







专利摘要
本发明公开了一种空间自主多目标物抓捕绳网系统和方法。包括可重组机构、遥控锁死机构、柔性三维绳网和收口机构。在捕获前,可重组结构的四个子机构处于相互嵌套的重组状态,柔性三维绳网处于折叠状态,压缩存储于各个收口机构之间,通过遥控锁死机构将可重组机构与收口机构压紧锁死;捕获开始时,可重组结构处于的子机构通过弹簧实现弹射分离,柔性三维绳网在惯性作用下展开成一空间三维网袋,各收口机构处于开口状态;捕获进行时,每抓捕一个目标物,每节绳网的收口结构就动作进入收口闭合状态,从而完成空间多目标物的抓捕。本发明具有容错性好、作业距离远及抓捕效率高等优点,且具有很强的复制性,可根据需要扩展至任意节绳网。
权利要求
1.一种空间自主多目标物抓捕绳网系统,其特征在于:
包括可重组机构(1)、遥控锁死机构(2)、柔性三维绳网(3)和收口机构(4);柔性三维绳网(3)主要由依次衔接布置的第一节绳网(3.1)、第二节绳网(3.2)、第三节绳网(3.3)、第四节绳网(3.4)组成,柔性三维绳网(3)的一端系在一起作为捕获末端,另一端连接到可重组机构(1)作为捕获入口端,相邻节绳网之间安装有收口机构(4),通过收口机构(4)隔离或者连通相邻节绳网内空间;
所述绳网系统收拢时,可重组机构(1)收拢且各个收口机构(4)紧靠布置,然后通过遥控锁死机构(2)将可重组机构(1)和各个收口机构(4)箍紧,使得柔性三维绳网(3)中间的每节绳网被收缚在相邻收口机构(4)之间,柔性三维绳网(3)捕获末端的一节绳网被收缚遥控锁死机构(2),柔性三维绳网(3)捕获入口端的一节绳网被收缚在可重组机构(1);所述绳网系统展开时,可重组机构(1)打开,各个收口机构(4)分离布置,遥控锁死机构(2)打开脱离可重组机构(1)和各个收口机构(4),使得柔性三维绳网(3)中间的每节绳网自由伸展在相邻收口机构(4)之间,柔性三维绳网(3)捕获末端的一节绳网自由伸展在遥控锁死机构(2)和收口机构(4)之间,柔性三维绳网(3) 捕获入口端的一节绳网自由伸展在可重组机构(1)和收口机构(4)之间;
所述的收口机构(4)包括矩形框(4.1)、收口锁(4.2)、两个横向收口组件和两个纵向收口组件,两个横向收口组件分别对称布置在矩形框(4.1)内圈边框其中相对的两边,两个纵向收口组件分别对称布置在矩形框(4.1)内圈边框另外相对的两边;横向收口组件包括横向弹簧(4.3)和横向收口杆(4.5),横向收口杆(4.5)通过纵向弹簧(4.4)连接到矩形框(4.1)内圈边框,横向收口杆(4.5)与矩形框(4.1)内圈边框外围通过收口锁(4.2)箍紧;纵向收口组件包括纵向弹簧(4.4)和纵向收口杆(4.6),纵向收口杆(4.6)通过横向弹簧(4.3)连接到矩形框(4.1)内圈边框,纵向收口杆(4.6)与矩形框(4.1)内圈边框外围通过收口锁(4.2)箍紧;
