










专利摘要
本发明公开了一种基于天基激光平台驱动的空间目标变轨计算方法及其装置,该方法包括以下步骤:步骤S100:获取空间目标的更新位置矢量;步骤S200:根据激光烧蚀冲量和空间目标质量,得到激光烧蚀速度增量;步骤S300:根据初始速度矢量和激光烧蚀速度增量,获得空间目标的驱动速度矢量,根据驱动速度矢量和空间目标的初始位置矢量,得到激光驱动后空间目标的轨道参数。该方法能分析天基激光驱动空间目标的轨道变化效果,能够对激光驱动力对在轨目标产生的变轨效果进行计算。
权利要求
1.一种基于天基激光平台驱动的空间目标变轨计算方法,其特征在于,包括以下步骤:
步骤S100:分别获取初始时刻空间目标和所述天基激光平台的初始位置矢量和初始速度矢量,启动所述天基激光平台驱动所述空间目标,获取所述空间目标的更新位置矢量;
步骤S200:由所述空间目标的更新位置矢量和所述天基激光平台的初始位置矢量,得到激光烧蚀冲量方向,根据所述天基激光平台输出激光能量、所述空间目标材料的冲量耦合系数得到激光烧蚀冲量,根据所述激光烧蚀冲量和所述空间目标质量,得到激光烧蚀速度增量;
步骤S300:根据所述初始速度矢量和所述激光烧蚀速度增量,获得所述空间目标的驱动速度矢量,根据所述驱动速度矢量和所述空间目标的所述初始位置矢量,得到激光驱动后所述空间目标的轨道参数。
2.根据权利要求1所述的基于天基激光平台驱动的空间目标变轨计算方法,其特征在于,所述天基激光平台与所述空间目标之间的距离不超过50km。
3.根据权利要求1所述的基于天基激光平台驱动的空间目标变轨计算方法,其特征在于,所述天基激光平台产生单脉冲或多次脉冲。
4.根据权利要求1~3中任一项所述的基于天基激光平台驱动的空间目标变轨计算方法,其特征在于,所述基于天基激光平台驱动的空间目标变轨计算方法还包括以下步骤:步骤S400:判断变轨后的轨道参数是否满足预定轨道参数,如果满足则结束,如果不满足,则调整所述天基激光平台输出激光的驱动力值和所述速度增量方向,重复步骤S100~300。
5.根据权利要求1所述的基于天基激光平台驱动的空间目标变轨计算方法,其特征在于,根据初始时刻所述天基激光平台和所述空间目标所处轨道信息计算所述初始位置矢量和所述初始速度矢量。
6.根据权利要求1所述的基于天基激光平台驱动的空间目标变轨计算方法,其特征在于,所述空间目标的尺寸为1~10cm。
7.根据权利要求1所述的基于天基激光平台驱动的空间目标变轨计算方法,其特征在于,所述天基激光平台产生的激光脉宽为1纳秒至10纳秒,激光功率密度不小于10
8.一种基于天基激光平台驱动的空间目标变轨计算装置,其特征在于,包括:
启动测算模块,用于分别获取初始时刻空间目标和所述天基激光平台的初始位置矢量和初始速度矢量,启动所述天基激光平台驱动所述空间目标,获取所述空间目标的更新位置矢量;
激光烧蚀速度增量测算模块,用于由所述空间目标的更新位置矢量和所述天基激光平台的初始位置矢量,得到激光烧蚀冲量方向,根据所述天基激光平台输出激光能量、所述空间目标材料的冲量耦合系数得到激光烧蚀冲量,根据所述激光烧蚀冲量和所述空间目标质量,得到激光烧蚀速度增量;
更新轨道模块,用于根据所述初始速度矢量和所述激光烧蚀速度增量,获得所述空间目标的驱动速度矢量,根据所述驱动速度矢量和所述空间目标的所述初始位置矢量,得到激光驱动所述空间目标的轨道参数。
9.根据权利要求8所述的基于天基激光平台驱动的空间目标变轨计算装置,其特征在于,还包括控制模块,用于判断变轨后的轨道参数是否满足预定轨道参数,如果满足则结束,如果不满足,则调整所述天基激光平台输出激光的驱动力值和所述速度增量方向,返回所述启动测算模块。
