








专利摘要
本实用新型提供了一种基于临近空间浮空平台的信息获取系统,包括临近空间浮空平台、投放装置、多个微型无人机及卫星,临近空间浮空平台用于携带投放装置至指定位置;投放装置用于承载多个微型无人机,投放装置还用于到达指定位置后投放多个微型无人机;多个微型无人机用于分别着陆至地面目标的周围位置后,进行信息采集,并将采集的信息发送至卫星。本实用新型采用的临近空间浮空平台具有较强的载荷能力,并能准确、隐蔽地投放无人机至目标地点周围,微型无人机能可靠地进行信息采集和传输。
权利要求
1.一种基于临近空间浮空平台的信息获取系统,其特征在于,系统包括临近空间浮空平台、投放装置、多个微型无人机及卫星,所述多个微型无人机与所述卫星通信连接,所述多个微型无人机设于投放装置中,所述投放装置与所述临近空间浮空平台机械连接,其中,
所述临近空间浮空平台用于携带所述投放装置至指定位置;
所述投放装置用于承载所述多个微型无人机,所述投放装置还用于到达指定位置后投放所述多个微型无人机;
所述多个微型无人机用于分别着陆至地面目标的周围位置后,进行信息采集,并将采集的信息发送至所述卫星。
2.根据权利要求1所述的基于临近空间浮空平台的信息获取系统,其特征在于,所述指定位置包括距离地面目标一水平距离的水平位置,及距离地面目标一垂直距离的垂直位置;所述投放装置以所述垂直位置为高度、以所述地面目标为圆心、以所述水平位置为半径,对所述多个微型无人机进行分别投放,以使所述多个微型无人机分别着陆至地面目标的周围位置。
3.根据权利要求2所述的基于临近空间浮空平台的信息获取系统,其特征在于,所述垂直位置距离地面目标的垂直距离大于20km。
