








专利摘要
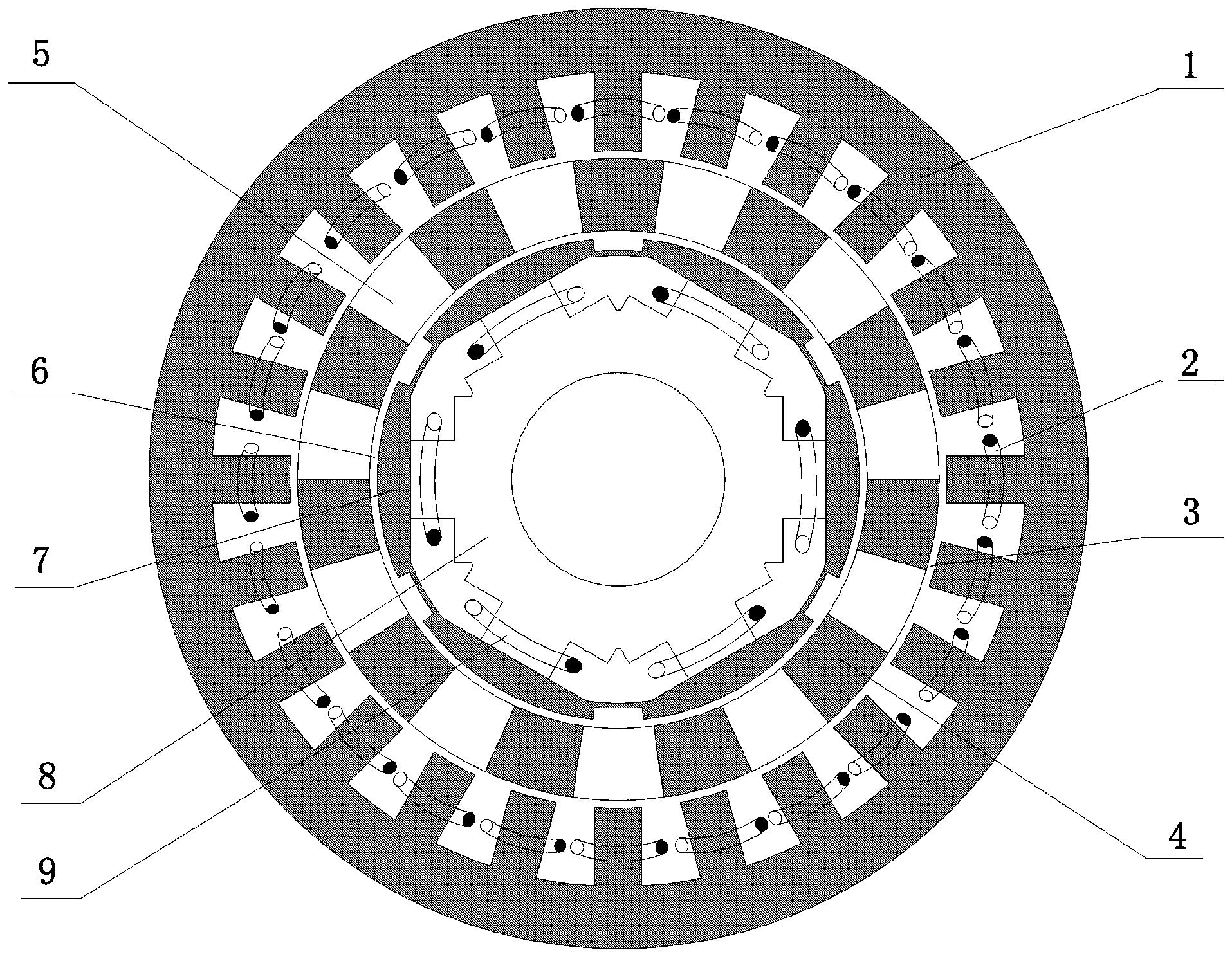
一种低温超导球形转子驱动装置,包括转子(1)、电机A相绕组(2)、电机B相绕组(3)、转子内孔窗口(4)、起始位置传感器(5)、电机控制传感器(6)、起始位置信号图形(7)、电机控制信号图形(8);并包括一个起始位置信号图形(7)和四个电机控制信号图形(8),每个图形为梯形。由光纤传感器检测转子旋转时的窗口位置信息,通过信号处理变换得到控制转子加速的时序信号,该时序信号经直流脉冲电源进行功率放大后,以脉冲电流形式供给电机两相绕组,电机两相绕组连续交替通电驱动转子旋转。本发明增加了电机驱动作用时间,提高了启动加速效率,使转子快速进入高速稳定旋转状态。
说明书
技术领域技术领域
本发明涉及超导转子旋转的驱动装置及其驱动方法,特别涉及一种低温超导球形转子旋转的驱动结构及方法。
技术背景背景技术