10.根据权利要求8所述的基于天基激光平台驱动的空间目标变轨计算装置,其特征在于,初始测算模块,用于根据初始时刻所述天基激光平台和所述空间目标所处轨道信息计算所述初始位置矢量和所述初始速度矢量。
说明书
技术领域
本发明涉及一种基于天基激光平台驱动的空间目标变轨计算方法及其装置,属于空间目标激光操控领域。
背景技术
自1957年人类进人空间时代以来,频繁的航天活动产生了数量庞大的空间碎片,已经严重污染了空间环境,威胁着航天活动的安全。空间碎片主要是指人类在太空活动中遗留在空间中的废弃航天器残骸以及它们因碰撞或爆炸而产生的碎片。空间碎片主要分布在400~2000km的近地轨道(LEO)上,其中尺寸量级在1~10cm的小尺度空间碎片因无法被监测跟踪,并且能对LEO轨道空间目标产生致命的危害,是LEO区域最危险的空间碎片,以下也称空间目标。
目前在近地轨道上直径大于10cm,小于100cm的空间目标约有2200多个。直径大于1cm,小于10cm的空间目标数目约为10万个。
国内外提出的空间碎片主动移除方案主要有绳系拖拽法、捕获法和激光辐照法三类。激光辐照主动移除空间碎片技术因可同时进行探测和跟瞄,操作简单,响应时间短,可重复使用,且成本较低,是目前国内外移除小尺度空间碎片最有前景的方法,也是当前的研究重点。
天基激光清除技术是指,天基卫星平台搭载高能激光系统,通过激光远距离烧蚀目标产生烧蚀羽流喷射,根据动量守恒,使目标获得速度增量,从而减速降轨,最终进入大气层烧毁。
在随着激光器技术的不断发展,天基激光清除技术因其不受大气传输效应的影响,捕获跟踪灵活方便等优点成为清除空间碎片的一种新的解决途径。
激光驱动法利用高能脉冲激光烧蚀固体靶材产生冲量耦合效应,通过使用脉冲高功率激光辐照空间目标的表面,从而使得光斑区目标表面温度迅速升高,引起空间表面材质的熔化、气化。激光烧蚀产物进一步电离形成等离子体,等离子体迅速向外膨胀,从而对空间目标施加反冲冲量。在反冲冲量的作用下,空间目标的轨道参数发生变化。此种工作机制具有无污染、效率高等优点,应用前景广阔。
以激光烧蚀产生的推力实现空间在轨目标远距离非接触式驱动,但该驱动力作用于空间目标后,空间目标轨道可能产生的改变,无法准确测算。
发明内容
根据本申请的一个方面,提供了一种基于天基激光平台驱动的空间目标变轨计算方法,该方法可根据天基激光平台所处轨道和空间目标所处轨道,测算出经过天基激光平台驱动后,空间目标之后的轨道,从而为准确捕获空间目标提供条件。
所述基于天基激光平台驱动的空间目标变轨计算方法,包括以下步骤:
步骤S100:分别获取初始时刻空间目标和所述天基激光平台的初始位置矢量和初始速度矢量,启动所述天基激光平台驱动所述空间目标,获取所述空间目标的更新位置矢量;
步骤S200:由所述空间目标的更新位置矢量和所述天基激光平台的初始位置矢量,得到激光烧蚀冲量方向,根据所述天基激光平台输出激光能量、所述空间目标材料的冲量耦合系数得到激光烧蚀冲量,根据所述激光烧蚀冲量和所述空间目标质量,得到激光烧蚀速度增量;
步骤S300:根据所述初始速度矢量和所述激光烧蚀速度增量,获得所述空间目标的驱动速度矢量,根据所述驱动速度矢量和所述空间目标的所述初始位置矢量,得到激光驱动后所述空间目标的轨道参数。
可选的,所述天基激光平台与所述空间目标之间的距离不超过50km。
可选的,所述天基激光平台产生单脉冲或多次脉冲。
