

IPC分类号 : B63B35/00,B63B3/38,B63B3/28,H02J7/35,B63H5/07,G01N1/10,G01N1/14,B63B17/00,B63B11/00,B63B45/02,B63B45/08,G01S19/14


专利摘要
本实用新型公开了一种密闭船体空间远距离遥控海水采样的太阳能无人船,包括主船体、电力系统、推进系统、水质采样系统以及控制系统;主船体包括船壳板、船体骨架、平台甲板和圆弧顶结构;圆弧顶结构与船壳板以及船体骨架连接形成密闭船体空间;推进系统包括螺旋桨、高强度碳纤维圆管、连杆、推进电机和舵机;螺旋桨设置在无人船的尾端;高强度碳纤维圆管一端与推进电机的整流罩固定连接,另一端穿过设在船体上的推进器安装孔与连杆连接;连杆与舵机连接;螺旋桨还与推进电机连接;本实用新型具有续航力长、航海性能优异、绿色环保等优点,可全天候执行远距离遥控水质采样任务,同时具备一定的自主作业能力。
权利要求
1.一种密闭船体空间远距离遥控海水采样的太阳能无人船,其特征在于,包括主船体、电力系统、推进系统、水质采样系统以及控制系统;
所述主船体包括船壳板、船体骨架、平台甲板和圆弧顶结构;圆弧顶结构与船壳板以及船体骨架连接形成密闭船体空间;平台甲板与船壳板及船体骨架连接,水平设置在主船体密闭船体空间内;圆弧顶结构顶部设置有柔性太阳能薄膜电池组件、语音设备、灯光设备、摄像设备、告警设备、通讯导航设备以及避障设备;
所述电力系统包括柔性太阳能薄膜电池组件、接线盒、太阳能充电控制器、锂电池智能管理器和锂电池组;锂电池组由多个锂电池并联组成;每个柔性太阳能薄膜电池组件设有接线盒,多个柔性太阳能薄膜电池组件通过接线盒串联连接,并与太阳能充电控制器连接,锂电池智能管理器与太阳能充电控制器连接,锂电池组与锂电池智能管理器连接;
所述推进系统包括螺旋桨、高强度碳纤维圆管、连杆、推进电机和舵机;螺旋桨设置在无人船的尾端;高强度碳纤维圆管一端与推进电机连接,另一端穿过设在船体上的推进器安装孔与连杆连接;连杆与舵机连接;螺旋桨还与推进电机连接;
所述水质采样系统包括泵管、泵头、卷管器、蠕动泵、采样箱和废水排放管;泵头和蠕动泵以及蠕动泵和采样箱通过泵管连接,废水排放管将蠕动泵废水排放口与船体外部空间连接;卷管器、蠕动泵分别与控制系统控制器模块的卷管器控制器、蠕动泵控制器连接;
所述控制系统包括主控计算机、定位导航模块、通信模块、数据采集模块和控制器模块;定位导航模块、通信模块、数据采集模块和控制器模块分别与主控计算机连接。
2.根据权利要求1所述的密闭船体空间远距离遥控海水采样的太阳能无人船,其特征在于,所述主船体的下部为船壳板和船体骨架;船壳板由多块金属曲面板连续焊接而成,船壳板厚度为5mm;船壳板连续焊接覆盖在底部为V形、顶部为圆弧形的船体骨架上,形成V形船体剖面;圆弧顶结构连续焊接覆盖在船壳板与船体骨架上形成密闭船体空间;密闭船体空间内部左右舷设置一对直径为400mm、长度为2000mm的柱形水密浮力舱。
3.根据权利要求2所述的密闭船体空间远距离遥控海水采样的太阳能无人船,其特征在于,所述船体骨架为横骨架式,包括龙骨和肋板,船体中纵剖面船底处设置纵向连续的龙骨,龙骨厚度为5mm,龙骨下缘用连续焊方法焊接在船壳板上;船体骨架肋位间距为600mm,肋位处设置整体切割而成的厚度为5mm、底部为V形、顶部为圆弧形的肋板,中部三个肋板在距离平台甲板高度为337mm处设置直径为401mm的水密浮力舱安装孔,柱形水密浮力舱嵌入肋板的水密浮力舱安装孔内;各肋位上底部为V形、顶部为圆弧形的肋板与龙骨焊接形成底部为V形、顶部为圆弧形的船体骨架。
4.根据权利要求1所述的密闭船体空间远距离遥控海水采样的太阳能无人船,其特征在于,所述的圆弧顶结构在船首偏后处设置舱口及水密舱口盖,所述舱口沿船宽方向的最小宽度大于1740mm,沿船长方向的最小长度大于600m;水密舱口盖通过羊角螺丝紧密固定在圆弧顶结构上。
5.根据权利要求1所述的密闭船体空间远距离遥控海水采样的太阳能无人船,其特征在于,所述的平台甲板将船体内部空间一分为二,两部分船体空间包含三个设备舱室,三个设备舱室为电器设备舱、采样设备舱和锂电池舱;电器设备舱与采样设备舱之间以及采样设备舱与锂电池舱之间通过舱口或舱门相互连通;平台甲板距基线高度为500mm,平台甲板高于水线面,平台甲板外缘用连续焊方法焊接在船壳板及船体骨架上;平台甲板以上自船艉起依次设置电器设备舱和采样设备舱,电器设备舱与采样设备舱之间设置横舱壁及水密舱门,采样设备舱平台甲板以下船体空间为锂电池舱,平台甲板在船舯附近设置舱口及相应的水密舱口盖连接采样设备舱与锂电池舱;锂电池舱底部设置锂电池基座。
6.根据权利要求1所述的密闭船体空间远距离遥控海水采样的太阳能无人船,其特征在于,所述的主控计算机为基于PC104总线的PCM‐9375单板计算机;
所述定位导航模块包括GNSS天线、定位差分天线和GNSS信号接收机;其中,GNSS天线与GNSS信号接收机连接;GNSS信号接收机接入主控计算机的RS‐232串口;GNSS天线和定位差分天线设置在圆弧顶结构的后端,GNSS信号接收机设置在平台甲板后部的电器设备舱内;
