳。
所述的水平移动控制器包括摇杆电位器、保护电阻、水平移动数据处理芯片和固定底板,固定底板固定安装在固定外壳,固定底板内安装有水平移动数据处理芯片,摇杆电位器和保护电阻固定安装在固定底板底端,摇杆电位器的摇杆端连接到所述连接器。
所述的连接器的两端均为螺纹凹孔,下端与所述升降控制器上端的螺纹头固定连接,上端与所述水平移动控制器中摇杆电位器的螺纹摇杆固定连接。
所述的红外测距传感器的检测距离为10~80cm,工作电压为5V,工作电流为30mA。
所述的摇杆电位器为具有自动复位功能的带可360°旋转摇杆的电位器,电阻值为5K,角度规格为50°,其摇杆端采用的是螺纹柱体,并与连接器固定连接,确保摇杆进行360°的旋转。
所述的牵引环包括手环和安装在手环上的起飞按钮、降落按钮、无线信号发射器和微型锂电池。
二、一种用于四旋翼无人机的绳牵式控制方法:
四旋翼无人机的机架下部安装有上述绳牵式控制装置,起飞四旋翼无人机后,操控者将牵引环握在手中,通过牵引环的运动控制四旋翼无人机的升降和水平移动:通过上下拉动牵引绳分别控制四旋翼无人机的升降,通过牵引绳水平方向拉动控制四旋翼无人机对应相同方向的水平移动。
通过上下拉动牵引绳,牵引绳带动升降控制器中的弹簧压缩变化,红外测距传感器测量挡板的位移差,无人机中的飞行控制器接收位移差数据进行升降控制。
在保持无人机悬停时,所述弹簧位于压缩中位,其位于总压缩量的一半处。
通过水平方向拉动牵引绳,带动摇杆电位器上的摇杆摆动,使摇杆电位器产生相应的电信号变化,无人机中的飞行控制器接收电信号变化数据控制水平移动。
在保持无人机悬停时,所述摇杆电位器的中位位于其摇杆摆动的中心。
