









专利摘要
本发明公开一种旋转加速度计重力梯度仪运动误差事后补偿方法,在动基座重力梯度勘探中,记录重力梯度仪的角运动、线运动,在勘探结束后,基于旋转加速度计重力梯度仪解析模型,剔除重力梯度仪输出数据中的角运动、线运动误差;使用本发明提供的事后运动误差补偿方法,在保证重力梯度仪精度不变的情况下,能够极大的降低重力梯度仪对在线误差补偿系统精度的要求,从而简化旋转加速度计重力梯度仪的电路和机械设计,使旋转加速度计重力梯度仪更简单,成本更低。
权利要求
1.一种旋转加速度计重力梯度仪运动误差事后补偿方法,其特征在于,包括以下步骤:
(1)、对旋转加速度计重力梯度仪的输出数据、线运动数据、角运动数据进行滤波,以及采样率转换,降低数据噪声,同时使旋转加速度计重力梯度仪的输出数据、线运动数据、角运动数据的采样率相同;
(2)、将勘探时间总长度为L小时的重力梯度仪的输出数据、线运动数据、角运动数据,按时间分割成N个数据块;
(3)、依次剔除N个数据块中的线运动误差、角运动误差;
(4)、将N个剔除了线运动误差、角运动误差的数据块合并,并解调,得到勘探时间长度L小时的万有引力梯度输出。
2.根据权利要求1所述的一种旋转加速度计重力梯度仪运动误差事后补偿方法,其特征在于:步骤(3)中每个数据块剔除线运动误差、角运动误差的方法相同。
3.根据权利要求2所述的一种旋转加速度计重力梯度仪运动误差事后补偿方法,其特征在于:步骤(3)中每个数据块剔除线运动误差、角运动误差的步骤如下:
(3-1)根据下式,计算数据块所有时刻的线运动向量、角运动向量:
式中t表示数据块的时间,L
(3-2)将数据块所有时刻的线运动向量、角运动向量,代入下式计算数据块的运动矩阵L:
式中t
(3-3)根据下式,标定数据块的线运动误差系数向量C
[C
式中G
(3-4)将标定的线运动误差系数向量C
说明书
技术领域
本发明涉及一种旋转加速度计重力梯度仪运动误差事后补偿方法,属于精密测量技术领域。
背景技术
动基座重力梯度勘探是一种低成本、高效率的重力梯度勘探方法;是目前世界上最先进的重力场勘探方式。重力梯度数据广泛应用于地质分析、重力场建模、高精度导航、资源勘探等。重力梯度仪具有极其重要的国防、民用、科研价值。目前国内外在研的重力梯度仪主要有冷原子重力梯度仪、超导重力梯度仪、MEMS重力梯度仪等。国外已经投入商业应用的重力梯度仪主要有旋转加速度计重力梯度仪及超导加速度计重力梯度仪。我国的重力梯度仪样机正处于研制中。