所述通信模块包括数据传输天线、数据传输电台、视屏传输天线和视屏传输电台;数据传输天线与数据传输电台连接,数据传输电台接入主控计算机的RS‐232串口;视屏传输天线与视屏传输电台连接,视屏传输电台接入主控计算机的RS‐232串口;数据传输天线设置在圆弧顶结构的后端,数据传输电台设置在平台甲板后部的电器设备舱内;视屏传输天线设置在圆弧顶结构的后端,视屏传输电台设置在平台甲板后部的电器设备舱内;
所述数据采集模块包括摄像机、超声波传感器、三轴捷联磁阻式电子磁罗盘、智能陀螺仪、三轴加速度传感器和水深传感器;摄像机、超声波传感器、三轴捷联磁阻式电子磁罗盘、智能陀螺仪、三轴加速度传感器和水深传感器分别接入主控计算机的RS‐232串口;水深传感器安装在泵头上;
所述控制器模块包括推进器控制器、舵机控制器、卷管器控制器、蠕动泵控制器、摄像机控制器、灯光控制器和语音控制器;推进器控制器、舵机控制器、卷管器控制器、蠕动泵控制器、摄像机控制器、灯光控制器和语音控制器分接入主控计算机的RS‐232串口;所述推进器控制器还与推进电机连接,设置在平台甲板后部;舵机控制器还与舵机连接;卷管器控制器还与卷管器连接;蠕动泵控制器还与蠕动泵连接;摄像机控制器还与摄像机伺服电机连接。
7.根据权利要求1所述的密闭船体空间远距离遥控海水采样的太阳能无人船,其特征在于,所述的语音设备包括扬声器,扬声器与控制系统的语音控制器连接;灯光设备包括探照灯和红白绿三色航行灯,探照灯和红白绿三色航行灯分别与控制系统的灯光控制器连接;摄像设备包括摄像机,摄像机与主控计算机的RS‐232串口及摄像机控制器连接;告警设备包括警报器,警报器与控制系统的语音控制器连接;避障设备包括超声波传感器,超声波传感器与主控计算机的RS‐232串口连接;扬声器、探照灯和红白绿三色航行灯设置在圆弧顶结构前部;摄像机设置在圆弧顶结构前端;警报器设置在圆弧顶结构尾部;超声波传感器设置在圆弧顶结构前端。
8.根据权利要求1所述的密闭船体空间远距离遥控海水采样的太阳能无人船,其特征在于,所述的推进电机与控制系统的推进器控制器连接;舵机与控制系统的舵机控制器连接;推进电机额定功率为624W;所述的连杆主要由两根杆件和转向装置组成,两根杆件平行设置,两根杆件的两端分别与两个转向装置连接。
9.根据权利要求1所述的密闭船体空间远距离遥控海水采样的太阳能无人船,其特征在于,所述的锂电池智能管理器与推进系统的推进电机和舵机连接,与水质采样系统的卷管器、蠕动泵、采样箱连接,与扬声器、探照灯、红白绿三色航行灯、警报器连接;锂电池智能管理器还与控制系统主控计算机连接,与控制系统定位导航模块的GNSS信号接收机连接,与控制系统通信模块的数据传输天线、视屏传输电台连接,与控制系统数据采集模块的摄像机、超声波传感器、三轴捷联磁阻式电子磁罗盘、智能陀螺仪、三轴加速度传感器、水深传感器连接以及控制系统控制器模块的推进器控制器、舵机控制器、蠕动泵控制器、卷管器控制器、摄像机控制器、灯光控制器、语音控制器连接;
所述多个柔性太阳能薄膜电池组件横向粘贴在圆弧顶结构上表面,通过接线盒串联形成太阳能电池组;柔性太阳能薄膜电池组件选用CIGS薄膜电池;太阳能充电控制器设置在船体内部平台甲板上;锂电池智能管理器设置在船体内部平台甲板上电器设备舱内;锂电池设置在锂电池舱锂电池基座上,各锂电池间隔不小于25mm;锂电池的电池容量为100Ah,开路电压12V,锂电池为三元锂电池且内置保护板。
10.根据权利要求1所述的密闭船体空间远距离遥控海水采样的太阳能无人船,其特征在于,所述的船壳板及船体骨架、平台甲板和圆弧顶结构均由5086铝合金制成;所述高强度碳纤维圆管一端与推进电机连接是指高强度碳纤维圆管一端与推进电机的整流罩固定连接。
说明书
技术领域
本实用新型涉及一种无人船,特别是涉及一种密闭船体空间远距离遥控海水采样的太阳能无人船。
背景技术
无人船是一种在地面的基站或母船控制中心的远程监控下以自主或遥控方式航行于水面并完成特定任务的新型水面运动平台,是海洋环境监测、海洋水文数据观测、海洋灾害预警的重要手段之一。
对近海海域进行水质采样的传统手段主要是人工采集,人工采集需要采样人员先乘坐有人船舶到达采样地点,然后借助水质采样设备抽取水质样本,最后再乘坐有人船舶将水质样本带回岸上,其乘坐的有人船舶不得不增大排水量以保障人员安全,不可避免地增加了采样成本;对于一些寒冷、风浪较大或者污染物对人体有害等环境恶劣海域,采样人员进行现场采样十分辛苦而且十分危险,人身安全得不到保障,有时甚至无法到达采样区域;此外人工采集还具有采样周期较长,无法快速、准确反映水质污染情况的缺点,严重影响海洋污染防治工作的开展。
近年来,随着定位、通信、控制、人工智能等技术飞速发展,无人船(USV)、水下遥控机器人(ROV)、水下无人自主航行器无人(AUV)等无人移动监测平台已经逐渐应用到海洋水质检测领域。与在水下航行的ROV以及AUV相比,无人船在海洋表面运动,受到的外界约束少,具有较高的灵活性,应用范围十分广泛,且具有成本低廉、通讯可靠、定位方便、易于控制等优点,正逐步成为海洋探测领域的研究热点之一。
绿色化、智能化将成为船舶领域下一步发展的重点之一。具体来说,是通过突破船体线型设计技术、结构优化技术、减阻降耗技术、高效推进技术、清洁能源及可再生能源利用技术等,研制出节能环保型船舶;通过突破自动化技术等信息技术在船舶上的应用关键技术,实现航行自动化、机械自动化、装载自动化,并实现航线规划、船舶驾驶、航姿调整、设备监控等,提高船舶的智能化水平。