4.根据权利要求1所述的基于临近空间浮空平台的信息获取系统,其特征在于,所述投放装置通过柔性细缆悬挂于临近空间浮空平台下部。
5.根据权利要求1所述的基于临近空间浮空平台的信息获取系统,其特征在于,所述微型无人机上设置有飞行控制系统、传感器及通信设备,其中:
所述飞行控制系统用于在所述微型无人机被投放后,控制所述微型无人机飞行至地面目标的周围位置;
所述传感器用于进行信息采集;
所述通信设备用于与卫星通信,以将采集的信息发送至所述卫星。
6.根据权利要求5所述的基于临近空间浮空平台的信息获取系统,其特征在于,所述微型无人机的机体为一印刷电路板,所述飞行控制系统、传感器及通信设备集成在所述印刷电路板上。
7.根据权利要求6所述的基于临近空间浮空平台的信息获取系统,其特征在于,所述微型无人机还包括一能源电池,用于对所述印刷电路板进行供电,所述能源电池上粘贴有保温电阻片。
8.根据权利要求7所述的基于临近空间浮空平台的信息获取系统,其特征在于,所述微型无人机还包括一自毁装置,用于在所述能源电池耗尽后,对所述印刷电路板进行摧毁。
9.根据权利要求5所述的基于临近空间浮空平台的信息获取系统,其特征在于,所述传感器为声音传感器、震动传感器和磁力传感器中的一种或多种。
10.根据权利要求1所述的基于临近空间浮空平台的信息获取系统,所述临近空间浮空平台为高空气球、超压气球、平流层飞艇中的一种。
说明书
技术领域
本实用新型属于无人机领域,尤其涉及一种基于临近空间浮空平台的信息获取系统。
背景技术