水平移动控制器实时将摇杆电位器的电信号值通过水平移动数据处理芯片进行相应处理送至四旋翼无人机的飞行控制器。
水平移动控制器内部的摇杆电位器具有复位功能,在四旋翼无人机完成相应的姿态变化之后,摇杆电位器的电信号不再发生变化,即四旋翼无人机的飞行姿态不再进行变化。
升降控制器实时将红外测距传感器测到的距离值通过升降数据处理芯片进行相应处理送至四旋翼无人机的飞行控制器。
升降控制器内部的弹簧在四旋翼无人机进行相应的高度变化之后复位至初始位置,红外测距传感器检测的距离值与初始值相等,即四旋翼无人机的飞行高度不再进行变化。
本发明的有益效果是:
本发明装置具有结构简单、携带方便、成本低廉、反应灵活、操作简单、安全性高等特点,且利用绳子尾端所连接的牵引环,操控者只需要通过一只手牵着一根线来控制四旋翼无人机,整个操作过程操作者通过手对绳子的牵引角度来控制四旋翼无人机的水平移动,通过手对绳子的牵引力大小来控制四旋翼无人机的飞行高度,类似于过去放风筝一样简单,这使得没有操控能力和经验的人也可以自由简单地操控四旋翼无人机。
本发明可大大地改善了四旋翼无人机以往那种复杂繁琐的控制方式,极大程度地避免了由于操作不当而引发的安全事故,推动了四旋翼无人机走近我们生活的脚步。
附图说明
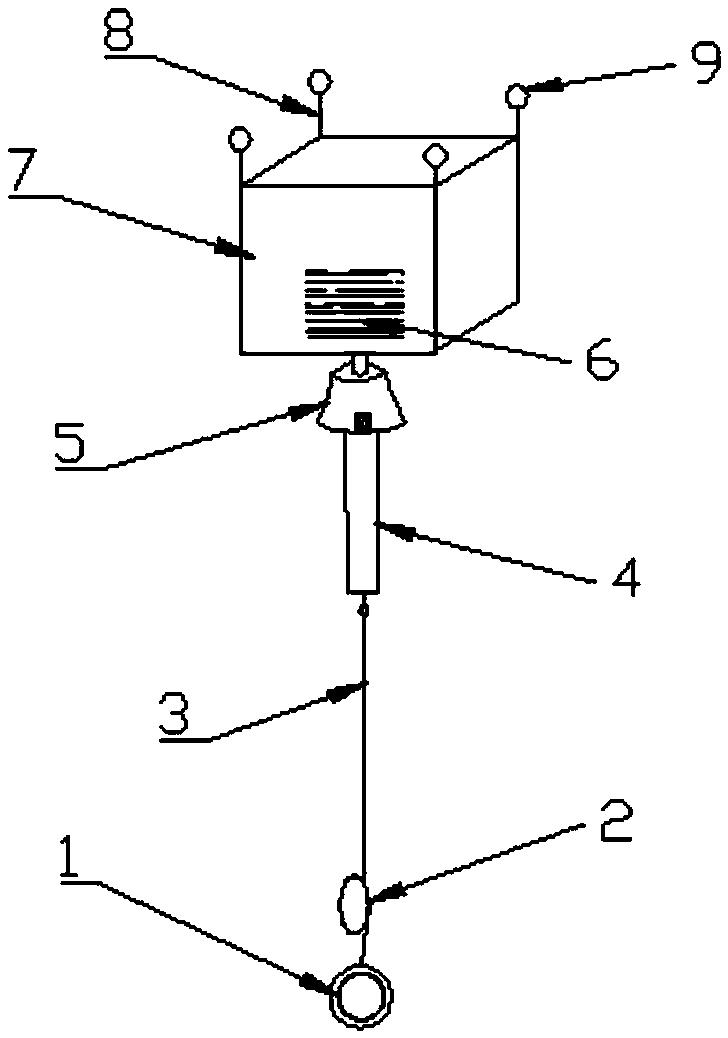
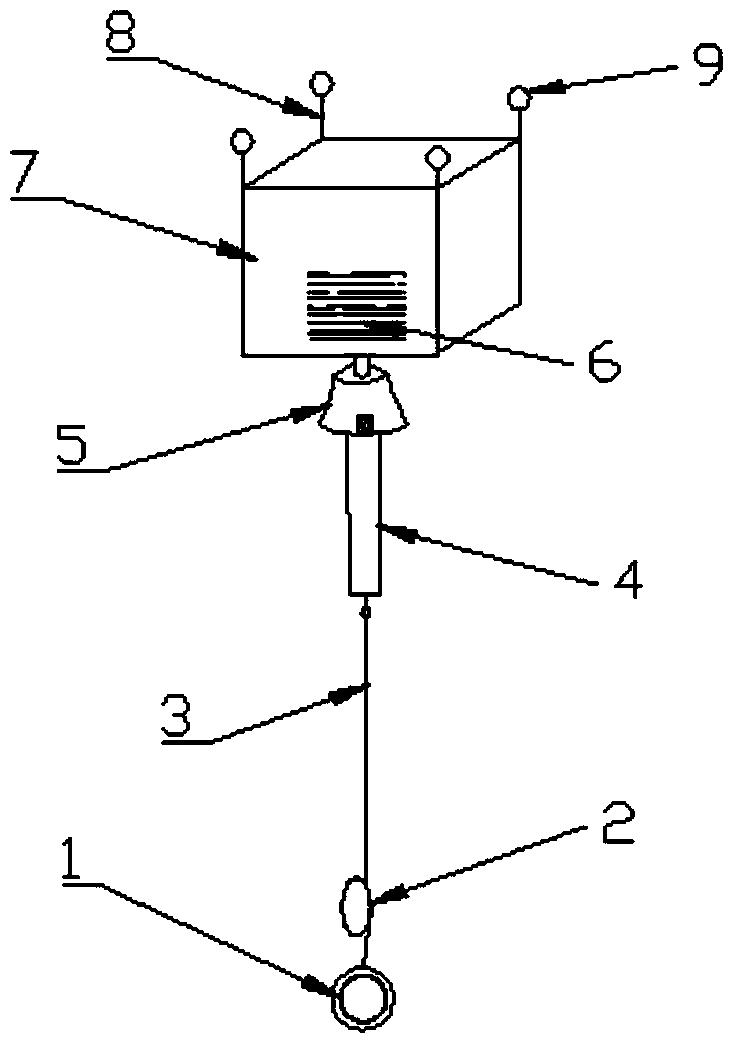
图1为本发明装置结构示意图。
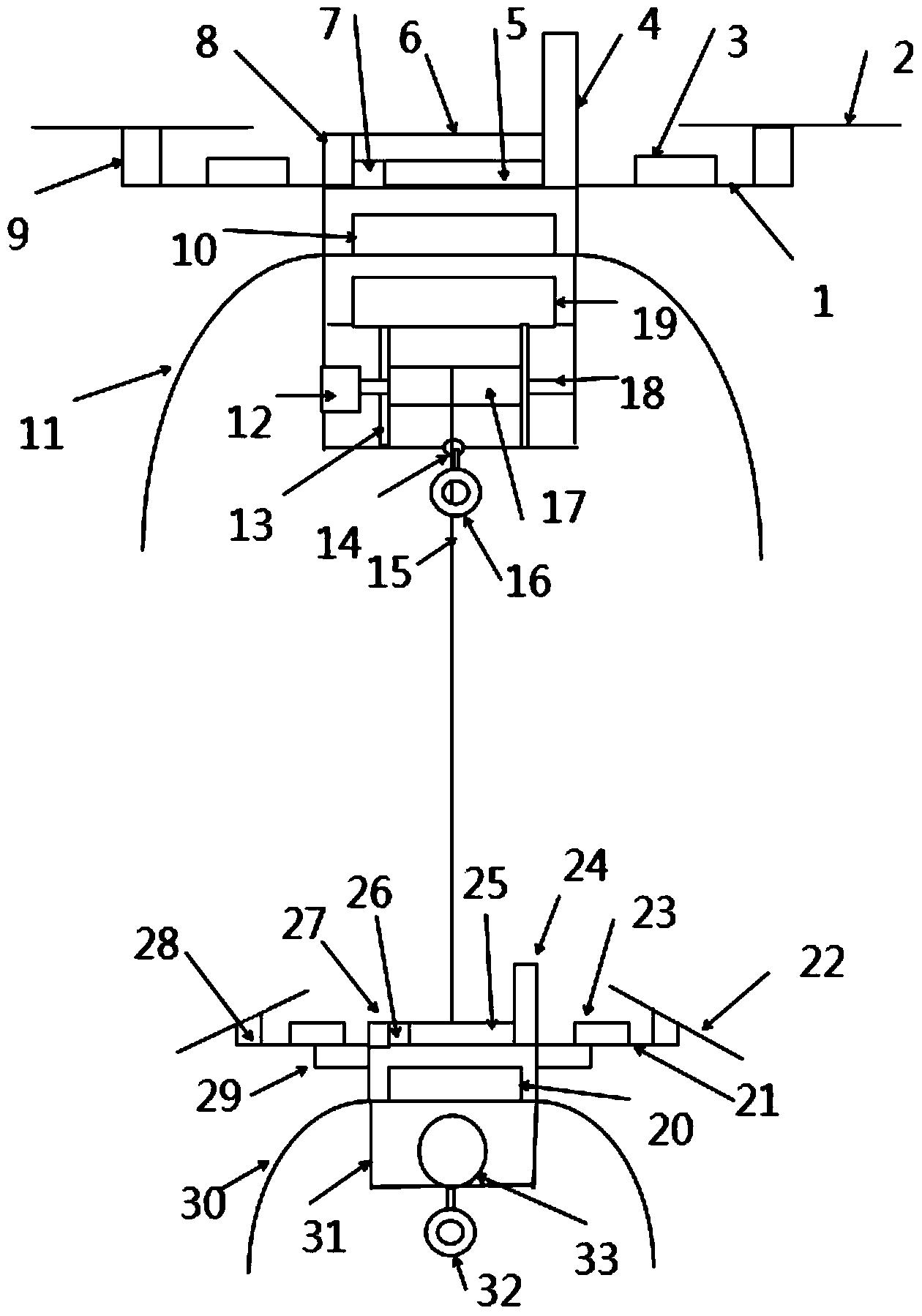
图2为牵引环的结构示意图。
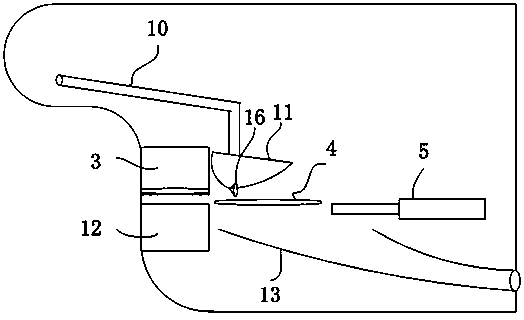
