








专利摘要
本实用新型提出一种复合式万米级潜水器,属于海洋工程技术领域,其扩展性好,能够搭载多任务作业工具,并具有多种作业模式,只需一条作业母船、一套布放系统即可完成区域搜索、定点观测以及水下操控作业。该复合式万米级潜水器,包括水下自主潜水器、遥控单元和水下作业单元;遥控单元包括中继控制器和微细光纤,微细光纤的一端连接于中继控制器,微细光纤的另一端可拆卸连接于水下自主潜水器的顶部;水下作业单元包括可拆卸连接于水下自主潜水器底部的搭载架,搭载架搭载有水下作业工具和动力源,搭载架的中部填充有由多块浮力块构成的组合浮力块,组合浮力块提供的浮力与水下作业单元的整体重力相等。
权利要求
1.复合式万米级潜水器,其特征在于:包括水下自主潜水器、遥控单元和水下作业单元;
所述遥控单元包括中继控制器和微细光纤,所述微细光纤的一端连接于所述中继控制器,所述微细光纤的另一端可拆卸连接于所述水下自主潜水器的顶部;
所述水下作业单元包括可拆卸连接于所述水下自主潜水器底部的搭载架,所述搭载架搭载有水下作业工具和动力源,所述搭载架的中部填充有由多块浮力块构成的组合浮力块,所述组合浮力块提供的浮力与所述水下作业单元的整体重力相等。
2.根据权利要求1所述的复合式万米级潜水器,其特征在于:所述搭载架呈镂空的框架结构,所述组合浮力块安装于所述搭载架内。
3.根据权利要求1或2所述的复合式万米级潜水器,其特征在于:所述搭载架与水下自主潜水器的延伸方向相同,以所述搭载架靠近所述水下自主潜水器艏部的一端为前、靠近所述水下自主潜水器艉部的一端为后;所述搭载架搭载有两个第一辅助推进器和两个第二辅助推进器,两个所述第一辅助推进器对称设置于所述组合浮力块的前方和后方,两个所述第二辅助推进器对称设置于所述组合浮力块的左方和右方,所述第一辅助推进器的叶片在竖直面内旋转,所述第二辅助推进器的叶片在水平面内旋转。
4.根据权利要求3所述的复合式万米级潜水器,其特征在于:所述水下自主潜水器中间段框架的下部设有沿横向设置的扩展连接座,所述扩展连接座至少为两个,所述搭载架的顶部固定连接有固定连接座,每个所述扩展连接座可拆卸连接两个所述固定连接座,连接于同一所述扩展连接座的两个所述固定连接座对称设置于所述搭载架的左右两侧,所述扩展连接座和固定连接座通过连接板可拆卸铰接。
