

IPC分类号 : B60K7/00I,B60G13/18I,H02K7/116I,H02K7/102I,F16F6/00I,H02K7/00I






专利摘要
一种轮毂电机兼作动力吸振器质量的电动轮系统,包括轮毂电机、车轮、制动机构、控制机构、减速机构和电磁阻尼器,其中轮毂电机兼作动力吸振器质量与电磁阻尼器构成动力吸振器。该动力吸振器既能产生主动的电磁激励力,又能产生被动的电磁阻尼力,两种阻力共同抑制垂向振动,并且轮毂电机转化为簧载质量降低了非簧载质量,因此车辆的平顺性和接地安全性得到提高。
权利要求
1.一种轮毂电机兼作动力吸振器质量的电动轮系统,包括轮毂电机、车轮、制动机构、控制机构、减速机构和电磁阻尼器,所述车轮包括轮胎(6)、轮毂(7)、轮毂轴承(8)和轮轴(9),所述电磁阻尼器设置在轮毂电机内,其特征在于:
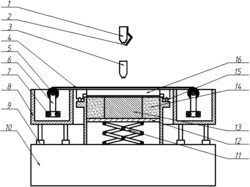
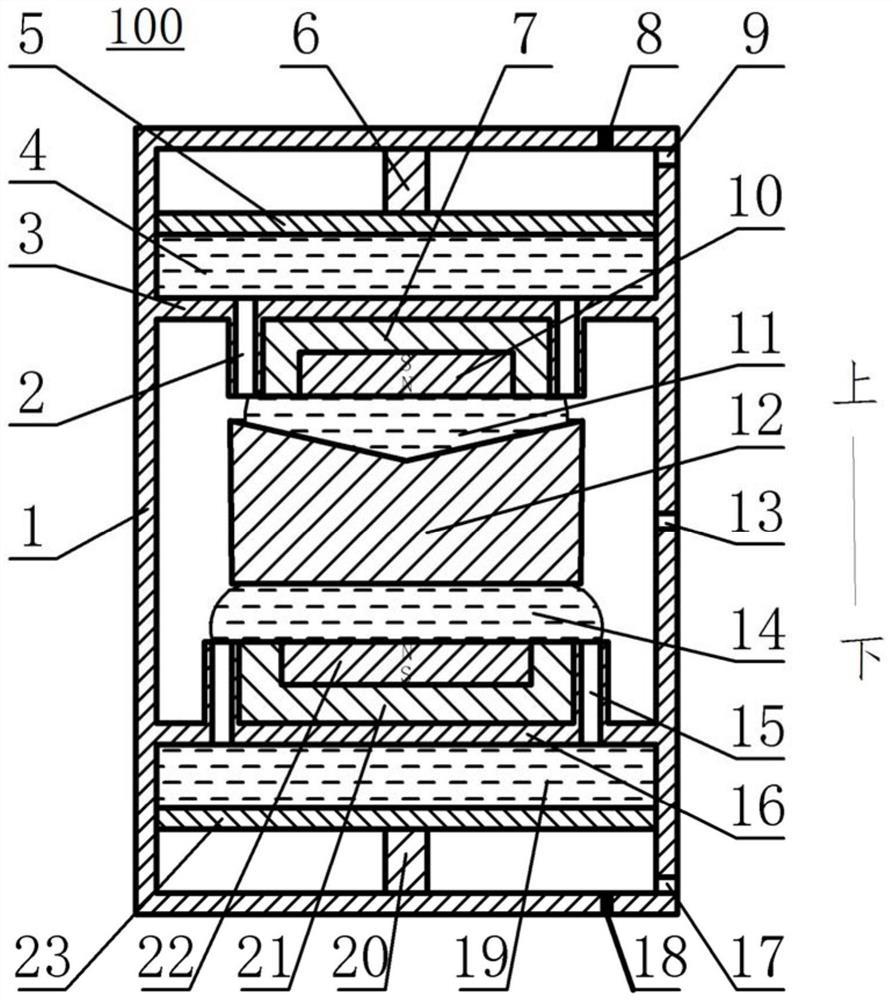
所述电磁阻尼器包括壳体(10)、上支座(11)、下支座(12)、导体(13)、绕组(14)、永磁体a(15)、永磁体b(16)、永磁体c(17)、弹簧a(18)和弹簧b(19),所述壳体(10)与轮轴(9)固定连接,上支座(11)、下支座(12)均与轮毂电机固定连接,上支座(11)与壳体(10)的顶部滑动连接结构,下支座(12)与壳体(10)的底部滑动连接;所述永磁体a(15)固定于壳体(10)内,永磁体a(15)的外侧设有导体(13),永磁体a(15)插入导体(13)内,导体(13)的顶部与上支座(11)连接,导体(13)的外侧缠有绕组(14),所述永磁体b(16)和永磁体c(17)固定在壳体(10)的内侧壁上,永磁体a(15)位于永磁体b(16)和永磁体c(17)之间,永磁体b(16)和永磁体c(17)的极性与永磁体a(15)的极性相反,所述上支座(11)和壳体(10)的底部之间连接有弹簧a(18),下支座(12)和壳体(10)之间连接有弹簧b(19),绕组(14)与控制机构连接。
2.根据权利要求1所述的轮毂电机兼作动力吸振器质量的电动轮系统,其特征在于:所述壳体(10)的内侧壁设有竖直滑道a(22),对应的在上支座(11)上设有凸块a(20),凸块a(20)设置在竖直滑道a(22)内,且沿竖直滑道a(22)上下滑动;所述壳体(10)的外侧壁设有竖直滑道b(23),对应的在下支座(12)的内表面设有凸块b(21),凸块b(21)设置在竖直滑道b(23)内,且沿竖直滑道b(23)上下滑动。