可选的,所述基于天基激光平台驱动的空间目标变轨计算方法还包括以下步骤:步骤S400:判断所述变轨后的轨道参数是否满足预定轨道参数,如果满足则结束,如果不满足,则调整所述天基激光平台输出激光的驱动力值和所述速度增量方向,重复步骤S100~300。
可选的,根据初始时刻所述天基激光平台和所述空间目标所处轨道信息计算所述初始位置矢量和所述初始速度矢量。
可选的,所述空间目标的尺寸为1~10cm。
可选的,所述天基激光平台产生的激光脉宽为1纳秒至100纳秒,激光功率密度不小于108W/cm
本发明的另一方面还提供了一种基于天基激光平台驱动的空间目标变轨计算装置,包括:
启动测算模块,用于分别获取初始时刻空间目标和所述天基激光平台的初始位置矢量和初始速度矢量,启动所述天基激光平台驱动所述空间目标,获取所述空间目标的更新位置矢量;
激光烧蚀速度增量测算模块,用于由所述空间目标的更新位置矢量和所述天基激光平台的初始位置矢量,得到激光烧蚀冲量方向,根据所述天基激光平台输出激光能量、所述空间目标材料的冲量耦合系数得到激光烧蚀冲量,根据所述激光烧蚀冲量和所述空间目标质量,得到激光烧蚀速度增量;
更新轨道模块,用于根据所述初始速度矢量和所述激光烧蚀速度增量,获得所述空间目标的驱动速度矢量,根据所述驱动速度矢量和所述空间目标的所述初始位置矢量,得到激光驱动所述空间目标的轨道参数。
可选的,还包括控制模块,用于判断所述变轨后的轨道参数是否满足预定轨道参数,如果满足则结束,如果不满足,则调整所述天基激光平台输出激光的驱动力值和所述速度增量方向,返回所述启动测算模块。
可选的,初始测算模块,用于根据初始时刻所述天基激光平台和所述空间目标所处轨道信息计算所述初始位置矢量和所述初始速度矢量。
本发明的有益效果包括但不限于:
(1)本发明所提供的基于天基激光平台驱动的空间目标变轨计算方法及其装置,该方法提供了一种激光驱动空间目标变轨分析方法,能分析天基激光驱动空间目标的轨道变化结果,激光驱动力作用于在轨目标后,该方法能够计算在轨目标变轨后的轨道结果。
(2)本发明所提供的基于天基激光平台驱动的空间目标变轨计算方法及其装置,能够为进一步设计天基激光载荷参数提供依据。
(3)本发明所提供的基于天基激光平台驱动的空间目标变轨计算方法及其装置,通过对空间目标受力情况进行分析,根据空间目标变轨后所处轨道进行分析,根据所得轨道情况,对空间目标进行控制,以使其能根据指令进入预定轨道完成回收或捕获。
附图说明
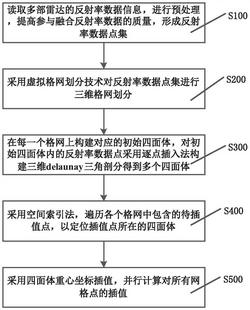
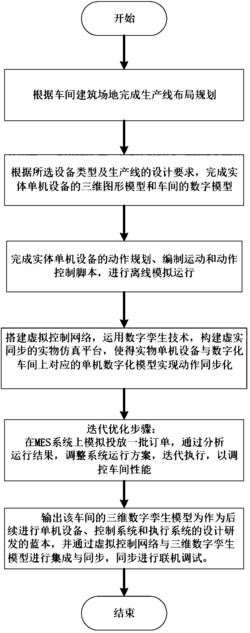
图1是本发明所提供的基于天基激光平台驱动的空间目标变轨计算方法流程示意框图;
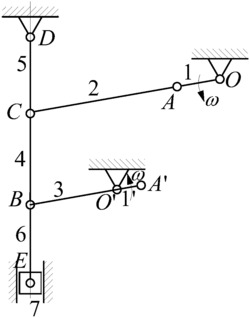
图2是本发明优选实施例中空间目标异面变轨初始状态示意图;
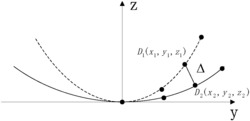
图3是轨道坐标系及变轨后空间目标轨道示意图;
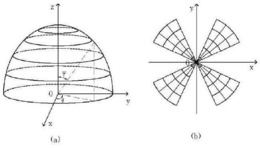
图4是本发明优选实施例中激光驱动空间目标速度增量示意图。
图例说明:
具体实施方式
下面结合实施例详述本发明,但本发明并不局限于这些实施例。
参见图1,本发明提供的基于天基激光平台驱动的空间目标变轨计算方法,包括以下步骤:
步骤S100:分别获取初始时刻空间目标和所述天基激光平台的初始位置矢量和初始速度矢量,启动所述天基激光平台驱动所述空间目标,获取所述空间目标的更新位置矢量;