5.根据权利要求4所述的复合式万米级潜水器,其特征在于:至少一个所述扩展连接座位于所述水下自主潜水器中间段的前部,至少一个所述扩展连接座位于所述水下自主潜水器中间段的后部。
6.根据权利要求1所述的复合式万米级潜水器,其特征在于:所述水下作业工具包括机械手、采样器、切割机、剪钳、冲击扳手中的一种或多种。
7.根据权利要求1所述的复合式万米级潜水器,其特征在于:所述动力源包括电池组和液压动力源。
8.根据权利要求1所述的复合式万米级潜水器,其特征在于:所述水下自主潜水器的顶部设有光纤连接座,所述微细光纤可拆卸铰接于所述光纤连接座。
9.根据权利要求1所述的复合式万米级潜水器,其特征在于:所述水下自主潜水器底部靠近艏部处安装有高度计、全海深相机、万米照明灯、一级抛载装置和二级抛载装置,所述水下自主潜水器顶部靠近艏部处安装有信标机。
10.根据权利要求9所述的复合式万米级潜水器,其特征在于:所述水下自主潜水器的艏部安装有防撞罩。
说明书
技术领域
本实用新型属于海洋工程技术领域,尤其涉及一种复合式万米级潜水器。
背景技术
传统的潜水器分为两大类,一类是载人潜水器(HOV),另一类是水下无人潜水器(UUV);其中,水下无人潜水器(UUV)又细分为水下自主潜水器(AUV)和遥控无人潜水器(ROV)。然而,这些潜水器各自都有一定的局限性:HOV可搭载人员进行作业,但存在水下持续时间短、维护保障复杂的缺点;ROV受到脐带缆的影响,作业范围受到很大限制;AUV的作业范围较大,但无法实现精细定点作业、人工实时干预,且其扩展性受限,缺乏多任务载荷搭载功能。因而,海洋科考、搜救等往往是多种潜水器协同作业。
目前,AUV/ROV布放回收系统有较强的专业性,被广泛应用于海洋科考、搜救等任务中。然而,由于不同种类潜水器的接口往往不能兼容,目前还难以在一条母船上共用一套系统来布放回收两种潜水器,执行一次海洋科考或搜救任务,往往需要出动多艘母船,占用航道、费时费力,且营运及维护成本高。
实用新型内容
本实用新型针对上述现有潜水器在进行海洋科考、搜救等任务中存在的不足,提出一种复合式万米级潜水器,其扩展性好,能够搭载多任务作业工具,并具有多种作业模式,只需一条作业母船、一套布放系统即可完成区域搜索、定点观测以及水下操控作业。
为了达到上述目的,本实用新型采用的技术方案为:
复合式万米级潜水器,包括水下自主潜水器、遥控单元和水下作业单元;所述遥控单元包括中继控制器和微细光纤,所述微细光纤的一端连接于所述中继控制器,所述微细光纤的另一端可拆卸连接于所述水下自主潜水器的顶部;所述水下作业单元包括可拆卸连接于所述水下自主潜水器底部的搭载架,所述搭载架搭载有水下作业工具和动力源,所述搭载架的中部填充有由多块浮力块构成的组合浮力块,所述组合浮力块提供的浮力与所述水下作业单元的整体重力相等。
作为优选,所述搭载架呈镂空的框架结构,所述组合浮力块安装于所述搭载架内。
作为优选,所述搭载架与水下自主潜水器的延伸方向相同,以所述搭载架靠近所述水下自主潜水器艏部的一端为前、靠近所述水下自主潜水器艉部的一端为后;所述搭载架搭载有两个第一辅助推进器和两个第二辅助推进器,两个所述第一辅助推进器对称设置于所述组合浮力块的前方和后方,两个所述第二辅助推进器对称设置于所述组合浮力块的左方和右方,所述第一辅助推进器的叶片在竖直面内旋转,所述第二辅助推进器的叶片在水平面内旋转。
作为优选,所述水下自主潜水器中间段框架的下部设有沿横向设置的扩展连接座,所述扩展连接座至少为两个,所述搭载架的顶部固定连接有固定连接座,每个所述扩展连接座可拆卸连接两个所述固定连接座,连接于同一所述扩展连接座的两个所述固定连接座对称设置于所述搭载架的左右两侧,所述扩展连接座和固定连接座通过连接板可拆卸铰接。
作为优选,至少一个所述扩展连接座位于所述水下自主潜水器中间段的前部,至少一个所述扩展连接座位于所述水下自主潜水器中间段的后部。
作为优选,所述水下作业工具包括机械手、采样器、切割机、剪钳、冲击扳手中的一种或多种。
作为优选,所述动力源包括电池组和液压动力源。
作为优选,所述水下自主潜水器的顶部设有光纤连接座,所述微细光纤可拆卸铰接于所述光纤连接座。
作为优选,所述水下自主潜水器底部靠近艏部处安装有高度计、全海深相机、万米照明灯、一级抛载装置和二级抛载装置,所述水下自主潜水器顶部靠近艏部处安装有信标机。
作为优选,所述水下自主潜水器的艏部安装有防撞罩。
与现有技术相比,本实用新型的优点和有益效果在于:
1、本实用新型提供的复合式万米级潜水器,其为分体式结构,在水下自主潜水器的基础上可拆卸连接有遥控单元和水下作业单元,使其具有多种作业模式:当仅采用水下自主潜水器时,其为自主作业模式,可自主执行区域搜索和定点观测等任务,且此时水下自主潜水器无外部拓宽设备,外形流阻较小,可实现5节以上速度的高速巡航;当采用水下自主潜水器与遥控单元组合后,其为半自主作业模式,利用中继控制器和微细光纤实现水下自主潜水器与母船的通信,使潜水器具备实时、精细化观测功能,从而通过人工遥控避免近海面复杂海况对潜水器自主航行的干扰;当采用水下自主潜水器、遥控单元和水下作业单元组合后,其为操控作业模式,利用中继控制器和微细光纤实现水下自主潜水器与母船的通信,利用搭载架搭载水下作业工具,进而通过人工遥控实现水下操控作业;
2、本实用新型提供的复合式万米级潜水器,扩展性强,其通过作业模式的切换,可独立完成一次海洋科考或搜救任务,只需一条作业母船和一套布放系统,可有效降低布放回收风险,节省营运及维护成本,并易于拓展海洋科考功能;
3、本实用新型提供的复合式万米级潜水器,其水下作业单元中,通过增减组合浮力块中浮力块的数量,可实现水下作业单元的浮力调整,从而使搭载架可灵活搭载各种水下作业工具,实现多任务作业,而且,通过调节组合浮力块的浮力配置,可完成大质量的海底样品采集作业。
附图说明
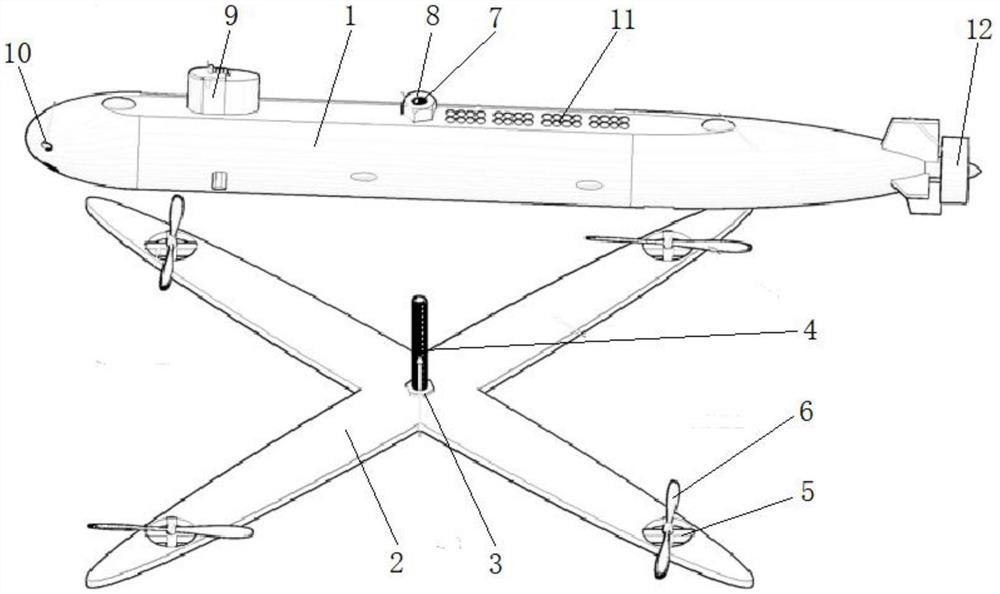
图1为本实用新型实施例提供的复合式万米级潜水器的结构示意图;
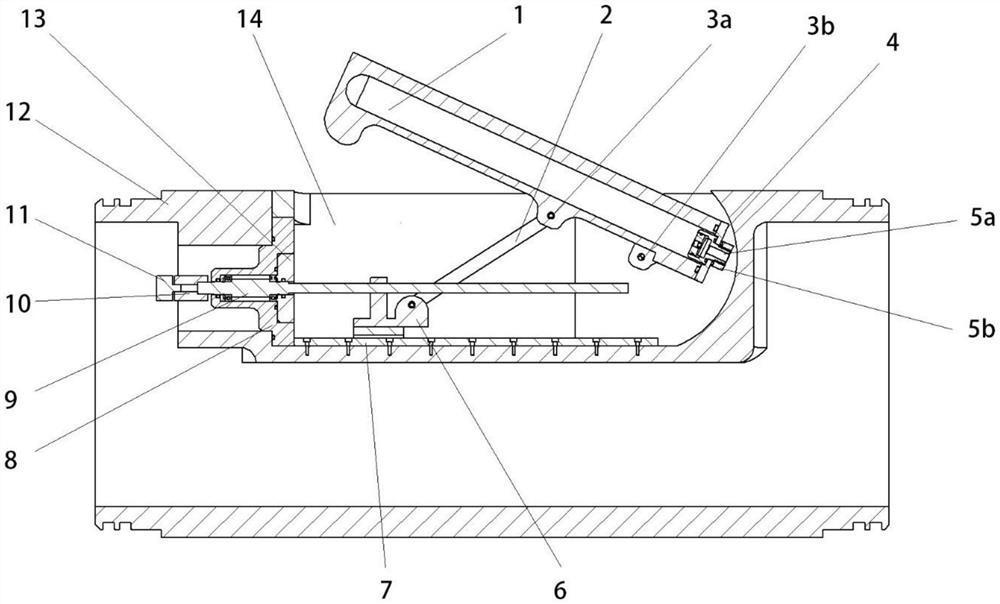
图2为沿图1中A-A线的剖视图;
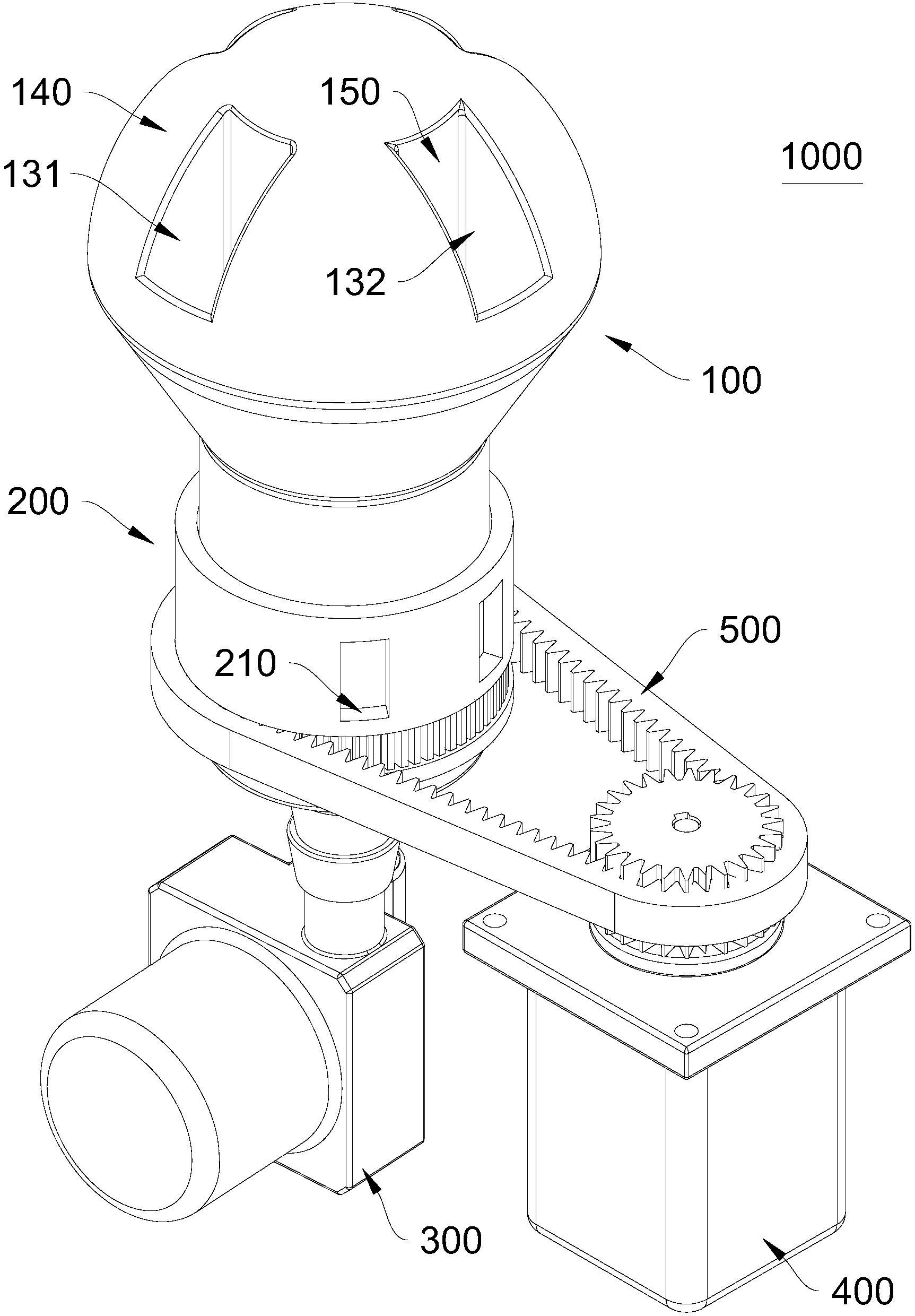
图3为本实用新型实施例提供的复合式万米级潜水器中水下自主潜水器与水下作业单元的连接示意图;
图4为图3中B处的局部放大图;
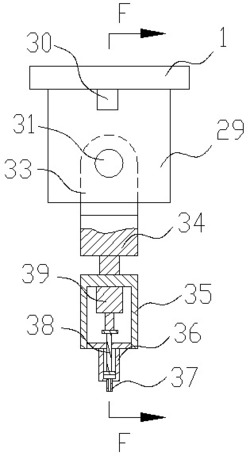
图5为本实用新型实施例提供的复合式万米级潜水器中水下作业单元的结构示意图;
图6为本实用新型实施例提供的复合式万米级潜水器中水下自主潜水器的结构示意图;
以上各图中:1、水下自主潜水器;11、光纤连接座;12、扩展连接座;13、高度计;14、全海深相机;15、万米照明灯;16、一级抛载装置;17、二级抛载装置;18、信标机;19、防撞罩;2、遥控单元;21、中继控制器;22、微细光纤;3、水下作业单元;31、固定连接座;32、搭载架;33、组合浮力块;34、第一辅助推进器;35、第二辅助推进器;36、机械手;37、采样器;38、液压动力源;39、电池组;4、连接板。
