

IPC分类号 : C22C28/00,C22C32/00,B33Y10/00,B33Y70/00,B33Y80/00








专利摘要
一种基于液态金属的热控柔性机器人的制备方法,先将EcoflexA胶和B胶混合均匀;然后取低熔点液态金属放入混合后的ecoflex胶中快速搅拌,混合均匀后,再取低沸点液体加入其中搅拌,直到低沸点液体完全混入其中,最后通过3D打印技术打印成相应形状,即得到柔性可膨胀材料,柔性可膨胀材料驱动部位内设有电热丝,之后将电热丝两端连接上加热电源,将其他部位用Ecoflex胶封装成需要的形状,即得到热控柔性机器人;启动加热开关,热控柔性机器人驱动部位加热膨胀从而产生变形和运动,停止加热,热控柔性机器人快速恢复成原来形状,本发明可以制备出集形状易于设计、可无线远程加热,驱动简单、载物方便等优点于一体的柔性机器人。
权利要求
1.一种基于液态金属的热控柔性机器人的制备方法,其特征在于,包括以下步骤;
A、分别取相同质量的Ecoflex A胶和B胶混合均匀;
B、取低熔点液态金属放入混合后的ecoflex胶中1000r/min快速搅拌3分钟,低熔点液态金属和ecoflex胶的质量比为1:1~10:1;
C、混合均匀后,再取低沸点液体加入其中搅拌2分钟,低沸点液体和步骤B制备的混合物的质量比为1:10,直到低沸点液体完全混入其中,低沸点液体为酒精、异戊烷、四氢呋喃或水;
D、通过3D打印技术将步骤C制备的材料打印成相应形状,即得到柔性可膨胀材料,柔性可膨胀材料驱动部位内设有电热丝,之后将电热丝两端连接上加热电源,将其他部位用Ecoflex A胶和B胶封装成需要的形状,即得到热控柔性机器人;启动加热开关,热控柔性机器人驱动部位加热膨胀从而产生变形和运动,停止加热,热控柔性机器人快速恢复成原来形状。
2.根据权利要求1所述的一种基于液态金属的热控柔性机器人的制备方法,其特征在于:所述的低熔点液态金属为镓基合金、铟基合金或铋基合金。
3.根据权利要求1所述的一种基于液态金属的热控柔性机器人的制备方法,其特征在于:所述的低熔点液态金属为镓铟合金,其中75.5%的镓和24.5%的铟,该合金的熔点为10.5度,在常温下保持液态。
4.根据权利要求1所述的一种基于液态金属的热控柔性机器人的制备方法,其特征在于:所述的电热丝选用镍铬合金丝材料。
5.根据权利要求1所述的一种基于液态金属的热控柔性机器人的制备方法,其特征在于:所述的加热电源为可拆卸的电池,包括纽扣电池或锂离子电池。
说明书
技术领域
本发明属于柔性机器人技术领域,具体涉及一种基于液态金属的3D打印柔性机器人的制备方法。
背景技术
传统刚性机器人通过电机或液压驱动刚性部件移动,但是由于刚性机器人结构复杂,刚性部件的连接不稳定,以及活动自由度的限制,在复杂地形和环境中的活动仍不够理想。近年来,随着材料技术的发展,柔性机器人的研制取得了巨大的发展,其中以气动柔性机器人的研究最为成熟。目前的气动柔性机器人可以在复杂环境中进行多自由度的运动,而且由于结构简单,具有更好的稳定性。