目前商业化水质采样无人船产品大多针对内河、湖泊、港口等小范围水域采样设计,船舶续航能力小(<70km),稳性、耐波性、快速性等航行性能较差,无法进行复杂的远距离海上采样作业,已经不能满足海洋环境监测部门对远离海岸的监测点动态检测的要求。因此,亟需一种续航力远、操纵方便、稳性及耐波性能优异的水质采样无人船。
在无人船船体平台方面,单体船作为技术最成熟的船型,在海洋科学研究无人船领域应用广泛。
实用新型内容
本实用新型主要是解决现有技术中所存在的技术问题,提供一种以可再生的太阳能为主要能源、续航力远、航行阻力小、耐波性能优异、操纵简便、具有抗倾覆能力的远距离遥控采样的太阳能单体无人船。
本实用新型目的通过如下技术方案实现:
一种密闭船体空间远距离遥控海水采样的太阳能无人船,包括主船体、电力系统、推进系统、水质采样系统以及控制系统;
所述主船体包括船壳板、船体骨架、平台甲板和圆弧顶结构;圆弧顶结构与船壳板以及船体骨架连接形成密闭船体空间;平台甲板与船壳板及船体骨架连接,水平设置在主船体密闭船体空间内;圆弧顶结构顶部设置有柔性太阳能薄膜电池组件、语音设备、灯光设备、摄像设备、告警设备、通讯导航设备以及避障设备;
所述电力系统包括柔性太阳能薄膜电池组件、接线盒、太阳能充电控制器、锂电池智能管理器和锂电池组;锂电池组由多个锂电池并联组成;每个柔性太阳能薄膜电池组件设有接线盒,多个柔性太阳能薄膜电池组件通过接线盒串联连接,并与太阳能充电控制器连接,锂电池智能管理器与太阳能充电控制器连接,锂电池组与锂电池智能管理器连接;
所述推进系统包括螺旋桨、高强度碳纤维圆管、连杆、推进电机和舵机;螺旋桨设置在无人船的尾端;高强度碳纤维圆管一端与推进电机连接,另一端穿过设在船体上的推进器安装孔与连杆连接;连杆与舵机连接;螺旋桨还与推进电机连接;
所述水质采样系统包括泵管、泵头、卷管器、蠕动泵、采样箱和废水排放管;泵头和蠕动泵以及蠕动泵和采样箱通过泵管连接,废水排放管将蠕动泵废水排放口与船体外部空间连接;卷管器、蠕动泵分别与控制系统控制器模块的卷管器控制器、蠕动泵控制器连接;
所述控制系统包括主控计算机、定位导航模块、通信模块、数据采集模块和控制器模块;定位导航模块、通信模块、数据采集模块和控制器模块分别与主控计算机连接。
为进一步实现本实用新型目的,优选地,所述主船体的下部为船壳板和船体骨架;船壳板由多块金属曲面板连续焊接而成,船壳板厚度为5mm;船壳板连续焊接覆盖在底部为V形、顶部为圆弧形的船体骨架上,形成V形船体剖面;圆弧顶结构连续焊接覆盖在船壳板与船体骨架上形成密闭船体空间;密闭船体空间内部左右舷设置一对直径为400mm、长度为2000mm的柱形水密浮力舱。
优选地,所述船体骨架为横骨架式,包括龙骨和肋板,船体中纵剖面船底处设置纵向连续的龙骨,龙骨厚度为5mm,龙骨下缘用连续焊方法焊接在船壳板上;船体骨架肋位间距为600mm,肋位处设置整体切割而成的厚度为5mm、底部为V形、顶部为圆弧形的肋板,中部三个肋板在距离平台甲板高度为337mm处设置直径为401mm的水密浮力舱安装孔,柱形水密浮力舱嵌入肋板的水密浮力舱安装孔内;各肋位上底部为V形、顶部为圆弧形的肋板与龙骨焊接形成底部为V形、顶部为圆弧形的船体骨架。
优选地,所述的圆弧顶结构在船首偏后处设置舱口及水密舱口盖,所述舱口沿船宽方向的最小宽度大于1740mm,沿船长方向的最小长度大于600m;水密舱口盖通过羊角螺丝紧密固定在圆弧顶结构上。
优选地,所述的平台甲板将船体内部空间一分为二,两部分船体空间包含三个设备舱室,三个设备舱室为电器设备舱、采样设备舱和锂电池舱;电器设备舱与采样设备舱之间以及采样设备舱与锂电池舱之间通过舱口或舱门相互连通;平台甲板距基线高度为500mm,平台甲板高于水线面,平台甲板外缘用连续焊方法焊接在船壳板及船体骨架上;平台甲板以上自船艉起依次设置电器设备舱和采样设备舱,电器设备舱与采样设备舱之间设置横舱壁及水密舱门,采样设备舱平台甲板以下船体空间为锂电池舱,平台甲板在船舯附近设置舱口及相应的水密舱口盖连接采样设备舱与锂电池舱;锂电池舱底部设置锂电池基座。
优选地,所述的主控计算机为基于PC104总线的PCM‐9375单板计算机;
所述定位导航模块包括GNSS天线、定位差分天线和GNSS信号接收机;其中,GNSS天线与GNSS信号接收机连接;GNSS信号接收机接入主控计算机的RS‐232串口;GNSS天线和定位差分天线设置在圆弧顶结构的后端,GNSS信号接收机设置在平台甲板后部的电器设备舱内;
所述通信模块包括数据传输天线、数据传输电台、视屏传输天线和视屏传输电台;数据传输天线与数据传输电台连接,数据传输电台接入主控计算机的RS‐232串口;视屏传输天线与视屏传输电台连接,视屏传输电台接入主控计算机的RS‐232串口;数据传输天线设置在圆弧顶结构的后端,数据传输电台设置在平台甲板后部的电器设备舱内;视屏传输天线设置在圆弧顶结构的后端,视屏传输电台设置在平台甲板后部的电器设备舱内;
所述数据采集模块包括摄像机、超声波传感器、三轴捷联磁阻式电子磁罗盘、智能陀螺仪、三轴加速度传感器和水深传感器;摄像机、超声波传感器、三轴捷联磁阻式电子磁罗盘、智能陀螺仪、三轴加速度传感器和水深传感器分别接入主控计算机的RS‐232串口;水深传感器安装在泵头上;