具体实施方式
下面,通过示例性的实施方式对本实用新型进行具体描述。然而应当理解,在没有进一步叙述的情况下,一个实施方式中的元件、结构和特征也可以有益地结合到其他实施方式中。
在本实用新型的描述中,需要说明的是,术语“内”、“外”、“上”、“下”、“前”、“后”等指示的方位或位置关系为基于附图2所示的位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
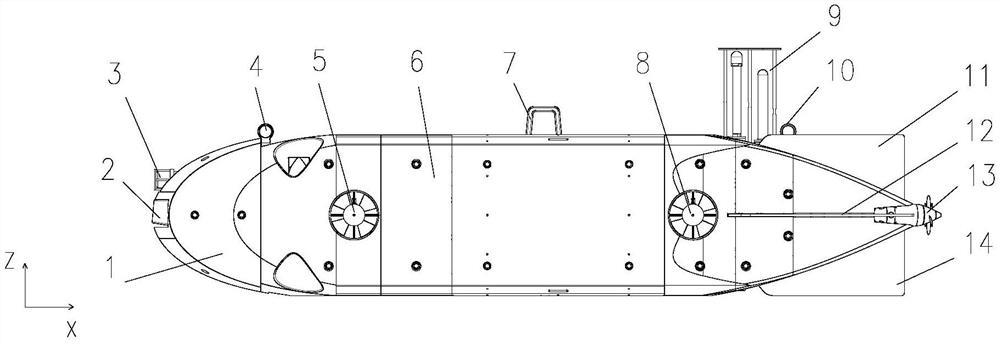
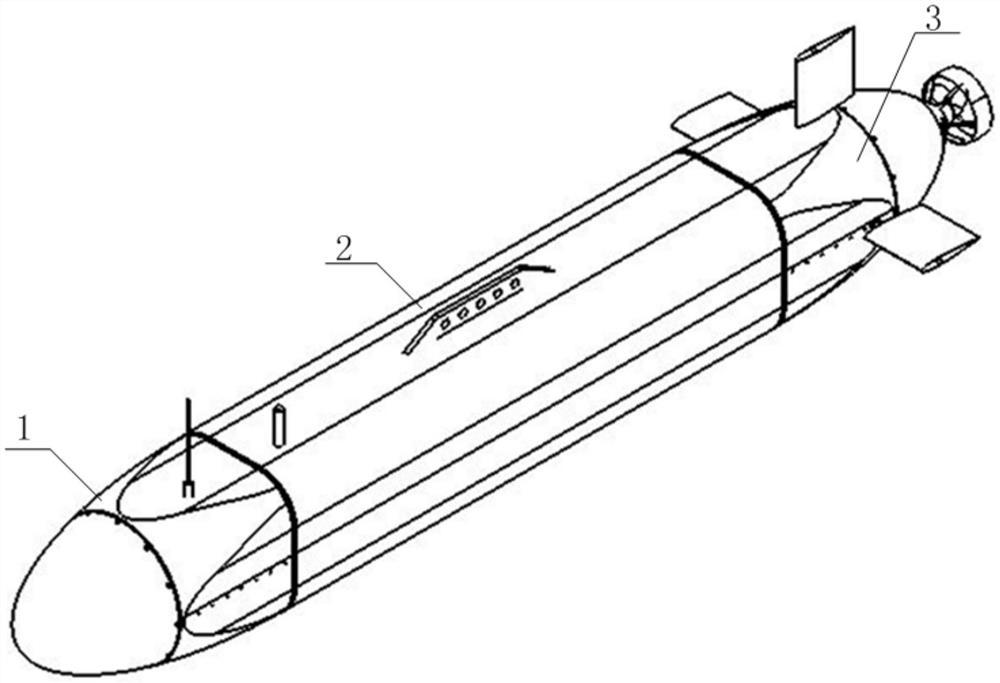
如图1-图6所示,本实用新型实施例涉及一种复合式万米级潜水器,包括水下自主潜水器1、遥控单元2和水下作业单元3;遥控单元2包括中继控制器21和微细光纤22,微细光纤22的一端连接于中继控制器21,微细光纤22的另一端可拆卸连接于水下自主潜水器1的顶部;水下作业单元3包括可拆卸连接于水下自主潜水器1底部的搭载架32,搭载架32搭载有水下作业工具和动力源,搭载架32的中部填充有由多块浮力块构成的组合浮力块33,组合浮力块33提供的浮力与水下作业单元3的整体重力相等。
上述复合式万米级潜水器,其为分体式结构,在水下自主潜水器1的基础上可拆卸连接有遥控单元2和水下作业单元3,使其具有多种作业模式:当仅采用水下自主潜水器1时,其为自主作业模式,可自主执行区域搜索和定点观测等任务,且此时水下自主潜水器1无外部拓宽设备,外形流阻较小,可实现5节以上速度的高速巡航;当采用水下自主潜水器1与遥控单元2组合后,其为半自主作业模式,利用中继控制器21和微细光纤22实现水下自主潜水器1与母船的通信,使潜水器具备实时、精细化观测功能,从而通过人工遥控避免近海面复杂海况对潜水器自主航行的干扰;当采用水下自主潜水器1、遥控单元2和水下作业单元3组合后,其为操控作业模式,利用中继控制器21和微细光纤22实现水下自主潜水器1与母船的通信,利用搭载架32搭载水下作业工具,进而通过人工遥控实现水下操控作业。而且,上述复合式万米级潜水器,扩展性强,其通过作业模式的切换,可独立完成一次海洋科考或搜救任务,只需一条作业母船和一套布放系统,可有效降低布放回收风险,节省营运及维护成本,并易于拓展海洋科考功能。此外,上述复合式万米级潜水器,其水下作业单元3中,通过增减组合浮力块33中浮力块的数量,可实现水下作业单元3的浮力调整,从而使搭载架32可灵活搭载各种水下作业工具,实现多任务作业,而且,通过调节组合浮力块33的浮力配置,可完成大质量的海底样品采集作业(可采集50kg以上海底样品)。
