







专利摘要
本发明涉及一种轨道建筑空间扫描信息的点云数据处理方法,该处理方法通过沿轨道运动的工务检测车以及设在轨道上的信标实现,包括以下步骤:1)分别记录下两个光电编码器由检测开始起算的检测脉冲序号X1和X2;2)校正检测脉冲序号并获得脉冲序号X1和X2时两个车轮所经过的绝对距离N1和N2;3)根据激光扫描仪输出的同步信号以及绝对距离N1和N2,计算第K个同步信号与相邻同步信号周期内工务检测车两个车轮的行走距离C1和C2;4)计算机将同步信号序号K、检测脉冲序号X1、X2以及车轮的行走距离C1、C2以标准化的表格形式输出。与现有技术相比,本发明无需引入IMU和GPS系统、成本低、易于实现。
权利要求
1.一种轨道建筑空间扫描信息的点云数据处理方法,该处理方法通过沿轨道运动的工务检测车以及沿二根轨道中心铺设的信标实现,所述的工务检测车上设有光电接近传感器、激光扫描仪、计算机和两个光电编码器,两个光电编码器分别设在该工务检测车同一轮轴的两端,根据车轮的转动检测输出检测,其特征在于,所述的处理方法包括以下步骤:
1)计算机分别记录下两个光电编码器由检测开始起算的检测脉冲序号X1和X2;
