

IPC分类号 : B62D5/00,B62D5/04,B62D3/02,B62D6/00,B62D119/00,B62D113/00,B62D137/00






专利摘要
本实用新型属于汽车转向系统中的线控转向系统技术领域,具体地说是一种自动驾驶汽车线控转向系统的设计。该转向系统组成上包括主控制器、转向操纵机构、转向执行机构、横拉杆、转向轮、电磁离合器和车轮转角传感器等;本实用新型是一种结构简单的自动驾驶汽车线控转向系统,改进了目前已有的线控转向系统结构使其更好地应用在自动驾驶汽车上,保证自动驾驶汽车能实现前轮线控转向,并且在转向电机出现故障时,该系统可以转化为传统机械式转向系统,使汽车的转向具有良好的可控性和安全性,解决了线控转向系统目前存在的问题。
权利要求
1.一种自动驾驶汽车线控转向系统,其特征在于,该转向系统包括主控制器、横拉杆、转向轮、转向操纵机构、转向执行机构、常开式电磁离合器(11)和车轮转角传感器;所述转向操纵机构包括力感电机(5)、三级行星齿轮减速机构(6)、锥齿轮(7)、方向盘转矩传感器(8)、方向盘转角传感器(9)和方向盘(10);所述转向执行机构包括转向电机(1)、常闭式电磁离合器(2)、蜗轮蜗杆减速机构(3)、齿轮齿条转向器(4);所述主控制器的输入与车轮转角传感器、方向盘转矩传感器(8)、方向盘转角传感器(9)相连;所述主控制器的输出与转向操纵机构中的力感电机(5)相连;所述力感电机(5)的输出轴与三级行星齿轮减速机构(6)中的高速级太阳轮(601)连接;所述三级行星齿轮减速机构(6)的输出轴与锥齿轮(7)的输入轴连接;所述锥齿轮(7)的输出端与方向盘(10)的转向轴连接,其上有方向盘转矩传感器(8)和方向盘转角传感器(9);所述齿轮齿条转向器(4)与横拉杆连接;所述横拉杆与转向轴的转向臂连接;所述转向轴与转向轮连接;所述常开式电磁离合器(11)的内花键与锥齿轮(7)输出轴的外花键连接;所述常闭式电磁离合器(2)的内花键与转向电机(1)输出轴上的外花键相啮合;所述蜗轮蜗杆减速机构(3)中的蜗杆轴(303)的外花键与常闭式电磁离合器(2)的内花键相啮合。
2.根据权利要求1所述一种自动驾驶汽车线控转向系统,其特征在于,所述蜗轮蜗杆减速机构(3)还包括蜗杆(301)、蜗轮(302)、蜗轮轴(304);所述蜗杆轴(303)与常闭式电磁离合器(2)相连;所述常闭式电磁离合器(2)与转向电机(1)相连;所述蜗杆(301)与蜗轮(302)相啮合;所述蜗轮轴(304)设置在蜗轮(302)的中间孔内通过平键与蜗轮(302)固定,蜗轮轴上有一部分为齿轮(401);所述蜗轮轴(304)上齿轮(401)一侧的末端设置有滚针轴承。
