











专利摘要
振幅、频率精确可控的3D振动设备及其制造方法,包括机架及其上的振动台、电动机、容器和工控机,其特征在于振动台上面叠落着导向板并在其上安置容器,容器固定板和导向板之间均安装滑块和X、Y、Z三个方向的导轨,配置变频调速器的三个电动机分布在机架的不同位置,电动机的输出轴通过不同偏心度的偏心轮组与中、下层的X、Y向的两个水平撞杆、上层Z向的下顶杆连接,两个水平撞杆各自配置复位器,水平撞杆和下顶杆均与各自的轴承相接触。本程序使用VC.2003实现上位机界面的振动控制,PLC中为每个模块设置一个电机开关,并在界面上显现,各模块内的程序可通过界面修改,控制程序赋予该设备自动执行功能,本发明为生产中提高松装密度的有效方法,对未来改善颗粒材料产品的性能十分关键。
说明书
技术领域
本发明涉及物理实验设备,一种振幅和频率都精确可控的3D振动设备,用于冶金、材料及化工领域的散体粒子在振动条件下的堆积致密化、流态化、混料和分离及抑制偏析等方面的研究。
背景技术
实现冶金、材料及化工领域的散体粒子的堆积致密化、流态化、混料及分离现象的一种有效方式是使用振动,尤其是对粒子堆积的致密化,通过振动可以使粒子堆积实现从疏松向致密的转变,目前国内外已有的振动设备主要实现的是一维(1D)竖直方向的振动,而这种振动设备通常对粒子堆积密度提高的幅度有限。例如,以同一尺寸球形粒子在1D振动条件下的堆积致密化为例,其国际上公认的最大堆积密度约为0.64,这是随机堆积的范畴,也就是说,现有的1D振动设备只能实现粒子堆积的无定形态或非晶态的结构。而用1D振动设备振动,则很难实现堆积密度比较高的晶态结构。