3.根据权利要求1所述的轮毂电机兼作动力吸振器质量的电动轮系统,其特征在于:所述控制机构包括电子控制器27、位移传感器a(28)、加速度传感器a(29)、位移传感器b(30)、加速度传感器b(31)、位移传感器c32和加速度传感器c33,位移传感器a(28)和加速度传感器a(29)固定在导体(13)的底部,位移传感器b(30)和加速度传感器b(31)设置在壳体(10)的底部,位移传感器c32和加速度传感器c33设置在车身上。
4.根据权利要求1所述的轮毂电机兼作动力吸振器质量的电动轮系统,其特征在于:所述轮胎(6)设置在轮毂(7)上,轮毂(7)通过轮毂轴承(8)支撑在轮轴(9)上,轮毂电机通过减速机构与轮毂(7)连接,轮毂电机通过制动机构与轮轴(9)连接。
5.根据权利要求4所述的轮毂电机兼作动力吸振器质量的电动轮系统,其特征在于:所述轮毂电机包括转子(1)、定子(2)、转子壳体(3)、定子壳体(4)和电机轴承(5),转子(1)位于定子(2)的外部,定子(2)的内部为中空结构,定子(2)安装在定子壳体(4)上,转子(1)安装在转子壳体(3)上,转子壳体(3)和定子壳体(4)之间通过电机轴承(5)连接。
6.根据权利要求4所述的轮毂电机兼作动力吸振器质量的电动轮系统,其特征在于:所述减速机构包括太阳轮(34)、行星轮(35)、齿圈(36)、橡胶衬套(37)和行星架(38),齿圈(36)通过橡胶衬套(37)与转子壳体(3)连接,所述齿圈(36)分别与太阳轮(34)和行星轮(35)连接,太阳轮(34)安装在轮轴(9)上并且保持静止,行星轮(35)设置在行星架(38)上,行星架(38)与轮毂(7)固定连接。
说明书
技术领域
本发明涉及电动汽车驱动领域,尤其是一种轮毂电机兼作动力吸振器质量的电动轮系统。
背景技术
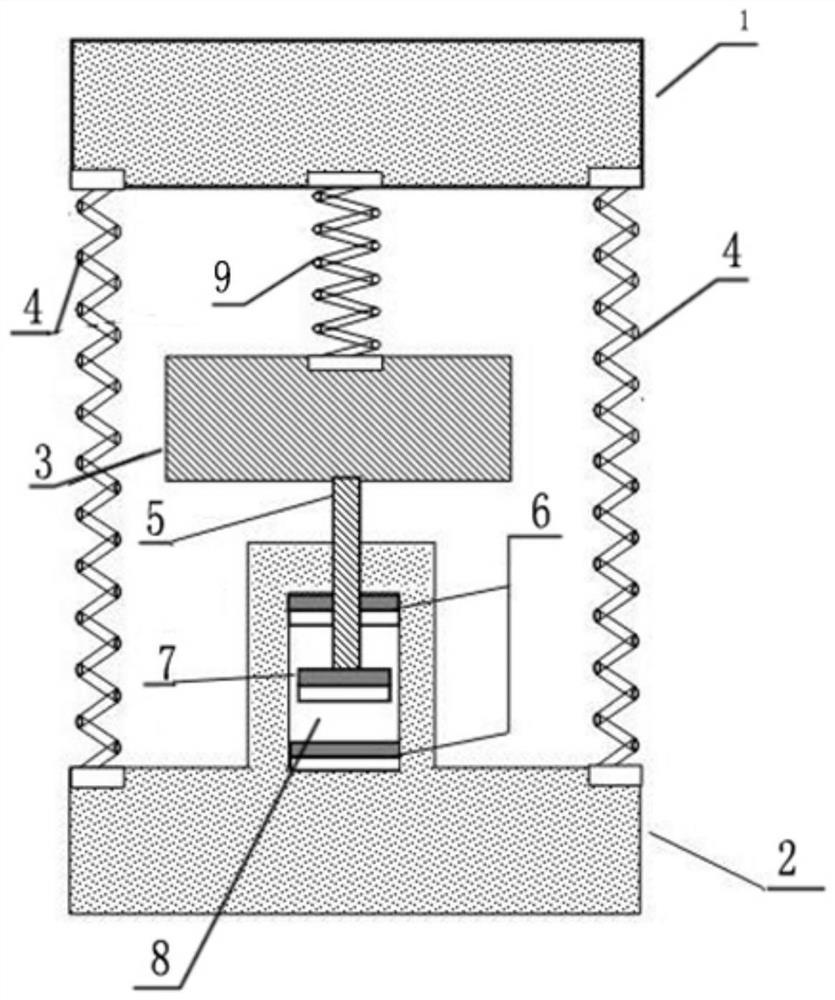
轮毂驱动电动汽车在高效节能、高集成化和驱动灵活等方面具有明显优势,然而将电机安装在车轮内部会增加车辆的非簧载质量,影响车轮接地安全性和汽车行驶平顺性。图1为现有电动汽车1/4车辆二自由度振动模型图,m1为非簧载质量,m2为簧载质量,m3为轮毂电机质量。由图可见,轮毂电机质量m3为非簧载质量,该结构车辆的非簧载质量/簧载质量的比值较大,对车辆行驶的平顺性和接地安全性有不良影响。