未开启天基激光平台时,空间目标和天基激光平台处于地心惯性坐标系下,本文所建立地心惯性坐标系为OE-XIYIZI,原点位于地心OE,OEXI轴指向平春分点,OEZI垂直于赤道平面,与地球自转轴重合且指向北极,OEYI轴位于赤道平面内,方向满足右手直角坐标系准则。
空间目标沿某一轨道飞行,其轨道根数为σ1=(a1,e1,i1,Ω1,ω1,M01),其中,a1为空间目标轨道半长轴,e1为空间目标轨道偏心率,i1为空间目标轨道倾角,Ω1为空间目标轨道升交点赤经,ω1为空间目标近地点幅角,M01为空间目标平近点角。天基激光平台沿另一轨道飞行,其轨道根数为σ2=(a2,e2,i2,Ω2,ω2,M02)。其中,a2为天基激光平台轨道半长轴,e2为天基激光平台轨道偏心率,i2为天基激光平台轨道倾角,Ω2为天基激光平台轨道升交点赤经,ω2为天基激光平台近地点幅角,M02为天基激光平台平近点角。由轨道相关参数得到惯性系下初始时刻天基激光平台和空间目标的初始速度矢量和初始位置矢量。
步骤S200:由所述空间目标的更新位置矢量和所述天基激光平台的初始位置矢量,得到激光烧蚀冲量方向,根据所述天基激光平台输出激光能量、所述空间目标材料的冲量耦合系数得到激光烧蚀冲量,根据所述激光烧蚀冲量和所述空间目标质量,得到激光烧蚀速度增量;
建立轨道坐标系O1-xvyvzv,原点O1位于空间目标质心,O1xv轴沿空间目标位置矢量方向,O1yv轴垂直于O1xv轴,通过满足右手直角坐标系准则确定方向,O1zv轴垂直于xvO1yv平面,方向由O1xv,O1yv轴右手螺旋定则确定。根据建立的坐标系,天基激光平台质点指向空间目标质点的方向即为激光烧蚀冲量方向。
所述天基激光平台输出激光能量乘以所述空间目标材料的冲量耦合系数,得到激光烧蚀冲量大小;所述激光烧蚀冲量大小除以所述空间目标的质量,即得到所述空间目标激光驱动获得的速度增量。
步骤S300:根据所述初始速度矢量和所述激光烧蚀速度增量,获得所述空间目标的驱动速度矢量,根据所述驱动速度矢量和所述空间目标的所述初始位置矢量,得到激光驱动后所述空间目标的轨道参数。
已知空间目标变轨后径向,轴向,垂向三个方向的速度增量,从而得到在轨道坐标系下,空间目标激光驱动变轨后三个方向的速度矢量。
由于忽略激光作用瞬间空间目标的飞行运动,变轨前后空间目标的位置矢量不变,同时已知变轨时刻,可唯一确定激光辐照驱动后空间目标的运动轨道。
显然的,空间目标惯性系下的速度矢量和激光驱动空间目标获得的惯性系下速度增量需要变化为空间目标轨道坐标系下的速度矢量和轨道坐标系下的速度增量矢量;为求解激光驱动空间目标后的轨道参数,需要将激光驱动空间目标后其在轨道坐标系下的速度矢量转化为惯性坐标系下的速度矢量。
所施加激光脉冲的次数由所驱动空间目标决定。当单次脉冲激光驱动效果不能达到空间目标轨道变化要求时,需要施加多次脉冲激光驱动。多脉冲激光驱动空间目标时,天基激光平台与空间目标之间的距离不超过50km。
通过该方法可以准确的获取天基激光平台驱动空间目标后,空间目标变轨后的准确轨道信息,为后续分析控制空间目标提供依据。
优选的,还包括以下步骤:步骤S400:判断所述变轨后的轨道参数是否满足预定轨道参数,如果满足则结束,如果不满足,则调整所述天基激光平台输出激光的驱动力值和所述速度增量方向,重复步骤S100~300。
通过该步骤,可以利用所得变轨后轨道参数,对空间目标进行准确控制和调整。控制所用参数的比对,可按现有方法进行。
