





专利摘要
本发明提供了一种受电弓动态运行性能控制方法及装置,该受电弓动态运行性能控制方法包括:进行受电弓线路空气动力学性能试验,生成所述受电弓在不同开口方向及速度级的空气动力学性能参数;进行受电弓弓网受流性能试验,生成所述受电弓在不同运行线路、不同开口方向及速度级的受电弓弓网受流性能参数;利用二次多项式曲线回归方法,根据所述受电弓弓网受流性能参数及空气动力学数据绘制不同速度级及不同开口方向下的弓网接触力趋势回归曲线;根据所述弓网接触力趋势回归曲线控制受电弓的动态运行性能。利用本发明,能够保证受电弓的受电弓动态运行性能参数得到准确控制,进而准确控制受电弓和接触网间接触力,保证弓网受电弓良好受流。
说明书
技术领域
本发明是关于受电弓控制技术,特别是关于一种受电弓动态运行性能控制方法及装置。
背景技术
受电弓是动车组和电力机车运行的重要设备,其与接触网间良好匹配是动车组和电力机车正常受流的保证。对受电弓多个过程中的性能进行测试,完成受电弓的弓网匹配性能可以使受电弓的受电弓动态运行性能参数得到准确控制,目前还没有实现上述功能的方法,无法实现动车组和电力机车正常的受流。
发明内容
本发明提供一种受电弓动态运行性能控制方法及装置,以保证受电弓的受电弓动态运行性能参数得到准确控制。
为了实现上述目的,本发明实施例提供一种受电弓动态运行性能控制方法,该受电弓动态运行性能控制方法包括:
进行受电弓线路空气动力学性能试验,生成所述受电弓在不同开口方向及速度级的空气动力学性能参数;
进行受电弓弓网受流性能试验,生成所述受电弓在不同运行线路、不同开口方向及速度级的受电弓弓网受流性能参数;
利用二次多项式曲线回归方法,根据所述受电弓弓网受流性能参数及空气动力学数据绘制不同速度级及不同开口方向下的弓网接触力趋势回归曲线;
根据所述弓网接触力趋势回归曲线控制受电工的动态运行性能。
一实施例中,所述空气动力学性能参数包括空气动力学数据,进行受电弓线路空气动力学性能试验,生成所述受电弓在不同开口方向及速度级的空气动力学性能参数,包括:
利用在受电弓的工头滑板上固定的多个力传感器采集空气动力信号;
利用车内的数据采集设备获取所述空气动力信号,对所述空气动力信号光电转换、放大、滤波及数模转换后得到所述受电弓在不同开口方向及速度级的空气动力学数据。
一实施例中,弓网受流性能参数包括弓网接触力数据及燃弧数据,进行受电弓弓网受流性能试验,生成所述受电弓在不同运行线路、不同开口方向及速度级的受电弓弓网受流性能参数,包括:
利用在受电弓上固定的接触力传感器及燃弧传感器分别采集弓网接触力信号及燃弧信号;
利用车内的数据采集设备获取所述弓网接触力信号及燃弧信号,对所述空气动力信号光电转换、放大、滤波及数模转换后得到所述受电弓在不同开口方向及速度级的弓网接触力数据及燃弧数据。
一实施例中,受电弓动态运行性能控制方法还包括:
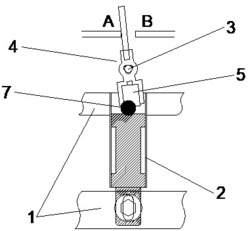
将所述接触力传感器固定于所述受电弓工头的接触力传感器,将所述燃弧传感器固定于所述受电弓底座。
一实施例中,利用二次多项式曲线回归方法,根据所述受电弓弓网受流性能参数及空气动力学数据绘制不同速度级及不同开口方向下的弓网接触力趋势回归曲线,包括:
利用二次多项式曲线回归方法,根据所述弓网接触力数据拟合得到不同速度级及不同开口方向下的弓网接触力趋势回归曲线;
根据所述空气动力学数据及燃弧数据对所述弓网接触力趋势回归曲线进行修正。
一实施例中,根据所述弓网接触力趋势回归曲线控制受电工的动态运行性能,包括:
根据所述弓网接触力趋势回归曲线上弓网接触力数据与受电弓升弓压力的映射关系,得到受电弓主动控制曲线;
根据所述受电弓主动控制曲线调节受电弓升弓压力。
为了实现上述目的,本发明实施例还提供了一种受电弓动态运行性能控制装置,包括:
空气动力学性能参数生成单元,用于进行受电弓线路空气动力学性能试验,生成所述受电弓在不同开口方向及速度级的空气动力学性能参数;
弓网受流性能参数生成单元,用于进行受电弓弓网受流性能试验,生成所述受电弓在不同运行线路、不同开口方向及速度级的受电弓弓网受流性能参数;
曲线绘制单元,用于利用二次多项式曲线回归方法,根据所述受电弓弓网受流性能参数及空气动力学数据绘制不同速度级及不同开口方向下的弓网接触力趋势回归曲线;