目前应用在轮毂电机驱动的电动轮上的减振器主要是液压减振器,液压减振器分为被动式液压减振器和阻尼可调式减振器。存在的问题主要有:液压油阻尼系数不稳定易受温度及经年变化的影响,且摩擦力大;被动式液压减振器阻尼固定不能调节,阻尼可调式减振器结构复杂、响应速度慢及成本较高等。
而磁性阻尼的优点是,具有良好的线性,不易受温度影响,没有机械接触因而避免了不必要的摩擦,响应速度快等。
经过检索现有专利发现:专利201210011165.X通过在电机和减速器壳体之间设置弹簧和阻尼元件使得电机起到动力吸振器的作用,然而该发明采用被动式阻尼器阻尼值固定致使无法选择与当前行驶状况相适应的阻尼值。专利201410524767.4在电机定子和车轮组件之间设置电磁减振装置,通过线圈电流调节电磁阻尼力实现减振的主动控制,然而该发明不仅增加了非簧载质量,而且电磁减振装置采用完全主动的控制方式能耗高,不利于电动汽车的推广发展。
发明内容
本发明的目的在于克服现有技术存在的上述缺陷,提出了一种轮毂电机兼作动力吸振器质量的电动轮系统,其中轮毂电机兼作动力吸振器质量与电磁阻尼器构成动力吸振器,该动力吸振器既能产生主动的电磁激励力,又能产生被动的电磁阻尼力,两种阻力共同抑制垂向振动,并且轮毂电机由非簧载质量转化为簧载质量,因此车辆的平顺性和接地安全性得到提高。
本发明的技术方案是:一种轮毂电机兼作动力吸振器质量的电动轮系统,包括轮毂电机、车轮、制动机构、控制机构、减速机构和电磁阻尼器,所述车轮包括轮胎、轮毂、轮毂轴承和轮轴,所述电磁阻尼器设置在轮毂电机内;
所述电磁阻尼器包括壳体、上支座、下支座、导体、绕组、永磁体a、永磁体b、永磁c、弹簧a和弹簧b,所述壳体与轮轴固定连接,上支座、下支座均与轮毂电机固定连接,上支座与壳体的顶部滑动连接结构,下支座与壳体的底部滑动连接;所述永磁体a固定于壳体内,永磁体a的外侧设有导体,永磁体a插入导体内,导体的顶部与上支座连接,导体的外侧缠有绕组,所述永磁体b和永磁体c固定在壳体的内侧壁上,永磁体a位于永磁体b和永磁体 c之间,永磁体b和永磁体c的极性与永磁体a的极性相反,所述上支座和壳体的底部之间连接有弹簧a,下支座和壳体之间连接有弹簧b,绕组与控制机构连接。
本发明中,所述壳体的内侧壁设有竖直滑道a,对应的在上支座上设有凸块a,凸块a设置在竖直滑道a内,且沿竖直滑道a上下滑动;所述壳体的外侧壁设有竖直滑道b,对应的在下支座的内表面设有凸块b,凸块b设置在竖直滑道b内,且沿竖直滑道b上下滑动。通过上述滑动连接结构,保证了电磁阻尼器只能沿滑道方向上下垂向运动。