为了实现粒子的更密堆积,虽然也有人设计了3D的振动设备,其结构如图5所示。该设备尽管可以在一定程度上突破1D振动获得高密度的瓶颈,但获得的高密度仍然有限,而且可以看出无论是对振动频率的控制还是振幅的控制都是定性的,即实验结果的可重复性差。现有的其它3D振动设备也是如此,而且部分还是采用电磁振动,设备复杂,实验参数的可选择范围窄,价格昂贵。实际上,需要准确的操作参数实现粒子的致密堆积。
发明内容
本发明的目的是提供一种振幅、频率精确可控的3D振动设备及其制造方法,实现振动台上容器的三维振动,单独或同时振动且每个方向上振动的振幅和频率都能通过程序精确可控。
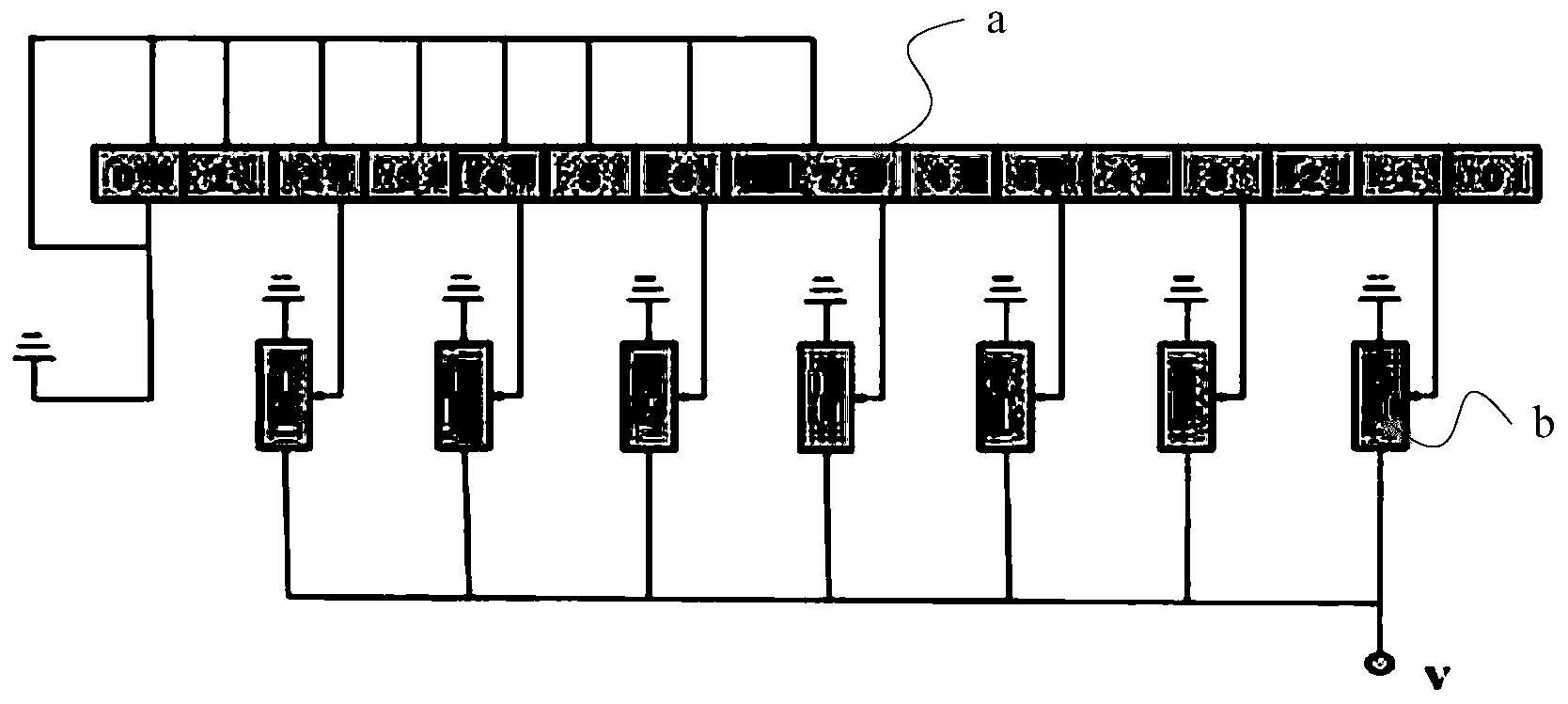
振幅、频率精确可控的3D振动设备,包括位于机架上的振动台、电机、容器和工控机,其特征在于振动台上面叠落着导向板和容器固定板并在其上安置容器,容器固定板和导向板之间均安装滑块和X、Y、Z三个方向的导轨,配置变频调速器的三个电动机分布在机架的不同位置,电动机的输出轴通过不同偏心度的偏心轮组中的轴承与中、下层的X、Y方向的两个水平撞杆、上层Z向的下顶杆连接,两个水平撞杆各自配置复位器,复位器分别与X和Y向导板的一端连接,实现各自的水平复位。制造方法:本程序使用VC.2003实现上位机界面的振动控制,设计五个控制模块,分别为:玻璃球1D振动、玻璃球2D振动、玻璃球3D振动、二元钢球1D振动、二元钢球3D振动控制功能程序,与电源、电机、变频调速器和通讯总线联通的PLC中为每个模块设置一个电机开关,并在界面上显现独立控制数值设置,各模块内的程序可通过界面修改,设定作业数据后,控制程序赋予该设备自动执行功能。
本发明设备可以在工控机控制程序的界面上选择三个方向的任意一个或同时振动作业。水平方向复位器的使用保证了振动的连续性,在竖直方向振动台、容器及容器内散体粒子的自身重量外加与导套接触的弹簧起到了复位器的作用。另外,方便更换且尺寸精度很高的偏心轮及可在很宽范围内变化的变频调速器的使用,使本发明的设备足够精确的控制每一振动方向的振幅及频率。本发明的设备提供了一种实际颗粒材料制备过程中提高松装密度的有效方法,这对未来改善颗粒材料产品的性能十分关键。