性能控制单元,用于根据所述弓网接触力趋势回归曲线控制受电工的动态运行性能。
一实施例中,所述空气动力学性能参数生成单元包括:
力传感器,设置在受电弓的工头滑板上,用于采集空气动力信号;
数据采集设备,设置在车内,用于获取所述空气动力信号,对所述空气动力信号光电转换、放大、滤波及数模转换后得到所述受电弓在不同开口方向及速度级的空气动力学数据。
一实施例中,所述弓网受流性能参数生成单元包括:
接触力传感器,用于采集弓网接触力信号;
燃弧传感器,用于采集燃弧信号;
所述数据采集设备获取所述弓网接触力信号及燃弧信号,对所述空气动力信号光电转换、放大、滤波及数模转换后得到所述受电弓在不同开口方向及速度级的弓网接触力数据及燃弧数据。
一实施例中,所述接触力传感器固定于所述受电弓工头,所述燃弧传感器固定于所述受电弓底座。
一实施例中,所述曲线绘制单元包括:
曲线拟合模块,用于利用二次多项式曲线回归方法,根据所述弓网接触力数据拟合得到不同速度级及不同开口方向下的弓网接触力趋势回归曲线;
曲线修正模块,用于根据所述空气动力学数据及燃弧数据对所述弓网接触力趋势回归曲线进行修正。
一实施例中,所述性能控制单元包括:
映射模块,用于根据所述弓网接触力趋势回归曲线上弓网接触力数据与受电弓升弓压力的映射关系,得到受电弓主动控制曲线;
压力调节模块,用于根据所述受电弓主动控制曲线调节受电弓升弓压力。
利用本发明,能够保证受电弓的受电弓动态运行性能参数得到准确控制,进而准确控制受电弓和接触网间接触力,保证弓网受电弓良好受流。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
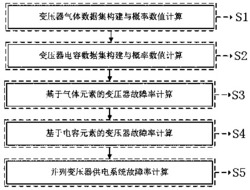
图1为本发明实施例的受电弓动态运行性能控制方法流程图;
图2为本发明实施例的受电弓线路空气动力学性能试验方法流程图;
图3为本发明实施例的受电弓弓网受流性能试验方法流程图;
图4为本发明实施例的弓网接触力趋势回归曲线拟合方法流程图;
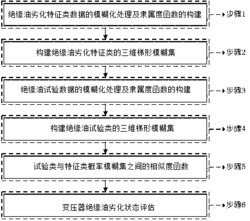
图5为拟合得到的弓网接触力趋势回归曲线示意图;
图6为根据弓网接触力趋势回归曲线控制受电工的动态运行性能的方法流程图;
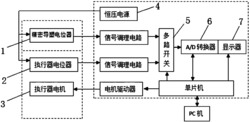
图7为本发明实施例的受电弓动态运行性能控制装置的结构示意图;
图8为本发明实施例的空气动力学性能参数生成单元701的结构示意图;
图9弓网受流性能参数生成单元702的结构示意图;
图10为本发明实施例的曲线绘制单元703的结构示意图;
图11为本发明实施例性能控制单元704的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
图1为本发明实施例的受电弓动态运行性能控制方法流程图,如图1所示,该受电弓动态运行性能控制方法包括:
S101:进行受电弓线路空气动力学性能试验,生成所述受电弓在不同开口方向及速度级的空气动力学性能参数;
S102:进行受电弓弓网受流性能试验,生成所述受电弓在不同运行线路、不同开口方向及速度级的受电弓弓网受流性能参数;
S103:利用二次多项式曲线回归方法,根据所述受电弓弓网受流性能参数及空气动力学数据绘制不同速度级及不同开口方向下的弓网接触力趋势回归曲线;
S104:根据所述弓网接触力趋势回归曲线控制受电工的动态运行性能。
由图1所示的流程可知,本发明通过进行受电弓线路空气动力学性能试验及受电弓弓网受流性能试验,分别获得空气动力学性能参数及受电弓弓网受流性能参数,根据空气动力学性能参数及受电弓弓网受流性能参数,可以拟合出弓网接触力趋势回归曲线,根据该弓网接触力趋势回归曲线就可以控制受电工的动态运行性能能够,保证受电弓的受电弓动态运行性能参数得到准确控制。
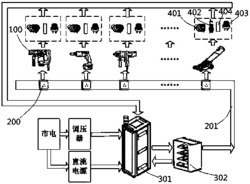