收口机构(4)收拢时,四个收口锁(4.2)分别将两个横向收口组件和两个纵向收口组件的四个收口杆箍紧固定在矩形框(4.1)内圈的四边边框上,弹簧被压缩在收口杆和矩形框(4.1)内圈边框之间,四组收口组件的四根收口杆均位于矩形框(4.1)的内圈,未形成对矩形框(4.1)中间空间的阻挡;收口机构(4)展开时,四个收口锁(4.2)打开脱离于矩形框(4.1)和收口组件,每个收口组件依靠弹簧作用力将收口杆分离于矩形框(4.1)内圈边框,移动到矩形框(4.1)中部,四组收口组件的四根收口杆均位于矩形框(4.1)中部形成对矩形框(4.1)中间空间的阻挡。
2.根据权利要求1所述的空间自主多目标物抓捕绳网系统,其特征在于:
所述的柔性三维绳网(3)的绳网穿设并系于收口机构(4)的矩形框(4.1)。
3.根据权利要求1所述的空间自主多目标物抓捕绳网系统,其特征在于:
所述的收口锁(4.2)主要由两个U形夹对接而成。
4.根据权利要求1所述的空间自主多目标物抓捕绳网系统,其特征在于:
所述的遥控锁死机构(2)通过无线进行开关控制。
5.根据权利要求1所述的空间自主多目标物抓捕绳网系统,其特征在于:
所述的可重组机构(1)主要由四个结构相同的重组子机构(a、b、c、d)构成,通过重组子机构的展开分离与靠拢对接实现第一节绳网的展开与收口。
6.根据权利要求5所述的空间自主多目标物抓捕绳网系统,其特征在于:所述的可重组机构(1)中,相邻两个重组子机构(a、b、c、d)之间连接有收口绳(1.21),所述的柔性三维绳网(3)捕获入口端的绳网端部连接到收口绳(1.21)。
7.应用于权利要求1-6任一所述绳网系统的空间自主多目标物抓捕方法,其特征在于:
1)在捕获前,可重组机构(1)处于重组收拢状态,柔性三维绳网(3)处于折叠收拢状态,柔性三维绳网(3)中间的每节绳网压缩存储于各个收口机构(4)之间,柔性三维绳网(3)捕获末端的一节绳网压缩存储于遥控锁死机构(2),柔性三维绳网(3)捕获入口端的一节绳网压缩存储于可重组机构(1),通过遥控锁死机构(2)将可重组机构(1)与各个收口机构(4)箍紧锁死;
2)捕获开始,遥控锁死机构(2)打开脱离可重组机构(1)和各个收口机构(4),可重组机构(1)分离展开,柔性三维绳网(3)自由展开成一空间三维网袋,各收口机构(4)处于开口连通状态;
3)捕获进行时,先从第四节绳网(3.4)捕获到第一个目标物后,最后的第四节绳网(3.4)入口处的收口机构(4)的收口锁(4.2)解锁打开,两根横向收口杆(4.5)在纵向弹簧(4.4)的弹力作用下分别向矩形框(4.1)的中部运动,两根纵向收口杆(4.6)在横向弹簧(4.3)的弹力作用下分别向矩形框(4.1)中部运动,使得收口机构(4)中间空间被四根收口杆阻挡,实现第四节绳网(3.4)的收口闭合;