2)根据光电接近传感器对信标的检测信息,校正检测脉冲序号并获得脉冲序号X1和X2时两个车轮所经过的绝对距离N1和N2;
3)根据激光扫描仪输出的同步信号以及脉冲序号X1和X2时两个车轮所经过的绝对距离N1和N2,计算第K个同步信号与相邻同步信号间隔周期内工务检测车两个车轮的行走距离C1和C2;
4)计算机将同步信号序号K、检测脉冲序号X1、X2以及车轮的行走距离C1、C2以标准化的表格形式输出。
2.根据权利要求1所述的一种轨道建筑空间扫描信息的点云数据处理方法,其特征在于,步骤2)中绝对距离N1和N2的计算公式为:
N1=(X1+J1)2πR/M
N2=(X2+J2)2πR/M
式中,J1和J2分别为两个光电编码器的有向脉冲状态,若工务检测车正向运动则J1和J2为+1,若工务检测车反向运动则J1和J2为-1,π为圆周率,R为车轮半径,M为车轮转动一周所输出的脉冲数。
3.根据权利要求1所述的一种轨道建筑空间扫描信息的点云数据处理方法,其特征在于,步骤3)中两个车轮的行走距离C1和C2分别通过以下公式计算得到:
C1(K)=[N1(K)-N1(K-1)]
C2(K)=[N2(K)-N2(K-1)]
式中,K表示输出第K个脉冲时的数据、K-1表示输出第K-1个脉冲时的数 据。