所述控制器模块包括推进器控制器、舵机控制器、卷管器控制器、蠕动泵控制器、摄像机控制器、灯光控制器和语音控制器;推进器控制器、舵机控制器、卷管器控制器、蠕动泵控制器、摄像机控制器、灯光控制器和语音控制器分接入主控计算机的RS‐232串口;所述推进器控制器还与推进电机连接,设置在平台甲板后部;舵机控制器还与舵机连接;卷管器控制器还与卷管器连接;蠕动泵控制器还与蠕动泵连接;摄像机控制器还与摄像机伺服电机连接。
优选地,所述的语音设备包括扬声器,扬声器与控制系统的语音控制器连接;灯光设备包括探照灯和红白绿三色航行灯,探照灯和红白绿三色航行灯分别与控制系统的灯光控制器连接;摄像设备包括摄像机,摄像机与主控计算机的RS‐232串口及摄像机控制器连接;告警设备包括警报器,警报器与控制系统的语音控制器连接;避障设备包括超声波传感器,超声波传感器与主控计算机的RS‐232串口连接;扬声器、探照灯和红白绿三色航行灯设置在圆弧顶结构前部;摄像机设置在圆弧顶结构前端;警报器设置在圆弧顶结构尾部;超声波传感器设置在圆弧顶结构前端。
优选地,所述的推进电机与控制系统的推进器控制器连接;舵机与控制系统的舵机控制器连接;推进电机额定功率为624W;所述的连杆主要由两根杆件和转向装置组成,两根杆件平行设置,两根杆件的两端分别与两个转向装置连接。
优选地,所述的锂电池智能管理器与推进系统的推进电机和舵机连接,与水质采样系统的卷管器、蠕动泵、采样箱连接,与扬声器、探照灯、红白绿三色航行灯、警报器连接;锂电池智能管理器还与控制系统主控计算机连接,与控制系统定位导航模块的GNSS信号接收机连接,与控制系统通信模块的数据传输天线、视屏传输电台连接,与控制系统数据采集模块的摄像机、超声波传感器、三轴捷联磁阻式电子磁罗盘、智能陀螺仪、三轴加速度传感器、水深传感器连接以及控制系统控制器模块的推进器控制器、舵机控制器、蠕动泵控制器、卷管器控制器、摄像机控制器、灯光控制器、语音控制器连接;
所述多个柔性太阳能薄膜电池组件横向粘贴在圆弧顶结构上表面,通过接线盒串联形成太阳能电池组;柔性太阳能薄膜电池组件选用CIGS薄膜电池;太阳能充电控制器设置在船体内部平台甲板上;锂电池智能管理器设置在船体内部平台甲板上电器设备舱内;锂电池设置在锂电池舱锂电池基座上,各锂电池间隔不小于25mm;锂电池的电池容量为100Ah,开路电压12V,锂电池为三元锂电池且内置保护板。
优选地,所述的船壳板及船体骨架、平台甲板和圆弧顶结构均由5086铝合金制成;所述高强度碳纤维圆管一端与推进电机连接是指高强度碳纤维圆管一端与推进电机的整流罩固定连接。
本实用新型通过在采样设备舱左右舷设置一对柱形水密浮力舱,提高了无人船在风浪中的自主稳定能力;本实用新型平台甲板设置在船体内部,用于布置各类设备;圆弧顶结构粘贴柔性太阳能薄膜电池,与船壳板及船体骨架一起形成密闭船体空间;本实用新型保证船体水密,维持船体结构强度,使无人船可以自主稳定地漂浮于海面;
本实用新型无人船采用单体船结构,工艺简单,船体结构自重轻,可装载载荷较大,船体结构整体性好,在大风浪中结构安全性较高。
与现有技术相比,本实用新型的有益效果是:
(1)圆弧顶设计。本实用新型用于远距离遥控采样的太阳能单体无人船采用圆弧顶设计,在不显著降低太阳能电池组转换效率的前提下增大了太阳能受光面积,提高了太阳能电池组的总功率,且圆弧顶对上浪及降雨天时快速排水、减少浪花及雨水对船体冲击较有利。
(2)抗沉与自主稳定设计。本实用新型的无人船在全密封的船体空间内部设置电器设备舱、锂电池舱等多个水密舱室,提高无人船在船体破损时的抗沉性;此外,与一般船舶重心在浮心之上,船体倾覆后稳性即丧失不同,本实用新型通过降低无人船重心高度再结合密闭船体空间、V形船体剖面实现重心偏低,浮心偏高,浮心在重心之上的“不倒翁”形态,使得无人船倾覆后可自主复位;同时,在采样设备舱设置独立的柱形水密浮力舱,可以保证在船体破损时无人船仍然保持有很大的浮力,使其依然具备足够的横稳心半径、足够大的横摇阻尼和摇荡回复力矩,从而提高了无人船安全性与在恶劣海况下的自主稳定能力。
(3)续航力远。本实用新型的无人船通过船体型线优化设计减小了航行阻力,同时,以取之不尽用之不竭的太阳能为主要能源,极大地提高了其续航力,同时整个无人船系统运行实现零排放零污染,节能环保。
(4)可全天候采样作业。本实用新型的无人船在以太阳能为主要能源的同时增设锂电池储能电池组存太阳能电池组储剩余电能,使其具备夜间以及阴雨天持续在相关海域开展水质采样工作的能力,从而使本实用新型的无人船具备全天候在相关海域持续动态采样的能力。
(5)操纵性好。本实用新型的无人船采用V形剖面使它很容易实现直线航行,即无人船拥有良好的航向稳定性;同时采用单推进器矢量推进方式,通过舵机控制水下推进器转动来获取不同方向的推力从而实现船体转向,无人船可实现原地转向,回转性能优良。因此,本实用新型的无人船拥有良好的操纵性。
(6)稳性和耐波性好,横摇幅值小。本实用新型采用V形剖面船体增大了船体横摇阻尼,外飘型船体增大了船体横摇时复原力臂,同时,采用柔性太阳能薄膜替代传统太阳能板、将锂电池组布置在船底以达到降低重心的目的,进一步提高了本实用新型的稳性和耐波性能、减小了横摇幅值,有效减轻了船体摇荡运动对水质采样工作的影响,提高了水质采样效率;经计算,本实用新型的无人船初稳性高GM不小于1.133m,在四级海况(特征风速20kn)下,迎浪航行垂荡运动响应不大于0.566m,迎浪航行纵摇运动响应不大于5.41°。