附图说明
图1是根据本发明的振幅、频率精确可控的3D振动设备的示意图;
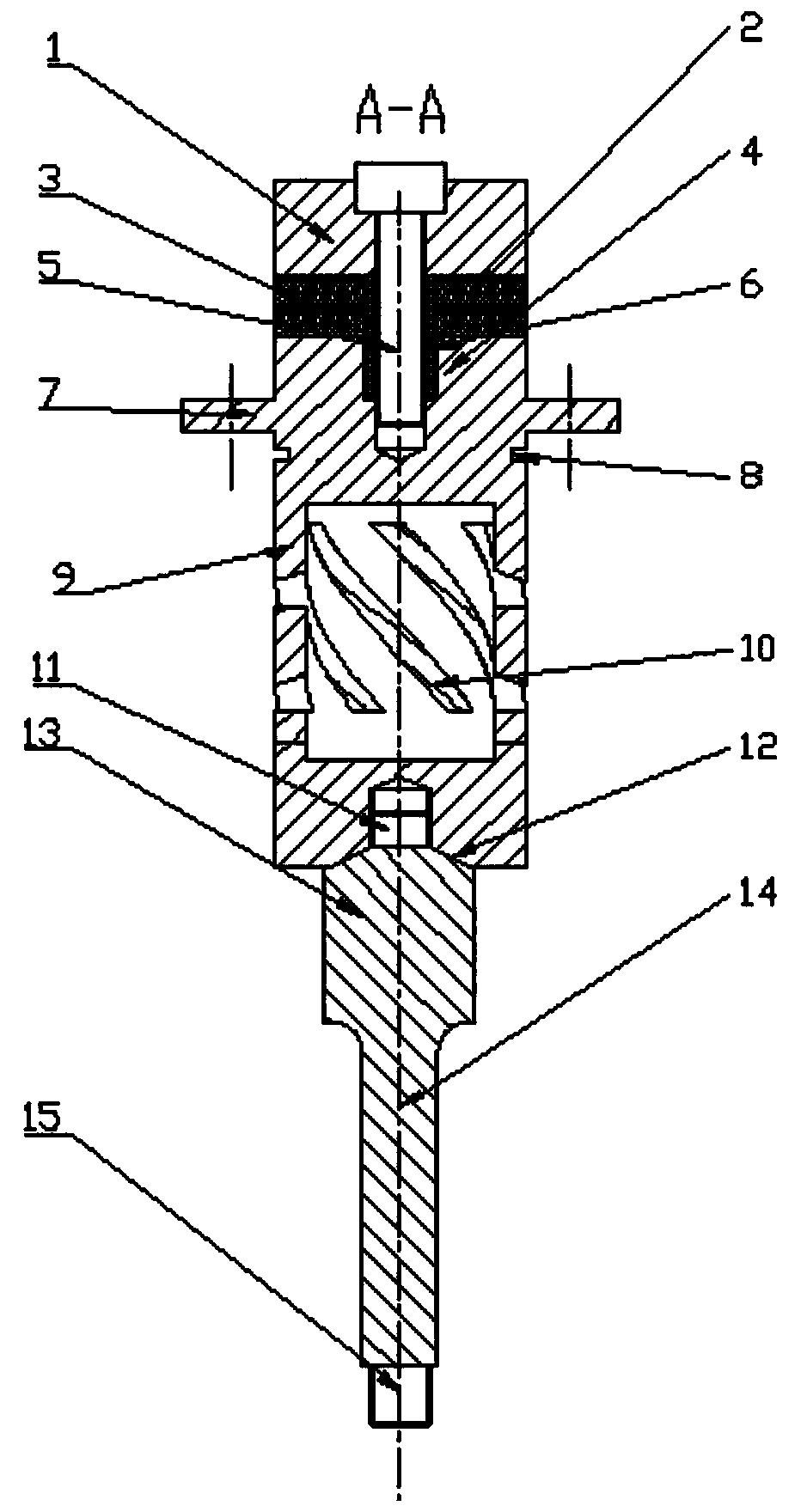
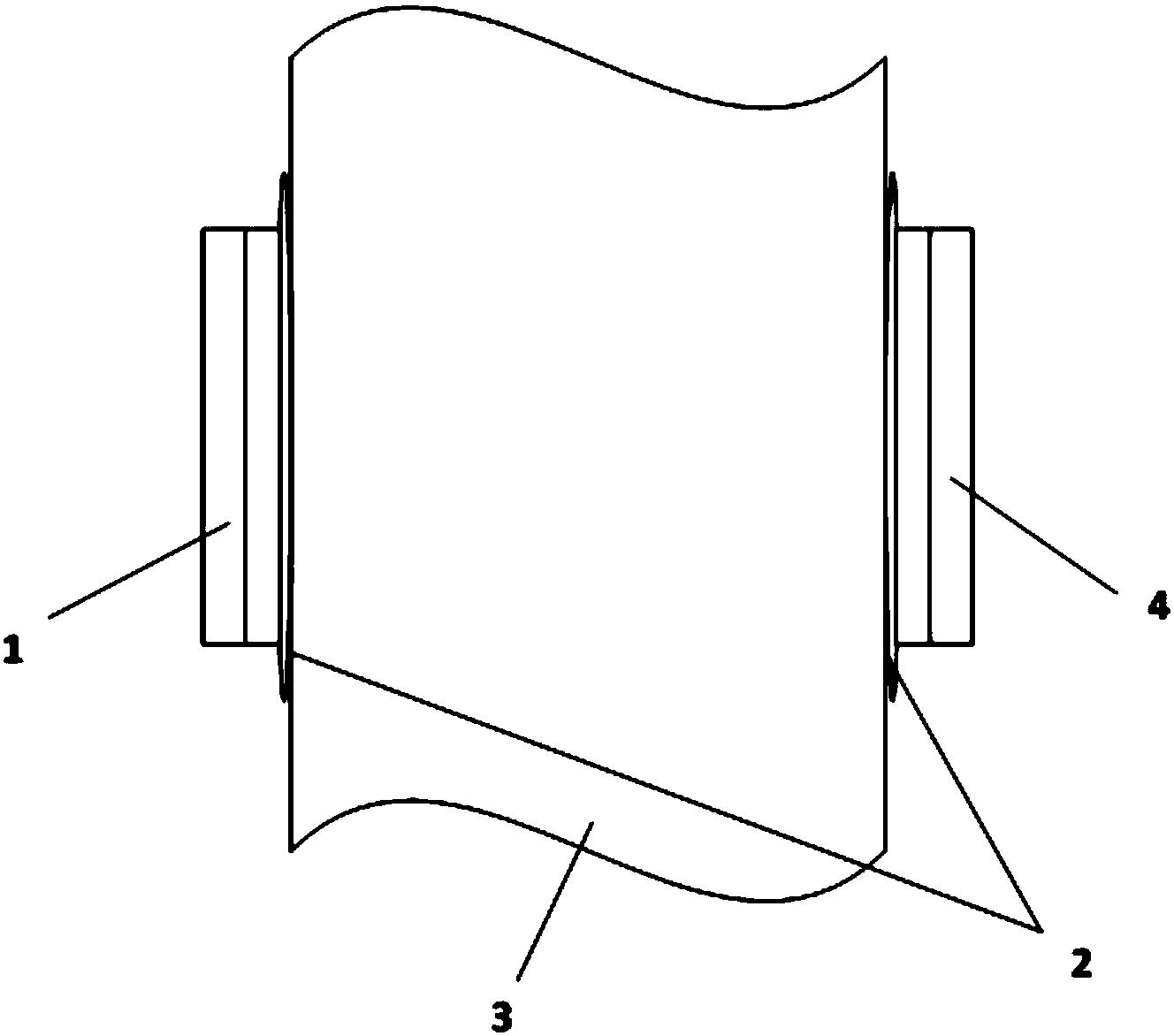
图2是图1中3D振动设备的振动台结构示意图;
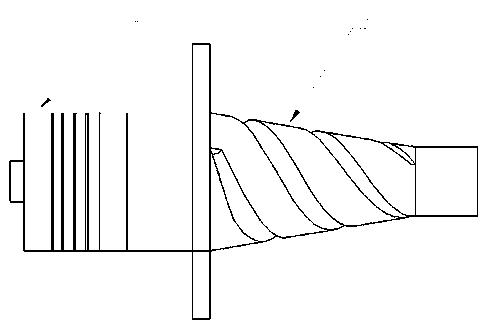
图3是偏心轮组示意图;
图4是复位器示意图;
图5是现有技术3D振动设备的原理示意图;
图6是程序控制本发明3D振动设备的工控界面图;
图7是工控界面的单一尺寸玻璃球1D振动参数设置对话框;
图8工控界面的单一尺寸玻璃球2D振动参数设置对话框;
图9工控界面的单一尺寸玻璃球3D振动参数设置对话框;
图10工控界面的二元钢球1D振动参数设置对话框;
图11工控界面的二元钢球3D振动参数设置对话框;
图12(a)为粒子在1D连续振动和整体加料条件下的最大堆积密度为0.636;
图12(b)为无限大容器中粒子的最大堆积密度为0.6632;
图13为D振动条件下不同加料批量所对应的无限大容器中粒子的堆积密度。
具体实施方式
参照附图详细描述实施例的振幅、频率精确可控的3D振动设备和制造所述振动设备的方法。
本实施例参照附图1所示,在底座机架1上面中心安置振动台2以及容器9,三个电动机3a,3b,3c分别通过各自的偏心轮组5与振动台2中、下层的X、Y方向的两个水平撞杆6、上层Z向的下顶杆7连接,两个水平方向导板23和24各自配置复位器4,水平撞杆6和下顶杆7均与各自的偏心轮组5中的轴承32相接触。