所述控制机构包括电子控制器、位移传感器a、加速度传感器a、位移传感器b、加速度传感器b、位移传感器c和加速度传感器c,位移传感器a和加速度传感器a固定在导体的底部,位移传感器b和加速度传感器b设置在壳体的底部,位移传感器c和加速度传感器c设置在车身上。
所述轮胎设置在轮毂上,轮毂通过轮毂轴承支撑在轮轴上,轮毂内设有轮毂电机,轮毂电机通过减速机构与轮毂连接,轮毂电机通过制动机构与轮轴连接。
所述轮毂电机包括转子、定子、转子壳体、定子壳体和电机轴承,转子位于定子的外部,定子的内部为中空结构,定子安装在定子壳体上,转子安装在转子壳体上,转子壳体和定子壳体之间通过电机轴承连接。
所述制动系统包括制动盘和一对制动钳,该对制动钳包括制动钳a和制动钳b,制动钳a 和制动钳b位于同一水平线上,且对称的固定安装在轮轴上。
所述减速机构包括太阳轮、行星轮、齿圈、橡胶衬套和行星架,齿圈通过橡胶衬套与转子壳体连接,所述齿圈分别与太阳轮和行星轮连接,太阳轮安装在轮轴上并且保持静止,行星轮设置在行星架上,行星架与轮毂固定连接。齿圈输入来自轮毂电机的动力,经太阳轮和行星轮传输,由行星架输出给轮毂,从而将动力输出至车轮。
本发明的有益效果是:
(1)本发明中的动力吸振器既能产生主动的电磁激励力,又能产生被动的电磁阻尼力,可以实现更大的减振效果,并且节约电能;
(2)永磁体产生的磁性回路兼具磁性阻尼与电磁驱动器的二重性,采用这样的构造,动力吸振器的设计与主动型动力吸振器的控制设计可以单独进行;
(3)轮毂电机通过电磁阻尼器和橡胶衬套与非簧载质量(制动系统和车轮)弹性隔离从而转化为簧载质量,提高了车辆的行驶平顺性和接地安全性;
(4)电机装在车轮内部,不占用底盘空间;
(5)可以匹配多种悬架;
附图说明
图1为现有电动汽车1/4车辆二自由度振动模型图;
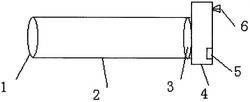
图2为本发明的主视示意图;
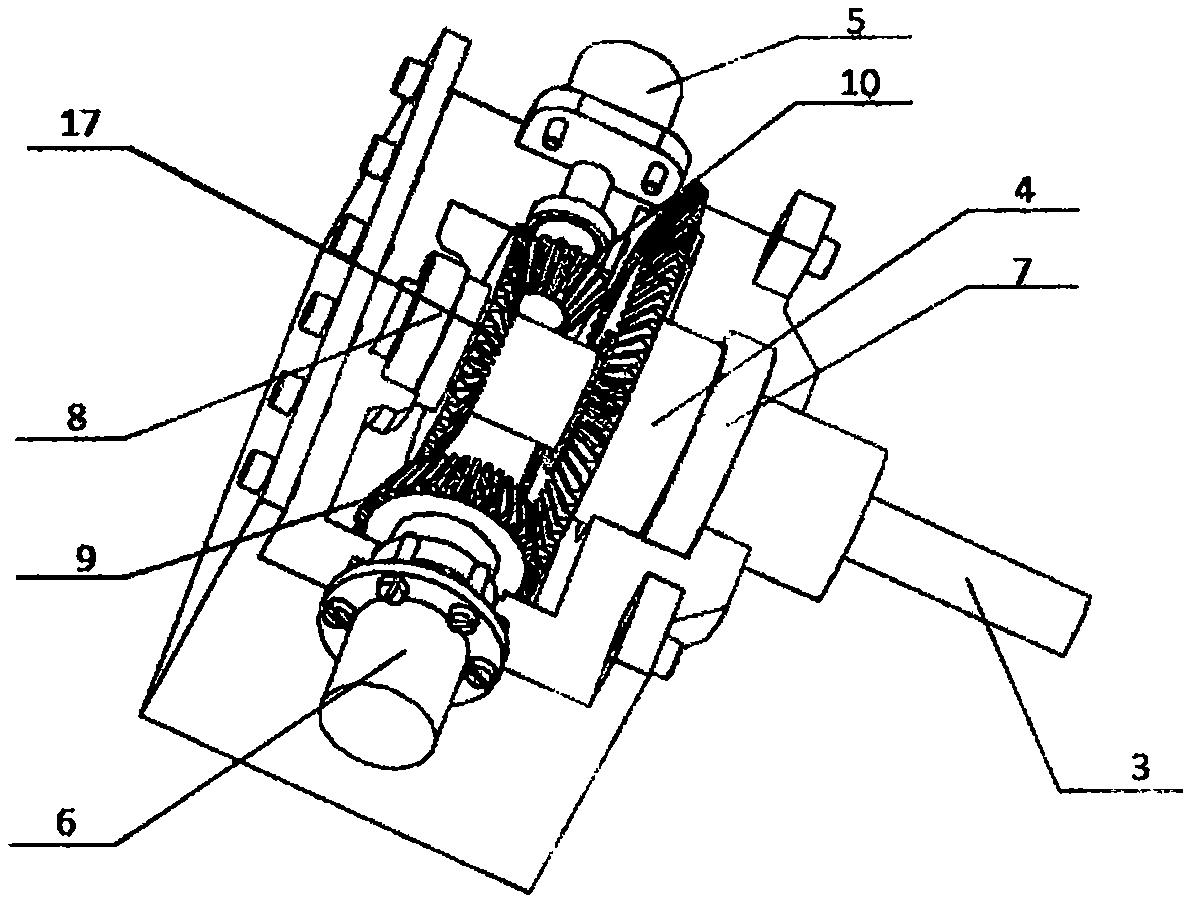
图3为本发明的俯视示意图;
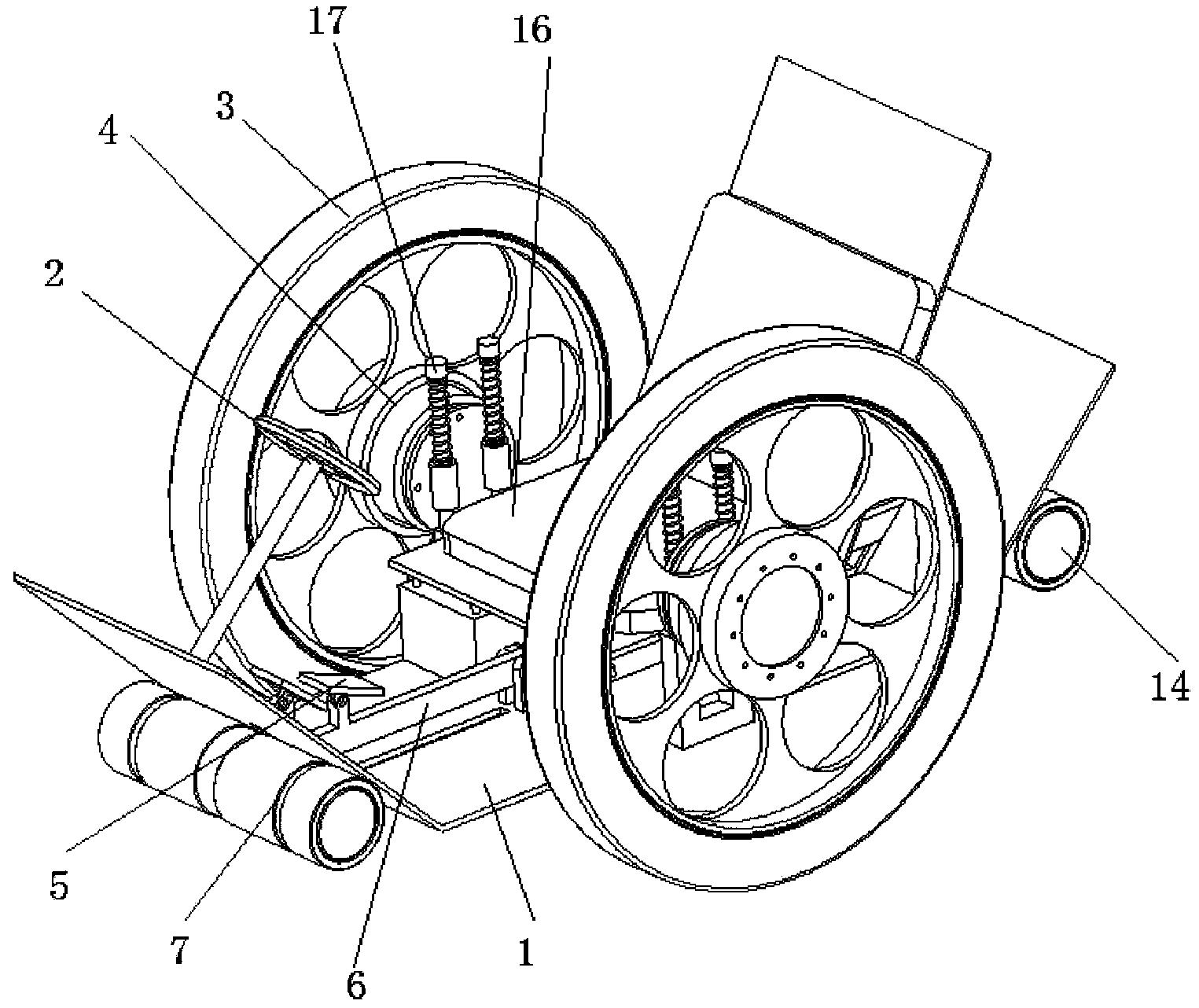
图4为本发明的侧视示意图;
图5为本发明所述轮毂电机驱动的电动汽车1/4车辆三自由度振动模型图