优选的,所述初始位置矢量和所述初始速度矢量,根据初始时刻所述天基激光平台和所述空间目标所处轨道获得。
优选的,所述空间目标的尺寸为1~10cm。本文中尺寸是指空间目标任一截面上最远两点间的距离。截面可以为横截面或纵截面均可。
优选的,为获得高效的驱动效果,所述天基激光平台产生的激光脉宽为1纳秒至10纳秒,激光功率密度不小于10
本发明的另一方面还提供了一种基于天基激光平台驱动的空间目标变轨计算装置,包括:
启动测算模块,用于分别获取初始时刻空间目标和所述天基激光平台的初始位置矢量和初始速度矢量,启动所述天基激光平台驱动所述空间目标,获取所述空间目标的更新位置矢量;
激光烧蚀速度增量测算模块,用于由所述空间目标的更新位置矢量和所述天基激光平台的初始位置矢量,得到激光烧蚀冲量方向,根据所述天基激光平台输出激光能量、所述空间目标材料的冲量耦合系数得到激光烧蚀冲量,根据所述激光烧蚀冲量和所述空间目标质量,得到激光烧蚀速度增量;
更新轨道模块,用于根据所述初始速度矢量和所述激光烧蚀速度增量,获得所述空间目标的驱动速度矢量,根据所述驱动速度矢量和所述空间目标的所述初始位置矢量,得到激光驱动所述空间目标的轨道参数。
可选的,还包括控制模块,用于判断所述变轨后的轨道参数是否满足预定轨道参数,如果满足则结束,如果不满足,则调整所述天基激光平台输出激光的驱动力值和所述速度增量方向,返回所述启动测算模块。
可选的,初始测算模块,用于根据初始时刻所述天基激光平台和所述空间目标所处轨道信息计算所述初始位置矢量和所述初始速度矢量。
本发明具体方法包括以下步骤:
1、变轨前参数
建立地心惯性坐标系OE-XIYIZI,原点位于地心OE,OEXI轴指向平春分点,OEZI垂直于赤道平面,与地球自转轴重合且指向北极,OEYI轴位于赤道平面内,方向满足右手直角坐标系准则,如图2所示
在激光驱动作用前,空间目标沿轨道1飞行,其轨道根数为σ1=(a1,e1,i1,Ω1,ω1,M01),天基激光平台沿轨道2飞行,其轨道根数为σ2=(a2,e2,i2,Ω2,ω2,M02)。
已知开普勒方程、偏近点角与真近点角关系为:
其中,E为轨道偏近点角,e为轨道偏心率,M0为轨道平近点角,θ为轨道真近点角。
由式(1)可分别计算得到空间目标与天基激光平台在t0时刻的偏近点角E1、E2与真近点角θ1、θ2,且该时刻空间目标位于点A,天基激光平台位于点B。
由式(2)分别计算得到空间目标与天基激光平台的升交点角距u1,u2;空间目标与天基激光平台的位置矢量大小r1,r2。
其中,u为空间目标(下标1表示)或天基激光平台(下标2表示)轨道的升交点角距,ω为轨道的近地点幅角,a为轨道的半长轴,e为轨道的轨道偏心率。根据所需计算升交点角距和位置矢量的对象不同,所用参数为该对象对应参数。例如升交点角距u1=ω1+θ1,其中,ω1为空间目标轨道的近地点幅角,θ1为空间目标轨道的真近点角。
由式(3)分别计算得到空间目标与天基激光平台位置矢量r1=(x1,y1,z1),r2=(x2,y2,z2)。
其中,x为轨道在惯性系下x轴方向的值,y为轨道在惯性系下y轴方向的值,z为轨道在惯性系下z轴方向的值。
其中,ξ,η如式(4),lA,lB,mA,mB,nA,nB如式(5)
由式(6)分别计算得到空间目标与天基激光平台的单位质量动量矩h1,h2。
其中,μ为引力常数,数值为3.986×10
由式(7)分别计算得到空间目标与天基激光平台的飞行速度v1,v2。
其中,r为轨道距离地心的矢径。
由式(8)分别计算得到空间目标与天基激光平台速度矢量v1=(vx1,vy1,vz1),v2=(vx2,vy2,vz2)。