4.根据权利要求1所述的一种轨道建筑空间扫描信息的点云数据处理方法,其特征在于,所述的标准化的表格形式为:
K X1(K) X2(K) C1(K) C2(K)。
说明书
技术领域
本发明涉及一种数据处理方法,尤其是涉及一种轨道建筑空间扫描信息的点云数据处理方法。
背景技术
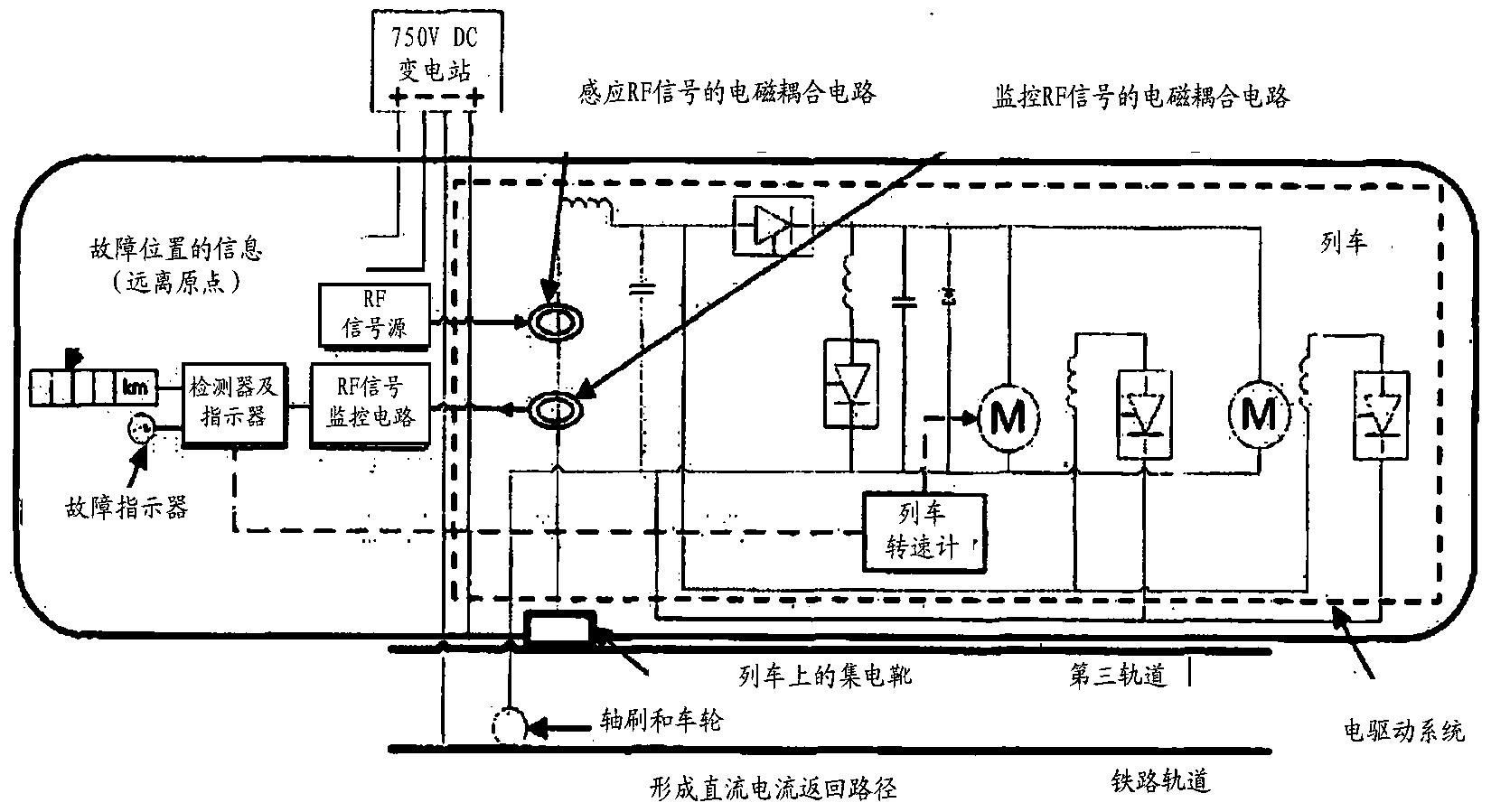
城市轨道交通运营管理的发展,需要对地下隧道的轨道线路沿线建筑空间形状进行数字记录,作为数字化维护保障管理信息系统的空间数据库。将3D激光扫描仪设置成2D扫描模式并安装在轨道小车上,可完成对沿线建筑空间形状数据的采集。对这种轨道小车的基本要求是,除了要有合理的定位功能,还需要获取实际轨道线路曲直度行走轨迹,作为第3维坐标信息填入2D激光扫描数据的缺失维度中。按常理,要使行走车辆可记录轨道曲直度行走轨迹,需要引入惯性导航(IMU)结合全球定位系统(GPS)的空间定位方法。由于IMU系统复杂且价格昂贵,在地下隧道又无法引入GPS系统。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种无需引入IMU和GPS系统、成本低、易于实现的轨道建筑空间扫描信息的点云数据采集与处理方法。