3.根据权利要求2所述一种自动驾驶汽车线控转向系统,其特征在于,所述蜗轮轴(304)上蜗轮(302)处有一对深沟球轴承。
4.根据权利要求1所述一种自动驾驶汽车线控转向系统,其特征在于,所述三级行星齿轮减速机构(6)还包括高速级太阳轮(601)、高速级行星轮(602)、高速级行星架(603)、中速级太阳轮(604)、中速级行星轮(605)、中速级行星架(606)、低速级太阳轮(607)、低速级行星轮(608)、低速级行星架(609)和齿圈(610);所述高速级行星轮(602)、中速级行星轮(605)和低速级行星轮(608)通过行星架上的短轴与高速级行星架(603)、中速级行星架(606)和低速级行星架(609)连接;所述高速级太阳轮(601)与高速级行星轮(602)相啮合;所述中速级太阳轮(604)与中速级行星轮(605)相啮合;所述低速级太阳轮(607)和低速级行星轮(608)相啮合;所述齿圈(610)的内齿与高速级行星轮(602)、中速级行星轮(605)和低速级行星轮(608)相啮合,外部固定在力感电机(5)的壳体上。
5.根据权利要求4所述一种自动驾驶汽车线控转向系统,其特征在于,所述高速级太阳轮(601)、中速级太阳轮(604)、低速级太阳轮(607)、高速级行星轮(602)、中速级行星轮(605)和低速级行星轮(608)的模数均相同,均采用直齿齿轮。
6.根据权利要求1所述一种自动驾驶汽车线控转向系统,其特征在于,所述齿轮齿条转向器(4)包括齿轮(401)和齿条(402);所述齿轮(401)与齿条(402)相啮合;所述齿轮(401)采用斜齿轮;所述齿条(402)的两个端头与左右横拉杆端头连接在一起。
说明书
技术领域
本实用新型属于汽车转向系统中的线控转向系统技术领域,具体的说是一种自动驾驶汽车线控转向系统。
背景技术
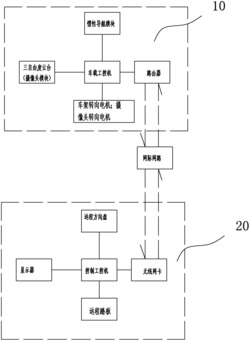
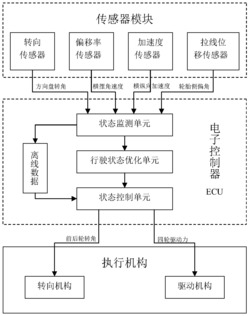
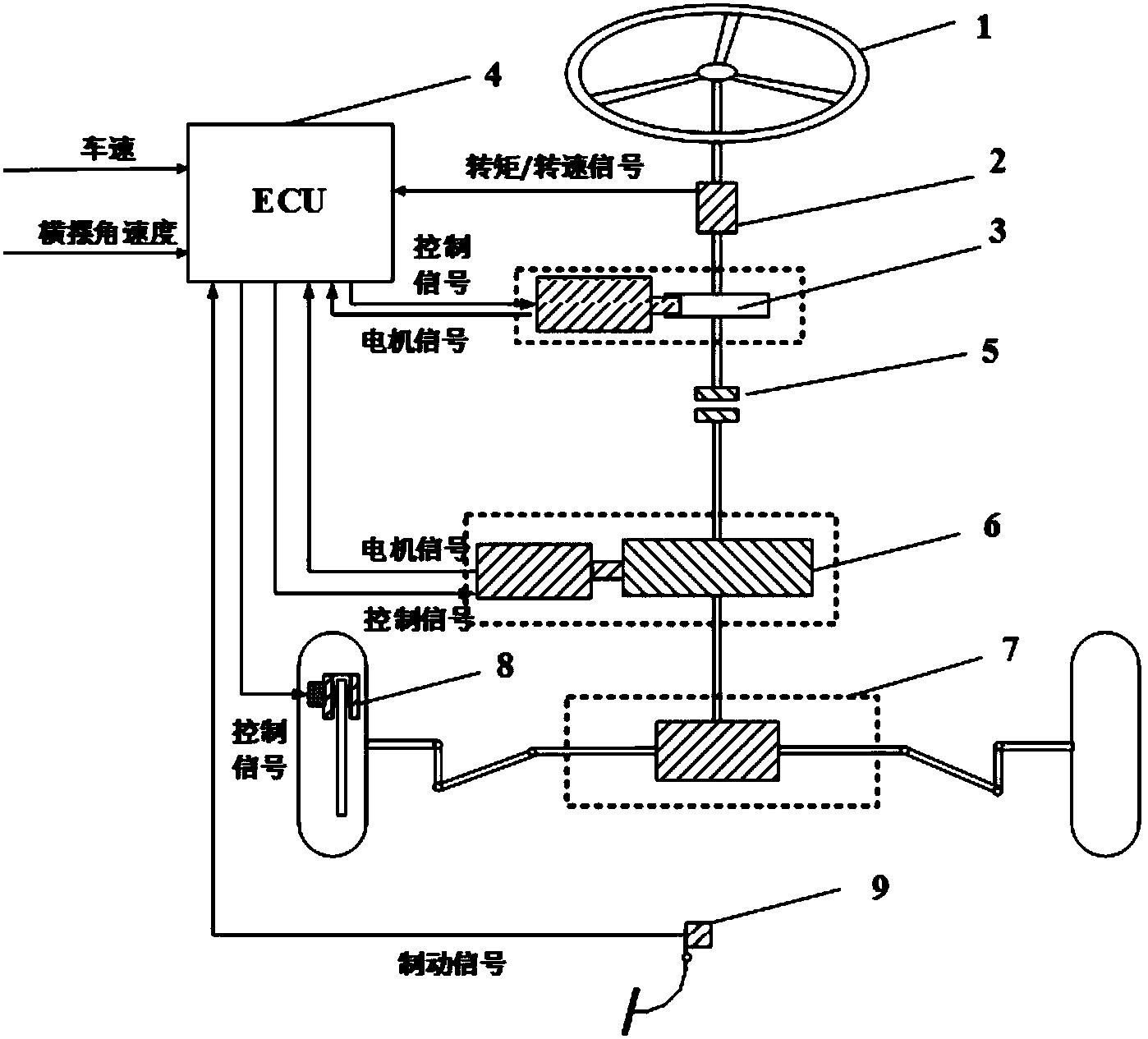