气动柔性机器人需要外加气泵为气囊提供驱动力,这在一定程度上限制了柔性机器人的活动能力和变形能力。目前有研究将低沸点液体混合到硅胶材料中,在外加热场的作用下,使低沸点液体气化,进而在硅胶材料中产生大量气泡,使得硅胶材料膨胀变形,从而产生驱动力。这种方法不需要外加气泵装置,只需要通过内置的电热丝加热即可,因而减小了机器人的体积和能量损耗,具有更好的灵活性。
虽然新出现的方法具有明显的优势,但是也存在一些不足,首先是无法对其进行无线远程加热,只能通过电流直接加热。另外热导率和弹性模量这两种影响膨胀变形效果的主要因素有待进一步提高。
发明内容
为了克服上述现有技术的缺点,本发明的目的在于提供了一种基于液态金属(liquid metal,LM)的3D打印柔性机器人的制备方法,可以制备出集形状易于设计、可无线远程加热,驱动简单、载物方便等优点于一体的柔性机器人。
为了达到上述目的,本发明采取的技术方案为:
一种基于液态金属的热控柔性机器人的制备方法,包括以下步骤;
A、分别取相同质量的EcoflexA胶和B胶混合均匀;
B、取低熔点液态金属放入混合后的ecoflex胶中1000r/min快速搅拌3分钟,低熔点液态金属和ecoflex胶的质量比为1:1~10:1;
C、混合均匀后,再取低沸点液体加入其中搅拌2分钟,低沸点液体和步骤B制备的混合物的质量比为1:10,直到低沸点液体完全混入其中,低沸点液体为酒精、异戊烷、四氢呋喃或水;
D、通过3D打印技术将步骤C制备的材料打印成相应形状,即得到柔性可膨胀材料,柔性可膨胀材料驱动部位内设有电热丝,之后将电热丝两端连接上加热电源,将其他部位用Ecoflex A胶和B胶封装成需要的形状,即得到热控柔性机器人;启动加热开关,热控柔性机器人驱动部位加热膨胀从而产生变形和运动,停止加热,热控柔性机器人快速恢复成原来形状。
所述的低熔点液态金属为镓基合金、铟基合金或铋基合金。
所述的低熔点液态金属为镓铟合金,其中75.5%的镓和24.5%的铟,该合金的熔点为10.5度,在常温下保持液态。
所述的电热丝选用镍铬合金丝材料。
所述的加热电源为可拆卸的电池,包括纽扣电池或锂离子电池。
本发明的有益效果为:
本发明制备的柔性可膨胀材料,由于含有大量的低熔点液态金属,不仅可以通过电流直接加热,也可以通过微波无线加热,也可以通过线圈电磁感应加热实现膨胀变形效果。
本发明采用低熔点液态金属是一类熔点较低的合金,这种合金材料具有良好的导热性,因而可以参杂在硅胶材料中,提高硅胶材料的导热性,从而加速膨胀过程。此外低熔点液态金属的流动性也不会对硅胶材料的变形能力造成影响,可以随着硅胶材料的变形而一起变形。
本发明柔性可膨胀材料混合了液态金属微球和低沸点液体,在电热丝的加热下或者微波以及电磁波远程加热下可以膨胀变形,产生驱动力。此外,这种柔性可膨胀材料可以通过3D打印制备出不同形状的柔性机器人。柔性机器人不仅可以通过热源控制运动,而且还可以大幅度的变形以适应复杂环境的需要,该机器人具有良好的柔性和可拉伸性。未来可以制备出集形状易于设计,驱动简单,载物方便等优点于一体的柔性机器人,具有广阔的应用前景。