本发明的目的可以通过以下技术方案来实现:
一种轨道建筑空间扫描信息的点云数据处理方法,该处理方法通过沿轨道运动的工务检测车以及设在二根轨道中心上的信标实现,所述的工务检测车上设有光电接近传感器、激光扫描仪、计算机和两个光电编码器,两个光电编码器分别设在该工务检测车同一轮轴的两端,根据车轮的转动输出检测脉冲,所述的处理方法包括以下步骤:
1)计算机分别记录下两个光电编码器由检测开始起算的检测脉冲序号X1和X2;
2)根据光电接近传感器对信标的检测信息,校正检测脉冲序号并获得输出脉冲序号X1和X2时两个车轮所经过的绝对距离N1和N2;
3)根据激光扫描仪输出的同步信号以及脉冲序号X1和X2时两个车轮所经过的绝对距离N1和N2,计算第K个同步信号与相邻同步信号周期内工务检测车两个车轮的行走距离C1和C2;
4)计算机将同步信号序号K、检测脉冲序号X1、X2以及车轮的行走距离C1、C2以标准化的表格形式输出。
步骤2)中绝对距离N1和N2的计算公式为:
N1=(X1+J1)2πR/M
N2=(X2+J2)2πR/M
式中,J1和J2分别为两个光电编码器的有向脉冲状态,若为工务检测车正向运动则J1和J2为+1,若工务检测车反向运动则J1和J2为-1,π为圆周率,R为车轮半径,M为车轮转动一周所输出的脉冲数。
步骤3)中两个车轮的行走距离C1和C2分别通过以下公式计算得到:
C1(K)=[N1(K)-N1(K-1)]
C2(K)=[N2(K)-N2(K-1)]
式中,K表示输出第K个脉冲时的数据、K-1表示输出第K-1个脉冲时的数据。
所述的标准化的表格形式为:K X1(K) X2(K) C1(K) C2(K)。
与现有技术相比,本发明回避了IMU和GPS等复杂技术手段,采用简易低廉的方法实现地下隧道工务检测车辆曲直度行走轨迹的检测和记录,还可广泛应用于其它类似场合。
附图说明
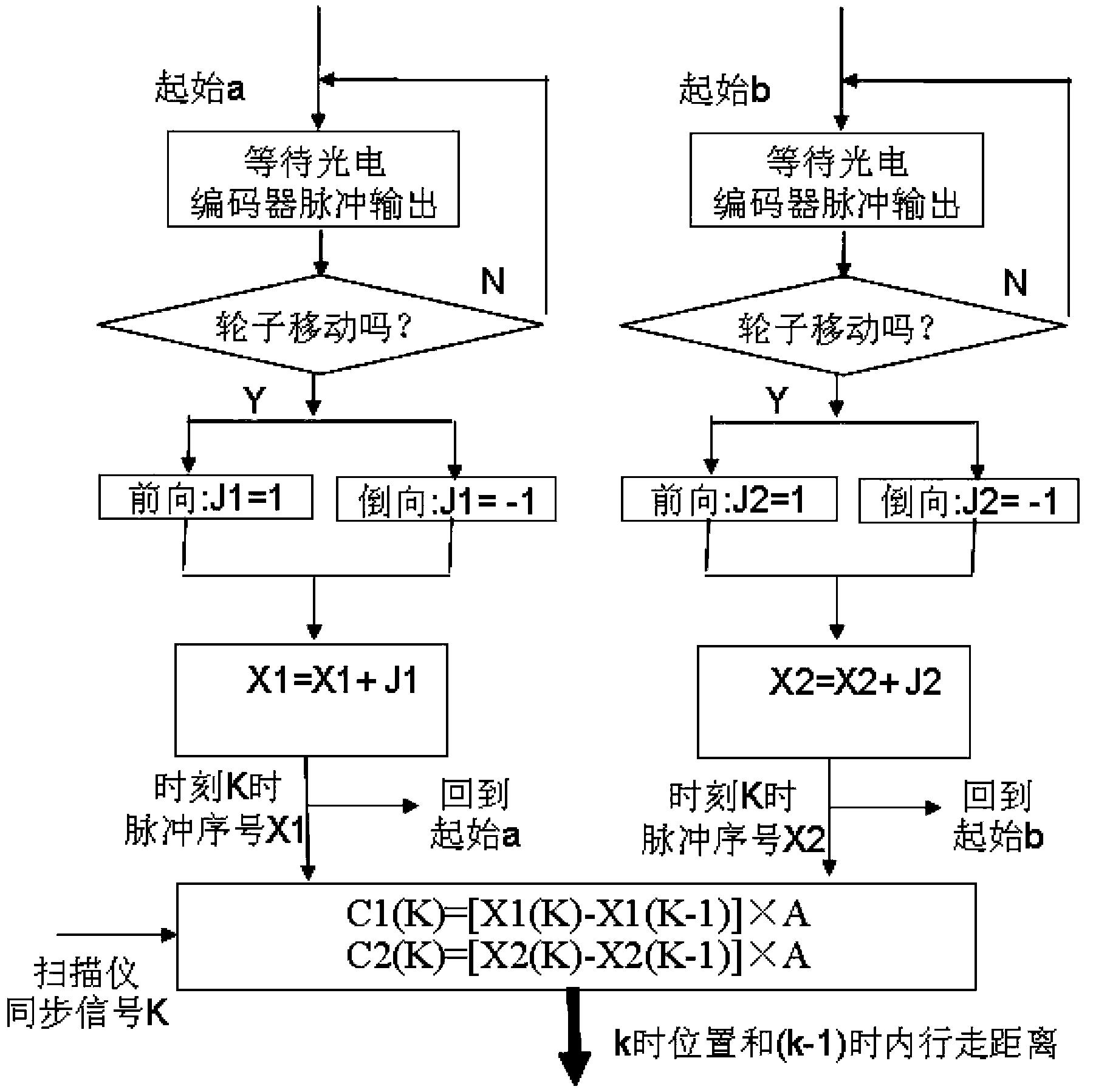
图1为本发明的流程图;
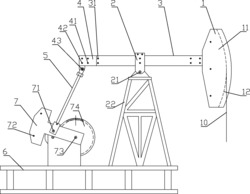
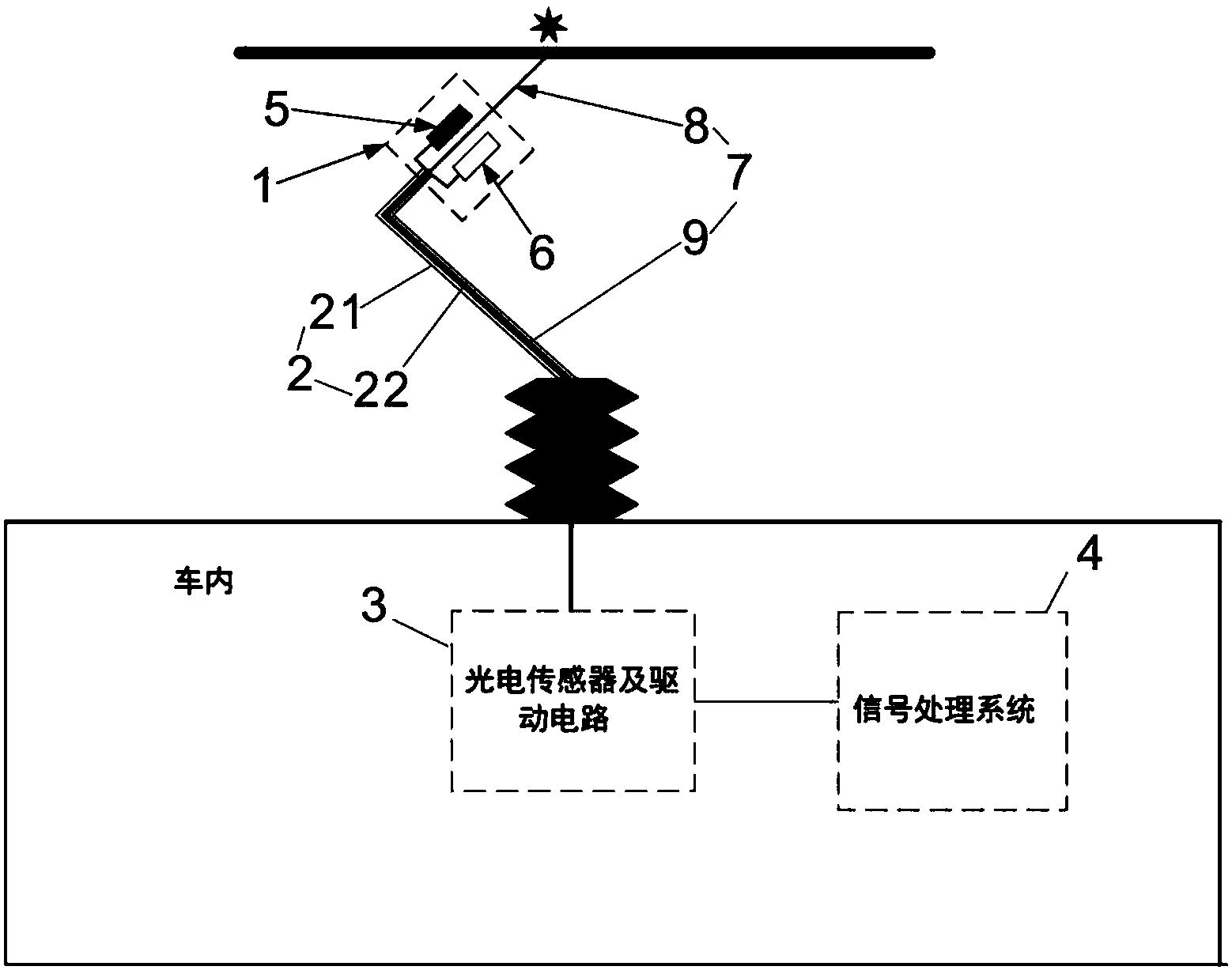
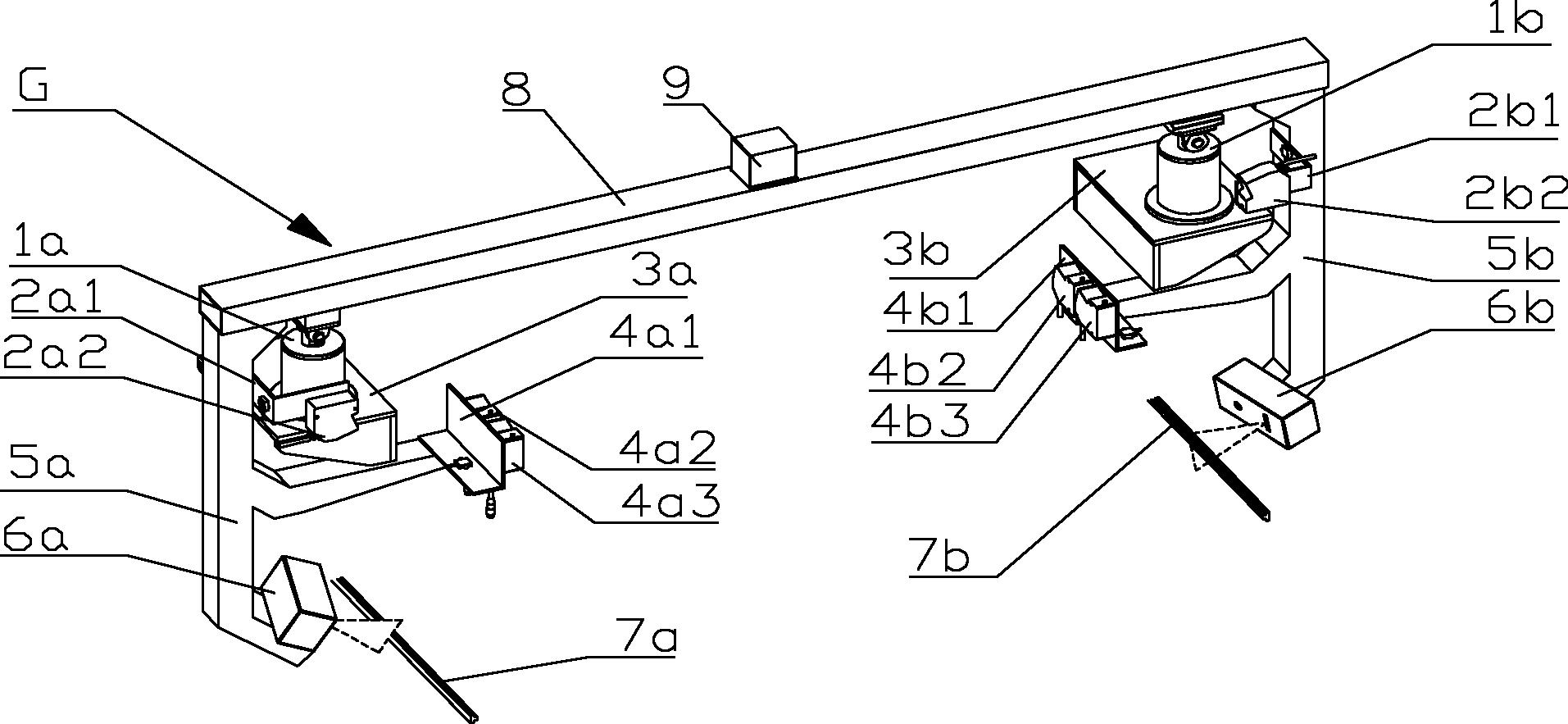
图2为本发明光电编码器安装的结构示意图;