随着汽车智能化水平的发展,汽车转向系统也从传统的机械式转向逐渐发展为液压助力转向、电控助力转向以及如今在自动驾驶汽车中常见的线控转向。线控转向系统除了原始的方向盘和转向轮装置外,还增加了主控制器(ECU)、电动机、自动防故障系统、传感器等辅助机构。转向时,主控制器ECU获得来自于车速、转速等传感器传来的数据信息,主控制器根据接收到的信息分别向转向电机和力感电机发送控制指令,使转向电机输出一定的转矩,并通过转向系统将动力传递到转向器,进而带动车轮转向。力感电机输出的动力经减速器减速增扭后传到方向盘处,带动方向盘转动。同时,转向执行机构还可以将车轮转角信息反馈给ECU,ECU将该信息输送到转向盘处使驾驶员更好地了解到路感信息。和传统转向系统相比线控系统取消了一部分机械连接结构,因此更有利于降低整车重量;同时,只有在汽车转向时,转向电机处才有功率输出,更有利于减少能源消耗。
在法兰克福汽车博览会上,奔驰公司展示了其新一代应用线控转向技术的自动驾驶样车。同年,由操纵杆操纵的线控转向系统被列为自动驾驶领域十大新技术之一。2015年12 月,采用线控转向技术的百度无人车首次进行道路实测,在高速公路等多种复杂路况下通过了自动驾驶道路测试,最快时速度可以达到每小时100公里。
目前,线控转向系统大面积应用在自动驾驶汽车的转向系统中,主要是因为其减轻了驾驶员的操作,在各种不同的道路环境下,都能保证汽车准确可靠地进行转向,对提高整个系统的驾驶平顺性和道路交通安全性具有十分深远的研究意义。如今,线控转向系统已经在船舶、飞机和许多工程机械中得到了广泛的应用,其在提高汽车的空间利用率、减少事故发生率等方面有着突出的优势。
发明内容
本实用新型提供了一种结构简单的自动驾驶汽车线控转向系统,改进了目前已有的线控转向系统结构使其更好地应用在自动驾驶汽车上,保证自动驾驶汽车能实现前轮线控转向,并且在转向电机出现故障时,可以转化为传统机械式转向系统,使汽车的转向系统具有良好的可控性和安全性,解决了线控转向系统存在的问题。
本实用新型技术方案结合附图说明如下:
一种自动驾驶汽车线控转向系统,该转向系统包括主控制器、横拉杆、转向轮、转向操纵机构、转向执行机构、常开式电磁离合器11和车轮转角传感器;所述转向操纵机构包括力感电机5、三级行星齿轮减速机构6、锥齿轮7、方向盘转矩传感器8、方向盘转角传感器9和方向盘10;所述转向执行机构包括转向电机1、常闭式电磁离合器2、蜗轮蜗杆减速机构3、齿轮齿条转向器4;所述主控制器的输入与车轮转角传感器、方向盘转矩传感器 8、方向盘转角传感器9相连;所述主控制器的输出与转向操纵机构中的力感电机5相连;所述力感电机5的输出轴与三级行星齿轮减速机构6中的高速级太阳轮601连接;所述三级行星齿轮减速机构6的输出轴与锥齿轮7的输入轴连接;所述锥齿轮7的输出端与方向盘10的转向轴连接,其上有方向盘转矩传感器8和方向盘转角传感器9;所述齿轮齿条转向器4与横拉杆连接;所述横拉杆与转向轴的转向臂连接;所述转向轴与转向轮连接;所述常开式电磁离合器11的内花键与锥齿轮7输出轴的外花键连接;所述常闭式电磁离合器 2的内花键与转向电机1输出轴上的外花键相啮合;所述蜗轮蜗杆减速机构3中的蜗杆轴 303的外花键与常闭式电磁离合器2的内花键相啮合。