4)捕获到下一个目标物后,第三节绳网(3.4)和第二节绳网(3.4)入口处的收口机构(4)依次均按照步骤3)相同方式实现绳网收口闭合,直至第一节绳网(3.4)捕获到最后一个目标物,接着可重组机构(1)对接重组,第一节绳网(3.1)入口处的收口闭合,完成空间自主多目标物抓捕。
说明书
技术领域
本发明涉及空间绳网抓捕系统,尤其是涉及一种可实现多目标物抓捕的空间自主绳网系统及方法。
背景技术
随着人类航天活动的增加,空间碎片环境日益恶化。为了保护宝贵的空间轨道资源,提高航天活动的安全性,需对空间碎片进行处理,捕获空间碎片并将其拖曳到其它废弃轨道是行之有效的方法。柔性捕获概念是近年提出的新型抓捕方式,以网或布等柔性结构覆盖、包裹目标物并通过柔性连接物(如绳索)与任务航天器形成可靠连接的组合体。作为柔性捕获方式的典型代表,空间绳网捕获系统具有抓捕容错性强、作业距离长及飞行器间耦合作用弱等优点,具有广阔的应用前景,是近年来空间研究的热点之一。传统的空间绳网抓捕系统,由于用于绳网展开的质量块一般不具有自主机动功能,因此对发射提出了较高的要求,捕获距离一般也较短,且一般一套绳网抓捕系统只能抓捕一个目标物,抓捕效率较低。
发明内容
以空间目标物捕获为背景,针对传统空间绳网抓捕系统存在的发射要求高、捕获距离短及抓捕效率低等问题,本发明的目的在于提供一种可实现多目标物抓捕的空间自主绳网系统和方法,采用具有弹射分离与对接组合功能的可重组机构,拖动空间多节绳网,通过可重组机构的子结构的编队构形变化并结合每节绳网的收口机构实现空间绳网的张口、保持与收口闭合等操作。
为了达到上述目的,本发明采用的技术方案是:
一、一种空间自主多目标物抓捕绳网系统:
包括可重组机构、遥控锁死机构、柔性三维绳网和收口机构;柔性三维绳网主要由依次衔接布置的第一节绳网、第二节绳网、第三节绳网、第四节绳网组成,柔性三维绳网的一端系在一起作为捕获末端,另一端连接到可重组机构作为捕获入口端,相邻节绳网之间安装有收口机构,通过收口机构隔离或者连通相邻节绳网内空间。
所述绳网系统收拢时,可重组机构收拢且各个收口机构紧靠布置,然后通过遥控锁死机构将可重组机构和各个收口机构箍紧,使得柔性三维绳网中间的每节绳网被收缚在相邻收口机构之间,柔性三维绳网捕获末端的一节绳网被收缚遥控锁死机构,柔性三维绳网捕获入口端的一节绳网被收缚在可重组机构;所述绳网系统展开时,可重组机构打开,各个收口机构分离布置,遥控锁死机构打开脱离可重组机构和各个收口机构,使得柔性三维绳网中间的每节绳网自由伸展在相邻收口机构之间,柔性三维绳网捕获末端的一节绳网自由伸展在遥控锁死机构和收口机构之间,柔性三维绳网 捕获入口端的一节绳网自由伸展在可重组机构和收口机构之间。