受电弓线路空气动力学性能试验中,需要用到力传感器及数据采集设备,其中,数据采集设备包括:光电转换模块、滤波放大模块及数模转换模块等。在进行受电弓线路空气动力学性能试验之前,需要将多个力传感器固定在受电弓的工头滑板上,力传感器一般可以为2-4个。数据采集设备安装在动车或电力机车内,并且通过光纤连接至力传感器。图2为本发明实施例的受电弓线路空气动力学性能试验方法流程图,具体试验时,如图2所示,包括如下步骤:
S201:利用多个力传感器采集空气动力信号;
S202:利用数据采集设备获取所述空气动力信号,对空气动力信号光电转换、放大、滤波及数模转换后得到所述受电弓在不同开口方向及速度级的空气动力学数据。
图2所示的流程中,空气动力学性能试验需要针对不同开口方向的受电弓,并且需要划分动车或电力机车的不同速度等级,测试在不同开口方向及速度级下的受电弓线路空气动力学性能。空气动力学数据主要包括不同开口方向及速度级下的空气动态抬升力(简称空气动力)。
受电弓弓网受流性能试验中,需要用到接触力传感器、燃弧传感器及上述的数据采集设备。数据采集设备包括:光电转换模块、滤波放大模块及数模转换模块等。在进行受电弓弓网受流性能试验之前,需要将多个接触力传感器固定在受电弓的工头滑板上,将多个燃弧传感器固定在受电弓底座上。数据采集设备安装在动车或电力机车内,并且通过光纤连接至接触力传感器及燃弧传感器。图3为本发明实施例的受电弓弓网受流性能试验方法流程图,具体试验时,如图3所示,包括如下步骤:
S301:利用接触力传感器及燃弧传感器分别采集弓网接触力信号及燃弧信号;
S302:利用数据采集设备获取所述弓网接触力信号及燃弧信号,对所述空气动力信号光电转换、放大、滤波及数模转换后得到所述受电弓在不同开口方向及速度级的弓网接触力数据及燃弧数据。
图3所示的受电弓弓网受流性能试验中,需要在不同的线路、不同开口方向及速度等级下分别进行受电弓弓网受流性能试验。选定动车或电力机车的行车路线后,气动力学性能试验需要针对不同开口方向的受电弓,并且需要划分动车或电力机车的不同速度等级,测试在不同开口方向及速度级下的受电弓线路空气动力学性能。对于同选定的路线,弓网接触力数据主要包含接触力的大小,燃弧数据主要包含燃弧次数、燃弧时间及燃弧率等。
完成受电弓线路空气动力学性能试验及受电弓弓网受流性能试验之后,可以进行弓网接触力趋势回归曲线的拟合。图4为本发明实施例的弓网接触力趋势回归曲线拟合方法流程图,如图4所示,弓网接触力趋势回归曲线拟合方法包括如下步骤:
S401:利用二次多项式曲线回归方法,根据所述弓网接触力数据拟合得到不同速度级及不同开口方向下的弓网接触力趋势回归曲线。
图5为拟合得到的弓网接触力趋势回归曲线示意图,图5中,横坐标为速度,纵坐标为接触力。
S402:根据所述空气动力学数据及燃弧数据对所述弓网接触力趋势回归曲线进行修正。
S402具体实施时,一般先根据空气动力学数据对弓网接触力趋势回归曲线进行修正,然后在在基础上,根据燃弧数据对弓网接触力趋势回归曲线进行进一步的修正。
举一例说明根据空气动力学数据对弓网接触力趋势回归曲线进行修正,假设在某一速度a下,弓网接触力趋势回归曲线上对应的接触力值为b,接触力的标准值为c(设c大于b),而受电弓线路空气动力学性能试验得到的速度a时的空气动力为d,此时将接触力的值修正为(b+d)。依照该修正方法,完成对所有接触力的修正。对修正后的所有接触力与对应的速度的曲线为修正后的弓网接触力趋势回归曲线。
之后,可以根据燃弧数据对弓网接触力趋势回归曲线进行进一步的修正,举一例,假设在某一速度g下,弓网接触力趋势回归曲线上对应的接触力值为h,接触力的标准值为i(设i大于h),将燃弧数据的燃弧率e与标准燃弧率f进行比较,如果e小于f,则修正后的接触力的值为 其中j的取值范围为[0,i-h]。基于此,可以完成对所有接触力的进一步修正。
根据燃弧数据完成修正之后,可以据此控制受电工的动态运行性能,图6为根据弓网接触力趋势回归曲线控制受电工的动态运行性能的方法流程图。具体地,如图6所示,该方法包括如下步骤:
S601:根据所述弓网接触力趋势回归曲线上弓网接触力数据与受电弓升弓压力的映射关系,得到受电弓主动控制曲线;
弓网接触力数据与受电弓升弓压力存在一一对应的映射关系表,根据该映射关系表可以找到每一弓网接触力数据对应的受电弓升弓压力,根据受电弓升弓压力可以得到受电弓升弓压力与速度的关系曲线,即受电弓主动控制曲线,该受电弓主动控制曲线的横坐标为速度,纵坐标为受电弓升弓压力。