图3为力度控制器的结构示意图。
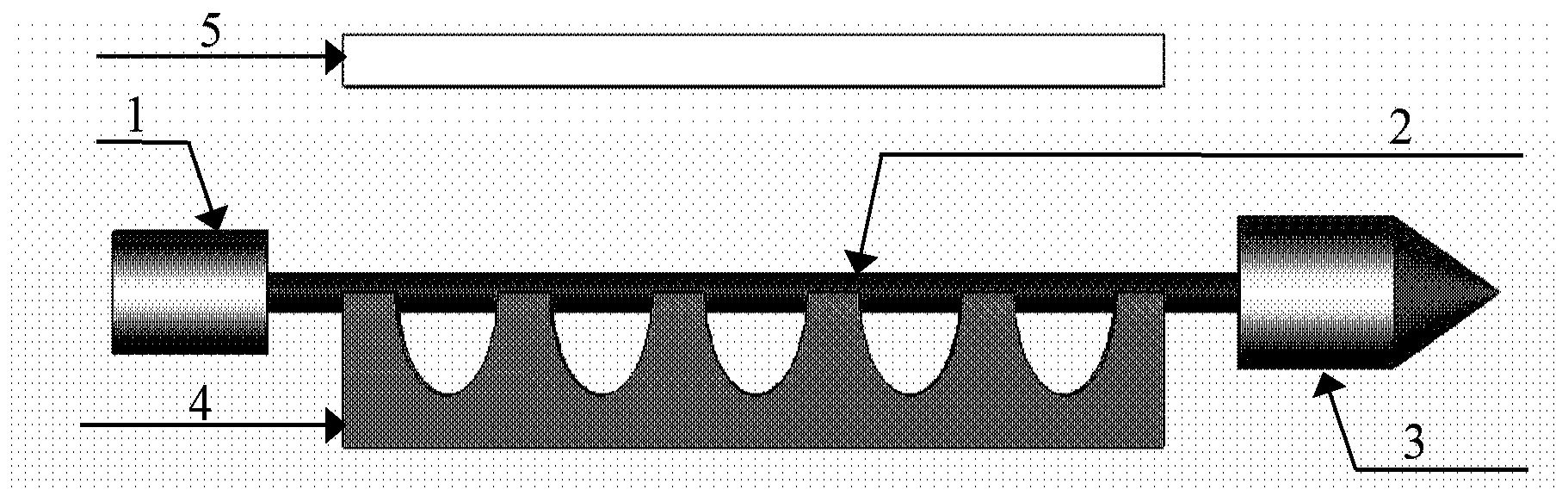
图4为水平移动控制器的结构示意图。
图5为本发明绳牵式控制方法流程示意图。
图中:1、牵引环,2、收线器,3、牵引线,4、升降控制器,5、连接器,6、水平移动控制器,7、固定外壳,8、固定支架,9、支架脚,1.1、手环,1.2、起飞按钮,1.3、降落按钮,1.4、无线信号发射器,1.5、微型锂电池,4.1、螺纹头,4.2、升降数据处理芯片,4.3、红外测距传感器,4.4、支柱,4.5、挡板,4.6、钢丝细线,4.7、弹簧,4.8、挂钩,6.1、摇杆电位器,6.2、保护电阻,6.3、水平移动数据处理芯片,6.4、固定底板。
具体实施方式
以下将参照附图,对本发明进行详细的描述。
如图1所示,本发明装置包括牵引环1、收线器2、牵引绳3、升降控制器4、连接器5、水平移动控制器6、固定外壳7、固定支架8和支架脚9;固定外壳7顶面的四角固定有固定支架8,固定支架8通过支架脚9连接安装在四旋翼无人机的机架底面,水平移动控制器6安装在固定外壳7内的底部,并通过连接器5与下方升降控制器4的上端连接,升降控制器4的下端经牵引线3与用于收放牵引线3的收线器2连接进行,收线器2连接到尾端作为人手持控制的牵引环1。牵引环1套在操控者手腕上,防止牵引绳3脱落。
牵引绳3采用刚性良好的尼龙绳,其总长为10米、直径为2毫米,通过收线器2进行收放。