所述蜗轮蜗杆减速机构3还包括蜗杆301、蜗轮302、蜗轮轴304;所述蜗杆轴303与常闭式电磁离合器2相连;所述常闭式电磁离合器2与转向电机1相连;所述蜗杆301与蜗轮302相啮合;所述蜗轮轴304设置在蜗轮302的中间孔内通过平键与蜗轮302固定,蜗轮轴上有一部分为齿轮401;所述蜗轮轴304上齿轮401一侧的末端设置有滚针轴承。
所述蜗轮轴304上蜗轮302处有一对深沟球轴承。
所述三级行星齿轮减速机构6还包括高速级太阳轮601、高速级行星轮602、高速级行星架603、中速级太阳轮604、中速级行星轮605、中速级行星架606、低速级太阳轮607、低速级行星轮608、低速级行星架609和齿圈610;所述高速级行星轮602、中速级行星轮 605和低速级行星轮608通过行星架上的短轴与高速级行星架603、中速级行星架606和低速级行星架609连接;所述高速级太阳轮601与高速级行星轮602相啮合;所述中速级太阳轮604与中速级行星轮605相啮合;所述低速级太阳轮607和低速级行星轮608相啮合;所述齿圈610的内齿与高速级行星轮602、中速级行星轮605和低速级行星轮608相啮合,外部固定在力感电机5的壳体上。
所述高速级太阳轮601、中速级太阳轮604、低速级太阳轮607、高速级行星轮602、中速级行星轮605和低速级行星轮608的模数均相同,均采用直齿齿轮。
所述齿轮齿条转向器4包括齿轮401和齿条402;所述齿轮401与齿条402相啮合;所述齿轮401采用斜齿轮;所述齿条402的两个端头与左右横拉杆端头连接在一起。
本实用新型的有益效果为:
1.本实用新型中在转向操纵机构和转向传动机构之间有一个常开式电磁离合器,正常工作时它是断开的,当系统发生故障时闭合。保证了汽车在正常情况下,通过线控的方式实现转向;当系统中任一部件发生故障时,通过传统机械方式实现汽车转向。保证了自动驾驶汽车在任何情况下都能正常转向,符合汽车设计时对转向系统有转向稳定性的要求。
2.本实用新型中,转向盘和转向轮的转动分别由转向电机和力感电机来控制。转向轮处减速机构采用蜗轮蜗杆减速机构,减速比更大;转向盘处减速机构采用三级行星排减速机构,效率高,占用空间体积小,减速比更大。