低温超导转子悬浮和旋转驱动原理都是基于超导体的迈斯纳效应。迈斯纳效应可以理解为处于超导态的超导体的电阻和磁导率均为零,可把它看成为理想的反磁体,外磁场磁力线无法穿入到超导体的内部。外磁场的磁力线平行于超导体表面,在超导体表面感生出的超导电流产生的磁场方向恰好与外磁场方向相反,两个磁场相互作用产生磁作用力表现为非接触式的机械力的形式使超导转子悬浮和旋转起来。迈斯纳效应的特点是设计超导转子旋转方法和仪器装置的理论基础和出发点。对于超导体表面磁压力的大小和方向,有以下两个结论:第一,磁场中的超导体表面受到的磁压力的方向垂直于超导体表面向里。第二,单位面积上磁压力的大小与超导体表面的磁感应强度的平方成正比,即f=B2/2μ0。另外,转子旋转加速度与转子受到的转动合力矩和转子的转动惯量有关,即a=M/J。
超导材料和低温技术的不断发展,对新型精密仪器装置设备的研制起着巨大的推动作用。超导体独特的物理特性能有着其它材料不可比拟的应用优势,尤其是超导磁悬浮技术越来越受到广泛关注。超导转子的旋转要有超导转子的稳定悬浮作为前提条件,超导磁悬浮技术有很多优点:首先整个悬浮系统工作在低温环境下,材料的化学活动性、膨胀系数等都大大降低;其次超导体的零电阻和迈斯纳效应使其能量损耗几乎为零。