附图说明
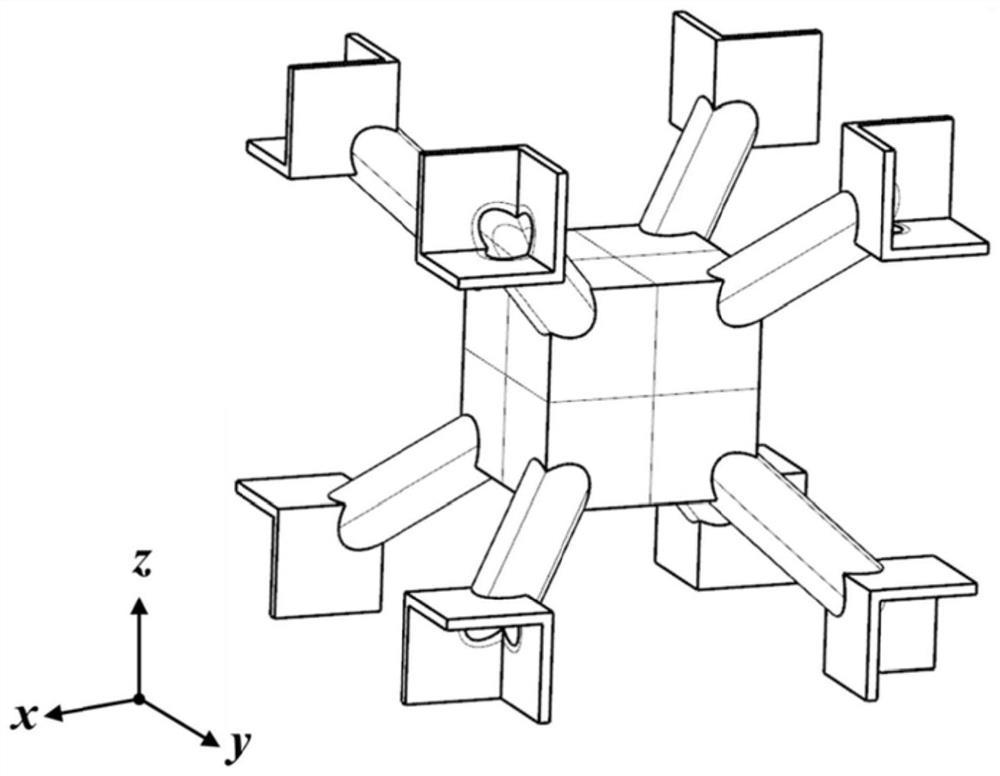
图1是实施例1制备的柔性机器手的示意图。
图2为实施例1制仿生蠕动柔性机器人的示意图。
图3为实施例1的导热性能图。
图4为实施例1的弹性模量图。
具体实施方式
下面结合实施例和附图对本发明做进一步说明。
实施例1,一种基于液态金属的热控柔性机器人的制备方法,包括以下步骤;
A、分别取相同质量的EcoflexA胶和B胶混合均匀;
B、取低熔点液态金属放入混合后的ecoflex胶中以转速1000转每分钟搅拌3分钟,低熔点液态金属和ecoflex胶的质量比为2:1,所述的低熔点液态金属为镓铟合金,其中75.5%的镓和24.5%的铟;
C、混合均匀后,再取低沸点液体加入其中搅拌2分钟,低沸点液体和步骤B制备的混合物的质量比为1:10,低沸点液体为酒精;
D、通过3D打印技术将步骤C制备的材料打印成相应形状,即得到柔性可膨胀材料,柔性可膨胀材料驱动部位内设有电热丝,之后将电热丝两端连接上加热电源,将其他部位用Ecoflex A胶和B胶封装成需要的形状,即得到热控柔性机器人;启动加热开关,热控柔性机器人驱动部位加热膨胀从而产生变形和运动,停止加热,热控柔性机器人快速恢复成原来形状。
如打印成柔性机器手,如图1所示,四根触手201由此柔性材料制备而成,可以随温度响应而弯曲,当开启加热时,四根柔性触手201同时一侧受热膨胀而弯曲202,可以抓住物体203,将物体203运输到指定位置后,停止加热,柔性触手201慢慢放松,恢复成原来形状,将物体203放下。
如打印成仿生蠕动柔性机器人,如图2所示,在可膨胀柔性材料301内部局部镶嵌加热丝302,非加热部位直接用漆包线303连接,当开启加热开关时,加热丝302附近受热使得机器人特定关节303膨胀,停止加热会收缩回原始形状,重复的舒张和收缩可以作为蠕动前进的动力。
参照图3,由于加入了液态金属,本实施例材料的导热性显著增强,可以使得加热温度快速变化,有利于机器人的变形和运动。
参照图4,由于加入了液态金属,本实施例材料的弹性模量也显著下降,柔性增强,因此在相同的压力下,更易产生变形和运动。数据如下图。
实施例2,一种基于液态金属的热控柔性机器人的制备方法,包括以下步骤;
A、分别取相同质量的EcoflexA胶和B胶混合均匀;
B、取低熔点液态金属放入混合后的ecoflex胶中以转速1000转每分钟搅拌3分钟,低熔点液态金属和ecoflex胶的质量比为1:1,所述的低熔点液态金属为镓铟合金,其中75.5%的镓和24.5%的铟;
C、混合均匀后,再取低沸点液体加入其中搅拌2分钟,低沸点液体和步骤B制备的混合物的质量比为1:10,低沸点液体为异戊烷;
D、通过3D打印技术将步骤C制备的材料打印成相应形状,即得到柔性可膨胀材料,柔性可膨胀材料驱动部位内设有电热丝,之后将电热丝两端连接上加热电源,将其他部位用Ecoflex A胶和B胶封装成需要的形状,即得到热控柔性机器人;启动加热开关,热控柔性机器人驱动部位加热膨胀从而产生变形和运动,停止加热,热控柔性机器人快速恢复成原来形状。