(7)采用模块化设计,设备布置灵活。船体内部空间充裕,可根据需要放置各式仪器设备,同时还可根据实际使用功能更换船体内部设备将本实用新型应用于港口监控、水文勘察、海事搜救等领域。
(8)分层采样。本实用新型的无人船通过控制泵管的收放,抽取不同水深的水质样本,并通过废水排放管将泵管内残留海水排出船体外,实现水质分层采样。
附图说明
图1是本实用新型的密闭船体空间远距离遥控海水采样的太阳能无人船的结构示意图;
图2是图1无人船的左示意图;
图3是图1无人船的俯视图;
图4是图1无人船的前视图;
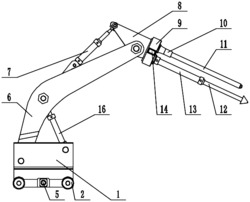
图5是图1无人船的推进系统的示意图;
图6是肋位肋板的结构示意图;
图7是图1无人船的控制系统示意图;
图中:1为主船体;1‐1为船壳板,1‐1‐1为推进器安装孔,1‐1‐2为泵管通过孔、1‐2为船体骨架,1‐2‐1为龙骨,1‐2‐2为肋板,1‐2‐3为水密浮力舱安装孔、1‐3为平台甲板,1‐3‐1为电器设备舱,1‐3‐2为采样设备舱,1‐3‐3为锂电池舱,1‐3‐4为横舱壁,1‐3‐5为水密舱门,1‐3‐6为柱形水密浮力舱,1‐3‐7为舱口,1‐3‐8为水密舱口盖,1‐3‐9为锂电池基座、1‐4为圆弧顶结构,1‐4‐1为扬声器,1‐4‐2为探照灯,1‐4‐3为红白绿三色航行灯,1‐4‐4为警报器,1‐4‐5为舱口,1‐4‐6为水密舱口盖,1‐4‐7为羊角螺丝;2为电力系统,2‐1为柔性太阳能薄膜电池组件,2‐2为接线盒,2‐3为太阳能充电控制器,2‐4为锂电池智能管理器,2‐5为锂电池;3为推进系统,3‐1为螺旋桨,3‐2为高强度碳纤维圆管,3‐3为连杆,3‐4为推进电机,3‐5为舵机;4为水质采样系统,4‐1为泵管,4‐2为泵头,4‐3为卷管器,4‐4为蠕动泵,4‐5为采样箱,4‐6为废水排放管;5为控制系统,5‐1为主控计算机;5‐2为定位导航模块,5‐2‐1为GNSS天线,5‐2‐2为定位差分天线,5‐2‐3为GNSS信号接收机;5‐3为通信模块,5‐3‐1为数据传输天线,5‐3‐2为数据传输电台,5‐3‐3为视屏传输天线,5‐3‐4为视屏传输电台;5‐4为数据采集模块,5‐4‐1为摄像机,5‐4‐2为超声波传感器,5‐4‐3为三轴捷联磁阻式电子磁罗盘,5‐4‐4为智能陀螺仪,5‐4‐5为三轴加速度传感器,5‐4‐6为水深传感器;5‐5为控制器模块,5‐5‐1为推进器控制器,5‐5‐2为舵机控制器,5‐5‐3为卷管器控制器,5‐5‐4为蠕动泵控制器,5‐5‐5为摄像机控制器,5‐5‐6为灯光控制器,5‐5‐7为语音控制器。
具体实施方式
为更好地支持本实用新型,下面结合附图对本实用新型作进一步的阐述,但本实用新型的实施方式不限如此。
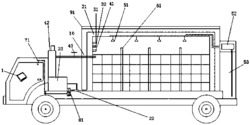
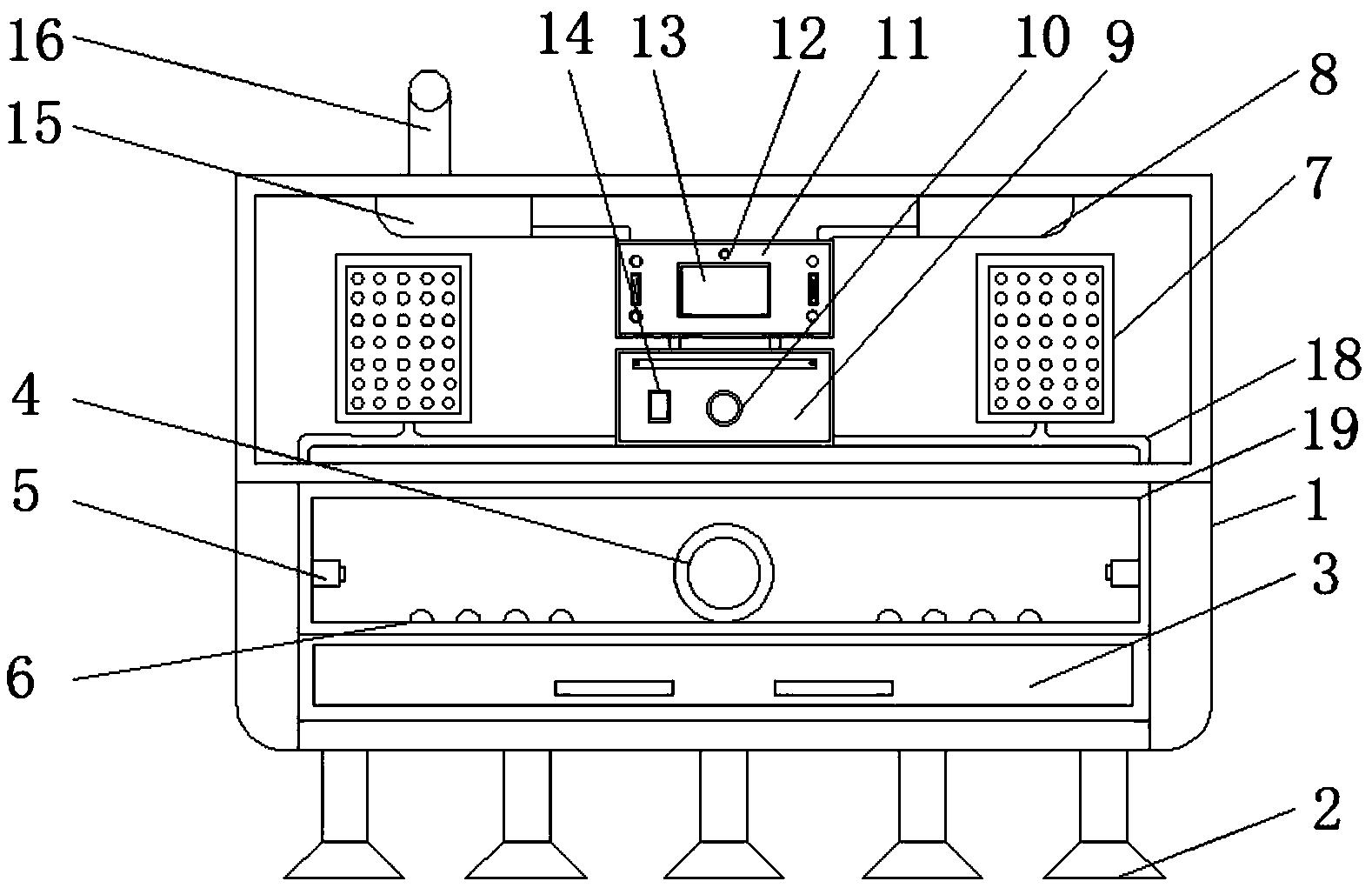
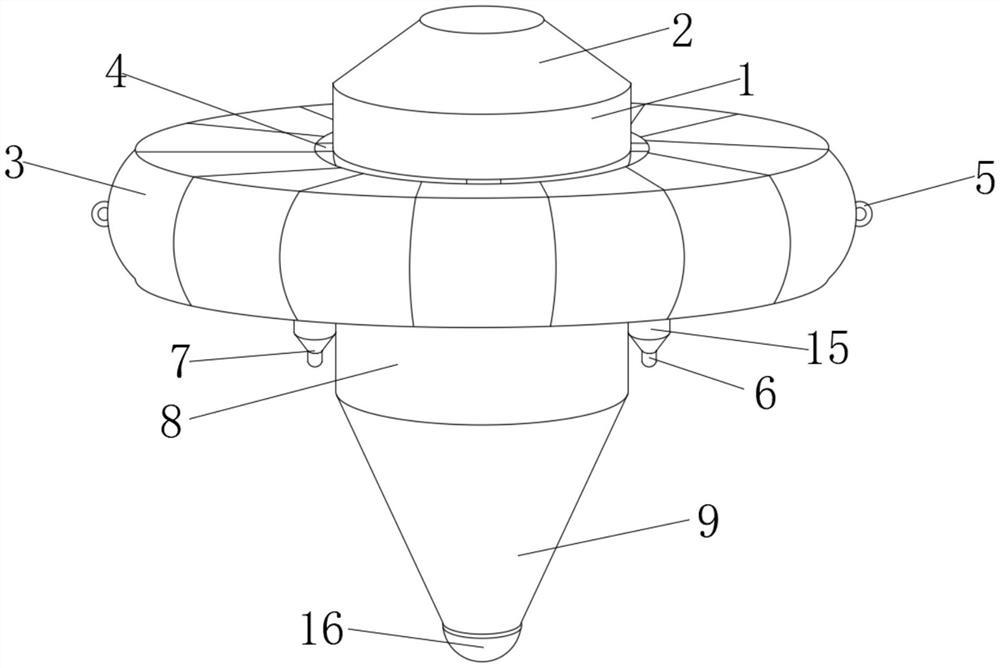
如图1‐7所示,一种密闭船体空间远距离遥控海水采样的太阳能无人船,包括主船体1、电力系统2、推进系统3、水质采样系统4以及控制系统5;其中,主船体1包括船壳板1‐1、船体骨架1‐2、平台甲板1‐3和圆弧顶结构1‐4;圆弧顶结构1‐4与船壳板1‐1以及船体骨架1‐2连接形成密闭船体空间;平台甲板1‐3与船壳板1‐1和船体骨架1‐2连接,水平设置在主船体1密闭船体空间内;控制系统5包括主控计算机5‐1、定位导航模块5‐2、通信模块5‐3、数据采集模块5‐4和控制器模块5‐5。
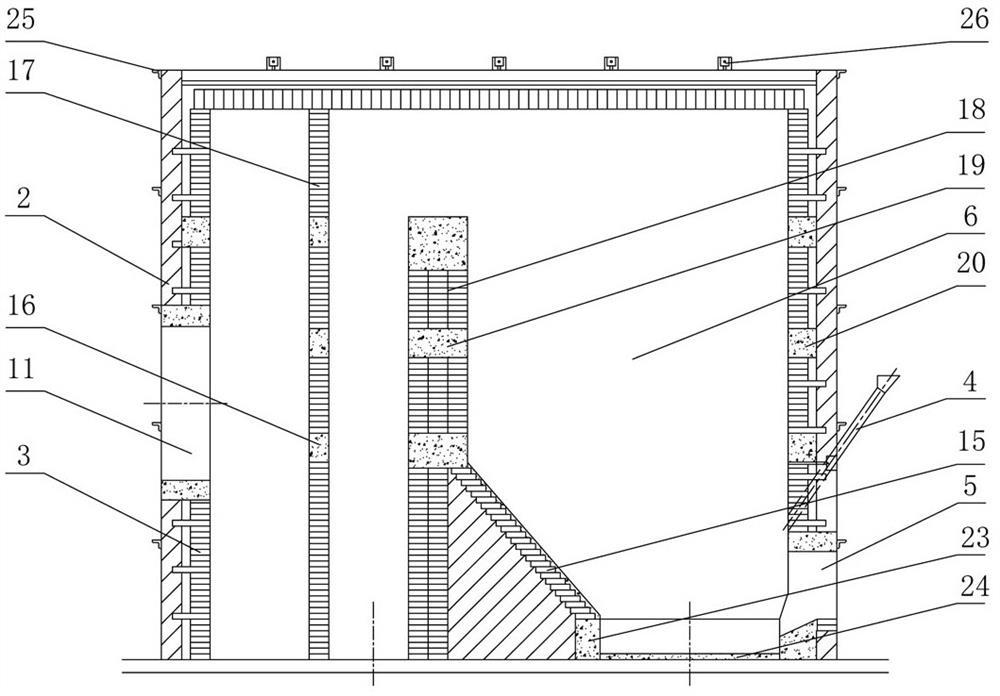
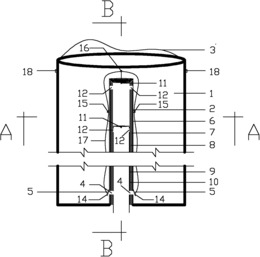
主船体1下部由船壳板1‐1和船体骨架1‐2组成;船体骨架1‐2包括龙骨1‐2‐1、肋板1‐2‐2,所述船体骨架1‐2优选为横骨架式;船体中纵剖面船底处设置纵向连续的龙骨1‐2‐1,其厚度优选为5mm,其下缘用连续焊方法焊接在船壳板1‐1上;船体骨架1‐2肋位间距优选为600mm,所述肋位处设置整体切割而成的厚度优选为5mm、底部为V形、顶部为圆弧形的肋板1‐2‐2,中部三个肋板1‐2‐2在距离平台甲板1‐3高度优选为337mm处设置直径优选为401mm的水密浮力舱安装孔1‐2‐3;各肋位上底部为V形、顶部为圆弧形的肋板1‐2‐2与龙骨1‐2‐1焊接形成底部为V形、顶部为圆弧形的船体骨架1‐2;船壳板1‐1艉部设置推进器安装孔1‐1‐1,艏部设置泵管通过孔1‐1‐2。船壳板1‐1由多块金属曲面板连续焊接而成,保证船体水密,使无人船漂浮于海面;优选的,所述船壳板1‐1厚度优选为5mm。船壳板1‐1连续焊接覆盖在底部为V形、顶部为圆弧形的船体骨架1‐2上形成V形船体剖面,圆弧顶结构1‐4连续焊接覆盖在船壳板1‐1与船体骨架1‐2上形成密闭船体空间。与通常的圆舭型船相比,V型船体横向投影面积较大,它很容易实现直线航行,即无人船拥有良好的航向稳定性,此外,横向投影面积较大增大了船体横摇阻尼,外飘型船体增大了船体横摇时复原力臂,使稳性得到增强。
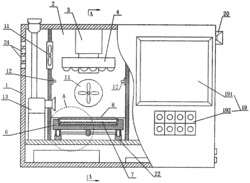