如图3所示,升降控制器4包括壳体和安装在壳体内的升降数据处理芯片4.2、红外距离传感器4.3、支柱4.4、细钢丝4.6、用于反射红外光的挡板4.5和弹簧4.7;壳体顶端安装有用于与连接器5连接的螺纹头4.1,壳体内顶部安装有升降数据处理芯片4.2和红外距离传感器4.3,壳体内中心设有支柱4.4,支柱4.4上活动套有挡板4.5,红外距离传感器4.3的探头朝向正下方的挡板4.5;弹簧4.7套在挡板4.5与壳体内底面之间的支柱4.4上,挡板4.5中心连接细钢丝4.6的一端,细钢丝4.6的另一端向下贯穿过支柱4.4中空管道连接挂钩4.8,挂钩4.8悬挂于壳体外部连接所述牵引线3。红外距离传感器4.3连接升降数据处理芯片4.2输出挡板4.5位移数据。
如图4所示,水平移动控制器6包括摇杆电位器6.1、保护电阻6.2、水平移动数据处理芯片6.3和固定底板6.4,固定底板6.4固定安装在固定外壳7,固定底板6.4内安装有水平移动数据处理芯片6.3,摇杆电位器6.1和保护电阻6.2固定安装在固定底板6.4底端,其摇杆端采用的是螺纹柱体,与连接器5连接,确保摇杆进行360°的旋转。摇杆电位器6.1连接水平移动数据处理芯片6.3输出其摇杆摆动角度数据。
连接器5的两端均为螺纹凹孔,下端与所述升降控制器4上端的螺纹头4.1固定连接,上端与所述水平移动控制器6中摇杆电位器6.1的螺纹摇杆固定连接。
红外测距传感器4.3的检测距离为10~80cm,工作电压为5V,工作电流为30mA。
摇杆电位器6.1为具有自动复位功能的带可360°旋转摇杆的电位器,电阻值为5K,角度规格为50°,其摇杆端采用的是螺纹柱体,并与连接器5固定连接,确保摇杆进行360°的旋转。
如图2所示,牵引环1包括手环1.1和安装在手环1.1上的起飞按钮1.2、降落按钮1.3、无线信号发射器1.4和微型锂电池1.5,无线信号发射器1.4将起飞按钮1.2和降落按钮1.3的信号送给四旋翼无人机的飞行控制器,微型锂电池为起飞按钮1.2、降落按钮1.3和无线信号发射器1.4供电。