21世纪战争的重点是信息战。信息战争的核心是围绕信息的获取权、控制权和使用权。在信息化战场上,信息成为主导和支配战场的关键要素,作战决策靠信息,指挥控制依赖信息,精确打击需要信息。本实用新型的目的是研制一种切实可用又安全可靠的信息获取方法。
无人机(Unmanned Aerial Vehicle,UAV)是战时信息获取的主要渠道之一,通过在敌方控制区内长时间的监视飞行,可以准确地获取地面图像资料供我军决策,是一种理想的战略武器平台。目前执行这类信息获取任务的无人机往往具有超高空、长航时的特点,这些特点也是无人机研发中的瓶颈问题,是很难在短时间内得到完美解决的症结,并且这种无人机造价往往很高,一旦被敌方击落无疑将是重大的损失。
另外一种现有技术采用用后即弃型隐蔽式自主飞行小型无人机(Close-in Covert Autonomous Disposable Aircraft,CICADA),如图1所示,使用时将两架CICADA分别挂载于Tempest无人机机翼下部,利用气象气球(Weather Balloon,WB)携带Tempest无人机升空,到达一定高度后释放Tempest无人机,飞行一段距离后,CICADA脱离Tempest无人机滑翔飞入敌军后方,通过机上携带的传感器获取信息并通过Tempest无人机将信息转发给卫星。上述方案具有如下缺点:
(1)利用气象气球作为母平台,其载荷能力有限,严重制约了信息获取类载荷的挂载数量;
(2)气象气球在发放后只能随风漂浮,无法保持高度,因此无法利用自然风飞向目标点;
(3)利用Tempest无人机飞入敌占区进行信息获取无人机的投放,隐蔽性较差,易被敌方雷达探测进而击落;
(4)用于执行信息获取任务的无人机数量过少,在被敌方发现或部件失效情况下易导致任务失败;