本实施例中,如图1所示,搭载架32与水下自主潜水器1的延伸方向相同,以便于水下自主潜水器1带动搭载架32及其搭载的水下作业工具航行。以下描述时,以搭载架32靠近水下自主潜水器1艏部的一端为前、靠近水下自主潜水器1艉部的一端为后。
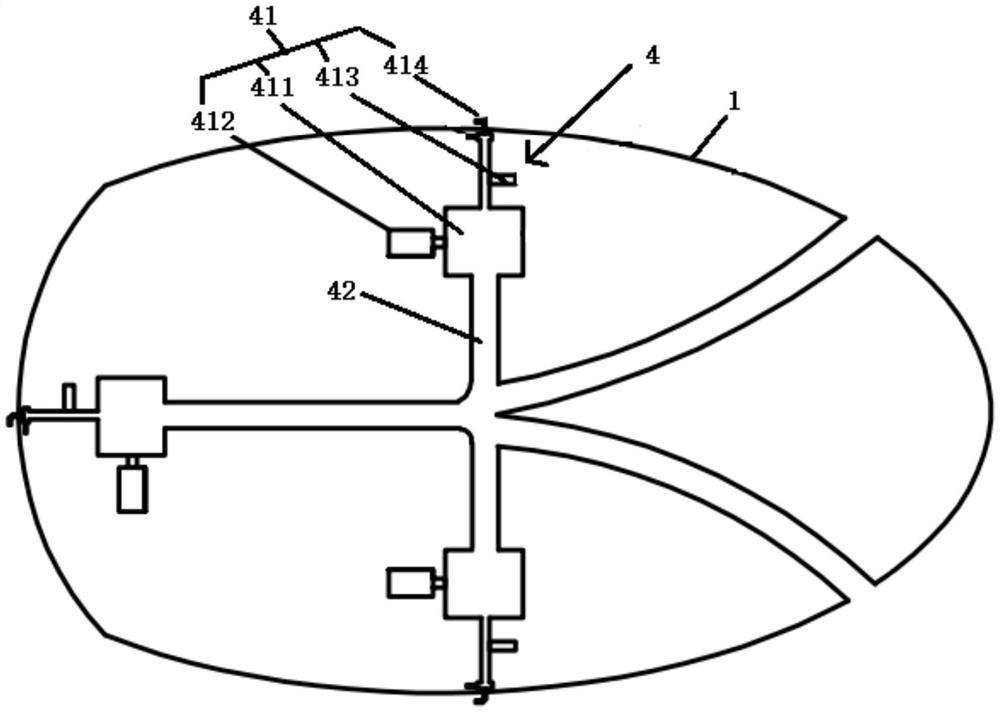
针对水下自主潜水器1和搭载架32的连接方式,如图2-图4所示,本实施中,水下自主潜水器1中间段框架的下部设有沿横向设置的扩展连接座12,扩展连接座12至少为两个,搭载架32的顶部固定连接有固定连接座31,每个扩展连接座12可拆卸连接两个固定连接座31,连接于同一扩展连接座12的两个固定连接座31对称设置于搭载架32的左右两侧,扩展连接座12和固定连接座31通过连接板4可拆卸铰接(本实施例中,具体为通过销轴连接扩展连接座12和连接板4、以及固定连接座31和连接板4)。为了保持水下自主潜水器1和搭载架32的平衡,本实施例中,至少一个扩展连接座12位于水下自主潜水器1中间段的前部,至少一个扩展连接座12位于水下自主潜水器1中间段的后部。
水下作业单元3的具体结构如图5所示,搭载架32呈镂空的框架结构,组合浮力块33安装于搭载架32内。本实施例中,将搭载架32设计为镂空的框架结构,有利于减少搭载架32自重,同时,组合浮力块33安装于搭载架32内部,便于调节组合浮力块33的位置,以使整个水下作业单元3的重心与浮心的连线与水下作业单元3的几何中垂线重合。需要说明的是,为了便于增减组合浮力块33中浮力块的数量,本实施例中,组合浮力块33中的各浮力块分别通过螺钉紧固于搭载架32。
为了便于进行精准的水下作业,如图5所示,搭载架32搭载有两个第一辅助推进器34和两个第二辅助推进器35,两个第一辅助推进器34对称设置于组合浮力块33的前方和后方,两个第二辅助推进器35对称设置于组合浮力块33的左方和右方;第一辅助推进器34的叶片在竖直面内旋转,用于保障水下作业单元3能够悬停在作业位置;第二辅助推进器35的叶片在水平面内旋转,用于控制水平方向的运动。