如图5所示,本发明的具体实施过程如下:
操控者按照要求将绳牵式控制装置安装在四旋翼无人机的机架下方,在四旋翼无人机的安全距离后按下牵引环1上的起飞按钮1.2,四旋翼无人机缓缓起飞,最终悬停在8米高的空中;操控者将牵引环1握在手中,
一方面,可以通过改变手势水平拉动牵引绳3,牵引绳3带动升降控制器4,由于升降控制器4、连接器5和水平移动控制器6的摇杆电位器6.1上的螺纹摇杆之间是固定连接的,所以可以带动螺纹摇杆进行相应角度的摇动,即可使摇杆电位器6.1产生相应的电信号变化,将此信号通过水平移动数据处理芯片6.3处理后送至四旋翼无人机的飞行控制器,飞行控制器产生对应的控制信号,控制四旋翼无人机进行对应的姿态变化,并产生对应的水平位置变化。
具体实施中,操控者可将牵引手环1握在手中拉动牵引绳3向前走1米,此时牵引绳3带动升降控制器4,进而带动摇杆进行相应角度的转动,即可使电位器产生相应的电信号变化,推算其摇杆转动的角度大约在7.9°左右,将此信号送至四旋翼无人机的飞行控制器,飞行控制器产生对应的信号,控制四旋翼无人机向前飞行1米,使水平移动控制器6的摇杆复位。在实际测试中,为排除风力的影响,故在飞行控制器控制程序中加入了一个最低偏转量,设定为5°,即只有当水平移动控制器6的摇杆转动的角度大于5°时,飞行控制器才会产生对应的信号,控制四旋翼无人机进行对应的姿态变化。