平台甲板1‐3将船体内部空间一分为二,两部分船体空间包含三个设备舱室,包括电器设备舱1‐3‐1、采样设备舱1‐3‐2和锂电池舱1‐3‐3;电器设备舱1‐3‐1与采样设备舱1‐3‐2之间以及采样设备舱1‐3‐2与锂电池舱1‐3‐3之间通过舱口或舱门相互连通;所述平台甲板1‐3距基线高度优选为500mm,略高于水线面,其外缘用连续焊方法焊接在船壳板1‐1和船体骨架1‐2上,平台甲板1‐3将作为承受波浪力的主要纵向构件;平台甲板1‐3以上自船艉起依次设置电器设备舱1‐3‐1和采样设备舱1‐3‐2,电器设备舱1‐3‐1与采样设备舱1‐3‐2之间设置横舱壁1‐3‐4及水密舱门1‐3‐5,采样设备舱1‐3‐2左右舷设置一对直径优选为400mm、长度优选为2000mm的柱形水密浮力舱1‐3‐6,柱形水密浮力舱1‐3‐6嵌入肋板1‐2‐2的水密浮力舱安装孔1‐2‐3内,柱形水密浮力舱1‐3‐6的舱壁与船壳板1‐1、船体骨架1‐2和平台甲板1‐3等相互独立,即上述船壳板1‐1、船体骨架1‐2、平台甲板1‐3等的破损不改变柱形水密浮力舱1‐3‐6结构完整性,柱形水密浮力舱1‐3‐6将在其周围船体破损进水时产生阻止船体下沉的浮力,确保船体保持在漂浮状态以减小财产损失;平台甲板1‐3以下船体空间为锂电池舱1‐3‐3,平台甲板1‐3在船舯附近设置舱口1‐3‐7及相应的水密舱口盖1‐3‐8连接采样设备舱1‐3‐2与锂电池舱1‐3‐3;锂电池舱1‐3‐3底部设置锂电池基座1‐3‐9以限制锂电池2‐5与船体之间的相对运动。锂电池舱1‐3‐3布置在水线以下较低位置,其内布置重量较大的锂电池组,从而极大地降低无人船重心高度。密闭船体空间、V形船体剖面以及极低的重心共同实现了无人船的自主稳定性。
圆弧顶结构1‐4顶部设置有柔性太阳能薄膜电池组件2‐1、语音设备、灯光设备、摄像设备、告警设备、通讯导航设备以及避障设备。具体地:语音设备包括扬声器1‐4‐1,与控制系统5的语音控制器5‐5‐7连接;灯光设备包括探照灯1‐4‐2和红白绿三色航行灯1‐4‐3,分别与控制系统5的灯光控制器5‐5‐6连接;摄像设备包括摄像机5‐4‐1,与主控计算机5‐1的RS‐232串口及摄像机控制器5‐5‐5连接;告警设备包括警报器1‐4‐4,与控制系统5的语音控制器5‐5‐7连接;通讯导航设备包括GNSS天线5‐2‐1、定位差分天线5‐2‐2、数据传输天线5‐3‐1、视屏传输天线5‐3‐3,GNSS天线5‐2‐1、定位差分天线5‐2‐2与GNSS电台连接,数据传输天线5‐3‐1、视屏传输天线5‐3‐3分别与数据传输天台5‐3‐2和视屏传输电台5‐3‐4连接;避障设备包括超声波传感器5‐4‐2,与主控计算机5‐1的RS‐232串口连接;扬声器1‐4‐1及红白绿三色航行灯1‐4‐3设置在圆弧顶结构1‐4前部,用于岸基控制人员向周围船舶发出语音信号;探照灯1‐4‐2和红白绿三色航行灯1‐4‐3设置在圆弧顶结构1‐4前部,前者用于夜间航行照明,后者用于向周围船舶发出灯光信号,所述红白绿三色航行灯1‐4‐3从船舶的正前方到左舷正横后22.5
圆弧顶结构1‐4在船首偏后处设置舱口1‐4‐5及水密舱口盖1‐4‐6,所述舱口1‐4‐5沿船宽方向的最小宽度大于1740mm,沿船长方向的最小长度大于600m,可通过性良好,人员可通过舱口1‐4‐5进入船体内部进行设备检修;水密舱口盖1‐4‐6通过7组羊角螺丝1‐4‐7紧密固定在上述圆弧顶结构1‐4上,可将雨水及海水等与船体内部空间有效隔绝,提高无人船恶劣海况下的生存能力。
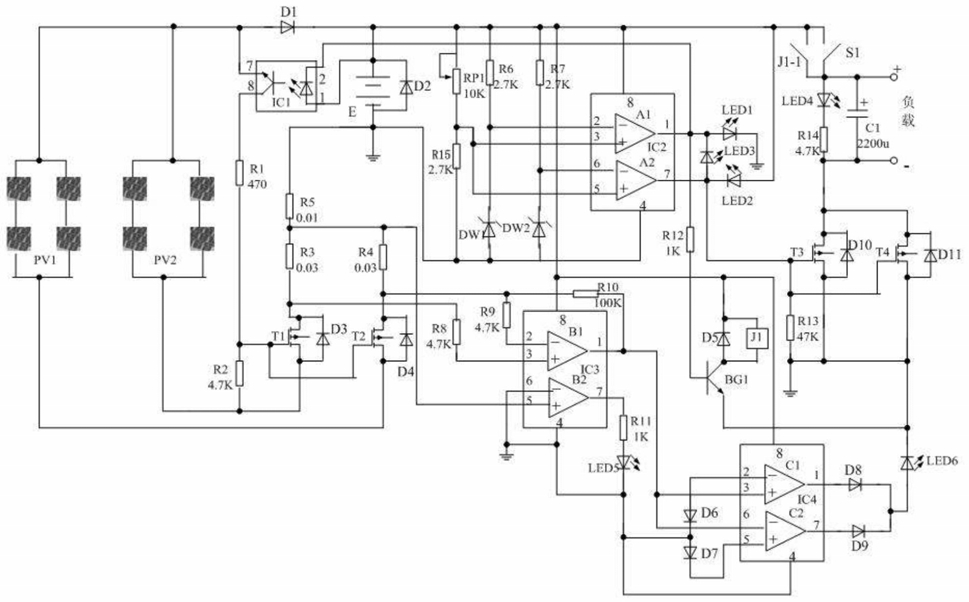
电力系统2包括:柔性太阳能薄膜电池组件2‐1、接线盒2‐2、太阳能充电控制器2‐3、锂电池智能管理器2‐4和锂电池组;锂电池组由多个锂电池2‐5并联组成;每个柔性太阳能薄膜电池组件2‐1设有接线盒2‐2,多个柔性太阳能薄膜电池组件2‐1通过接线盒2‐2串联连接,并与太阳能充电控制器2‐3连接,锂电池智能管理器2‐4与太阳能充电控制器2‐3连接,锂电池组与锂电池智能管理器2‐4连接;锂电池智能管理器2‐4与推进系统3的推进电机3‐4和舵机3‐5连接,与水质采样系统4的卷管器4‐3、蠕动泵4‐4、采样箱4‐5连接,与扬声器1‐4‐1、探照灯1‐4‐2、红白绿三色航行灯1‐4‐3、警报器1‐4‐4连接输出电能;锂电池智能管理器2‐4还与控制系统5主控计算机5‐1连接,与控制系统5定位导航模块5‐2的GNSS信号接收机5‐2‐3连接,与控制系统5通信模块5‐3的数据传输天台5‐3‐2、视屏传输电台5‐3‐4连接,与控制系统5数据采集模块5‐4的摄像机5‐4‐1、超声波传感器5‐4‐2、三轴捷联磁阻式电子磁罗盘5‐4‐3、智能陀螺仪5‐4‐4、三轴加速度传感器5‐4‐5、水深传感器5‐4‐6连接以及控制系统5控制器模块5‐5的推进器控制器5‐5‐1、舵机控制器5‐5‐2、蠕动泵控制器5‐5‐4、卷管器控制器5‐5‐4、摄像机控制器5‐5‐5、灯光控制器5‐5‐6、语音控制器5‐5‐7连接输出电能;多个柔性太阳能薄膜电池组件2‐1横向粘贴在圆弧顶结构1‐4上表面,通过接线盒2‐2串联形成太阳能电池组;优选的,柔性太阳能薄膜电池组件2‐1选用CIGS(铜铟镓硒)薄膜电池,型号为MiaSole FLEX‐02W(汉能),具有质量轻,转换效率高等有点;太阳能充电控制器2‐3设置在船体内部平台甲板1‐3上,优选的,太阳能充电控制器2‐3为MPPT太阳能充电控制器,其输出电压可调且具有较高的转换效率,在阴雨天等光线不足的天气中依然可以保持较高的转换效率;锂电池智能管理器2‐4用于对锂电池2‐5充电过程进行管理,其设置在船体内部平台甲板1‐3上电器设备舱1‐3‐1内;锂电池2‐5设置在锂电池舱1‐3‐3锂电池基座1‐3‐9上,优选的,各锂电池2‐5间隔不小于25mm,以利于电池散热;优选的,锂电池2‐5的电池容量为100Ah,开路电压12V,锂电池2‐5为三元锂电池且内置保护板,具有输出电压稳定、可靠性高、使用寿命长等优点。