此外超导磁悬浮具有自适应稳定性,转子可承受较高的过载能力。把超导电性和经典力学理论相结合可得到稳定的超导磁悬浮,同时这种非接触式的悬浮可以在无能量损失的情况下稳定运行。超导磁悬浮技术的这些特点为发展高精度器件和仪器装置奠定了基础。
国内文献【光纤传感测量系统在超导球形转子中的应用,胡新宁等,光学精密工程,2008,16(11):2092-2097】中设计用于驱动的电机控制信号图形为八个,驱动时A、B两相电机间隔性交替通电驱动转子旋转,不是两相电机绕组交替连续通电,驱动作用时间少,效率低、因此以上所述的驱动方法不能满足简便、稳定、加速效率高的要求。
发明内容发明内容
本发明的目的是克服现有技术的上述缺点,实现球形转子的稳定快速加速旋转。本发明提出一种超导球形转子驱动方法。该驱动方法能够满足超导球形转子驱动简便、稳定、加速效率高的要求。
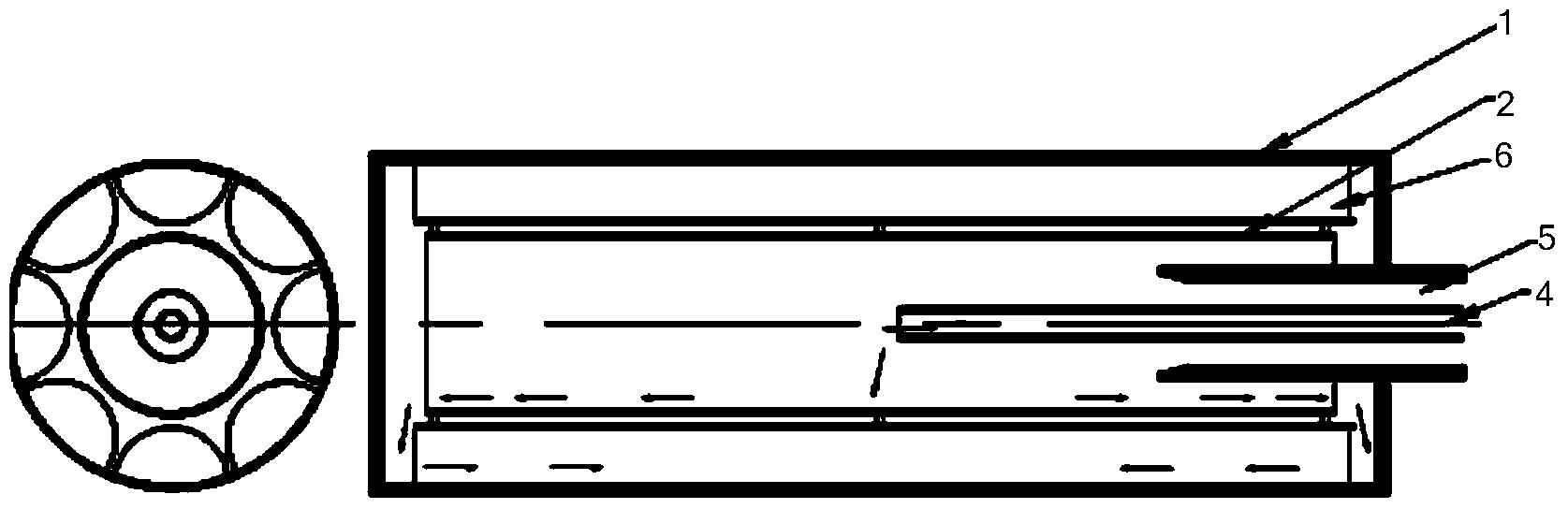