图中:1转子;2定子;3转子壳体;4定子壳体;5电机轴承;6轮胎;7轮毂;8轮毂轴承;9轮轴;10壳体;11上支座;12下支座;13导体;14绕组;15永磁体a;16永磁体b;17永磁体c;18弹簧a;19弹簧b;20凸块a;21凸块b;22滑道a;23滑道b;24制动盘;25制动钳a;26制动钳b;27电子控制器;28位移传感器a;29加速度传感器a;30 位移传感器b;31加速度传感器b;32位移传感器c;33加速度传感器c;34太阳轮;35行星轮;36齿圈;37橡胶衬套;38行星架;39车身。
具体实施方式
为了使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。
在以下描述中阐述了具体细节以便于充分理解本发明。但是本发明能够以多种不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广。因此本发明不受下面公开的具体实施方式的限制。
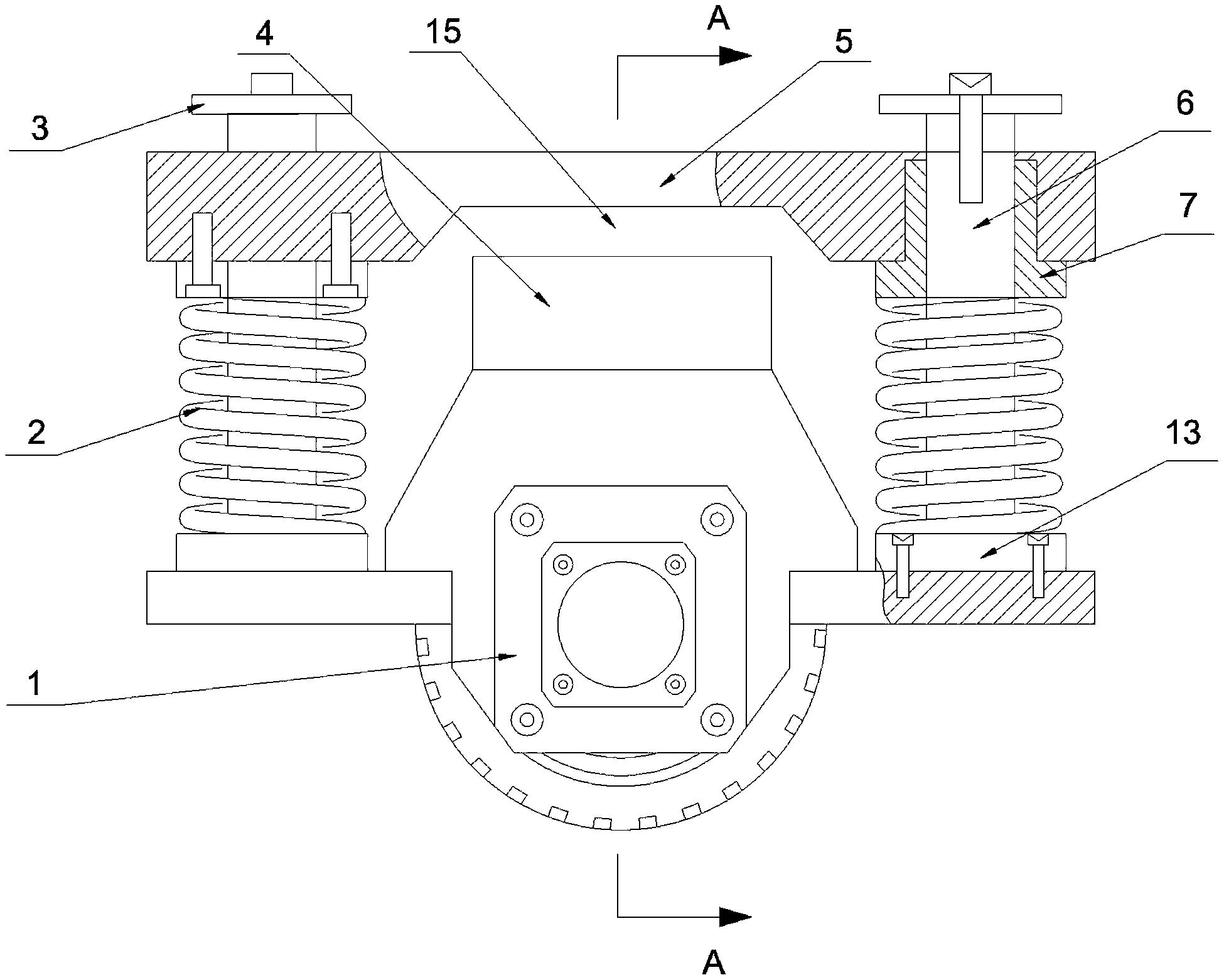
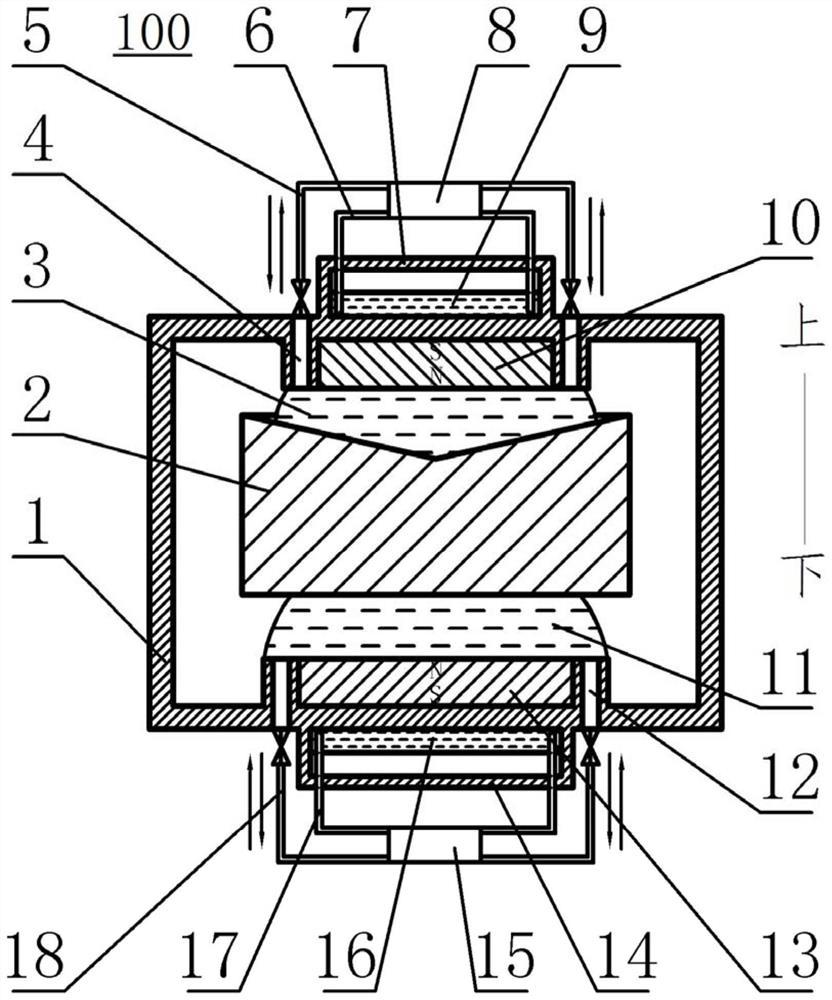
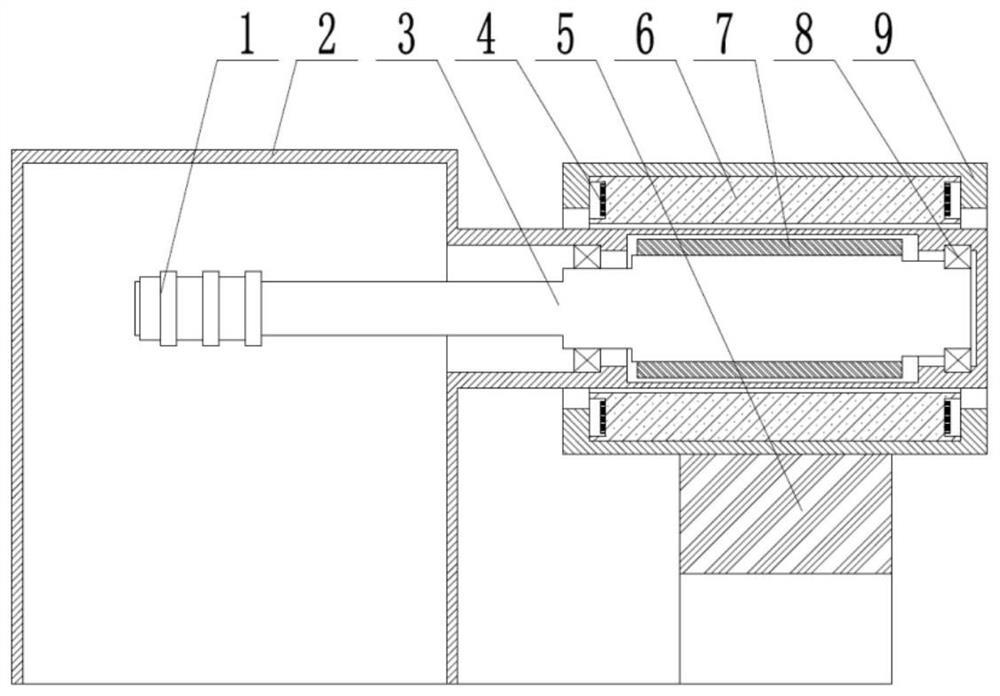
本发明,如图2到4所示,一种轮毂电机兼作动力吸振器质量的电动轮系统,包括轮毂电机、车轮、制动机构、控制机构、减速机构和电磁阻尼器。车轮包括轮胎6、轮毂7、轮毂轴承8和轮轴9,轮胎6设置在轮毂7上,轮毂7通过轮毂轴承8支撑在轮轴9上。轮毂7 内设有轮毂电机,轮毂电机通过减速机构与轮毂7连接,轮毂电机通过制动机构与轮轴9连接。电磁阻尼器包括壳体10、上支座11和下支座12,上支座11与壳体10的顶部滑动连接,上支座11与轮毂电机固定连接,下支座12与壳体10的底部滑动连接,下支座12与轮毂电机固定连接。本实施例中电磁阻尼器设置在轮毂电机内,垂直穿过轮轴9,电磁阻尼器的壳体10与轮轴9固定连接。
轮毂电机包括转子1、定子2、转子壳体3、定子壳体4和电机轴承5,电机采用外转子内定子形式,即转子1位于定子2的外部,定子2的内部为中空结构,定子2安装在定子壳体4上,转子3安装在转子壳体3上,转子壳体3和定子壳体4之间通过电机轴承5连接。