如图5所示,本实施例中,搭载架32搭载的水下作业工具包括机械手36和采样器37,均搭载在搭载架32的前端。可以理解的是,根据实际水下作业任务,搭载架32还可以搭载切割机、剪钳、冲击扳手等。
如图5所示,本实施例中,搭载架32搭载的动力源包括电池组39和液压动力源38。本实施例中,电池组39与第一辅助推进器34、第二辅助推进器35、采样器37等用电设备电连接以供电,液压动力源38与机械手36等需要液压控制的设备通过液压油管连接以提供液压动力。
针对水下自主潜水器1与微细光纤22的连接方式,如图1所示,水下自主潜水器1的顶部设有光纤连接座11,微细光纤22可拆卸铰接于光纤连接座11。可以理解的是,本领域技术人员也可以采用其他连接方式,将微细光纤22可拆卸连接于水下自主潜水器1。
如图6所示,本实施例中,水下自主潜水器1底部靠近艏部处安装有高度计13、全海深相机14、万米照明灯15、一级抛载装置16和二级抛载装置17,水下自主潜水器1顶部靠近艏部处安装有信标机18。其中,全海深相机14和万米照明灯15在执行水下观测任务时使用;高度计13用于监测距底高度,当距离低于预设距底高度时,一级抛载装置16和二级抛载装置17可迅速释放,实现防触底保护,正常工作时,一级抛载装置16在水下自主潜水器1下潜至预定深度后释放,以使水下自主潜水器1的自身浮力接近零浮力状态,而二级抛载装置17在任务完成后释放,以使水下自主潜水器1在正浮力作用下上浮出水;信标机18用于通信,以便于作业母船对水下自主潜水器1进行回收。需要说明的是,搭载架32位于一级抛载装置16和二级抛载装置17正下方的部分呈镂空设置,以避免妨碍一级抛载装置16和二级抛载装置17的释放。
为了防触底以保障高速巡航的安全性,如图6所示,水下自主潜水器1的艏部安装有防撞罩19,防撞罩19优选为ABS工程塑料。在高速巡航时,若高度计13未能及时读取距底信息、发生紧急碰撞时,防撞罩19起到缓冲作用,避免发生艏部蒙皮过大变形,影响一级抛载装置16和二级抛载装置17的释放。
上述复合式万米级潜水器的工作原理如下:
自主作业模式:在作业海区,通过作业母船的A型门吊布放水下自主潜水器1,水下自主潜水器1利用自身负浮力实现无动力方式下潜,到达预定深度后,水下自主潜水器1释放一级抛载装置16,使自身浮力接近零浮力状态,随后启动全海深相机14和万米照明灯15,执行区域搜索、观测任务,任务完成后,水下自主潜水器1释放二级抛载装置17,以使水下自主潜水器1在正浮力作用下上浮出水,作业母船通过信标机18准确定位水下自主潜水器1,进行回收;
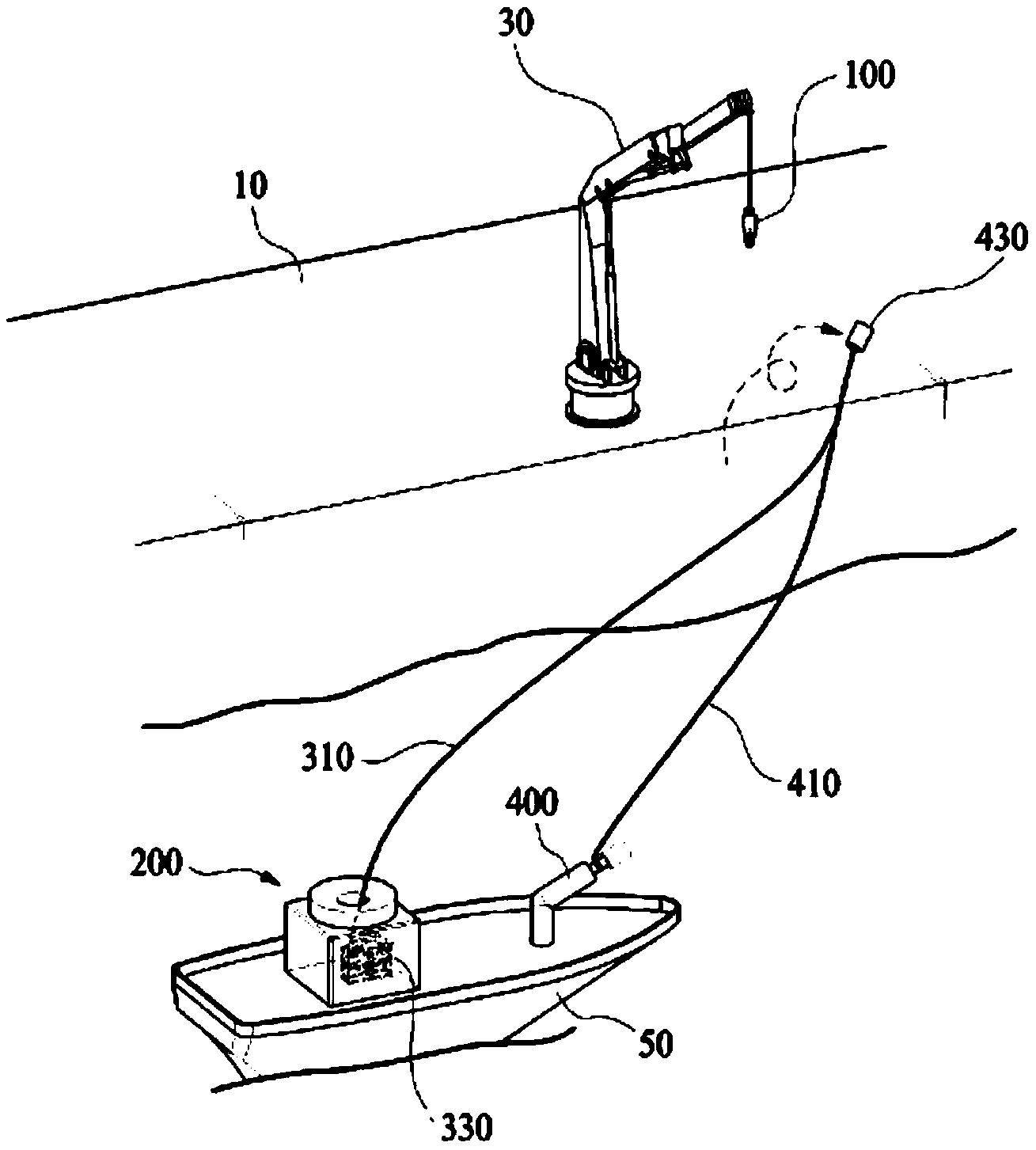
半自主作业模式:将遥控单元2中的微细光纤22连接于水下自主潜水器1,由作业母船通过复合铠装缆吊放中继控制器21和水下自主潜水器1至水中,水下自主潜水器1利用自身负浮力下潜至水下1000m深度,水下自主潜水器1释放一级抛载装置16,使自身浮力接近零浮力状态,中继控制器21与水下自主潜水器1之间通过微细光纤22进行通信传输,作业母船通过中继控制器21实现对水下自主潜水器1的遥控,利用全海深相机14和万米照明灯15可完成实时、精细化观测任务,并避免近海面复杂海况对水下自主潜水器1的航行干扰,任务完成后,水下自主潜水器1释放二级抛载装置17,以使水下自主潜水器1在正浮力作用下上浮出水,作业母船通过信标机18准确定位水下自主潜水器1,进行回收;
操控作业模式:根据水下作业需要,将水下作业工具搭载到搭载架32上,并调控组合浮力块33中浮力块的数量,使水下作业单元3在水下作业区域能够达到零浮力状态,然后将搭载架32连接于水下自主潜水器1,并将遥控单元2中的微细光纤22也连接于水下自主潜水器1,由作业母船通过复合铠装缆吊放中继控制器21和带有水下作业单元3的水下自主潜水器1至水中,水下自主潜水器1利用自身负浮力带着水下作业单元3一起下沉,到达作业区域后,水下自主潜水器1释放一级抛载装置16,使自身浮力接近零浮力状态,搭载架32搭载的第一辅助推进器34竖直工作,保障系统悬停,通过第二辅助推进器35控制水平方向的运动,纵向和航向由水下自主潜水器1的主推进机构及舵机控制,作业母船通过中继控制器21和微信光纤实现与水下自主潜水器1的通信以实现遥控,搭载架32搭载的水下作业工具在作业区域内作业,作业完成后,水下自主潜水器1释放二级抛载装置17,以使水下自主潜水器1在正浮力作用下带着水下作业单元3一起上浮出水,作业母船通过信标机18准确定位水下自主潜水器1,进行回收。
复合式万米级潜水器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0