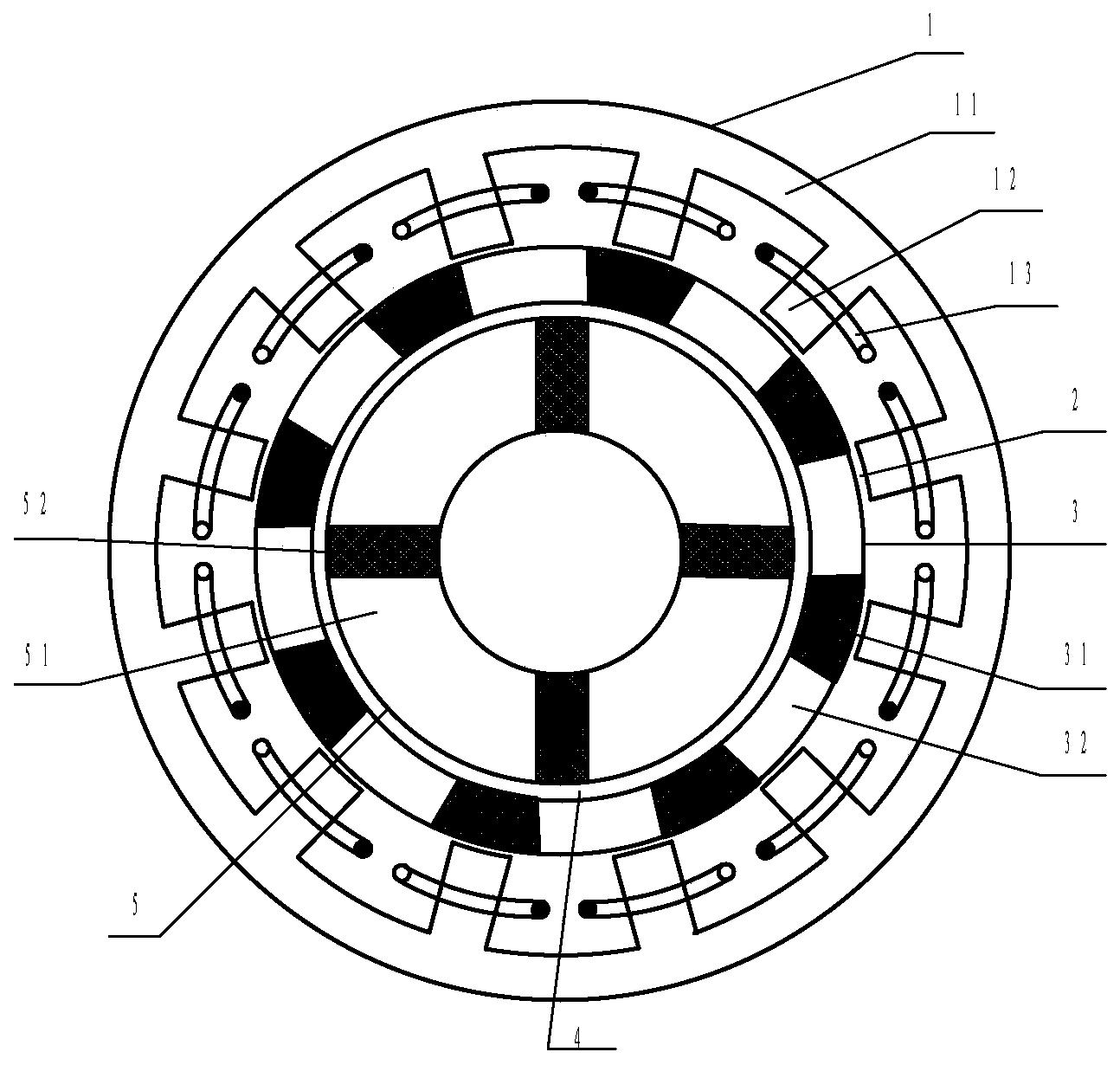
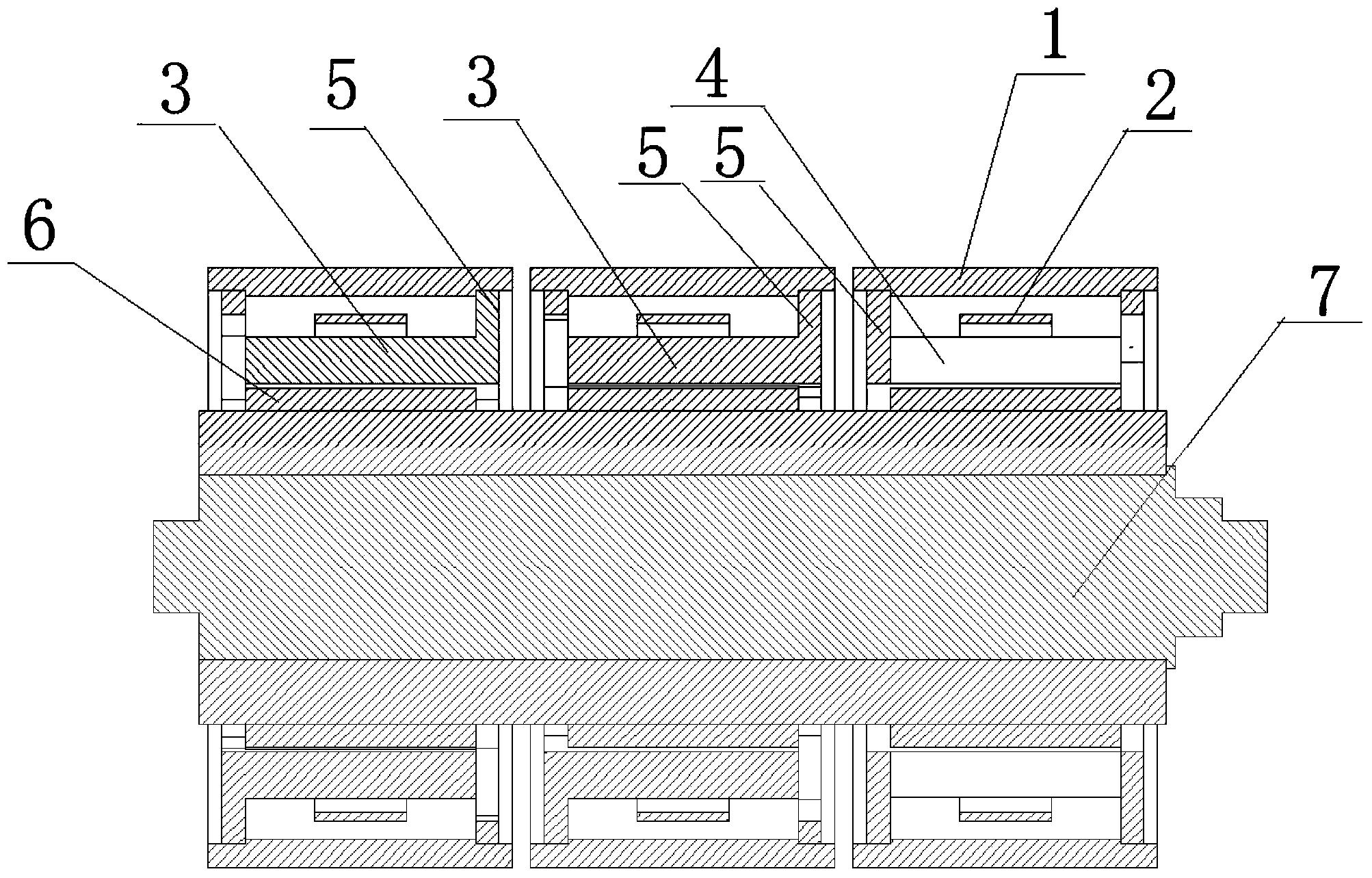
本发明的球形转子由超导金属材料制作,并有圆柱形内孔,孔内装入带有超导线圈的中心柱作为电机的定子。球形转子内孔壁中部一周带有等间隔的4个环形窗口,用来做电机电磁推力的作用面。球形转子套在中心柱上,中心柱内电机的定子上有八组线圈,其中四组串联在一起作为A相,另外四组串联在一起作为B相。
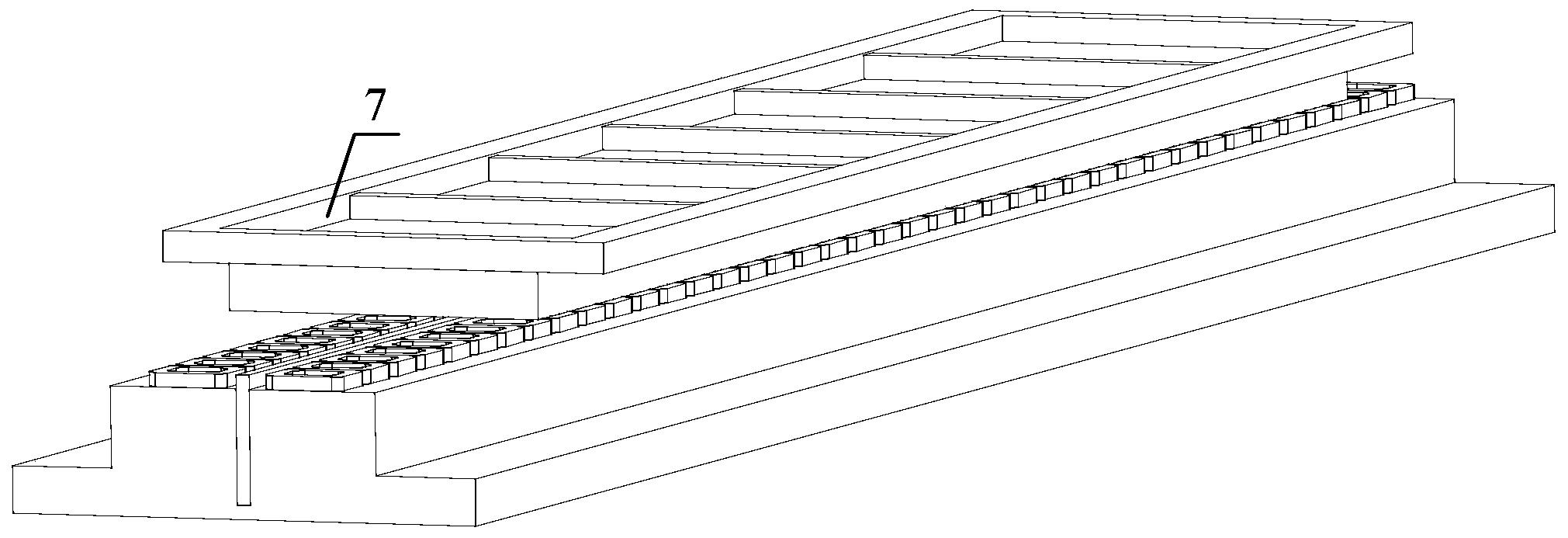
本发明低温超导球形转子驱动装置还包括一个起始位置信号图形和四个电机控制信号图形,每个图形均为梯形;起始位置信号图形是在超导球形转子顶部平面上的梯形漫反射图形,其梯形两腰延长线交角成45°;四个电机控制信号图形是在超导球形转子顶部平面上的梯形漫反射图形,其梯形两腰延长线交角成45°,四个电机控制信号图形在一周内等间隔分布。起始位置信号图形与其相邻的电机控制信号图形相位相差22.5度。