所述的收口机构包括矩形框、收口锁、两个横向收口组件和两个纵向收口组件,两个横向收口组件分别对称布置在矩形框内圈边框其中相对的两边,两个纵向收口组件分别对称布置在矩形框内圈边框另外相对的两边;横向收口组件包括横向弹簧和横向收口杆,横向收口杆通过纵向弹簧连接到矩形框内圈边框,横向收口杆与矩形框内圈边框外围通过收口锁箍紧;纵向收口组件包括纵向弹簧和纵向收口杆,纵向收口杆通过横向弹簧连接到矩形框内圈边框,纵向收口杆与矩形框内圈边框外围通过收口锁箍紧。
收口机构收拢时,四个收口锁分别将两个横向收口组件和两个纵向收口组件的四个收口杆箍紧固定在矩形框内圈的四边边框上,弹簧被压缩在收口杆和矩形框内圈边框之间,四组收口组件的四根收口杆均位于矩形框的内圈,未形成对矩形框中间空间的阻挡;收口机构展开时,四个收口锁打开脱离于矩形框和收口组件,每个收口组件依靠弹簧作用力将收口杆分离于矩形框内圈边框,移动到矩形框中部,四组收口组件的四根收口杆均位于矩形框中部形成对矩形框中间空间的阻挡。
所述的柔性三维绳网的绳网穿设并系于收口机构的矩形框。
所述的收口锁主要由两个U形夹对接而成。
所述的遥控锁死机构通过无线进行开关控制。
所述的可重组机构主要由四个结构相同的重组子机构构成,通过重组子机构的展开分离与靠拢对接实现第一节绳网的展开与收口。
所述的可重组机构中,相邻两个重组子机构之间连接有收口绳,所述的柔性三维绳网捕获入口端的绳网端部连接到收口绳。
所述绳网系统收拢时,可重组机构收拢且各个收口机构紧靠布置,然后通过遥控锁死机构将可重组机构和各个收口机构箍紧,使得柔性三维绳网中间的每节绳网被收缚在相邻收口机构之间,柔性三维绳网捕获末端的一节绳网被收缚遥控锁死机构,柔性三维绳网捕获入口端的一节绳网被收缚在可重组机构。
所述绳网系统展开时,可重组机构打开,各个收口机构分离布置,遥控锁死机构打开不连接可重组机构和各个收口机构,使得柔性三维绳网中间的每节绳网自由伸展在相邻收口机构之间,柔性三维绳网捕获末端的一节绳网自由伸展在遥控锁死机构和收口机构之间,柔性三维绳网 捕获入口端的一节绳网自由伸展在可重组机构和收口机构之间。
二、一种空间自主多目标物抓捕方法,其特征在于:
1)在捕获前,可重组机构处于重组收拢状态,柔性三维绳网处于折叠收拢状态,柔性三维绳网中间的每节绳网压缩存储于各个收口机构之间,柔性三维绳网捕获末端的一节绳网压缩存储于遥控锁死机构,柔性三维绳网捕获入口端的一节绳网压缩存储于可重组机构,通过遥控锁死机构将可重组机构与各个收口机构箍紧锁死;
2)捕获开始,遥控锁死机构打开脱离可重组机构和各个收口机构,可重组机构分离展开,柔性三维绳网自由展开成一空间三维网袋,各收口机构处于开口连通状态;
3)捕获进行时,先从第四节绳网捕获到第一个目标物后,最后的第四节绳网入口处的收口机构的收口锁解锁打开,两根横向收口杆在纵向弹簧的弹力作用下分别向矩形框的中部运动,两根纵向收口杆在横向弹簧的弹力作用下分别向矩形框中部运动,使得收口机构中间空间被四根收口杆阻挡,实现第四节绳网的收口闭合;