3.与传统机械式转向系统相比,省去了机械连接结构,简化了生产工艺和制造过程,更有利于降低整车的重量,避免了正面碰撞时转向系统对驾驶员的二次伤害以及减小了底盘的震动,提高了驾驶舒适性。
4.该系统中,转向电机和力感电机由控制器ECU控制,其输出的转矩、转速数值是经过计算的,有利于节约电机输出的能源,保证只有在汽车需要转向时电机处才有功率输出,这样更有利于减少能源消耗,对环境更加友好;
5.本实用新型采用两个电磁离合器,一个位于转向电机和蜗轮蜗杆减速器之间,采用常闭式电磁离合器,确保线控转向系统只在特定的车速范围内起作用。当高于规定车速时,离合器分离,暂停助力作用。此时,转向原理和传统机械转向系统相同。另一个位于蜗轮轴和锥齿轮箱之间,采用常开式电磁离合器,系统正常工作时该离合器断开转向操纵机构和转向执行机构的连接,实现线控转向;当系统中任一部件发生故障时,该离合器闭合,即恢复转向操纵机构和转向执行机构之间的连接,实现机械式转向。该系统中两个电磁离合器的存在保证了整个系统在任何情况下都能保证汽车正常转向;
6.本实用新型采用两个电机,力感电机5和转向电机1接受主控制器ECU的指令,输出一定的转矩和功率。主要考虑电机负载和电机的工作条件两个方面,如负载的类型、功率、工作制(长时间连续工作,短时间断续型工作,负载可变式工作模式),电机正常工作时输出的特性参数等。最终选择永磁直流有刷电机,该电机损耗小,寿命长,电机效率高,转动惯量小,可靠性好。同时,该类型的电机作出响应快、体积小、质量轻、调速范围广。
附图说明
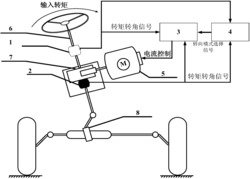
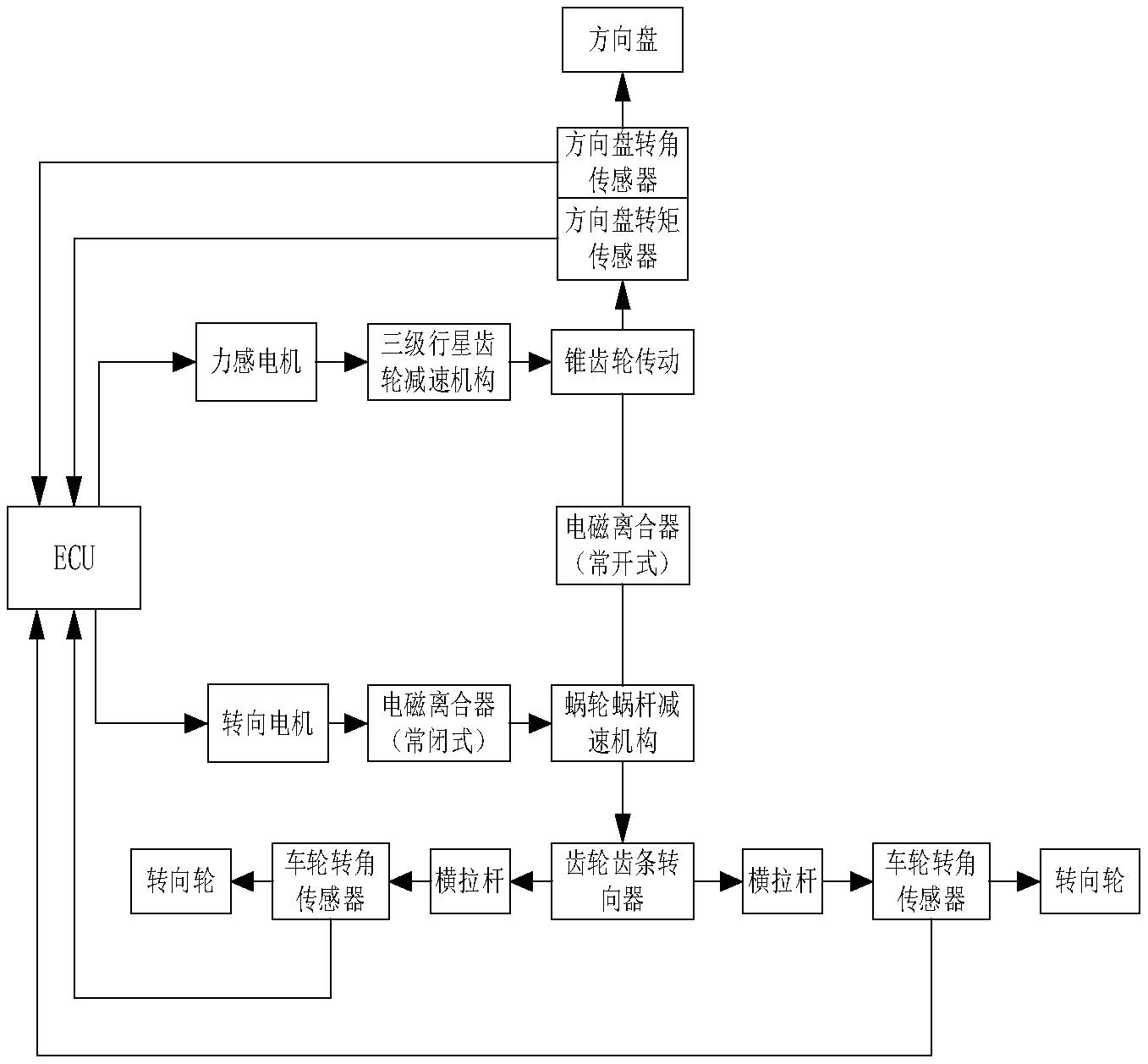
图1为本实用新型中线控转向系统原理图;
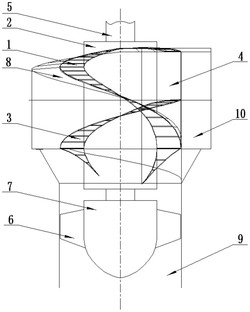
图2为本实用新型中转向执行机构处结构示意图;
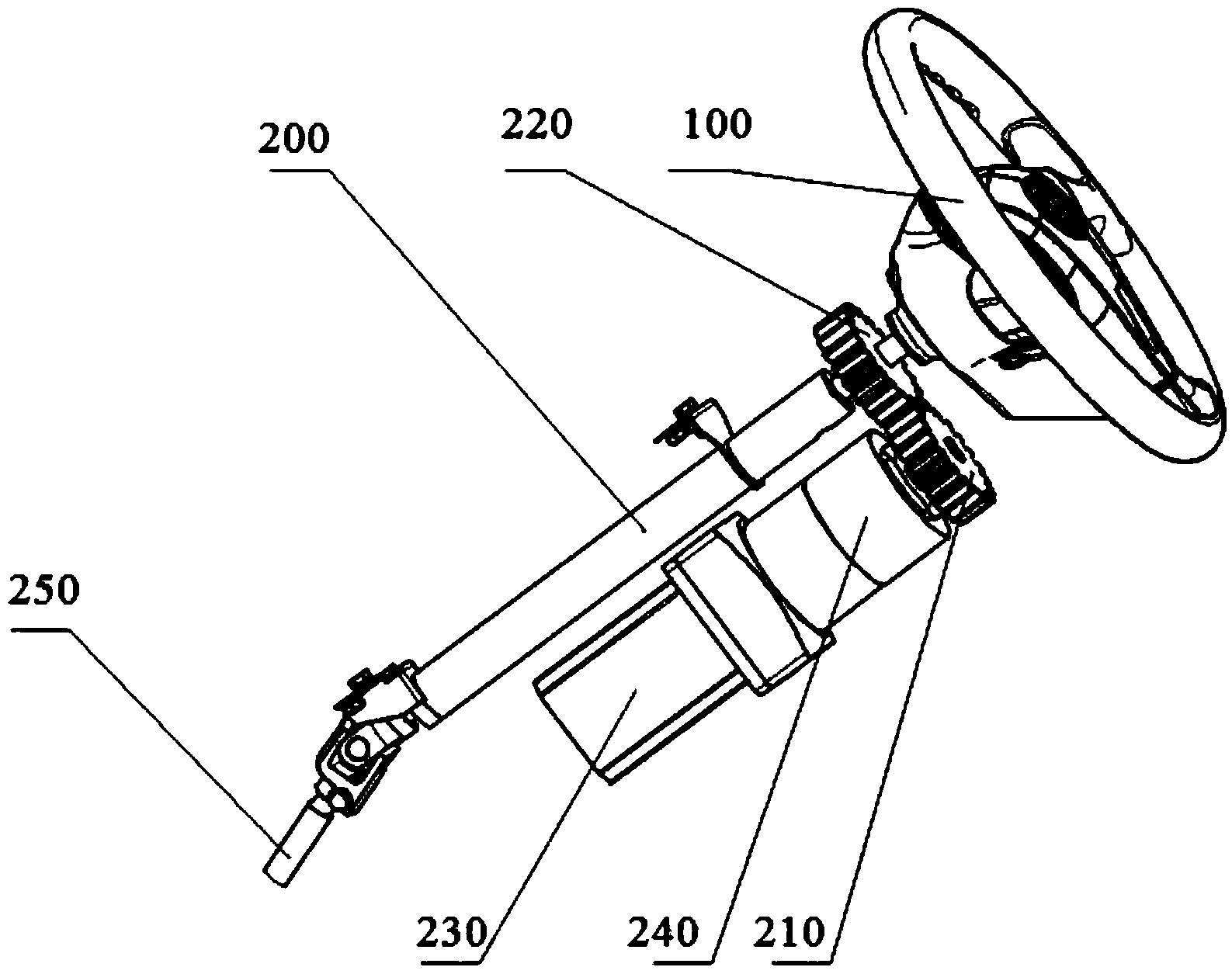
图3为本实用新型中转向操纵机构处结构示意图;
图4为本实用新型的三级行星齿轮减速机构(去掉齿圈)结构示意图;
图5为本实用新型的高速级太阳轮、行星轮、行星架结构示意图;
图6为本实用新型的蜗轮蜗杆减速机构(去掉外壳)结构示意图;
图7为本实用新型的齿轮齿条机构(去掉外壳)结构示意图;
图8为本实用新型的高速级行星架零件的结构示意图;
图9为本实用新型的齿圈零件的结构示意图;
图10为本实用新型的蜗轮零件的结构示意图