(5)信息传输链依赖Tempest无人机,无人机被击落或失效都将导致任务失败。
实用新型内容
(一)要解决的技术问题
鉴于上述问题,本实用新型的目的在于提供一种基于临近空间浮空平台的信息获取系统,具有较强的载荷能力,能准确、隐蔽地投放无人机至目标地点周围,并能可靠地进行信息采集和传输。
(二)技术方案
本实用新型提供一种基于临近空间浮空平台的信息获取系统,系统包括临近空间浮空平台、投放装置、多个微型无人机及卫星,多个微型无人机与卫星通信连接,多个微型无人机设于投放装置中,投放装置与临近空间浮空平台机械连接,其中,
临近空间浮空平台用于携带投放装置至指定位置;
投放装置用于承载多个微型无人机,投放装置还用于到达指定位置后投放多个微型无人机;
多个微型无人机用于分别着陆至地面目标的周围位置后,进行信息采集,并将采集的信息发送至卫星。
进一步,指定位置包括距离地面目标一水平距离的水平位置,及距离地面目标一垂直距离的垂直位置;投放装置以垂直位置为高度、以地面目标为圆心、以水平位置为半径,对多个微型无人机进行分别投放,以使多个微型无人机分别着陆至地面目标的周围位置。
进一步,垂直位置距离地面目标的垂直距离大于20km。
进一步,投放装置通过柔性细缆悬挂于临近空间浮空平台下部。
进一步,微型无人机上设置有飞行控制系统、传感器及通信设备,其中:
飞行控制系统用于在所述微型无人机被投放后,控制微型无人机飞行至地面目标的周围位置;
传感器用于进行信息采集;
通信设备用于与卫星通信,以将采集的信息发送至卫星。
进一步,微型无人机的机体为一印刷电路板,飞行控制系统、传感器及通信设备集成在印刷电路板上。