图2所示振动台2结构:振动台2固定在机架1的两根横梁及下联板20上,底层的两根Y方向导轨21a分别固定在下联板20的上表面且相互平行,Y方向导轨21a上各有两个滑块22a分别固定在Y向导板23的下表面,滑块22a在Y向导轨21a上的运动实现了Y向导板23在水平Y向上的运动;两根X方向导轨21b分别固定在Y向导板23上表面与Y方向导轨21a相垂直的两平行边,每根导轨21b上的两个滑块22b分别固定在X向导板24的下表面;在X向导板24上表面固定竖直的Z向导柱21c,每根导柱21c上都有一个可以滑动的导套26与容器固定板25相联,导套26的上端与弹簧27的下端接触,弹簧27的上端由夹紧器28固定;振动台2上四个Z向导柱21c通过四个纵向导套26实现容器9竖直Z向的运动。容器9固定在容器固定板25上,并随容器固定板25做给定模式下的振动。
图3中所述偏心轮组5由偏心轮30,法兰31及轴承32构成,不同偏心度的偏心轮30通过法兰31分别与各电动机3a,3b,3c的输出轴键合,每个偏心轮30上有一轴承32与相对应的水平撞杆6和下顶杆7接触。
容器固定板25的下方与下顶杆7相联,下顶杆7的另一端与偏心轮组5上的轴承32相接触,偏心轮组5与Z方向电动机3c的输出轴键合,从而实现容器9在竖直方向上给定振幅的振动,偏心程度不同,对应的振动幅度也不相同。两个水平撞杆6的一端分别与振动台2上的Y向导板23和X向导板24的一端相联,另一端分别和与水平方向电动机3a,3b相键合的偏心轮组5中的轴承32相接触。Y向导板23和X向导板24的另一端则分别与各自复位器4的一端相联,复位器4的另一端固定在机架1上,从而实现容器9在水平方向上的往复运动。见图4,每个复位器都是由两个弹簧座41及螺栓42中间固定一个复位弹簧40构成,两个复位器中一端的弹簧座41分别与固定在机架1上的弹簧支座相连,另一端弹簧座41分别与振动台2上的X向导板24和Y向导板23相连。