图11为本实用新型的蜗杆零件的结构示意图;
图12为本实用新型的齿轮零件的结构示意图;
图13为本实用新型的齿条零件的结构示意图。
图中:1、转向电机;2、常闭式电磁离合器;3、蜗轮蜗杆减速机构;4、齿轮齿条转向器;5、力感电机;6、三级行星齿轮减速机构;7、锥齿轮;8、方向盘转矩传感器;9、方向盘转角传感器;10、方向盘;11、常开式电磁离合器;301、蜗杆;302、蜗轮;303、蜗杆轴;304、蜗轮轴;401、齿轮;402、齿条;601、高速级太阳轮;602、高速级行星轮; 603、高速级行星架;604、中速级太阳轮;605、中速级行星轮;606、中速级行星架;607、低速级太阳轮;608、低速级行星轮;609、低速级行星架;610、齿圈。
具体实施方式
参阅图2、图3,一种自动驾驶汽车线控转向系统,该转向系统包括主控制器、横拉杆、转向轮、转向操纵机构、转向执行机构、常开式电磁离合器11和车轮转角传感器。
参阅图3,所述转向操纵机构包括力感电机5、三级行星齿轮减速机构6、锥齿轮7、方向盘转矩传感器8、方向盘转角传感器9和方向盘10。
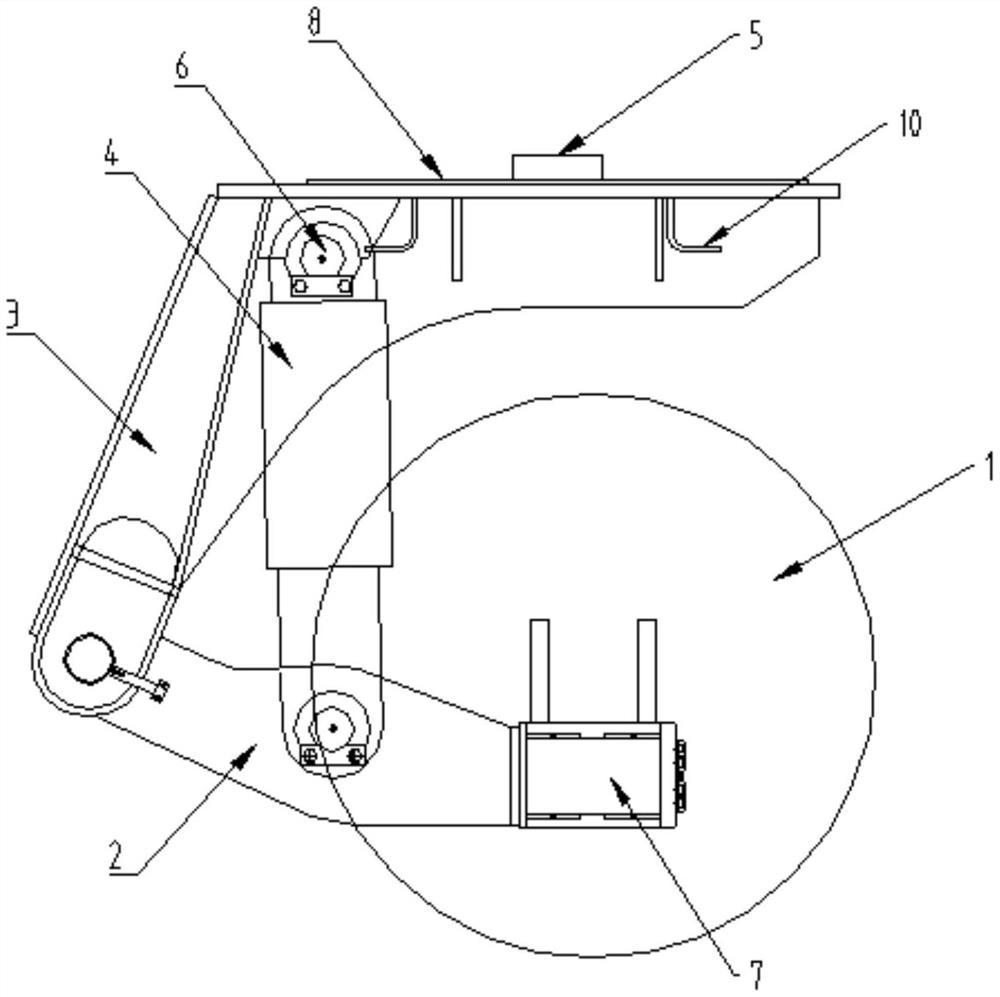
参阅图2、图6、图10和图11,所述转向执行机构包括转向电机1、常闭式电磁离合器2、蜗轮蜗杆减速机构3、齿轮齿条转向器4。
考虑到常闭式电磁离合器2接合的时间远长于断开的时间,转向电机1后的常闭式电磁离合器2采用齿形结构。转向电机1输出轴上制出外花键,通过该外花键与常闭式电磁离合器2的内花键啮合,将转向电机1与常闭式电磁离合器2相连接,实现转矩和动力的传递。同样,蜗杆轴303输入端需制出外花键,与电磁离合器上的内花键相啮合,实现将蜗杆轴与电磁离合器相连。蜗杆301和蜗轮302之间通过蜗杆蜗轮副啮合传递动力,蜗轮 302与轴相连接处,为了满足轴传递运动和转矩的要求,并防止蜗轮302有相对轴的转动,必须进行适当的周向定位和固定,此处采用平键连接来实现定位。蜗轮轴上蜗轮302处有一对深沟球轴承,起到支撑和承载轴及轴上零部件的作用。
参阅图7、图12和图13,所述齿轮齿条转向器4包括齿轮401和齿条402。
齿轮齿条转向器4中的齿轮401采用斜齿轮,由于齿数较少,制成齿轮轴结构,齿轮轴末端有一个滚针轴承,用来支撑齿轮。通过齿轮401和齿条402的啮合作用带动齿条402左右移动,齿条402的移动带动两侧横拉杆移动,进而使两侧车轮转动,实现汽车转向。