S602:根据所述受电弓主动控制曲线调节受电弓升弓压力。根据受电弓主动控制曲线上的受电弓升弓压值,就可以调节受电弓升弓压力,控制受电工的弓网受流性能,达到对受电弓主动控制,以保证在各种线路下受电弓能正常工作。
综上所述,利用本发明的受电弓动态运行性能控制方法,能够保证受电弓的受电弓动态运行性能参数得到准确控制,进而准确控制受电弓和接触网间接触力,保证弓网受电弓良好受流。
基于与图1所示的受电弓动态运行性能控制方法相同的发明构思,本申请实施例还提供了一种受电弓动态运行性能控制装置,如下面实施例所述。由于该受电弓动态运行性能控制装置解决问题的原理与受电弓动态运行性能控制方法相似,因此该受电弓动态运行性能控制装置的实施可以参见受电弓动态运行性能控制方法的实施,重复之处不再赘述。
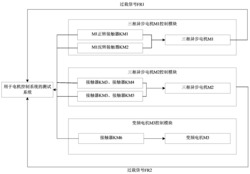
图7为本发明实施例的受电弓动态运行性能控制装置的结构示意图,如图6所示,该受电弓动态运行性能控制装置包括:空气动力学性能参数生成单元701,弓网受流性能参数生成单元702,曲线绘制单元703及性能控制单元704。
空气动力学性能参数生成单元701用于进行受电弓线路空气动力学性能试验,生成所述受电弓在不同开口方向及速度级的空气动力学性能参数;
弓网受流性能参数生成单元702用于进行受电弓弓网受流性能试验,生成所述受电弓在不同运行线路、不同开口方向及速度级的受电弓弓网受流性能参数;
曲线绘制单元703用于利用二次多项式曲线回归方法,根据所述受电弓弓网受流性能参数及空气动力学数据绘制不同速度级及不同开口方向下的弓网接触力趋势回归曲线;
性能控制单元704用于根据所述弓网接触力趋势回归曲线控制受电工的动态运行性能。
在一实施例中,如图8所示,空气动力学性能参数生成单元701包括:力传感器801及数据采集设备802。
力传感器(空气动力传感器)801设置在受电弓的工头滑板上,用于采集空气动力信号;
数据采集设备802设置在车内,用于获取所述空气动力信号,对所述空气动力信号光电转换、放大、滤波及数模转换后得到所述受电弓在不同开口方向及速度级的空气动力学数据。
在一实施例中,如图9所示,弓网受流性能参数生成单元702包括:接触力传感器901及燃弧传感器902。
接触力传感器901用于采集弓网接触力信号;接触力传感器901固定于所述受电弓工头。
燃弧传感器902用于采集燃弧信号;燃弧传感器902固定于所述受电弓底座。
数据采集设备802获取所述弓网接触力信号及燃弧信号,对所述空气动力信号光电转换、放大、滤波及数模转换后得到所述受电弓在不同开口方向及速度级的弓网接触力数据及燃弧数据。
在一实施例中,如图10所示,曲线绘制单元703包括:曲线拟合模块1001及曲线修正模块1002。
曲线拟合模块1001用于利用二次多项式曲线回归方法,根据所述弓网接触力数据拟合得到不同速度级及不同开口方向下的弓网接触力趋势回归曲线;
曲线修正模块1002用于根据所述空气动力学数据及燃弧数据对所述弓网接触力趋势回归曲线进行修正。
在一实施例中,如图11所示,性能控制单元704包括:映射模块1101及压力调节模块1102。
映射模块1101用于根据所述弓网接触力趋势回归曲线上弓网接触力数据与受电弓升弓压力的映射关系,得到受电弓主动控制曲线;
压力调节模块1102用于根据所述受电弓主动控制曲线调节受电弓升弓压力。
综上所述,利用本发明的受电弓动态运行性能控制装置,能够保证受电弓的受电弓动态运行性能参数得到准确控制,进而准确控制受电弓和接触网间接触力,保证弓网受电弓良好受流。
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品的形式。
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
本发明中应用了具体实施例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
受电弓动态运行性能控制方法及装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0