在动基座重力梯度勘探时,由于重力梯度仪内部的加速度计存在安装误差、加速度计一阶、高阶标度系数不匹配、电路增益不匹配等,导致重力梯度仪的加速度,角速度,角加速度传递到重力梯度仪的输出,造成测量误差。旋转加速度计重力梯度仪在线误差补偿,它的补偿电路和机械设计复杂,且只能在一定程度上抑制重力梯度仪线运动、角运动误差,残余的重力梯度仪线运动误差、角运动误差,严重影响重力梯度仪的测量精度,需要进行事后误差补偿。目前没有关于旋转加速度计重力梯度仪运动误差事后补偿方法的公开报道。
发明内容
本发明提供一种高精度旋转加速度计重力梯度仪运动误差事后补偿方法,该方法基于旋转加速度计重力梯度仪解析模型,它能够快速标定重力梯度仪运动误差系数,剔除重力梯度仪线运动、角运动引起的误差。在保证重力梯度仪分辨率不变的情况下,使用该方法进行事后补偿,能极大的降低重力梯度仪对在线误差补偿系统的精度要求,简化在线误差补偿系统的设计,从而简化重力梯度仪的电路、机械设计。本发明同时提供一种具有以上效果、解决了以上问题的旋转加速度计重力梯度仪运动误差事后补偿方法。
为达到上述目的,本发明采用的方法是:一种旋转加速度计重力梯度仪运动误差事后补偿方法,包括以下步骤:
(1)根据下述方式,对旋转加速度计重力梯度仪的输出数据、线运动数据、角运动数据作预处理;
对旋转加速度计重力梯度仪的输出数据、线运动数据、角运动数据进行滤波,以及采样率转换,降低数据噪声,同时使旋转加速度计重力梯度仪的输出数据、线运动数据、角运动数据的采样率相同;将勘探时间总长度为L小时的重力梯度仪的输出数据、线运动数据、角运动数据,按时间分割成N个数据块,每个数据块的时间长度可以不同;
(2)依次剔除N个数据块中的线运动误差、角运动误差,每个数据块剔除线运动误差、角运动误差的方法相同,每个数据块剔除线运动误差、角运动误差的步骤如下:
a根据下式,计算数据块所有时刻的线运动向量、角运动向量:
式中t表示数据块的时间,Lm(t)表示数据块中,时刻t的线运动向量,La(t)表示数据块中,时刻t的角运动向量,ax(t),ay(t),az(t)表示数据块中,时刻t的线运动数据,ωx(t),ωy(t),ωz(t),ωax(t),ωay(t),ωaz(t)表示数据块中,时刻t的角运动数据,Ω表示旋转加速度计重力梯度仪旋转圆盘角频率;
b将数据块所有时刻的线运动向量、角运动向量,代入下式计算数据块的运动矩阵L:
式中t1表示数据块的起始时刻,Lm(t1)表示数据块起始时刻t1的线运动向量,La(t1)表示数据块起始时刻t1的角运动向量;Lm(t)表示数据块中,时刻t的线运动向量,La(t)表示数据块中,时刻t的角运动向量;tp表示数据块的结束时刻,Lm(tp)表示数据块的结束时刻tp的线运动向量,La(tp)表示数据块结束时刻tp的角运动向量;c根据下式,标定数据块的线运动误差系数向量Cm和角运动误差系数向量CA,Cm是1×10向量,CA是1×8向量:
[Cm,CA]=Gout·L+
式中Gout是旋转加速度计重力梯度仪输出数据块,L+表示L矩阵的加号逆;
d将标定的线运动误差系数向量Cm和角运动误差系数向量CA代入下式,剔除重力梯度仪线运动、角运动误差:
表示剔除了线运动误差、角运动误差的旋转加速度计重力梯度仪输出数据块,
L是步骤b中计算的数据块的运动矩阵;
(3)将N个剔除了线运动误差、角运动误差的数据块合并,并解调,得到勘探时间长度L小时的万有引力梯度输出。
本发明与现有技术相比,具有以下优点:
本发明是首次给出旋转加速度计重力梯度仪运动误差事后补偿方法,它在重力梯度勘探中,记录重力梯度仪的线运动、角运动,在重力梯度勘探结束后,剔除重力梯度仪输出数据中的线运动、角运动误差。该运动误差事后补偿方法基于重力梯度仪高精度解析模型,它能够从超低信噪比的重力梯度仪原始数据中,剔除重力梯度仪线运动、角运动误差,提取万有引力梯度信号,它能够极大的降低重力梯度仪对在线误差补偿系统精度的要求,简化重力梯度仪的电路、机械设计,同时使重力梯度仪,能够适应更加恶劣的动态环境。
附图说明
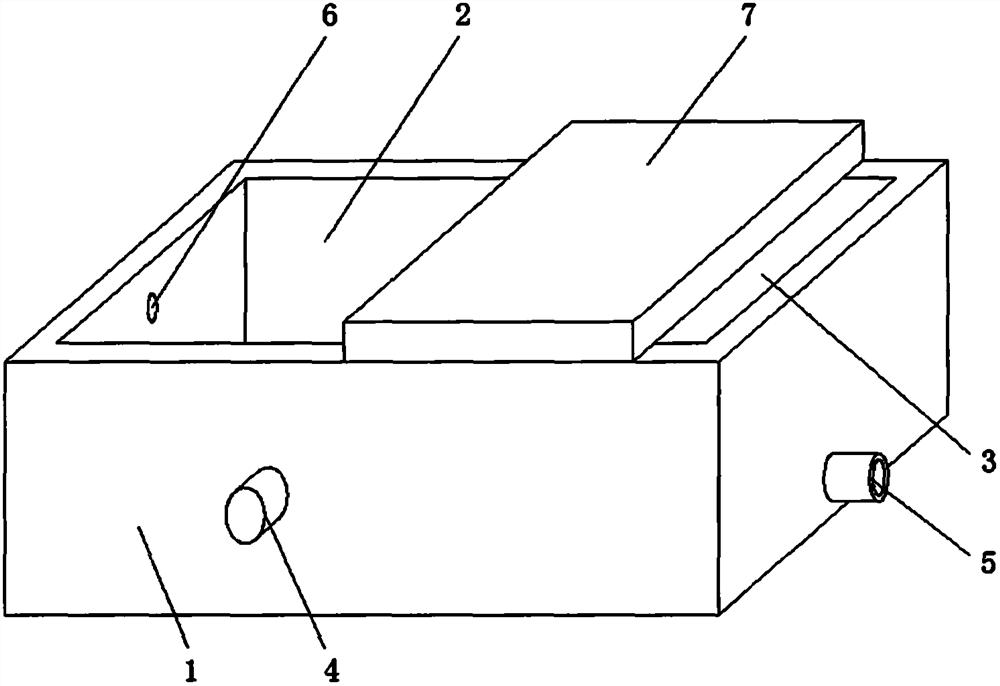
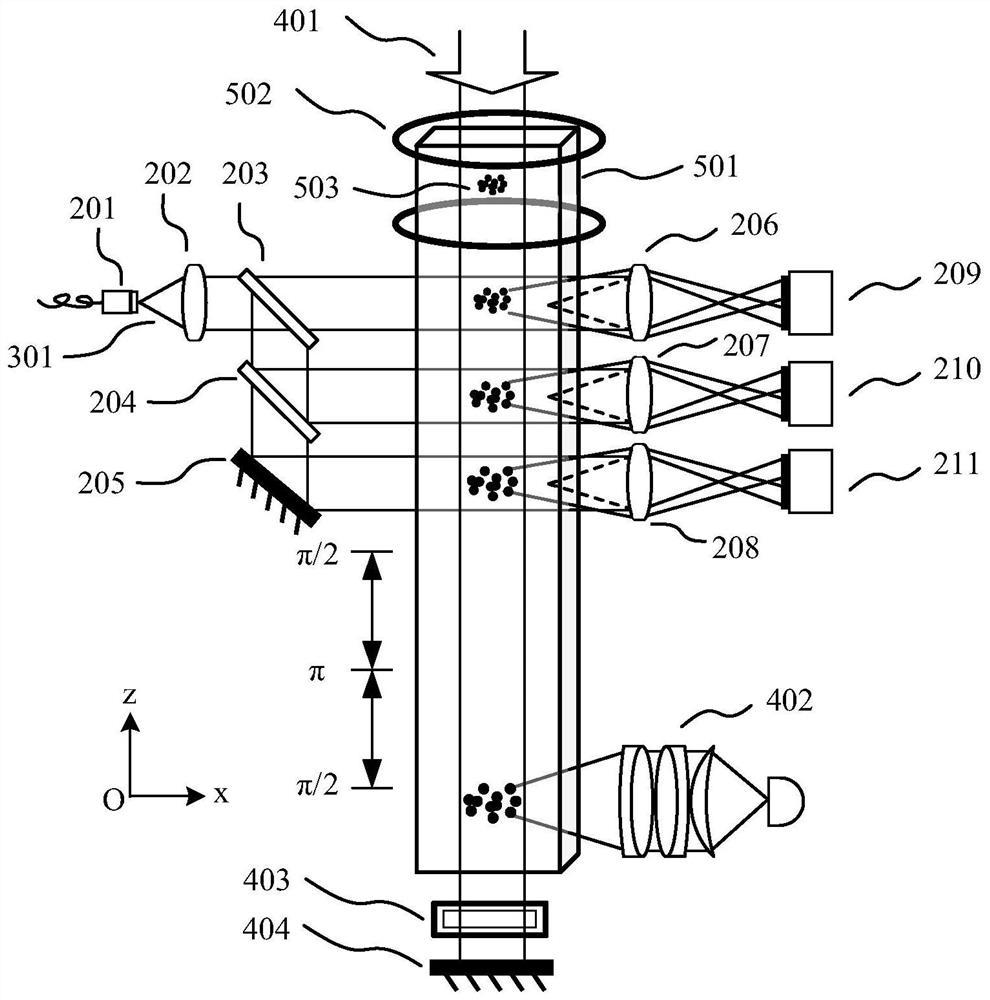
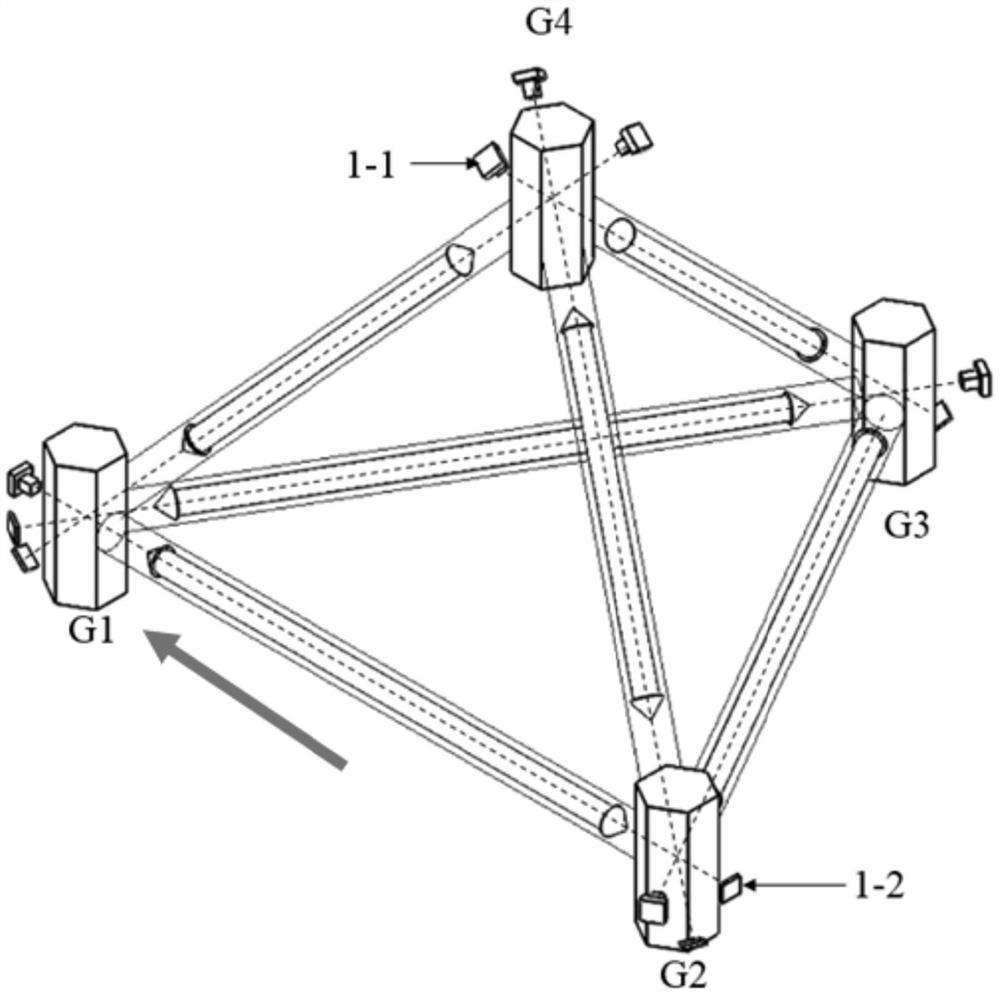