进一步,微型无人机还包括一能源电池,用于对印刷电路板进行供电,能源电池上粘贴有保温电阻片。
进一步,微型无人机还包括一自毁装置,用于在能源电池耗尽后,对印刷电路板进行摧毁。
进一步,传感器为声音传感器、震动传感器和磁力传感器中的一种或多种。
进一步,临近空间浮空平台为高空气球、超压气球、平流层飞艇中的一种。
(三)有益效果
本实用新型提供的基于临近空间浮空平台的信息获取系统,具有以下优点:
(1)本实用新型使用临近空间浮空平台作为母平台,其载荷能力显著提升,可以携带更多微型无人机,提高了任务的成功概率;
(2)本实用新型中使用的临近空间浮空平台具有自主控制能力,可以稳定在某一高度上,利用风的作用飞向目标点;
(3)本实用新型中使用临近空间浮空平台直接投放微型无人机,高隐蔽性的浮空平台与微型无人机的组合提高了系统的隐蔽性及安全性;
(4)本实用新型中使用临近空间浮空平台成批次播撒式投放信息获取无人机,无人机数量多、分布区域广,敌方很难将所有无人机拔除,提高了任务的成功概率;
(5)本实用新型中微型无人机与卫星直接通信,简化了信息传输链路,提高了信息传输的安全性与可靠性。
附图说明
图1是现有技术中信息获取的示意图。
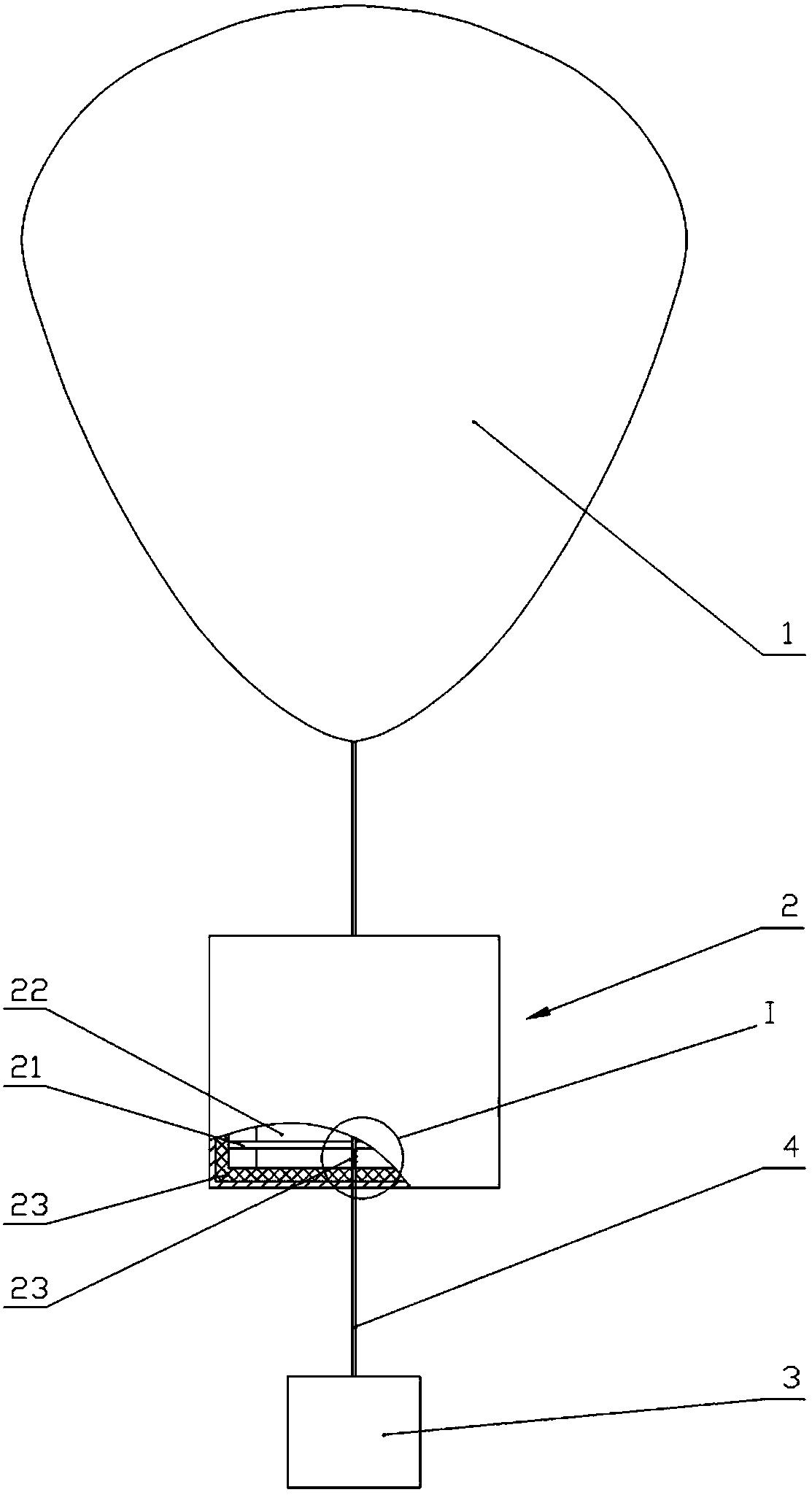
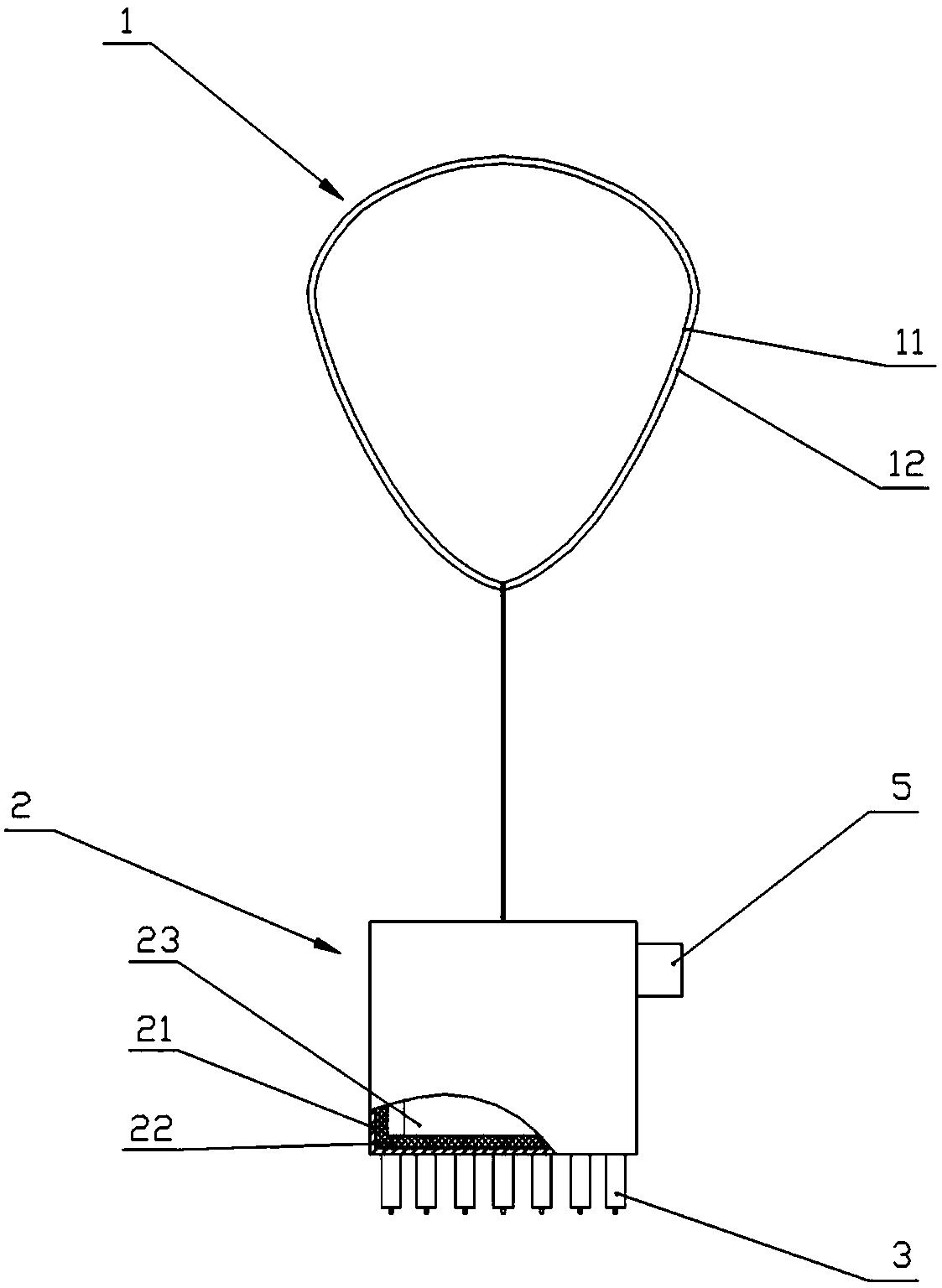
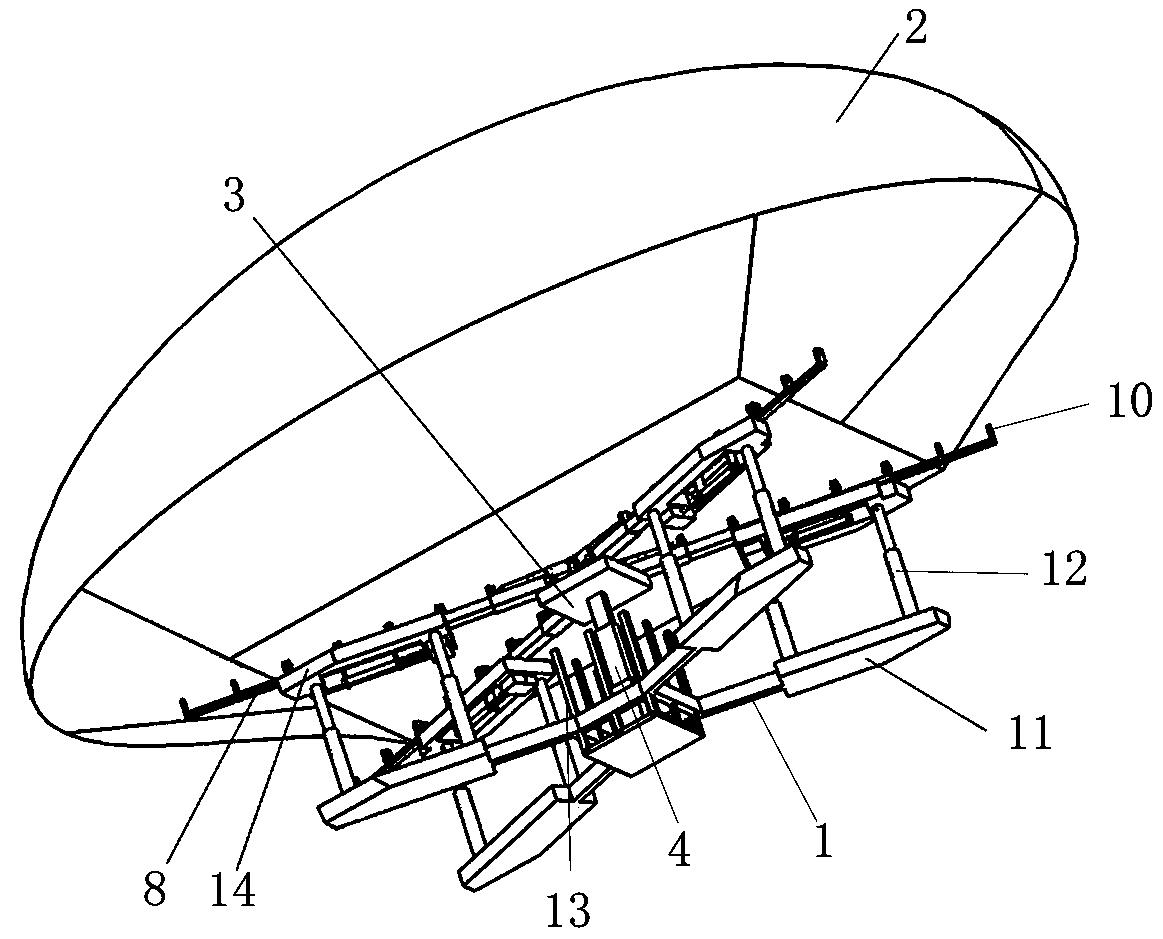
图2是本实用新型提供的信息获取系统的结构示意图。
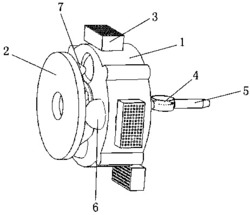
图3是本实用新型提供的微型无人机的结构示意图。