4)捕获到下一个目标物后,第三节绳网和第二节绳网入口处的收口机构依次均按照步骤3)相同方式实现绳网收口闭合,直至第一节绳网捕获到最后一个目标物,接着可重组机构对接重组,第一节绳网入口处的收口闭合,完成空间自主多目标物抓捕。
本发明具有的有益效果是:
1、本发明相比于传统空间绳网抓捕系统,具有机动性强、捕获距离远及控制易于工程实现等优点。
2、本发明通过可重组机构及收口机构实现每节绳网的展开与收口,可提高绳网捕获的可靠性、降低控制的复杂性。
3、本发明可实现多个空间目标物的抓捕,具有抓捕效率高的优点,且可复制性强,可根据抓捕要求,扩展至任意节绳网。
综合来说,本发明具有容错性好、作业距离远及抓捕效率高等优点,且具有很强的复制性,可根据需要扩展至任意节绳网。
附图说明
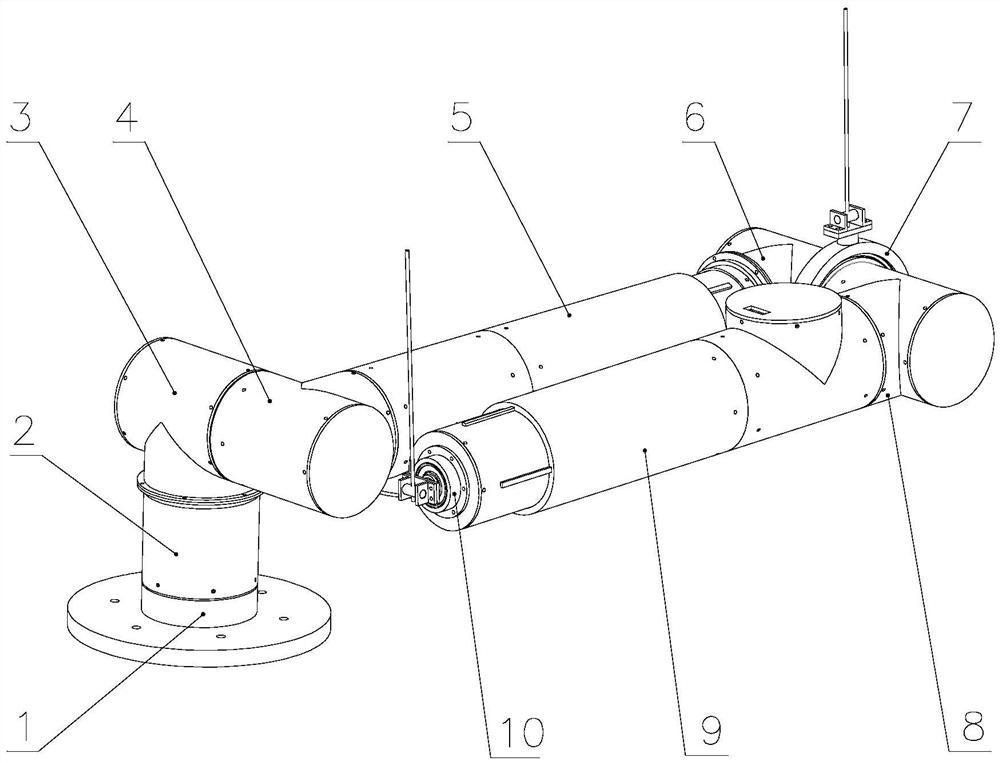
图1是本发明的压缩状态下的空间绳网抓捕系统图。
图2是本发明的收口状态下的收口机构的结构图。
图3是本发明的展开状态下的空间绳网抓捕系统图。
图4是本发明的可重组机构完全收缩时的示意图。
图5是本发明的抓捕一个目标物后的系统示意图。
图6是本发明的抓捕两个目标物后的系统示意图。
图7是本发明的抓捕三个目标物后的系统示意图。
图8是本发明的抓捕四个目标物后的系统示意图。
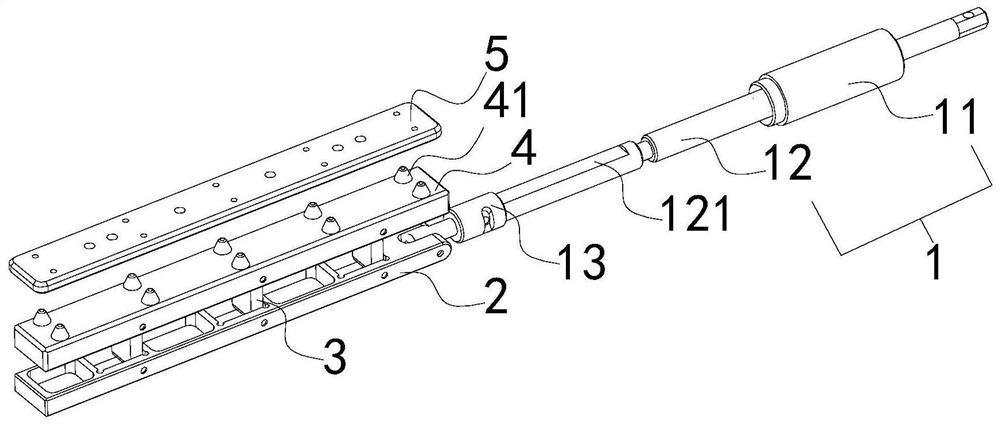
图9是本发明的可重组机构的子机构的结构图。
图10是本发明的开口状态下的收口机构的结构图。
图中:1、可重组机构,2、遥控锁死机构,3、柔性三维绳网,4、收口机构,1.2、弹簧,1.3、导轨,1.4、锥杆,1.5、外壳,1.6、编码器,1.7、电磁刹车,1.8、伺服电机,1.9、张力传感器,1.10、减速器,1.11、第一轴承座,1.12、卷绳筒,1.13、第二轴承座、1.14、辅助导轮,1.15、张力测量轮,1.16、绳长测量轮,1.17、张力预紧器,1.18、走绳板,1.19、底板,1.20、绳长编码器,1.21、收口绳,3.1第一节绳网,3.2、第二节绳网,3.3、第三节绳网,3.4、第四节绳网,4.1、矩形框,4.2、收口锁,4.3、横向弹簧,4.4、纵向弹簧,4.5、横向收口杆,4.6、纵向收口杆。
具体实施方式
下面结合附图和实施例对本发明作进一步说明。
如图1所示,本发明具体实施包括可重组机构1、遥控锁死机构2、柔性三维绳网3和收口机构4;柔性三维绳网3主要由依次衔接布置的第一节绳网3.1、第二节绳网3.2、第三节绳网3.3、第四节绳网3.4组成,每节绳网均由若干根绳沿周向间隔布置围绕,每根绳沿抓捕方向延展,相邻节绳网的绳衔接对接或者成一体绳,柔性三维绳网3的一端系在一起作为捕获末端,另一端连接到可重组机构1作为捕获入口端,相邻节绳网之间安装有收口机构4,通过收口机构4隔离或者连通相邻节绳网内空间;