参阅图4、图5、图8、图9,所述三级行星齿轮减速机构6还包括高速级行星轮602、高速级行星架603、中速级太阳轮604、中速级行星轮605、中速级行星架606、低速级太阳轮607、低速级行星轮608、低速级行星架609和齿圈610;所述高速级太阳轮601、中速级太阳轮604和低速级太阳轮607通过齿轮轴与高速级行星架603、中速级行星架606 和低速级行星架609连接;所述高速级行星轮602、中速级行星轮605和低速级行星轮608 通过齿轮轴与高速级行星架603、中速级行星架606和低速级行星架609连接;所述高速级太阳轮601与高速级行星轮602相啮合;所述中速级太阳轮604与中速级行星轮605相啮合;所述低速级太阳轮607和低速级行星轮608相啮合;所述齿圈610的内齿与高速级行星轮602、中速级行星轮605和低速级行星轮608相啮合,外部固定在力感电机5的壳体上。所述高速级太阳轮601、中速级太阳轮604、低速级太阳轮607、高速级行星轮602、中速级行星轮605和低速级行星轮608的模数均相同,均采用直齿齿轮。
参阅图3,力感电机5的输出轴与高速级太阳轮601制成一体,力感电机5的转动带动高速级太阳轮601转动,通过太阳轮和行星轮的啮合作用带动行星轮转动,行星轮转动带动行星架转动,使高速级转矩转速从太阳轮输入行星架输出到下一级的太阳轮上,依次传递,最终转矩转速从低速级行星架输出。行星齿轮减速机构6的输出轴与锥齿轮箱7的输入轴相连,锥齿轮箱中的锥齿轮组传动比为1,只起到改变动力传递方向的作用,不改变输入输出的转矩转速数值。锥齿轮箱左端输入轴和三级行星排减速机构6中的低速级行星架609后的输出轴通过花键相连;锥齿轮箱右侧轴一端和方向盘转轴相连,将动力传递到方向盘一侧,另一端通过花键连接常开式电磁离合器11。该锥齿轮箱起到将上面方向盘模块和下面转向轮模块连接起来的作用。锥齿轮7输出端与方向盘转轴相连,其上有方向盘转矩传感器8和方向盘转角传感器9,测量方向盘信号传递给主控制器即ECU。锥齿轮轴的转动带动方向盘转轴转动,进而使方向盘在电机5的控制下转动适当的角度,满足自动驾驶时方向盘自动转动和回正,不需要人为操作。传动比为1的锥齿轮7起到变换动力传递的角度的作用,同时将转向操纵机构和转向执行机构两部分连接起来。
参阅图4,通过高速级太阳轮601和高速级行星轮602的啮合作用将动力传递到行星架 603,进而传递到中速级太阳轮604,带动中速级行星轮605和行星架606转动,最终动力传递到低速级太阳轮607、行星轮608、行星架609,实现动力从太阳轮输入,行星架输出。