实施例3,一种基于液态金属的热控柔性机器人的制备方法,包括以下步骤;
A、分别取相同质量的EcoflexA胶和B胶混合均匀;
B、取低熔点液态金属放入混合后的ecoflex胶中以转速1000转每分钟搅拌3分钟,低熔点液态金属和ecoflex胶的质量比为10:1,所述的低熔点液态金属为镓铟合金,其中75.5%的镓和24.5%的铟;
C、混合均匀后,再取低沸点液体加入其中搅拌2分钟,低沸点液体和步骤B制备的混合物的质量比为1:10,低沸点液体为四氢呋喃;
D、通过3D打印技术将步骤C制备的材料打印成相应形状,即得到柔性可膨胀材料,柔性可膨胀材料驱动部位内设有电热丝,之后将电热丝两端连接上加热电源,将其他部位用Ecoflex A胶和B胶封装成需要的形状,即得到热控柔性机器人;启动加热开关,热控柔性机器人驱动部位加热膨胀从而产生变形和运动,停止加热,热控柔性机器人快速恢复成原来形状。
实施例4,一种基于液态金属的热控柔性机器人的制备方法,包括以下步骤;
A、分别取相同质量的EcoflexA胶和B胶混合均匀;
B、取低熔点液态金属放入混合后的ecoflex胶中以转速1000转每分钟搅拌3分钟,低熔点液态金属和ecoflex胶的质量比为5:1,所述的低熔点液态金属为镓铟合金,其中75.5%的镓和24.5%的铟;
C、混合均匀后,再取低沸点液体加入其中搅拌2分钟,低沸点液体和步骤B制备的混合物的质量比为1:10,低沸点液体为水;
D、通过3D打印技术将步骤C制备的材料打印成相应形状,即得到柔性可膨胀材料,柔性可膨胀材料驱动部位内设有电热丝,之后将电热丝两端连接上加热电源,将其他部位用Ecoflex A胶和B胶封装成需要的形状,即得到热控柔性机器人;启动加热开关,热控柔性机器人驱动部位加热膨胀从而产生变形和运动,停止加热,热控柔性机器人快速恢复成原来形状。
实施例5,一种基于液态金属的热控柔性机器人的制备方法,包括以下步骤;
A、分别取相同质量的EcoflexA胶和B胶混合均匀;
B、取低熔点液态金属放入混合后的ecoflex胶中以转速1000转每分钟搅拌3分钟,低熔点液态金属和ecoflex胶的质量比为8:1,所述的低熔点液态金属为镓铟合金,其中75.5%的镓和24.5%的铟;
C、混合均匀后,再取低沸点液体加入其中搅拌2分钟,低沸点液体和步骤B制备的混合物的质量比为1:10,低沸点液体为酒精;
D、通过3D打印技术将步骤C制备的材料打印成相应形状,即得到柔性可膨胀材料,柔性可膨胀材料驱动部位内设有电热丝,之后将电热丝两端连接上加热电源,将其他部位用Ecoflex A胶和B胶封装成需要的形状,即得到热控柔性机器人;启动加热开关,热控柔性机器人驱动部位加热膨胀从而产生变形和运动,停止加热,热控柔性机器人快速恢复成原来形状。
一种基于液态金属的3D打印柔性机器人的制备方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0