按照第四节绳网3.4、第三节绳网3.3、第二节绳网3.2、第一节绳网3.1顺序依次捕获目标物体。
如图1所示,绳网系统收拢时,可重组机构1收拢且各个收口机构4沿抓捕方向紧靠布置形成紧密平行同框结构,然后通过遥控锁死机构2将可重组机构1和各个收口机构4箍紧,使得柔性三维绳网3中间的每节绳网被收缚在相邻收口机构4之间,柔性三维绳网3捕获末端的一节绳网被收缚遥控锁死机构2的一侧,柔性三维绳网3捕获入口端的一节绳网被收缚在可重组机构1。
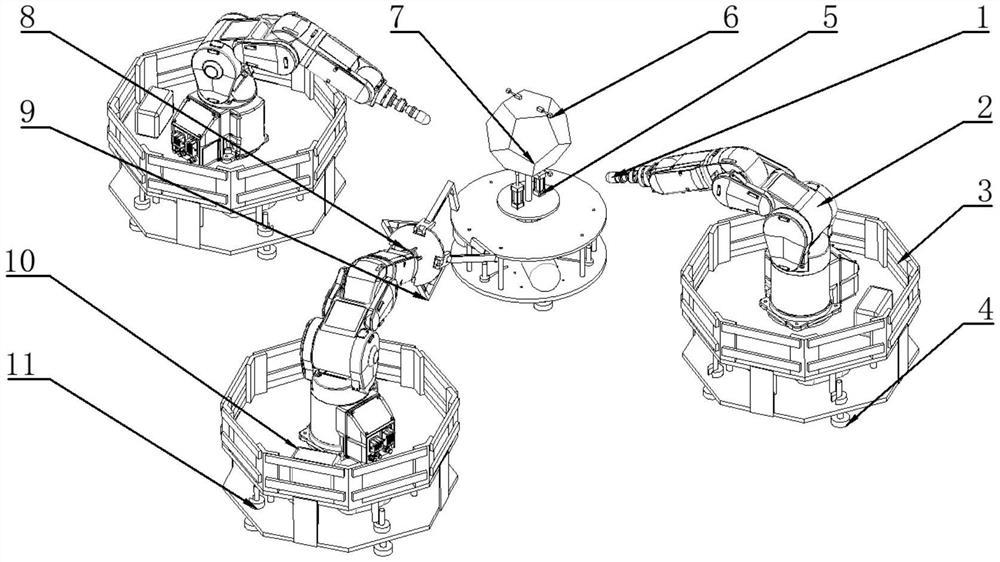
如图4所示,绳网系统展开时,可重组机构1打开,各个收口机构4沿抓捕方向分离布置形成间隔平行同框结构,遥控锁死机构2打开脱离可重组机构1和各个收口机构4,使得柔性三维绳网3中间的每节绳网自由伸展在相邻收口机构4之间,柔性三维绳网3捕获末端的一节绳网自由伸展在遥控锁死机构2和收口机构4之间,柔性三维绳网3 捕获入口端的一节绳网自由伸展在可重组机构1和收口机构4之间。
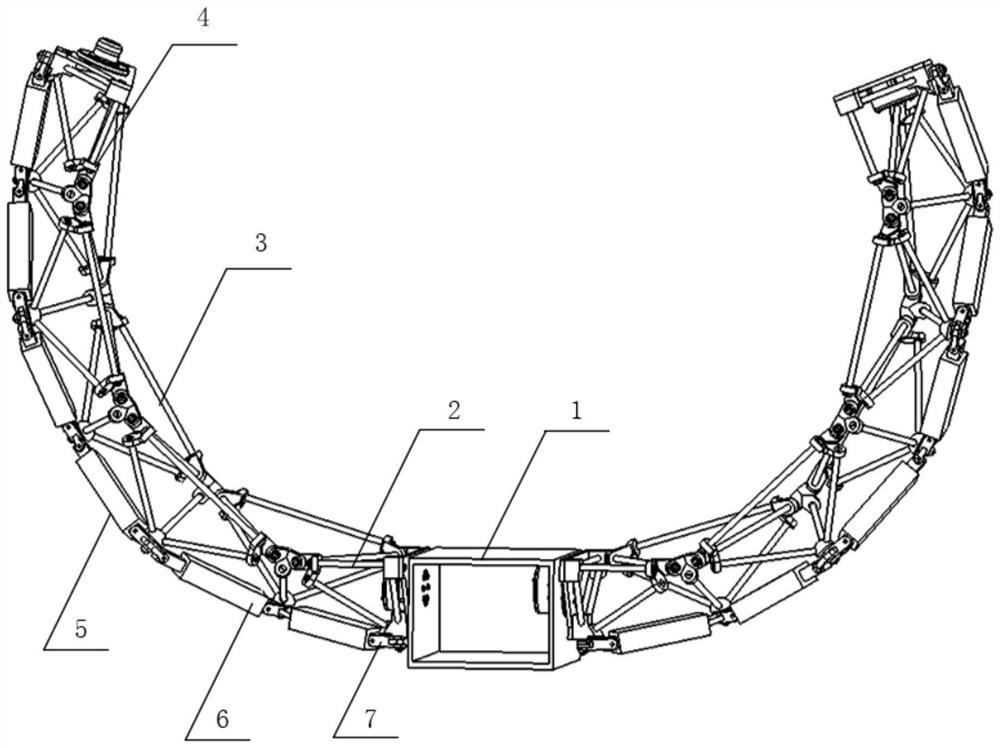
如图2-图3所示,收口机构4包括矩形框4.1、收口锁4.2、两个横向收口组件和两个纵向收口组件,两个横向收口组件分别对称布置在矩形框4.1内圈边框其中相对的两边,两个纵向收口组件分别对称布置在矩形框4.1内圈边框另外相对的两边;横向收口组件包括横向弹簧4.3和横向收口杆4.5,横向收口杆4.5通过纵向弹簧4.4连接到矩形框4.1内圈边框,横向收口杆4.5与矩形框4.1内圈边框外围通过收口锁4.2箍紧;纵向收口组件包括纵向弹簧4.4和纵向收口杆4.6,纵向收口杆4.6通过横向弹簧4.3连接到矩形框4.1内圈边框,纵向收口杆4.6与矩形框4.1内圈边框外围通过收口锁4.2箍紧,收口锁4.2主要由两个U形夹对接而成。
如图2所示,收口机构4收拢时,四个收口锁4.2分别将两个横向收口组件和两个纵向收口组件的四个收口杆箍紧固定在矩形框4.1内圈的四边边框上,弹簧被压缩在收口杆和矩形框4.1内圈边框之间,四组收口组件的四根收口杆均位于矩形框4.1的内圈,未形成对矩形框4.1中间空间的阻挡,从而形成对相邻节绳网内空间的连通作用。
如图3所示,收口机构4展开时,四个收口锁4.2打开脱离于矩形框4.1和收口组件,每个收口组件依靠弹簧作用力将收口杆分离于矩形框4.1内圈边框,移动到矩形框4.1中部,四组收口组件的四根收口杆均位于矩形框4.1中部形成对矩形框4.1中间空间的阻挡,从而形成对相邻节绳网内空间的隔离作用。
柔性三维绳网3的绳网穿设并系于收口机构4的矩形框4.1。具体实施中,横向收口组件和纵向收口组件在矩形框4.1轴向错位布置安装。
遥控锁死机构2主要由两个U形架对接构成,其中一个U形架连接于可重组机构1,另一个U形架设有柔性三维绳网3捕获末端集中系接的收口。遥控锁死机构2通过无线进行开关控制。