其中,h为空间目标或天基激光平台的单位质量动量矩。
2、激光驱动空间目标速度变化计算
建立轨道坐标系O1-xvyvzv,原点O1位于空间目标质心,O1xv轴沿空间目标位置矢量方向,O1yv轴垂直于O1xv轴,通过满足右手直角坐标系准则确定方向,O1zv轴垂直于xvO1yv平面,方向由O1xv,O1yv轴右手螺旋定则确定,如图3所示。被驱动后的空间目标在轨道3上运行。
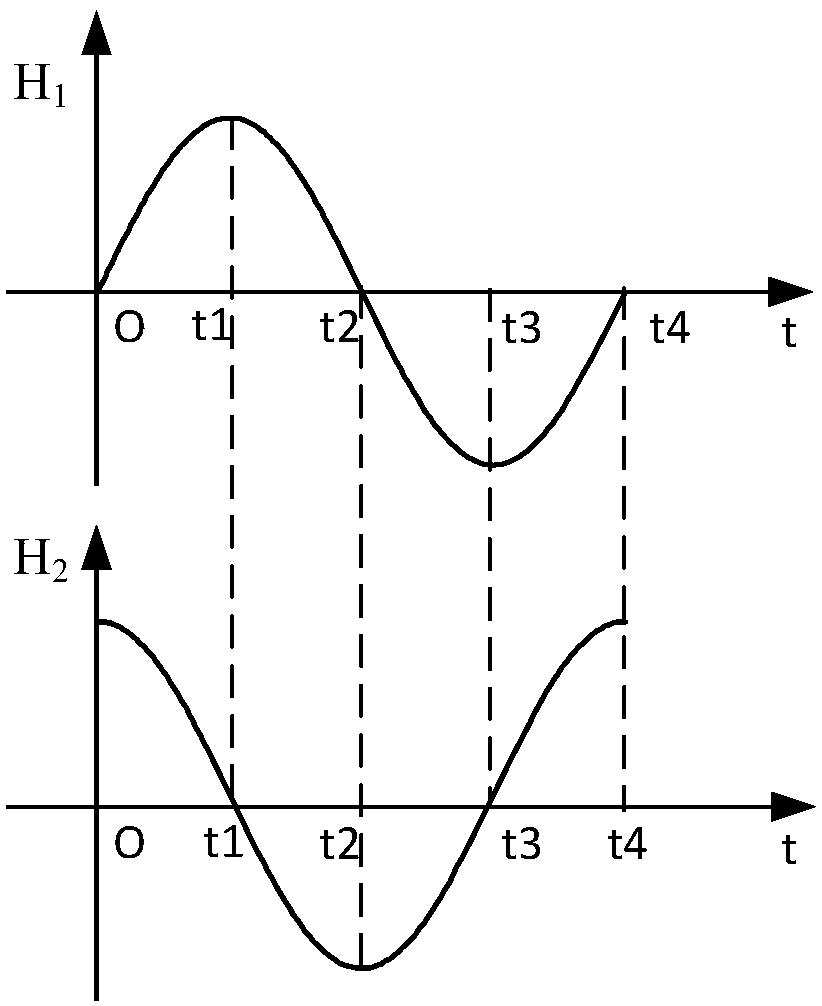
由激光驱动而产生的速度增量如图4所示。
由式(9)得空间目标轨道平面法向量:
其中,h1为空间目标单位质量动量矩,r1为空间目标位置矢量,v1为空间目标速度矢量,i为惯性系下的径向分量,j为惯性系下的轴向分量,k为惯性系下的垂向分量,vx1为惯性系下空间目标速度在径向方向分量,vy1为惯性系下空间目标速度在轴向方向分量,vz1为惯性系下空间目标速度在垂向方向分量,x1为惯性系下空间目标矢径在径向方向分量,y1为惯性系下空间目标矢径在轴向方向分量,z1为惯性系下空间目标矢径在垂向方向分量。
在图4中所示的ΔOEAB中,速度增量方向可由向量BA的方向决定,则由式(10)得速度增量矢量方向(取单位矢量)为
由式(11)得速度增量与空间目标轨道平面夹角为:
在ΔOEAB中,空间目标与天基激光平台位置矢量夹角ξ0为:
由图4所示几何关系,可得:
其中r1为空间目标在惯性系下的矢径的模,r2为天基激光平台在惯性系下的矢径的模,rAB为空间目标与天基激光平台在惯性系下的距离,ξr为天基激光平台施加给空间目标的速度增量方向与空间目标矢径之间的夹角。
天基激光平台施加给空间目标的速度增量与空间目标速度方向夹角为
其中,v1为空间目标飞行速度。
将速度增量分解到空间目标轨道平面与其垂面内,如式(15)
其中,ξa为天基激光平台施加给空间目标的速度增量方向与空间目标轨道平面的夹角,Δv为天基激光平台施加给空间目标的速度增量,Δv0为速度增量方向投影到空间目标轨道平面内的大小,Δv⊥为速度增量方向投影到垂直于空间目标轨道平面内的大小。
3、空间目标变轨后参数
由图4所示,地心惯性坐标系到轨道坐标系的方向余弦阵P为:
空间目标速度矢量在轨道坐标系中的坐标为:
其中,Vx3为空间目标在轨道坐标系下径向方向的速度大小,Vy3为空间目标在轨道坐标系下轴向方向的速度大小,Vz3为空间目标在轨道坐标系下垂向方向的速度大小,vx1为空间目标在惯性系下径向方向的速度大小,vy1为空间目标在惯性系下轴向方向的速度大小,vz1为空间目标在惯性系下垂向方向的速度大小,V3为空间目标在轨道坐标系下的速度矢量。
天基激光平台施加给空间目标的速度增量Δv在轨道坐标系下三个方向上的分量为:
其中,Δvx为激光作用空间目标在轨道坐标系径向方向的速度大小,Δvy为激光作用空间目标在轨道坐标系轴向方向的速度大小,Δvz为激光作用空间目标在轨道坐标系垂向方向的速度大小,Δv为空间目标在天基激光平台作用下获得的速度增量大小。由此可得到在轨道坐标系下空间目标激光辐照变轨后三个方向的速度矢量v3=(Vx3+Δvx,Vy3+Δvy,Vz3+Δvz),同时忽略激光作用瞬间,空间目标的飞行运动,变轨前后目标的位置矢量不变即r3=r1=(x1,y1,z1),其中,x1,y1,z1分别表示空间目标位置矢量在惯性系下径向,轴向,垂向三个方向的分量。同时已知变轨时刻t0,可唯一确定激光辐照后空间目标的运动轨道。速度矢量v3为小写字母,表示的是激光作用后的速度在轨道坐标系下的值。