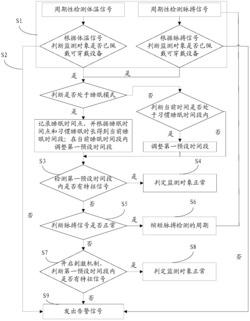
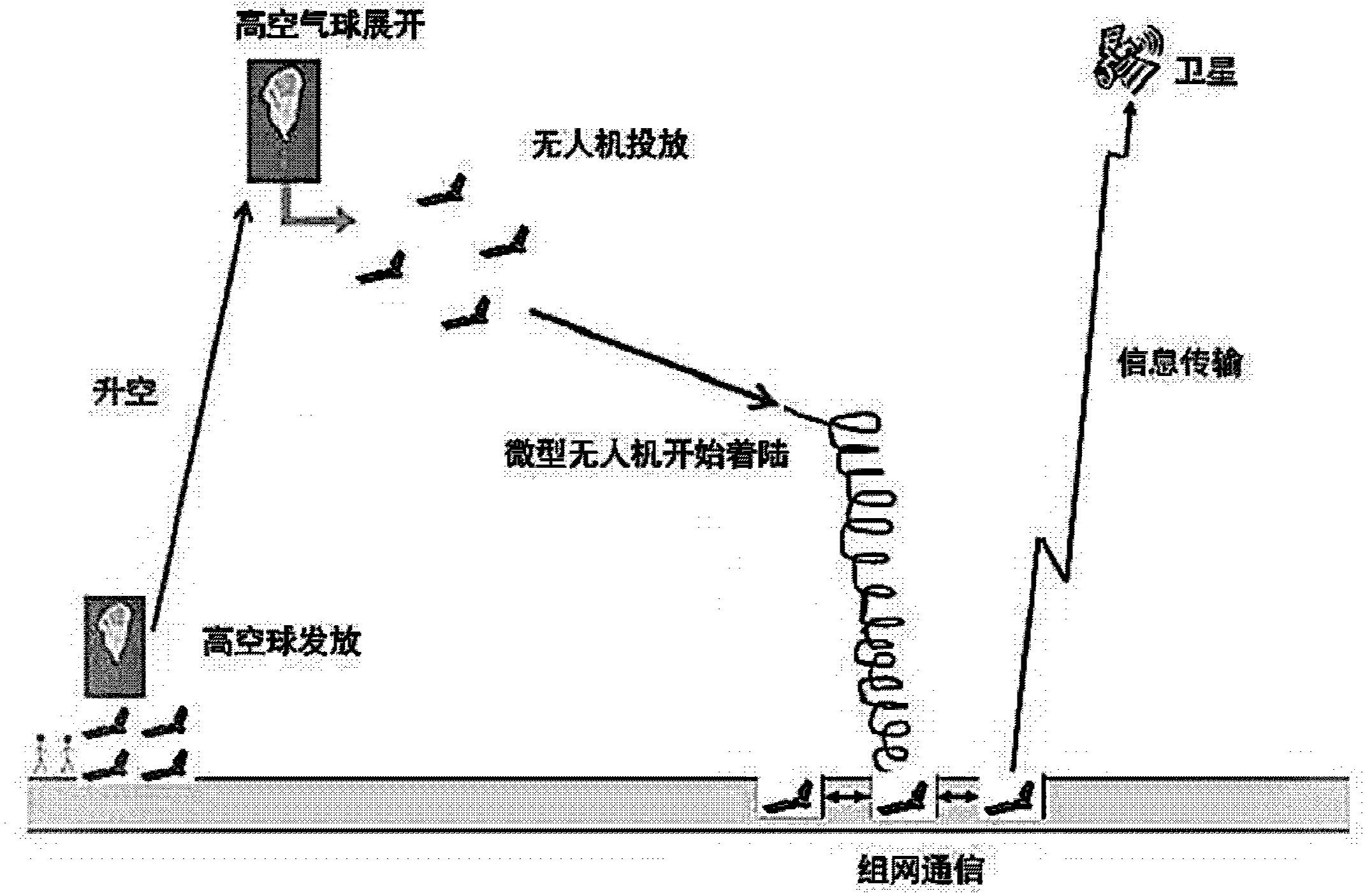
图4是本实用新型提供的信息获取系统的工作原理图。
具体实施方式
为使本实用新型的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本实用新型进一步详细说明。
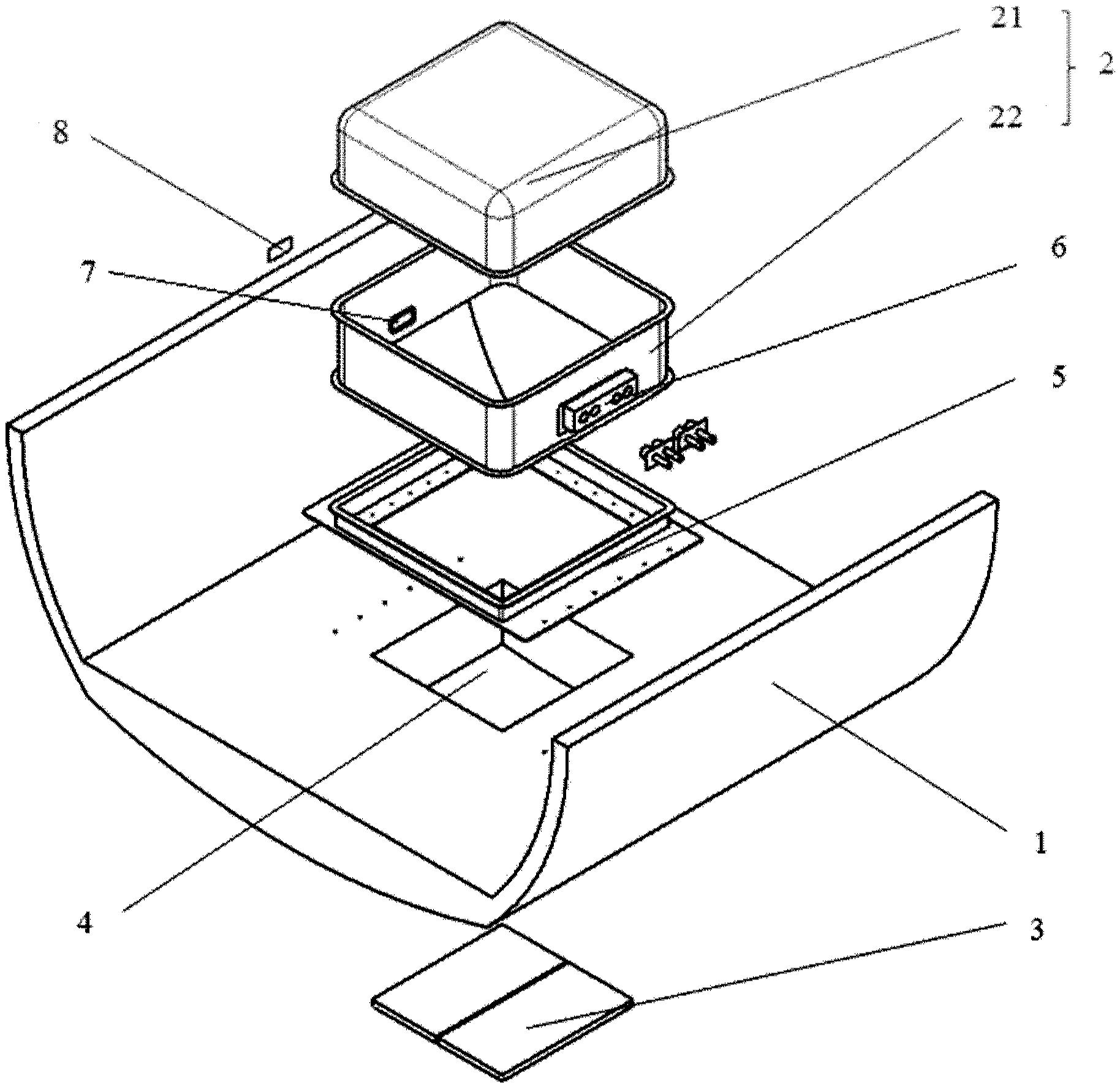
图2是本实用新型提供的信息获取系统的结构示意图,如图2所示,信息获取系统包括临近空间浮空平台1、高空播撒式投放装置2、柔性细缆3、多个微型无人机4及卫星(图未示),具体的,临近空间浮空平台1为临近空间高空气球,其通过柔性细缆3将高空播撒式投放装置2进行悬挂。临近空间高空气球工作时充入氦气,可将高空播撒式投放装置2升至20km以上临近空间区域,然后利用自然风将高空播撒式投放装置2安全送至高空投放位置,其中,多个微型无人机4置于高空播撒式投放装置2中,例如,可将100架微型无人机4放置于高空播撒式投放装置2中,以在指定位置进行投放。高空播撒式投放装置是微型无人机的搭载平台,当到达投放的指定位置时,底部舱门开启,可将多个微型无人机分批次播撒式投放。
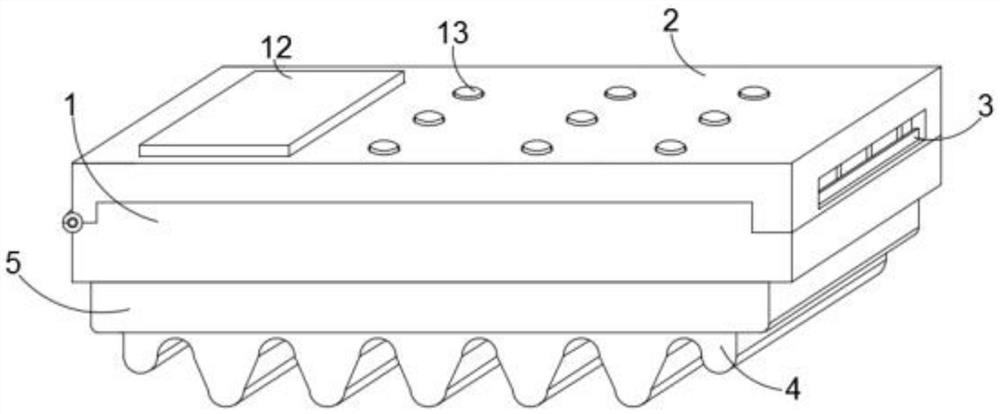
图3是本实用新型提供的微型无人机的结构示意图,如图3所示,微型无人机4的翼面形状为展弦比为1.2的反齐默曼(Inverse Zimmerman)平板翼型,机体41为厚度为1.5mm的印刷电路板(PCB)。