制动系统包括制动盘24和一对制动钳,如图3所示,该对制动钳包括制动钳a25和制动钳b26,制动钳a25和制动钳b26位于同一水平线上,且对称的固定安装在轮轴9上。制动时,制动钳a25、制动钳b26受控制油液作用同时挤压制动盘24产生摩擦制动力。制动盘24与转子壳体3固定连接,采用双卡钳结构的原因有两个:其一,电机内部空间有限,将制动器封装在电机内部,制动盘的摩擦路径将非常小,因此采用两个体积较小的卡钳,每个卡钳驱动较小区域的摩擦片,但两者合起来能获得所需的制动力;其二,如果使用单个卡钳,电机将承受附加弯矩,而双卡钳结构可以产生车辆制动所需的制动力偶而不产生附加弯矩。
减速机构包括太阳轮34、行星轮35、齿圈36、橡胶衬套37和行星架38。齿圈36通过橡胶衬套37与转子壳体3连接,从而保证轮毂电机和车轮之间为柔性连接。该减速机构的动力由齿圈36输入,齿圈36分别与太阳轮34和行星轮35连接,太阳轮34安装在轮轴9上并且保持静止,行星轮35设置在行星架38上,行星架38与轮毂7固定连接。齿圈36输入来自轮毂电机的动力,经太阳轮34和行星轮35传输,由行星架38输出给轮毂,从而将动力输出至车轮。
电磁阻尼器还包括导体13、绕组14、永磁体a15、永磁体b16、永磁c17、弹簧a18和弹簧b1。本实施例中,壳体10与轮轴9之间通过螺栓固定连接,上支座11、下支座12均与轮毂电机中的定子壳体4固定连接。上支座11与壳体10之间的滑动连接结构为:壳体10的内侧壁设有竖直滑道a22,对应的在上支座11上设有凸块a20,凸块a20设置在竖直滑道a22 内,且可以沿竖直滑道a22上下滑动。下支座12与壳体10之间的滑动连接结构为:壳体10 的外侧壁设有竖直滑道b23,对应的在下支座12的内表面设有凸块b21,凸块b21设置在竖直滑道b23内,且可以沿竖直滑道b23上下滑动。通过上述滑动连接结构,保证了电磁阻尼器只能沿滑道方向上下垂向运动。
永磁体a15固定于壳体10内,永磁体a15的外侧设有导体13,即永磁体a15插入导体13内,永磁体a15的极性为S极,导体13的顶部与上支座11连接,导体13的外侧缠有绕组14。永磁体b16和永磁体c17固定在壳体10的内侧壁上且极性均为N极,永磁体a15位于永磁体b16和永磁体c17之间。上支座11和壳体10的底部之间连接有弹簧a18,下支座 12和壳体10之间连接有弹簧b19,弹簧主要起支撑电机重量的作用。绕组14中的电流大小由控制机构控制。
本发明中,由于轮毂电机中的转子壳体3通过橡胶衬套37与齿圈36连接、轮毂电机定子2通过电磁阻尼器与轮轴9连接,因而轮毂电机质量从非簧载质量(车轮和制动系统)中分离出来,轮毂电机的质量不再属于非簧载质量而是转化为簧载质量,提高了车辆行驶的平顺性和接地安全性。