该行星排机构由于有三级减速,每一级的减速比均较小,太阳轮和行星轮尺寸也较小,因而该结构中行星轮和行星架之间不设置滚动轴承,行星架兼起到滑动轴承的作用。三级行星排机构共用一个齿圈610,外齿圈固定,内部有齿与行星轮啮合。设计时三级各个齿轮的模数均相同,均采用直齿齿轮,传动比分配规则为:保证各级传动之间强度近似相等,整个行星排外形尺寸尽可能小,同时还要使整个减速机构实际传动比与理论传动比的误差小于5%。经过行星排机构进行减速增扭后,转矩和转速传递到方向盘上,控制其转动。
转向操纵机构工作流程如下:ECU接受方向盘转角传感器和方向盘转矩传感器发送过来的信息,对力感电机5发出控制指令。力感电机作为该部分的动力输入,通过一个三级行星排减速机构6将电机输出的转矩放大,减小输出转速。之后,动力传递到转向轴处,带动方向盘10转动。
转向执行机构工作流程如下:ECU接受两侧车轮转角传感器发送过来的车轮信息,对转向电机1发出控制指令。转向电机1作为该部分的动力输入,电机输出轴与蜗杆输入轴303相连接,蜗轮蜗杆减速器3的作用是增大电机输出的转矩同时减小其输出的转速。蜗轮轴304与齿轮齿条转向器4中的齿轮轴制成一体,因此蜗轮302转动带动齿轮401转动,通过齿轮齿条的啮合作用带动齿条402左右移动,再通过左右横拉杆等机械结构带动前轮转向,实现驾驶员的转向意图。当车速过高时,转向电机后面的常闭式电磁离合器2断开,线控转向失效,该车通过机械式结构实现汽车转向。
参阅图1,工作过程中,主控制器ECU对转向电机1发出控制指令,其后是一个电磁离合器2,平时是闭合的。减速机构采用蜗轮蜗杆3,减速比大且空间体积较小。电机输出轴和蜗杆输入轴303通过花键相连,使电机输出的转矩转速传递到蜗杆处。通过蜗杆301 和蜗轮302的啮合作用,根据蜗轮蜗杆齿数的不同,二者之间有一个减速比,起到增大电机输出的转矩同时减小电机输出的转速的作用。蜗轮轴304和齿轮轴为一根轴,该轴的转动带动齿轮转动,通过齿轮401和齿条402的啮合作用将齿轮的转动转化为齿条的左右移动,通过两侧的横拉杆实现车轮转动。同时,主控制器ECU还控制力感电机5,电机输出的转矩、转速经过减速机构减速增扭后带动方向盘转动和回正。此处采用三级行星齿轮减速机构6,总减速比大,机构空间体积小,零件数目较多,每一级的太阳轮、行星轮尺寸均较小。该发明中的线控转向结构减小了人的工作,电机输出的转矩转速数值都是通过内部控制器计算得到的,数值更加精确,节约电力,符合自动驾驶汽车的要求。
一种自动驾驶汽车线控转向系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0