在机架1的上方分别固定一块电动机垫铁8调节电动机3a,3b的高度,以便使电动机3a输出轴的轴心与振动台2的Y向导板23处于同一高度,使电动机3b输出轴的轴心与振动台2的X向导板24处于同一高度,从而使每个输出轴上连接的轴承32都能与水平撞杆6接触良好,较好地实现每个方向上能量的传递。在机架1的内部有两根槽钢,用来固定竖直方向驱动的电动机3c,偏心轮组5通过法兰31与电动机3c的输出轴相键合, 偏心轮组5上的轴承32与下顶杆7接触,竖直Z向上没有复位器,每次振动后通过重力复位。
电动机3a,3b,3c分别由变频调速器控制每个电动机的转数,从而实现容器9在每个方向上不同频率的振动。如果关闭水平方向上的两个电动机3a,3b,只保留竖直方向上的电动机3c,则图1所述的设备可以实现粒子在1D振动条件下的堆积,且竖直方向上的振动幅和频率精确可控;如果关闭竖直方向上的电动机3c,只保留水平方向上的两个电动机3a,3b,则图1所述的设备可以实现粒子在2D(即水平方向上)振动条件下的堆积,且水平两个垂直方向上振动的振幅和频率都精确可控;如果水平和竖直方向上的三个电动机3a,3b,3c全部打开,则图1所述的设备可以实现粒子在3D(三个互相垂直的方向上)振动条件下的堆积,且在每个方向上振动的振幅和频率都精确可控。
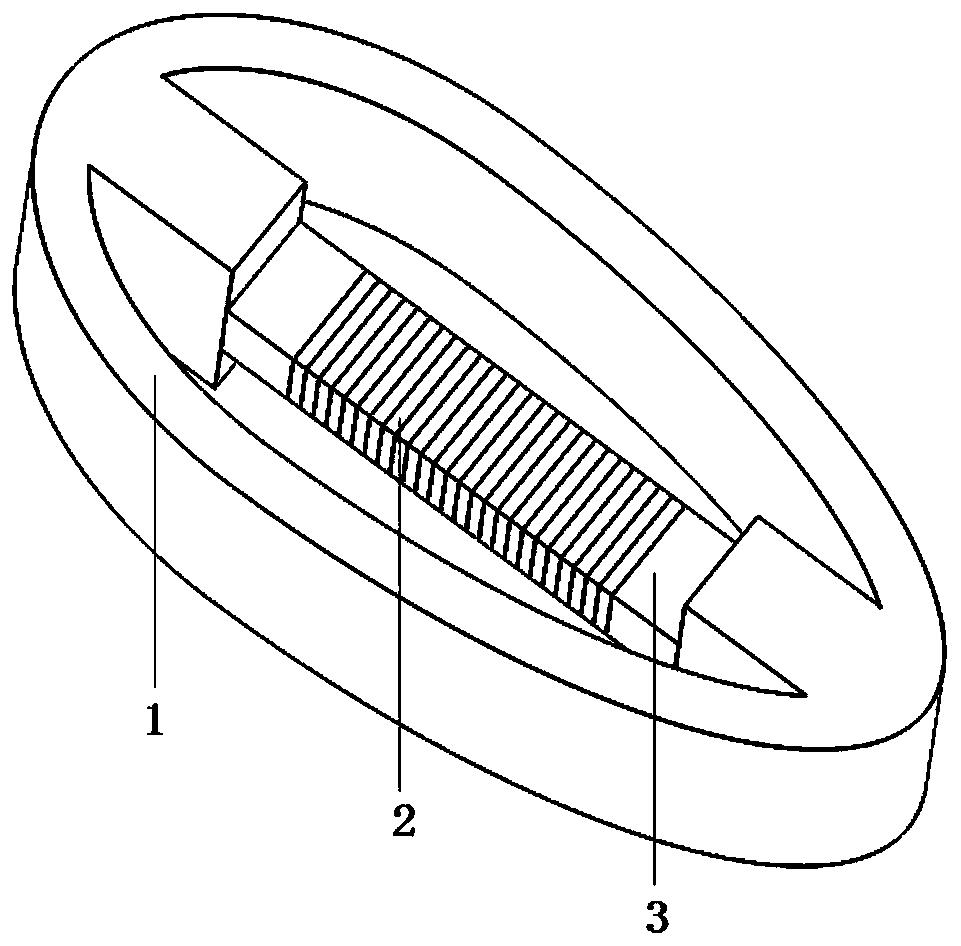
在容器9的圆周四等分处分别标有刻度,从而很容易计算出容器9内粒子堆积的高度,方便实验过程中读数。
本发明设备的制造方法,其特征在于振动作业自动控制程序:本程序使用VC.2003实现工控机界面的控制程序输入、修订,设计五个控制模块,分别为:玻璃球1D振动、玻璃球2D振动、玻璃球3D振动、二元钢球1D振动、二元钢球3D振动控制功能程序,与电源、电机、变频调速器和通讯总线联通的PLC中为每个模块设置一个电机开关,将每个电动机的驱动单独控制,并在界面上显现,各模块内的程序可通过界面修改,设定作业数据后,控制程序赋予该设备自动执行功能。