所述轮毂电机兼作动力吸振器质量的电动轮系统的工作原理如下所述:
轮毂电机启动后,转子1和转子壳体3随之转动,动力由转子壳体3传至减速机构的输入端齿圈36,经过行星轮35和太阳轮34,最后由行星架38输出至轮毂7,驱动车轮转动。
由兼作动力吸振器质量的轮毂电机与电磁阻尼器构成的动力吸振器的制振原理是该动力吸振器把制振对象即车轮的振动吸收过来加以增幅,并消耗在其阻尼元素中,使车轮的垂向振动减小,从而提高车辆行驶的平顺性。即,遇到不平路面时,振动由轮胎6传至轮毂7和轮轴9再传到轮毂电机,引起定子壳体4振动,从而带动与定子壳体4固定连接的上支座和下支座沿竖直滑道上下运动,导致设置在上支座上的导体13上下来回运动并切割磁感线,从而在导体13内产生涡电流,永磁体生成的磁场对该涡电流产生安培力,从而形成与导体13 运动方向相反的电磁阻力,对导体13的运动起阻尼作用消减振动,且该电磁阻尼力的大小跟磁场强度和导体13的振动速度成正比;绕组14通电时,在导体13上缠绕的绕组14构成了电磁驱动器,在磁场的作用下,绕组14在垂直方向受到安培力的作用即产生电磁激振力,控制机构随时调整绕组14中电流的大小和方向,从而调节电磁激振力的大小和方向,使得该电磁激振力方向始终与导体运动方向相反,从而抑制垂向的振动。
综上所述,本发明中的电磁阻尼器可以提供两种垂向阻力来抑制垂向振动,一种是不需要消耗电能的被动的电磁阻尼力,一种是消耗电能的可进行主动控制调节的电磁激振力。当绕组14不通电时,被动的电磁阻尼力发挥作用;当绕组14通电时,被动的电磁阻尼力和可以主动控制调节的电磁激振力共同发挥作用抑制垂向振动。
本发明中的控制机构包括电子控制器27、位移传感器a28、加速度传感器a29、位移传感器b30、加速度传感器b31、位移传感器c32和加速度传感器c33。位移传感器a28固定在导体13的底部,用于测量导体13的振动距离;位移传感器b30设置在壳体10的底部,用于测量车轮的振动距离;位移传感器c设置在车身上用于测量悬架的振动行程,加速度传感器a29固定在导体13上,用于测量导体的振动加速度,加速度传感器b31设置在壳体10的底部,用于测量车轮的振动加速度,加速度传感器c33设置在车身上用于测量车身的振动加速度。传感器的信号传递给电子控制器27,经过计算处理后控制绕组14中通电电流的大小。
评价车辆平顺性的一个重要指标是车身加速度,本发明通过加速度传感器c33测量车身的振动加速度,车身加速度作为状态反馈变量反馈到输入端与其他参考输入相加,其和作为被控系统的控制信号,从而使得车身加速度在合理范围内以保证车辆行驶的平顺性。