如图9-图10所示,可重组机构1主要由四个结构相同的重组子机构a、b、c、d构成,通过重组子机构的展开分离与靠拢对接实现第一节绳网的展开与收口;可重组机构1中,相邻两个重组子机构a、b、c、d之间连接有收口绳1.21,柔性三维绳网3捕获入口端的绳网端部连接到收口绳1.21。
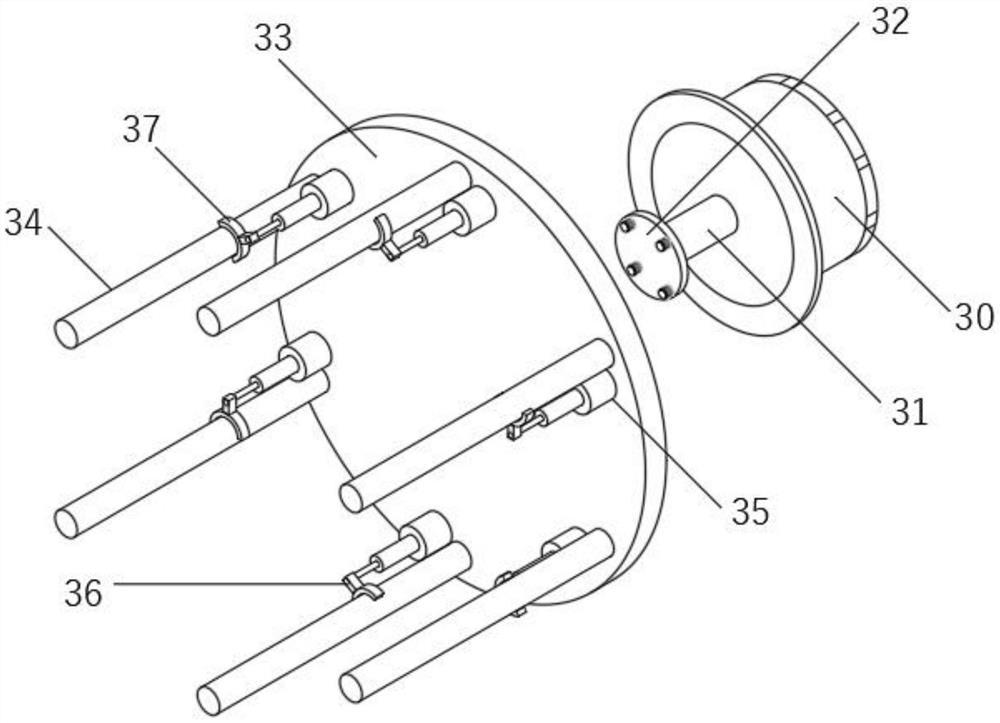
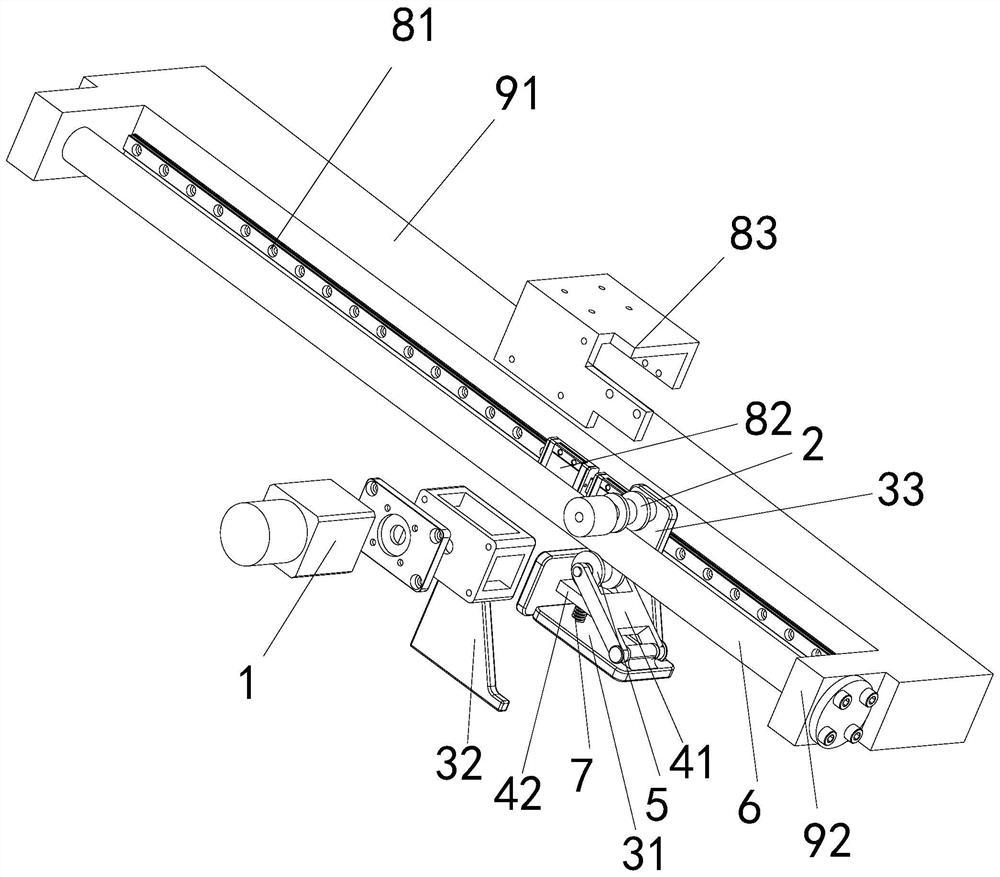
具体实施中,可重组机构1可以采用申请日为“2016年10月25日”,申请号为“201610937892.7”,发明名称为“用于空间绳系编队飞行的可重组机构”的发明专利申请中发明内容所记载的技术方案。如图9所示,具体来说,可重组机构1中每个结构相同的重组子机构a/b/c/d具体为:在外壳1.5内,锥筒1.1大端安装在外壳1.5的左侧板外侧,四根导轨1.3垂直均布在外壳1.5的中间板侧面上,每根弹簧1.2均套于各自导轨1.3的导轨杆上,导轨杆的端部与锥筒1.1大端的端面连接,每根弹簧1.2两端分别连接在导轨1.3中部的凸缘与锥筒1.1的端面进行限位,锥杆1.4大端固定在外壳1.5的后板外的中心处。
编码器1.6与电磁刹车1.7的一端连接,电磁刹车1.7的另一端与伺服电机1.8的一端连接,伺服电机1.8的另一端与减速器1.10的一端连接,减速器1.10的另一端固定在第一轴承座1.11上,减速器1.10输出轴穿过第一轴承座1.11轴承内圈经卷绳筒1.12中心孔与第二轴承座1.13轴承内圈转动连接,第一轴承座1.11与第二轴承座1.13的底部均安装在底板1.19上表面,底板1.19上垂直装有走绳板1.18,走绳板1.18与锥筒1.1轴线平行,走绳板1.18从左至右依次安装有张力预紧器1.17、带有绳长测量轮1.16的绳长编码器1.20、带有张力测量轮1.15的张力传感器1.9及辅助轮1.14。
收口绳1.21的一端从外壳1.5外由锥筒1.1中心孔进入后,依次经过张力预紧器1.17、绳长测量轮1.16、张力测量轮1.15和辅助导轮1.14后,固定在卷绳筒1.12内壁处。重组子机构a/b/c/d的收口绳1.21的另一端与相邻一套重组子机构a/b/c/d的锥杆1.4的中部连接。
如图2所示,绳网系统收拢时,可重组机构1收拢且各个收口机构4沿抓捕方向紧靠布置形成紧密平行同框结构,然后通过遥控锁死机构2将可重组机构1和各个收口机构4箍紧,使得柔性三维绳网3中间的每节绳网被收缚在相邻收口机构4之间,柔性三维绳网3捕获末端的一节绳网被收缚遥控锁死机构2的一侧,柔性三维绳网3捕获入口端的一节绳网被收缚在可重组机构1。