微型无人机包括集成在印刷电路板41上的飞行控制系统42、传感器43及通信设备44。其中,印刷电路板上还设有能源电池,用于对印刷电路板进行供电,以使印刷电路板41上的飞行控制系统42、传感器43及通信设备44能正常工作,能源电池上粘贴有保温电阻片,使微型无人机4能够在高空低温环境下正常工作。另外,微型无人机4还包括一个自毁装置,用于在能源电池耗尽后,对印刷电路板41进行摧毁,避免技术泄露。
飞行控制系统42所采用的电子元器件直接焊接在PCB板之上,减轻了附加结构的重量。另外,由于微型无人机不携带动力源,在微型无人机4被投放后,飞行控制系统42控制微型无人机4襟副翼滑翔飞行。
传感器43是一类尺寸小、重量轻的信息采集工具,搭载在微型无人机上用来执行信息获取任务,传感器43种类较多,比如声音传感器、震动传感器、磁力传感器等等,本实用新型可根据不同任务选择不同的传感器进行安装。
通信设备44用于与卫星通信,以将传感器43采集到的信息发送至卫星,再由卫星转发至地面的接收中心进行信息分析等后续处理。
图4是本实用新型提供的信息获取系统的工作原理图,如图4所示,利用信息获取系统执行信息获取的具体步骤如下:
S1,根据任务目的选择相应类型的传感器43,并将其集成到微型无人机4上,调整微型无人机4重心位置,使其具有较高升阻比;
S2,在微型无人机4的印刷电路板41上的能源电池位置粘贴保温电阻片,使微型无人机4能够在高空低温环境下正常工作;
S3,将100架调整完毕的微型无人机4安装在高空播撒式投放装置2内部,通过柔性细缆3将高空播撒式投放装置2稳定悬挂在临近空间高空气球1下方;