图1为重力梯度仪角运动、线运动传感器安装示意图;
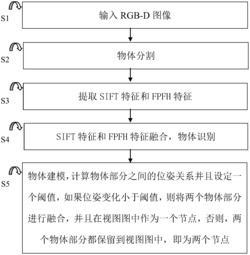
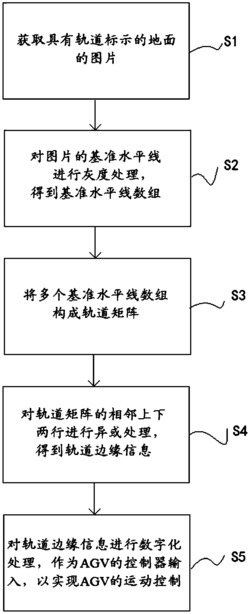
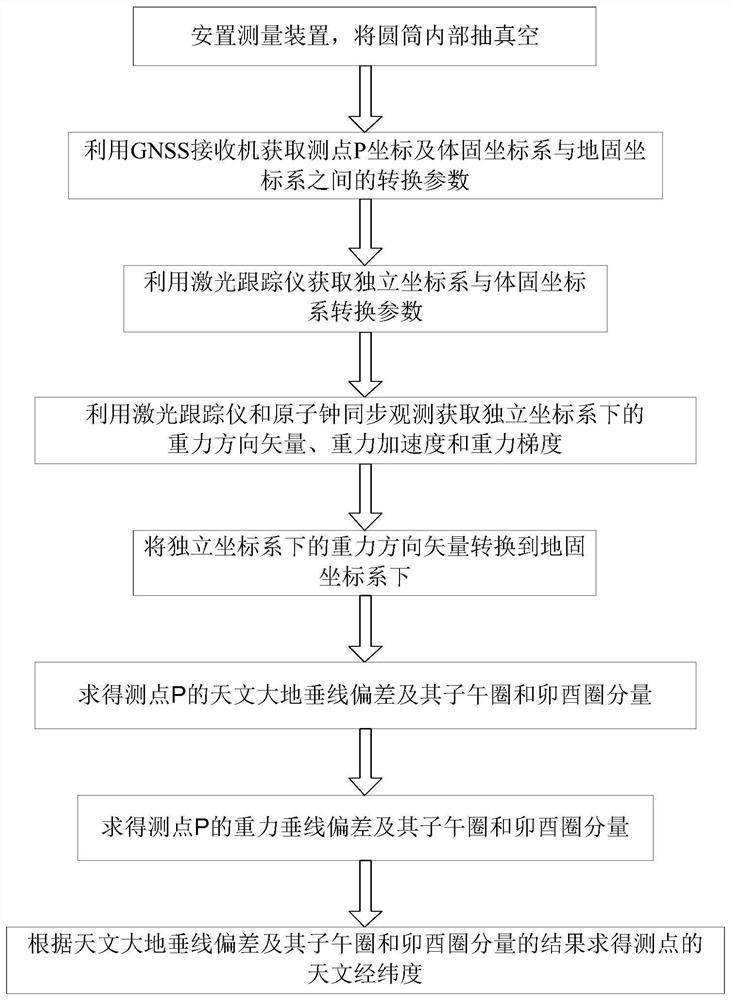
图2为本发明事后运动误差补偿流程图;
图3是旋转加速度计重力梯度仪的原始输出图;
图4是经过事后运动误差补偿,剔除了重力梯度仪线运动、角运动误差的重力梯度仪的输出
图5是剔除了重力梯度仪线运动、角运动的重力梯度仪的输出解调恢复的万有引力梯度,与理论万有引力梯度的对比图。
具体实施方式
下面结合实施例和说明书附图对本发明作进一步地说明。
如图1所示,A1,A2,A3,A4是旋转加速度计重力梯度仪上安装的四只加速度计,是万有引力梯度敏感元件;重力梯度仪测量坐标系的原点位于圆盘中心,xm是重力梯度仪测量坐标系的x轴,ym是重力梯度仪测量坐标系的y轴,zm是重力梯度仪测量坐标系的z轴;在重力梯度仪旋转圆盘中心点安装一只三轴加速度计,重力梯度勘探时,用于记录重力梯度仪经历的线运动;在重力梯度仪测量坐标系的三个坐标轴分别安装陀螺仪,重力梯度勘探时,记录重力梯度仪经历的角运动(角速度,角加速度)。
如图2所示,旋转加速度计重力梯度仪运动误差事后补偿方法,包括以下步骤:
对旋转加速度计重力梯度仪的输出数据、线运动数据、角运动数据作预处理:主要包括滤波降低数据噪声,采样率转换,使旋转加速度计重力梯度仪的输出数据、线运动数据、角运动数据的采样率相同;航空重力梯度勘探的时间长度可以高达7~8个小时,在整个勘探过程中,重力梯度仪线运动误差系数向量、角运动误差系数向量会随着时间缓慢变化,但在较短的时间段内,可以视为不变;为了提高事后误差补偿的精度,可以根据重力梯度仪的特性,将重力梯度仪的输出数据、线运动数据、角运动数据,按时间分割成N个数据块。比如航空重力梯度勘探的总时间长度为8小时,可以将重力梯度仪的输出数据、线运动数据、角运动数据分割成8个连续的数据块,每个数据块的时间长度为1小时。
依次剔除8个数据块中的线运动误差、角运动误差,每个数据块剔除线运动误差、角运动误差的方法相同,剔除线运动误差、角运动误差的步骤如下:
a根据下式,计算数据块所有时刻的线运动向量、角运动向量:
式中t表示数据块的时间,Lm(t)表示数据块中,时刻t的线运动向量,La(t)表示数据块中,时刻t的角运动向量,ax(t),ay(t),az(t)表示数据块中,时刻t的线运动数据,ωx(t),ωy(t),ωz(t),ωax(t),ωay(t),ωaz(t)表示数据块中,时刻t的角运动数据,
Ω表示旋转加速度计重力梯度仪旋转圆盘角频率;
b将数据块所有时刻的线运动向量、角运动向量,代入下式计算数据块的运动矩阵L:
式中t1表示数据块的起始时刻,Lm(t1)表示数据块起始时刻t1的线运动向量,La(t1)表示数据块起始时刻t1的角运动向量;Lm(t)表示数据块中,时刻t的线运动向量,La(t)表示数据块中,时刻t的角运动向量;tp表示数据块的结束时刻,Lm(tp)表示数据块的结束时刻tp的线运动向量,La(tp)表示数据块结束时刻tp的角运动向量;c根据下式,标定数据块的线运动误差系数向量Cm和角运动误差系数向量CA,Cm是1×10向量,CA是1×8向量:
[Cm,CA]=Gout·L+
式中Gout是旋转加速度计重力梯度仪输出数据块,L+表示L矩阵的加号逆;
d将标定的线运动误差系数向量Cm和角运动误差系数向量CA代入下式,剔除重力梯度仪线运动、角运动误差:
表示剔除了线运动误差、角运动误差的旋转加速度计重力梯度仪输出数据块,
L是步骤b中计算的数据块的运动矩阵;
将8个剔除了线运动误差、角运动误差的数据块合并,并解调,得到8小时勘探的万有引力梯度输出。
为了对本发明实施例中的方案进行验证,可以进行如下仿真分析:
如图1所示,在重力梯度仪测量坐标系的x,y,z轴安装陀螺仪,测量重力梯度仪角运动;在重力梯度仪旋转圆盘中心安装三轴加速度计,记录重力梯度仪受到的加速度。将旋转加速度计重力梯度仪安装在振动测试台,振动台对重力梯度仪施加随机的线振动和角振动,同时将一个测试质量绕重力梯度仪旋转产生多频率万有引力梯度信号激励重力梯度仪,模拟航空重力梯度勘探的情况;这里利用旋转加速度计重力梯度仪数字模型,模拟上述过程。仿真的旋转加速度计重力梯度仪的圆盘半径R=0.1m,圆盘旋转角频率Ω=1.57rad/s,旋转加速度计重力梯度仪加速度计模型参数、加速度计安装参数、加速度计放大电路参数列出在下表:
测试质量480Kg,在重力梯度仪测量坐标系的初始位置为(1.5,0,0),绕重力梯度仪的旋转角速度为ω(t)=3600+360sin(0.0628t)deg/h。给重力梯度仪施加线振动,模拟航空勘探的紊流作用,线振动加速度服从高斯分布,垂直方向的线振动加速度均值为0.1g,标准差为0.02g;水平方向的线振动的强度是垂直方向的15%;同时,给重力梯度仪的三个方向施加相同强度的高斯角振动,角振动均值等于100deg/h,标准差等于50deg/h。图3是旋转加速度计重力梯度仪的原始输出,它是重力梯度仪线运动、角运动、万有引力梯度共同激励的输出,图4是经过事后运动误差补偿,剔除了重力梯度仪线运动、角运动误差的重力梯度仪的输出,它仅由万有引力梯度激励。图5是剔除了重力梯度仪线运动、角运动的重力梯度仪的输出解调恢复的万有引力梯度,与理论万有引力梯度的对比图;图中Γinline,Γcross是理论万有引力梯度,estΓinline,estΓcross是剔除了重力梯度仪线运动、角运动的重力梯度仪的输出解调恢复的万有引力梯度。从图中可以看出,恢复的万有引力梯度与理论万有引力梯度一致。仿真实验中,给重力梯度仪施加的紊流量级在200mg,角速度量级在10-4~10-3rad/s,角加速度量级10-3~10-2rad/s2;重力梯度仪的角运动、线运动引起的电压输出量级为105V,万有引力梯度引起的电压输出量级为10-2V,因此信噪比量级为10-7。在超低信噪比10-7,噪声比信号高千万倍的情况下,本发明提供的事后误差补偿方法,能够剔除重力梯度仪线运动、角运动误差,精确恢复万有引力梯度,仿真实验表明本发明提供的事后运动误差补偿方法,有极佳的性能。
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术上述实施例仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和等同替换,这些对本发明权利要求进行改进和等同替换后的技术方案,均落入本发明的保护范围。
一种旋转加速度计重力梯度仪运动误差事后补偿方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0