电子控制器27根据传感器的信号调整绕组14中电流的大小和方向从而调节电磁激振力的大小和方向,使得该电磁激振力方向始终与导体运动方向相反抑制垂向的振动。
控制机构的工作原理如下所述:
位移传感器a28测量导体13的振动距离,位移传感器b30测量车轮的振动距离,加速度传感器a29测量导体的振动加速度,加速度传感器b31测量车轮的振动加速度,输送给电子控制器27,发出指令控制绕组14中电流使其产生与导体运动方向相反的电磁激振力,缓和垂向振动。位移传感器c32测量悬架实际的振动行程,加速度传感器c33测量车身实际的振动加速度,然后反馈给电子控制器27,适时修正绕组14中电流的大小。
当电动车在凹凸不平的恶劣路面上行驶或由单人驾驶改为多人驾乘,车轮剧烈地跳动时,电子控制器27通过传感器立即感知到这一变化,于是接通绕组14的输入回路,为绕组14输入外加电流,产生电磁激振力,缓和路面的冲击与振动。输入的外加电流越大,绕组14产生的电磁激振力就越强,减振力也就越大,电子控制器27对电流的控制完全与行驶状况及路面颠簸情况相适应。电子控制器27可在1s时间内让电磁阻尼器的阻力和减振力连续改变1000 次,与单独使用弹簧液压阻尼器相比,既提高响应速度,又可提高舒适性。
图5为本发明所述轮毂电机的驱动电动汽车1/4车辆三自由度振动模型图,m1为非簧载质量,m2为簧载质量,m3为轮毂电机质量。由图可见,轮毂电机质量转化为动力吸振器质量,并且电磁阻尼器可以根据m1和m2的振动情况调节阻尼值,以实现最大的减振效果。
本发明中,兼作动力吸振器质量的轮毂电机与电磁阻尼器构成动力吸振器,该电磁阻尼器可以提供两种垂向阻力来抑制垂向振动,一种是不需要消耗电能的被动的电磁阻尼力,一种是消耗电能的可进行主动控制调节的电磁激振力。当绕组不通电时,被动的电磁阻尼力发挥作用;当绕组通电时,被动的电磁阻尼力和可以主动控制调节的电磁激振力共同发挥作用抑制垂向振动。并且,轮毂电机转化为簧载质量降低了非簧载质量,因此车辆的平顺性和接地安全性得到提高。
以上对本发明所提供的轮毂电机兼作动力吸振器质量的电动轮系统进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
一种轮毂电机兼作动力吸振器质量的电动轮系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0