本设备的自动振动控制程序:
一、基本功能及接口函数
二、五个控制模块函数
各种模式的振动都是通过图6的工控界面来实现,对于不同的振动模式,会有不同的参数输入,因此在每种模式选择时,通过一个对话框输入振动参数。操作员在人机对话界面设置作业要求,见图7单一尺寸玻璃球1D振动参数设置对话框。通过InitParameter()函数,完成参数的输入。具体控制函数如下:
单一尺寸玻璃球1D振动
单一尺寸玻璃球2D振动,见图8单一尺寸玻璃球2D振动参数设置对话框。
单一尺寸玻璃球3D振动,见图9单一尺寸玻璃球3D振动参数设置对话框。
两种不同尺寸钢球的1D振动,见图10二元钢球1D振动参数设置对话框。
二元钢球3D振动,见图11二元钢球3D振动参数设置对话框。
实验操作实例1:
使用本发明设备,通过关闭水平方向(即X和Y方向)的振动,而只打开竖直Z方向振动,实现了单一尺寸玻璃球在1D振动条件下堆积致密化的物理实验,以验证工艺参数如振幅A、振动频率ω、振动强度Γ(定义为Aω2/g)以及容器的尺寸对粒子堆积密度的影响,结果发现,粒子的堆积密度都是先随着振幅A或振动频率ω的增加而增大,达到最大值后则随着A或ω的进一步增加而降低,即存在一个最佳的A和ω实现粒子的最密堆积。振动强度Γ虽然体现了A和ω的共同作用,并具有与A或ω的相同影响趋势,但研究发现,在振动强度相同的情况下粒子的堆积密度也不同,这说明不能仅用一个参数Γ来表征粒子的堆积致密化,而应分别考虑A和ω的影响。实验过程中,通过消除容器尺寸的影响而得到的无限大容器中,粒子在1D连续振动和整体加料条件下的最大堆积密度为0.636见图12(a)所示,这一结果是公认的单一尺寸粒子随机密排的最大密度,它不仅与其它研究者的数值仿真与物理实验结果具有很好的一致性,同时也验证了我们的数值仿真结果。