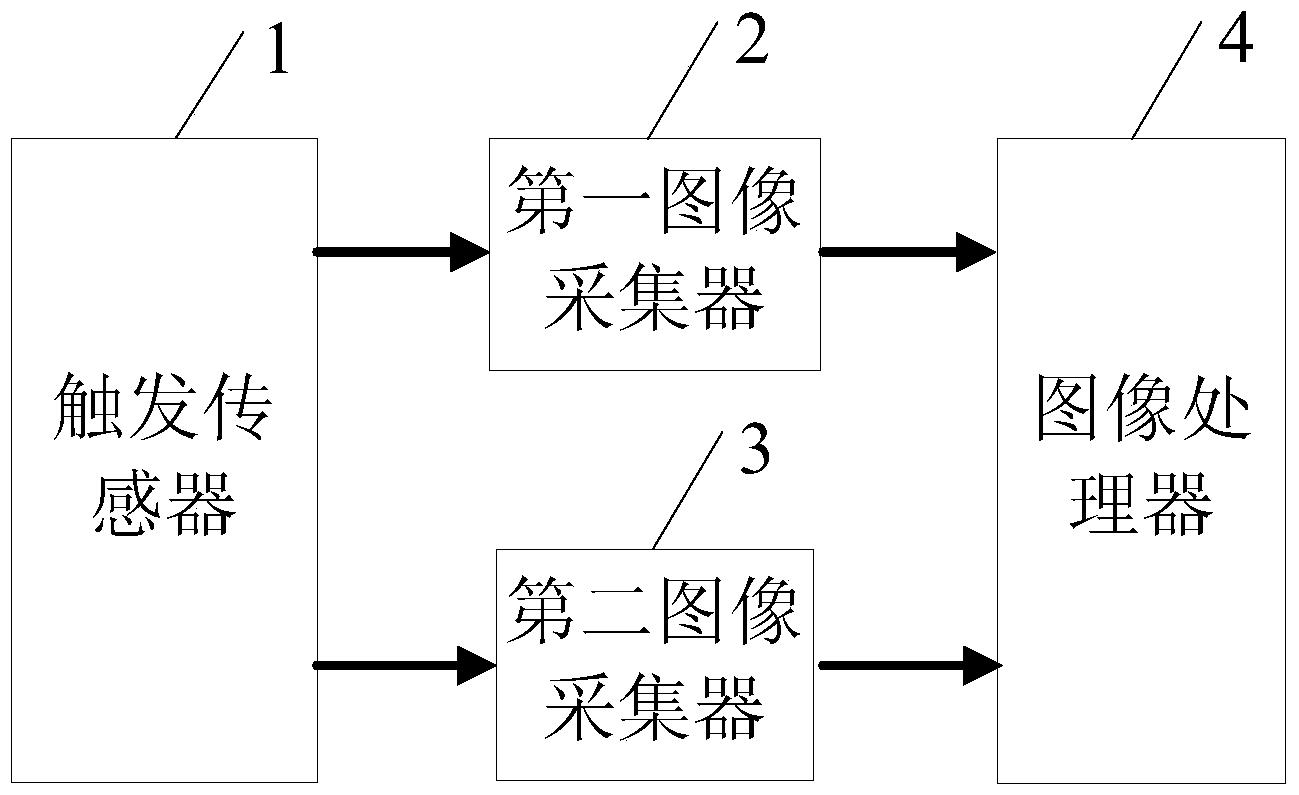
图3为本发明中工务检测车上信号流图;
图4为本发明的检测原理图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
实施例
一种轨道建筑空间扫描信息的点云数据处理方法,该处理方法通过沿轨道运动的工务检测车以及设在轨道上的信标实现。工务检测车上设有光电接近传感器、激光扫描仪5、计算机7和两个光电编码器1。两个光电编码器1的安装结构如图2所示,通过支架2分别设在该工务检测车轮轴4的两端,根据车轮3的转动输出检测脉冲,两个光电编码器1和激光扫描仪5均通过接口板5接入计算机7,计算机7采用美国NI公司的信息处理软件Labview来完成处理过程。
该处理方法检测原理如图4所示,其具体步骤如图1所示:
1)根据光电编码器的输出,判断是否移动,并根据向前移动还是向后移动,设定脉冲累加值,向前的累加值J1为+1,向后的累加值J2为-1;
2)计算机分别记录下两个光电编码器由检测开始起算的检测脉冲序号X1和X2,并根据车辆行走时编码器输出对脉冲序号进行累加,信标具体的累加策略为:X1=X1+J1,X2=X2+J2。同时计算输出脉冲序号X1和X2时,两个车轮所经过的绝对距离N1和N2,分别为:
N1=(X1+J1)2πR/M
N2=(X2+J2)2πR/M
M为车轮每转动一圈光电编码器输出的脉冲数,本实施例中为1024。
3)根据激光扫描仪输出的同步信号以及脉冲序号X1和X2时两个车轮所经过的绝对距离N1和N2,计算第K个同步信号与相邻同步信号周期内工务检测车两个车轮的行走距离C1和C2,具体的计算公式为:
C1(K)=[N1(K)-N1(K-1)]
C2(K)=[N2(K)-N2(K-1)]
式中,K表示输出第K个脉冲时的数据、K-1表示输出第K-1个脉冲时的数据。
4)计算机将同步信号序号K、检测脉冲序号X1、X2以及车轮的行走距离C1、C2以标准化的表格形式输出,此标准化的表格形式为:
K X1(K) X2(K) C1(K) C2(K)。
本发明回避了IMU和GPS等复杂技术手段,采用简易低廉的方法实现地下隧道工务检测车辆曲直度行走轨迹的检测和记录,还可广泛应用于其它类似场合。
一种轨道建筑空间扫描信息的点云数据处理方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0