如图4所示,绳网系统展开时,可重组机构1打开,各个收口机构4沿抓捕方向分离布置形成间隔平行同框结构,遥控锁死机构2打开不连接可重组机构1和各个收口机构4,使得柔性三维绳网3中间的每节绳网自由伸展在相邻收口机构4之间,柔性三维绳网3捕获末端的一节绳网自由伸展在遥控锁死机构2和收口机构4之间,柔性三维绳网3 捕获入口端的一节绳网自由伸展在可重组机构1和收口机构4之间。
本发明系统的空间自主多目标物抓捕方法如下:
1)如图1所示,在捕获前,可重组机构1处于重组收拢状态,即可重组机构1中的各个重组子机构a、b、c、d处于相互嵌套的重组状态,柔性三维绳网3处于折叠收拢状态,柔性三维绳网3中间的每节绳网压缩存储于各个收口机构4之间,柔性三维绳网3捕获末端的一节绳网压缩存储于遥控锁死机构2的一侧,柔性三维绳网3捕获入口端的一节绳网压缩存储于可重组机构1,通过遥控锁死机构2将可重组机构1与各个收口机构4箍紧锁死;
2)如图4所示,捕获开始,遥控锁死机构2打开脱离可重组机构1和各个收口机构4,可重组机构1通过内部弹簧弹射分离展开,即可重组机构1中的各个重组子机构a、b、c、d通过内部弹簧弹射分离展开,可重组机构1和各个收口机构4相互之间自由分离,相邻收口机构4之间的柔性三维绳网3中间的每节绳网自由伸展,遥控锁死机构2和收口机构4之间的捕获末端的柔性三维绳网3一节绳网自由伸展,可重组机构1和收口机构4之间的捕获入口端的柔性三维绳网3一节绳网自由伸展,使得柔性三维绳网3自由展开成一空间三维网袋,各收口机构4处于开口连通状态,即四个收口锁4.2分别将两个横向收口组件和两个纵向收口组件的四个收口杆箍紧固定在矩形框4.1内圈的四边边框上,弹簧被压缩在收口杆和矩形框4.1内圈边框之间,四组收口组件的四根收口杆均位于矩形框4.1的内圈,矩形框4.1中间空间未被收口杆阻挡;
3)捕获进行时,如图5所示,先从第四节绳网3.4捕获到第一个目标物后,最后的第四节绳网3.4入口处的收口机构4的收口锁4.2解锁打开,两根横向收口杆4.5在纵向弹簧4.4的弹力作用下分别向矩形框4.1的中部运动,两根纵向收口杆4.6在横向弹簧4.3的弹力作用下分别向矩形框4.1中部运动,使得收口机构4中间空间被四根收口杆阻挡,第四节绳网3.4和第三节绳网3.3之间隔离,实现第四节绳网3.4的收口闭合,
4)捕获到下一个目标物后,第三节绳网3.4和第二节绳网3.4入口处的收口机构4依次均按照步骤3)相同方式实现绳网收口闭合,分别如图6-图7所示,直至第一节绳网3.4捕获到最后一个目标物,接着可重组机构1通过内部系绳收放装置收拢系绳实现子结构a、b、c、d对接重组,分别如图8所示,即使得可重组机构1中的各个重组子机构a、b、c、d再次处于相互嵌套的重组状态,第一节绳网3.1入口处的收口闭合,完成空间自主多目标物抓捕。
一种空间自主多目标物抓捕绳网系统和方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0