S4,在临近空间高空气球1内部充入氦气,并通过地面基础设施进行释放,使临近空间高空气球1携带投放装置2升空;
S5,根据不同高度风向不同的原理,通过调节临近空间高空气球1上压舱物的重量,使临近空间高空气球1稳定在有利风向高度,水平飞向目标地点;
S6,在水平方向距离目标地点10公里位置,高空播撒式投放装置2底部舱门开启,将100架微型无人机4分批次播撒式投放;
S7,在微型无人机4上飞行控制系统42引导下,100架微型无人机以目标地点10公里为半径,分别以不同方向、不同着陆点潜入目标地点周围;
S8,微型无人机4着陆后,开启传感器43并执行信息获取任务;
S9,收集到有效信息后,通过微型无人机4上携带的通信设备44将信息发送给卫星,进而通过卫星将信息传递回至地面信息中心;
S10,在微型无人机4上电源耗尽后,启动自毁装置,对印刷电路板41进行摧毁,避免技术泄露。
综上所述,本实用新型提供的基于临近空间浮空平台的信息获取系统,由于采用临近空间浮空平台作为母平台,从而具有较好的载荷能力,同时,临近空间浮空平台具有自主控制能力,可以稳定在某一高度上,利用风的作用飞向目标点;采用高隐蔽性的浮空平台与微型无人机的组合提高了系统的隐蔽性及安全性;使用临近空间浮空平台成批次播撒式投放数量多、分布区域广的微型无人机,提高了任务的成功概率;微型无人机与卫星直接通信,简化了信息传输链路,提高了信息传输的安全性与可靠性。
以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
一种基于临近空间浮空平台的信息获取系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0