将空间目标变轨后的速度矢量转换到地心惯性系中得:
其中,v3为变轨后空间目标在惯性系下的速度矢量,vx3,vy3,vz3分别表示变轨后空间目标在惯性系下径向,轴向,垂向三个方向的速度大小。
计算变轨后空间目标轨道参数:
(1)轨道半长轴
空间目标矢径为:
r3=r1 (20)
其中,r3=r1=(x1,y1,z1)。
运动速度V与轨道半长轴a3分别为:
(2)偏心率与轨道倾角
变轨后空间目标单位质量动量矩h3为:
其中,x3为变轨后空间目标在惯性系下径向的大小,y3为变轨后空间目标在惯性系下轴向的大小,z3为变轨后空间目标在惯性系下垂向的大小,i为惯性系下的径向分量,j为惯性系下的轴向分量,k为惯性系下的垂向分量,vx3为变轨后空间目标速度在惯性系下径向大小,vy3为变轨后空间目标速度在惯性系下轴向大小,vz3为变轨后空间目标速度在惯性系下垂向大小,hx3为变轨后空间目标单位质量动量矩在惯性系下径向大小,hy3为变轨后空间目标单位质量动量矩在惯性系下轴向大小,hz3为变轨后空间目标单位质量动量矩在惯性系下垂向大小。
两边取模得:
则空间目标偏心率e3与轨道倾角i3为
其中,h3为变轨后空间目标单位质量动量矩大小,a3为变轨后空间目标轨道半长轴,e3为变轨后空间目标轨道偏心率,i3为变轨后空间目标轨道倾角。
(3)升交点赤经
定义变轨后空间目标轨道升交点矢量n为:
其中,hx3为变轨后空间目标单位质量动量矩在惯性系下径向大小,hy3为变轨后空间目标单位质量动量矩在惯性系下轴向大小,hz3为变轨后空间目标单位质量动量矩在惯性系下垂向大小。
则变轨后空间目标轨道升交点赤经Ω3为
(4)近地点辐角
已知变轨后空间目标轨道升交点角距u3为升交点矢量与空间目标位置矢量的夹角,即:
其中,r1为空间目标变轨前惯性系下的位置矢量;n为变轨后空间目标轨道升交点矢量;
则变轨后空间目标近地点辐角ω3为
ω3=u3-f3 (28)
其中,u3为变轨后空间目标轨道升交点角距,f3为变轨后空间目标轨道真近点角。
(5)偏近点角
由式(29)得变轨后空间目标轨道偏近点角E3,即:
其中,r3表示的是r3的模。
(6)平近点角与真近点角
由式(30)得变轨后空间目标轨道平近点角M3和真近点角f3,即
下面结合实例对本发明提供的方法进行详细说明。
本实例中空间目标轨道根数和天基激光平台根数初始参数如表1所示,假设空间目标在激光作用下获得的速度增量为Δv=10m/s。
表1空间目标与天基激光平台初始轨道根数
下面结合表1中的参数,本发明提供方法的具体计算如下:
由式(1)计算空间目标在t0时刻的偏近点角E1和真近点角θ1,即
由式(1)计算天基激光平台在t0时刻的偏近点角E2和真近点角θ2,即
由式(2)计算得到空间目标的升交点角距u1,以及空间目标在惯性系下的位置矢量大小r1,即
由式(2)计算得到天基激光平台的升交点角距u2,以及天基激光平台在惯性系下的位置矢量大小r2,即
由式(3)、(4)和(5)可得空间目标位置矢量r1=(x1,y1,z1)和天基激光平台位置矢量r2=(x2,y2,z2),即
由式(6)分别计算得到空间目标与天基激光平台的单位质量动量矩大小h1,h2,即
由式(7)分别计算得到空间目标与天基激光平台的飞行速度v1,v2,即
由式(8)分别计算得到空间目标速度矢量v1=(vx1,vy1,vz1),以及天基激光平台速度矢量v2=(vx2,vy2,vz2)。
由式(9)得空间目标轨道平面法向量:
由式(10)得天基激光平台作用空间目标,使空间目标获得的速度增量矢量方向(取单位矢量)为
由式(11)得速度增量与空间目标轨道平面夹角为
由式(12)计算空间目标与天基激光平台位置矢量夹角ξ0
由图4所示几何关系,可得:
其中,r1为空间目标在惯性系下的矢径的模,r2为天基激光平台在惯性系下的矢径的模,rAB为空间目标与天基激光平台在惯性系下的距离,ξr为天基激光平台施加给空间目标的速度增量方向与空间目标矢径之间的夹角。
天基激光平台施加给空间目标的速度增量与空间目标速度方向夹角为
其中,v1为空间目标速度矢量。
通过式(15)将速度增量分解到空间目标轨道平面与其垂面内,可得到
其中,ξa为天基激光平台施加给空间目标的速度增量方向与空间目标轨道平面的夹角,Δv为天基激光平台施加给空间目标的速度增量,Δv0为速度增量方向投影到空间目标轨道平面内的大小,Δv⊥为速度增量方向投影到垂直于空间目标轨道平面内的大小。
由式(16)、(17)得到天基激光平台未作用空间目标时,空间目标速度矢量在轨道坐标系下径向Vx3、轴向Vy3、垂直方向Vz3的速度大小,即
由式(18)得到天基激光平台施加给空间目标的速度增量Δv在轨道坐标系下三个方向上的分量为:
已知天基激光平台作用空间目标在径向,轴向,垂向三个方向的速度增量,可得到在轨道坐标系下空间目标激光辐照变轨后三个方向的速度矢量v3=(Vx3+Δvx,Vy3+Δvy,Vz3+Δvz),同时忽略激光作用瞬间,空间目标的飞行运动,变轨前后目标的位置矢量不变即r3=r1=(x1,y1,z1),其中,x1,y1,z1分别表示空间目标位置矢量在惯性系下径向,轴向,垂向三个方向的分量。同时已知变轨时刻t0,可唯一确定激光辐照后空间目标的运动轨道。
将空间目标变轨后的速度矢量转换到地心惯性系中得
其中,v3为变轨后空间目标在惯性系下的速度矢量,vx3,vy3,vz3分别表示变轨后空间目标在惯性系下径向,轴向,垂向三个方向的速度大小。
由式(21)计算变轨后的半长轴a3
由式(22)、(23)、(24)计算变轨后的偏心率和轨道倾角。
变轨后空间目标单位质量动量矩h3为
两边取模得:
则空间目标偏心率e3与轨道倾角i3为
定义变轨后空间目标轨道升交点矢量n为:
由式(26)计算变轨后空间目标轨道升交点赤经Ω3为
由式(29)得变轨后空间目标轨道偏近点角E3,即:
其中,r3表示的是r3的模。
由式(30)得变轨后空间目标轨道平近点角M3和真近点角f3,即
已知变轨后空间目标轨道升交点角距u3为升交点矢量与空间目标位置矢量的夹角,即:
则变轨后空间目标近地点辐角ω3为
ω3=u3-f3
其中,u3为变轨后空间目标轨道升交点角距,f3为变轨后空间目标轨道真近点角。
按照上述计算方法,得到变轨后空间目标轨道参数如表2所示。
表2空间目标变轨后轨道参数
由表2可见,本发明提供的方法能准确根据变轨前空间目标所处轨道参数和天基激光平台所处轨道参数,准确计算得出采用天基平台下对空间目标作用后,空间目标变轨后的轨道参数。
以上所述,仅是本发明的几个实施例,并非对本发明做任何形式的限制,虽然本发明以较佳实施例揭示如上,然而并非用以限制本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案的范围内,利用上述揭示的技术内容做出些许的变动或修饰均等同于等效实施案例,均属于技术方案范围内。
基于天基激光平台驱动的空间目标变轨计算方法及其装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0