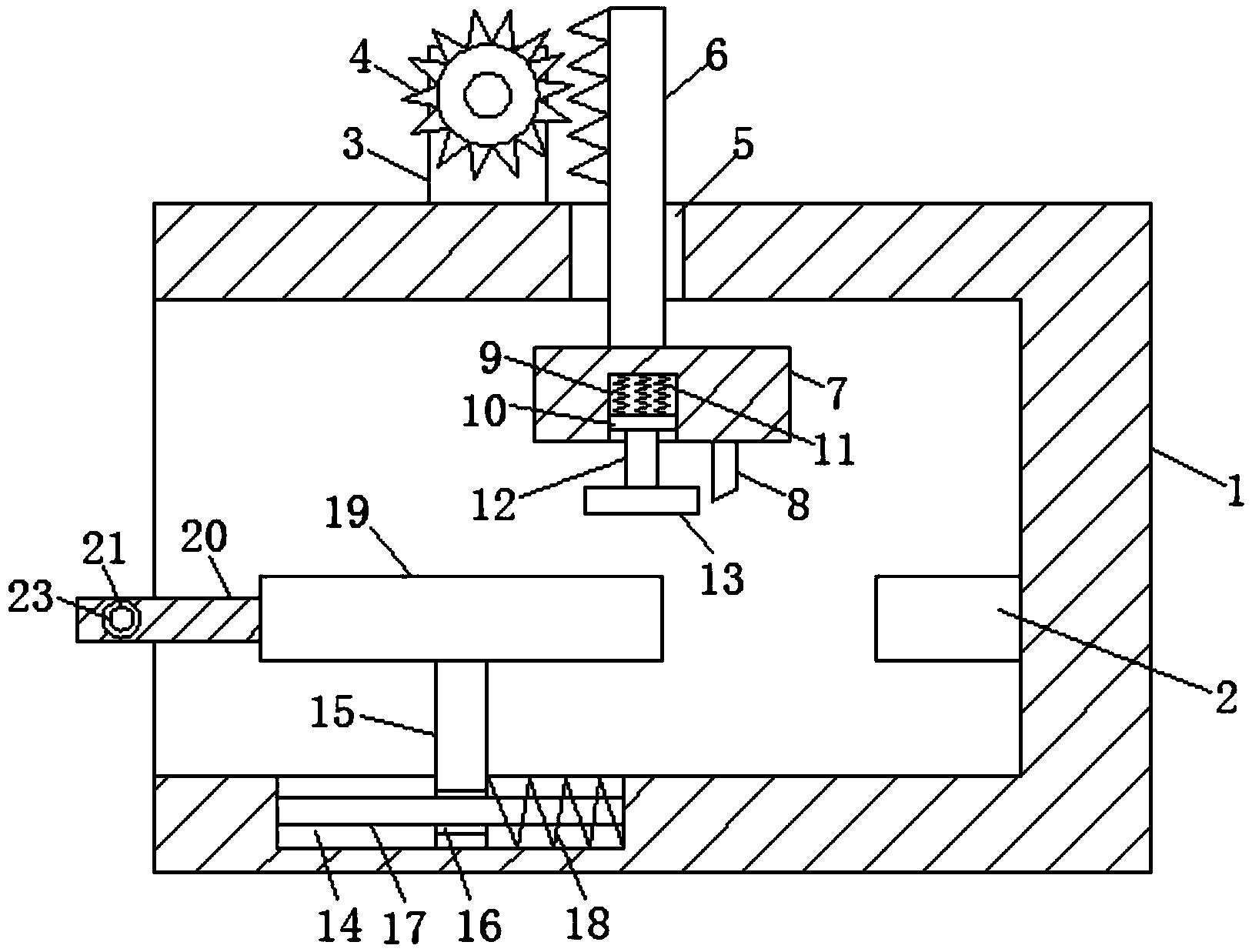
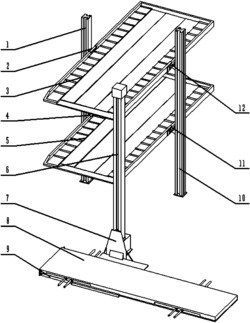
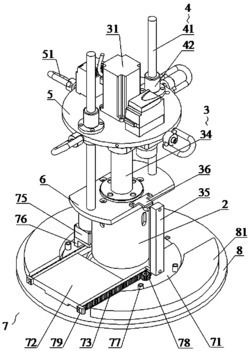
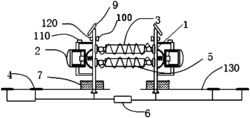
如图5所示,推进系统3包括:螺旋桨3‐1、高强度碳纤维圆管3‐2、连杆3‐3、推进电机3‐4和舵机3‐5;螺旋桨3‐1设置在无人船的尾端;高强度碳纤维圆管3‐2一端与推进电机3‐1的整流罩固定连接,另一端穿过设在船体上的推进器安装孔1‐1‐1与连杆3‐3连接;连杆3‐3与舵机3‐5连接;螺旋桨3‐1还与推进电机3‐4连接;推进电机3‐4与控制系统5的推进器控制器5‐5‐1连接;舵机3‐5与控制系统5的舵机控制器5‐5‐2连接。推进电机3‐4额定功率优选为624W,推力约245N;连杆3‐3主要由两根杆件和转向装置组成,两根杆件平行设置,两根杆件的两端分别与两个转向装置连接;控制系统5通过舵机控制器5‐5‐2控制舵机3‐5转向并通过连杆3‐3驱动高强度碳纤维圆管3‐2转动,实现对螺旋桨3‐1在水平面内的转角控制,从而实现单推进器矢量推进,获得与航向不同夹角的推力以及对应的转矩,在转矩驱动下,无人航向发生变化。
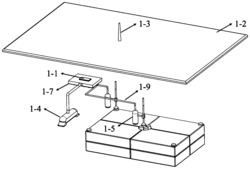
具体地,所述水质采样系统4包括:泵管4‐1、泵头4‐2、卷管器4‐3、蠕动泵4‐4、采样箱4‐5、废水排放管4‐6;泵头4‐2和蠕动泵4‐4以及蠕动泵4‐4和采样箱4‐5通过泵管4‐1连接,废水排放管4‐6将蠕动泵废水排放口与船体外部空间连接;卷管器4‐3、蠕动泵4‐4分别与控制系统5控制器模块5‐5的卷管器控制器5‐5‐3、蠕动泵控制器5‐5‐4连接;泵管4‐1用于输送水质样品,通过船艏的泵管通过孔1‐1‐2伸出船体外,优选的,泵管4‐1为耐腐蚀硅胶软管;泵头4‐2置于泵管4‐1远离蠕动泵4‐4的一端,内部装有水深传感器5‐4‐6;卷管器4‐3用于控制泵管4‐1的收放使泵头4‐2到达不同的水深处;蠕动泵4‐4负责为抽取水样提供动力;废水排放管4‐6用于排净泵管4‐1内残余海水以便水质采样系统4执行下一次采样任务;采样箱4‐5放置在采样设备舱1‐3‐2内,优选的,当无人船完成采样任务后,岸上人员可打开水密舱口盖1‐3‐8并更换采样箱4‐5。
进一步地,控制系统5包括主控计算机5‐1、定位导航模块5‐2、通信模块5‐3、数据采集模块5‐4和控制器模块5‐5。优选的,主控计算机5‐1为基于PC104总线的PCM‐9375单板计算机。
所述定位导航模块5‐2包括:GNSS天线5‐2‐1、定位差分天线5‐2‐2,GNSS信号接收机5‐2‐3;GNSS天线5‐2‐1与定位差分天线5‐2‐2设置在圆弧顶结构1‐4后部并与GNSS信号接收机5‐2‐3连接,GNSS信号接收机5‐2‐3接入主控计算机5‐1的RS‐232串口。GNSS天线5‐2‐1、定位差分天线5‐2‐2设置在圆弧顶结构1‐4的后端,GNSS信号接收机5‐2‐3设置在平台甲板1‐3后部的电器设备舱1‐3‐1内。
所述通信模块5‐3包括:数据传输天线5‐3‐1、数据传输电台5‐3‐2、视屏传输天线5‐3‐3、视屏传输电台5‐3‐4;数据传输天线5‐3‐1与数据传输电台5‐3‐2连接,数据传输电台5‐3‐2接入主控计算机5‐1的RS‐232串口;视屏传输天线5‐3‐3与视屏传输电台5‐3‐4连接,视屏传输电台5‐3‐4接入主控计算机5‐1的RS‐232串口。数据传输天线5‐3‐1负责控制及探测信号的远距离传输,数据传输天线5‐3‐1设置在圆弧顶结构1‐4的后端,数据传输电台5‐3‐2设置在平台甲板1‐3后部的电器设备舱1‐3‐1内;视屏传输天线5‐3‐3负责视频图像视频数据的远距离传输,视屏传输设置天线在圆弧顶结构1‐4的后端,视屏传输电台5‐3‐4设置在平台甲板1‐3后部的电器设备舱1‐3‐1。
所述数据采集模块5‐4包括:摄像机5‐4‐1、超声波传感器5‐4‐2、三轴捷联磁阻式电子磁罗盘5‐4‐3、智能陀螺仪5‐4‐4、三轴加速度传感器5‐4‐5、水深传感器5‐4‐6;摄像机5‐4‐1、超声波传感器5‐4‐2三轴捷联磁阻式电子磁罗盘5‐4‐3、智能陀螺仪5‐4‐4、三轴加速度传感器5‐4‐5、水深传感器5‐4‐6分别接入主控计算机5‐1的RS‐232串口;摄像机5‐4‐1可360度环视捕获无人船周边环境的实时图像信息;三轴捷联磁阻式电子磁罗盘5‐4‐3用于测定无人船航向,智能陀螺仪5‐4‐4用于测定船体横摇(Roll)、纵摇(Pitch)以及艏摇(Yaw)等姿态,三轴加速度传感器5‐4‐5用于测定无人船的空间加速度(立体空间,前后、左右、上下),水深传感器5‐4‐6安装在泵头4‐2上,用于测量泵头4‐2当前深度。