此外,通过改变加料方式,例如从原来的整体加料变成分批加料,此设备1D振动突破了随机密排最大密度约0.64的瓶颈,消除容器尺寸影响后,所获得的无限大容器中粒子的最大堆积密度为0.6632,如图12(b)所示,分析发现此密排结构已经不同纯随机的了,而是从随机向有序进行转变。
图12(a)A=0.1d时,为消除容器尺寸的影响而进行的不同尺寸容器中粒子堆积密度的外推,其中:(a)整体加料;(b)分批加料。图12(a)中的方程是对每种情况的线性拟合,x=d/D(d表示粒子直径,D表示容器的内径)。
本实验的意义在于:(1)通过使用所发明的3D振动设备中1D振动功能,可以从物理实验上实现粒子从随机松排向随机密排的转变,即最大无规密排结构(堆积密度约为0.64)的实现,这为通过硬球的堆积研究材料的无定形结构或非晶态结构的形成机理具有重要意义;(2)通过改变加料的方式及选取适当的振动参数,所发明的设备能够通过1D振动实现随机密排最大密度的突破,表明可以获得比0.64更密的堆积,但此时的密排结构已经不是纯随机的了。
实验操作实例2:
与1D振动相对应地是,采用所发明的设备,我们也实现了单一尺寸玻璃球在3D振动条件下的堆积致密化,除研究了振幅A、振动频率ω、振动强度Γ、容器尺寸的影响外,我们还系统研究了批量加料过程中每次加入粒子批量的影响、最密堆积结构的表征及致密化机理的分析。图13给出了不同振动条件下无限大容器中粒子的堆积密度,可以看出,通过合理地控制实验条件,可以获得的最大堆积密度约为0.74。大约四百年前,Kepler就预言宇宙中同一尺寸球的最大堆积密度为0.74,即完美面心立方FCC或密排六方HCP的堆积密度,而这一结构已经通过我们的3D振动物理实现了,对所获得的粒子堆积结构的表征发现,它属于{111}取向的FCC晶体。