另一方面,操控者可以通过操作收线器2改变四旋翼无人机的飞行高度,按下收线器2上的收线按钮即会对牵引线3产生一个拉力,从而通过细钢丝4.6拉动升降控制器4内部的挡板4.5,红外测距传感器4.3测到不同的距离信号,将此信号通过升降数据处理芯片4.2处理后送至四旋翼无人机的飞行控制器,飞行控制器产生对应的控制信号,控制四旋翼无人机进行对应的高度变化。
操控者按下收线器2上的收线按钮即会对牵引线3产生一个拉力,从而拉动升降控制器4内部的挡板4.5,红外测距传感器4.3测到相应的距离值,具体来说,收线器2收线产生的拉力大小是固定的,当按下收线按钮时,即对牵引线3产生了拉力,牵引线3拉住升降控制器4尾端的挂钩4.8从而拉动柱体内部的挡板4.5,这是拉力的直接作用。当拉动钢丝细线4.6之后,由于柱体内部的弹簧4.7产生的反弹力使得拉力的作用间接导致弹簧4.7发生形变,即挡板4.5产生一定的位移,改变红外测距传感器4.3测量的结果。将此测量结果通过升降数据处理芯片4.2处理后送至四旋翼无人机的飞行控制器,飞行控制器产生相应的信号,控制四旋翼无人机进行高度变化。在实际测试中,通过收线器2收进1米长的牵引线,四旋翼无人机下降的高度也在1米左右。
由此可见,本发明利用先进的传感器技术和数据处理技术对四旋翼无人机进行便捷控制,大大地改善了四旋翼无人机以往那种复杂繁琐的控制方式,极大程度地避免了由于操作不当而引发的安全事故,能推动四旋翼无人机走近大众生活的脚步,技术效果显著突出。
以上所述仅为本发明的实施例而已,并不用于限制本发明。本发明可以有各种合适的更改和变化。凡在本发明的精神和原则之内所做的任何改动、等同替换改进等,均应包含在本发明的保护范围之内。
用于四旋翼无人机的绳牵式控制装置和控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0