所述控制器模块5‐5包括:推进器控制器5‐5‐1、舵机控制器5‐5‐2、卷管器控制器5‐5‐3、蠕动泵控制器5‐5‐4、摄像机控制器5‐5‐5、灯光控制器5‐5‐6、语音控制器5‐5‐7;推进器控制器5‐5‐1、舵机控制器5‐5‐2、卷管器控制器5‐5‐3、蠕动泵控制器5‐5‐4、摄像机控制器5‐5‐5、灯光控制器5‐5‐6、语音控制器5‐5‐7分接入主控计算机5‐1的RS‐232串口;此外,推进器控制器5‐5‐1还与推进电机3‐4连接,用于执行主控计算机5‐1指令控制推进电机3‐4停止与启动、正反转等,优选设置在平台甲板1‐3后部;舵机控制器5‐5‐2还与舵机3‐5连接,控制舵机3‐5转向及转角并通过连杆3‐3驱动螺旋桨3‐1在水平面内同步转动,从而实现单推进器矢量推进;卷管器控制器5‐5‐3还与卷管器4‐3连接,控制卷管器4‐3伺服电机转角,实现泵管4‐1的收放;蠕动泵控制器5‐5‐4还与蠕动泵4‐4连接,控制蠕动泵4‐4抽排水;摄像机控制器5‐5‐5还与摄像机5‐4‐1伺服电机连接,用于控制摄像机5‐4‐1伺服电机转动。
优选的,所述船壳板1‐1和船体骨架1‐2、平台甲板1‐3、圆弧顶结构1‐4均由5086铝合金制成,5086铝合金质量轻,具有良好的抗腐蚀性和可焊接性,且其强度满足无人船结构强度要求。
本实用新型的具体工作方式如下:
(1)本实用新型的密闭船体空间远距离遥控海水采样的太阳能无人船顶部的柔性太阳能薄膜电池组件2‐1在阳光照射下,将光能转化为电能并将能电能输送至太阳能充电控制器2‐3,太阳能充电控制器2‐3对上述电能进行降压并输送给锂电池智能管理器2‐4进而给整个系统供电;岸基控制站发出的航速指令被数据传输天线5‐3‐1捕获并反馈给主控计算机5‐1,主控计算机5‐1向推进器控制器5‐5‐1发出控制指令;推进器控制器5‐5‐1向推进电机3‐4给定与航速相应的电压,从而使推进电机3‐4转动并驱动螺旋桨3‐1转动,螺旋桨3‐1产生向前的推力促使无人船向前加速运动;类似的,当岸基控制站发出转向指令时,控制系统向舵机3‐5给定大小或方向不同的电压,舵机3‐5转动一定的角度并通过连杆3‐3驱动螺旋桨3‐1在水平面内同步转动从而使推进器产生不同方向的推力并在水平面上产生作用在船体上的转矩,迫使无人船航向改变。
(2)与此同时:定位导航模块5‐2将获取的无人船位置、航向、加速度等信息以及摄像机捕获的图像画面反馈至主控计算机5‐1并分别通过数据传输天线5‐3‐1和视屏传输天线5‐3‐3传回岸基控制站;锂电池智能管理器2‐4识别锂电池组剩余电量,当锂电池组电量低于某一值时,对电池组实施充电,将柔性太阳能薄膜电池组件2‐1产生的剩余电能存储在当锂电池组中;当锂电池组电量达到另一较大值时,锂电池智能管理器2‐4切断充电电路,充电停止;当柔性太阳能薄膜电池组件2‐1产生的电能不足以维持无人船正常工作时,锂电池组释放储存的电能,保证无人船电能供应。
(3)进一步地,本实用新型的密闭船体空间远距离遥控海水采样的太阳能无人船在岸基操控人员的实时监控下到达指定采样地点,岸基控制站发出采样指令;卷管器4‐3伺服电机在主控计算机5‐1控制下驱动卷管器4‐3释放泵头4‐2,泵头4‐2在重力作用下拖动泵管4‐1迅速下沉;与此同时,泵头4‐2上的水深传感器5‐4‐6捕获水深信息并反馈给主控计算机5‐1,主控计算机5‐1将水深信息通过数据传输天线5‐3‐1传发送至岸基控制站,岸基控制人员在确认水深无误后,下达采样确认指令;蠕动泵4‐4在主控计算机5‐1的控制下启动,将海水样品抽取至采样箱,单个采样点采样过程完成;反复地,完成采样海域所有采样点采样工作,无人船返航;岸上人员打开水密舱盖1‐4‐6,取出采样箱4‐5,并放置新的采样箱4‐5;无人船重新出航执行新的采样任务。
(4)本实用新型的密闭船体空间远距离遥控海水采样的太阳能无人船具备一定的自主作业能力。类似地,在自主作业模式下,上述过程按预设程序指令自主完成。
(5)进一步地,在风和浪等外力作用下,本实用新型的密闭船体空间远距离遥控海水采样的太阳能无人船船体发生大角度横倾,由于锂电池舱1‐3‐3布置在水线以下较低位置,锂电池舱1‐3‐3内布置重量较大的锂电池组,对降低无人船重心高度起到主要作用,同时,在设备选型如选用质量较轻的柔性太阳能薄膜电池组件2‐1替代传统太阳能板以及总布置上对无人船重心高度进行优化,再结合密闭船体空间、V形船体剖面实现重心偏低,浮心偏高,浮心在重心之上,重力与浮力的耦合作用产生较大的复原力矩,船体横倾角迅速归于零;极限状态下,除柱形水密浮力舱1‐3‐6外船体各水密舱室均破损进水,浮力大幅度损失,进入船体内部的海水使得部分淹没的柱形水密浮力舱1‐3‐6产生与船体质量等大的浮力,本实用新型的密闭船体空间远距离遥控海水采样的太阳能无人船可保持漂浮状态而不至于沉入海底,减少财产损失。
需要说明的是,任何不经过创造性劳动想到的变化或替换,都应涵盖在本实用新型的保护范围之内,本实用新型的保护范围应该以权利要求书所限定的保护范围为准。
一种密闭船体空间远距离遥控海水采样的太阳能无人船专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0