图13所示为A=0.4d,ω=55Rad/s的3D振动条件下不同加料批量所对应的无限大容器中粒子的堆积密度,其中:(◆),加料批量NB=1层/批;(▲),NB=2层/批;(●),NB=3层/批。图13中的方程是对每种情况的线性拟合,内插图表示NB=1层/批时,除去表面几层粒子后得到的有序结构。
除获得最密堆积外,我们也研究了其形成的机理,研究发现,在3D振动堆积过程中加入的彩色粒子层在致密化过程中除在容器壁附件外,在其它位置上并没有发生大的扩散,这表明振动堆积过程中,一旦有序结构形成,它将起到后续加入粒子模板的作用而做整体运动,这一点已经通过我们的数值模拟得到证实。
本实验的意义在于:(a)通过3D振动和批量加料,所发明设备能够实现粒子堆积从无序向有序的转变,对同一尺寸球形粒子而言,所获得的最大堆积密度可达0.74,结构表征发现其为FCC晶体;(b)3D振动有序化的机理为:一旦振动过程中形成了有序结构,它将作为后续加入粒子有序堆积的模板;(c)所发明设备的3D振动物理实验不仅验证了我们现有的数值仿真结果,更重要地是它为研究硬球的结晶过程及机理提供了一个良好的思路,具有重要的理论和实际意义,同时也为未来颗粒材料制备过程中高初始堆积密度的形成提供参照。
二元钢球1D振动控制程序模块也可以用作进行二元钢球2D振动,1D、2D和3D的振动程序结构相同,只是参数不同;每个控制模块中必须有的设备项是振动设置开关,如电动机开关及变频器开关,根据不同的振动模式,选择打开不同的开关,每种开关打开后,其输入值可以根据实验要求进行修改。
振幅、频率精确可控的3D振动设备及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0