本发明采用非接触式方法驱动超导球形转子高速旋转。利用起始位置传感器探测起始位置图形后输出的波形与电机控制传感器输出的波形比较,判别转子的旋转方向。利用安装在球形转子顶部上方的电机控制传感器检测球形转子旋转时的窗口位置信息,通过电机控制传感器的逻辑处理电路将信号处理变换得到控制转子加速的时序信号,该时序信号通过信号线传给直流脉冲电源进行功率放大,直流脉冲电源输出脉冲电流供给电机两相绕组。电机两相绕组产生的磁场在球形转子的窗口侧壁面上形成电磁转动力矩推动转子旋转。
当球形转子顺时针旋转时,电机控制传感器探测到电机控制信号图形后输出高电平,此时电机控制传感器的逻辑处理电路将信号处理后传给直流脉冲电源,直流脉冲电源对信号进行功率放大后输出供给电机A相绕组通电,当球形转子转过45度后,电机控制传感器开始输出低电平,此时逻辑处理电路将信号处理成高电平后传给直流脉冲电源,直流脉冲电源对信号进行功率放大后输出供给电机B相绕组通电。当球形转子再转过45度后,逻辑处理电路将信号处理后传给直流脉冲电源,直流脉冲电源对信号进行功率放大后输出再给电机A相绕组通电,如此电机的A、B两相绕组连续交替通电,球形转子每转一周,电机A和B相绕组连续交替通电各4次。当球形转子逆时针旋转时,电机控制传感器探测到电机控制信号图形后产生高电平,此时电机控制传感器的逻辑处理电路将信号处理后传给直流脉冲电源,直流脉冲电源对信号进行功率放大后输出供给电机B相绕组通电。当球形转子转过45度后,电机控制传感器开始输出低电平,此时逻辑处理电路将信号处理成高电平后传给直流脉冲电源,直流脉冲电源对信号进行功率放大后供给电机A相绕组通电。球形转子再转过45度后,电机控制传感器的逻辑处理电路将信号处理后传给直流脉冲电源,直流脉冲电源对信号进行功率放大后输出再给电机B相绕组通电,如此电机A、B两相绕组连续交替通电,转子每转一周,电机A和B相绕组连续交替通电各4次。
本发明驱动方法使驱动电机A、B两相连续交替不间断的通电,增加了电机驱动作用时间,提高了球形转子启动加速效率。
附图说明附图说明
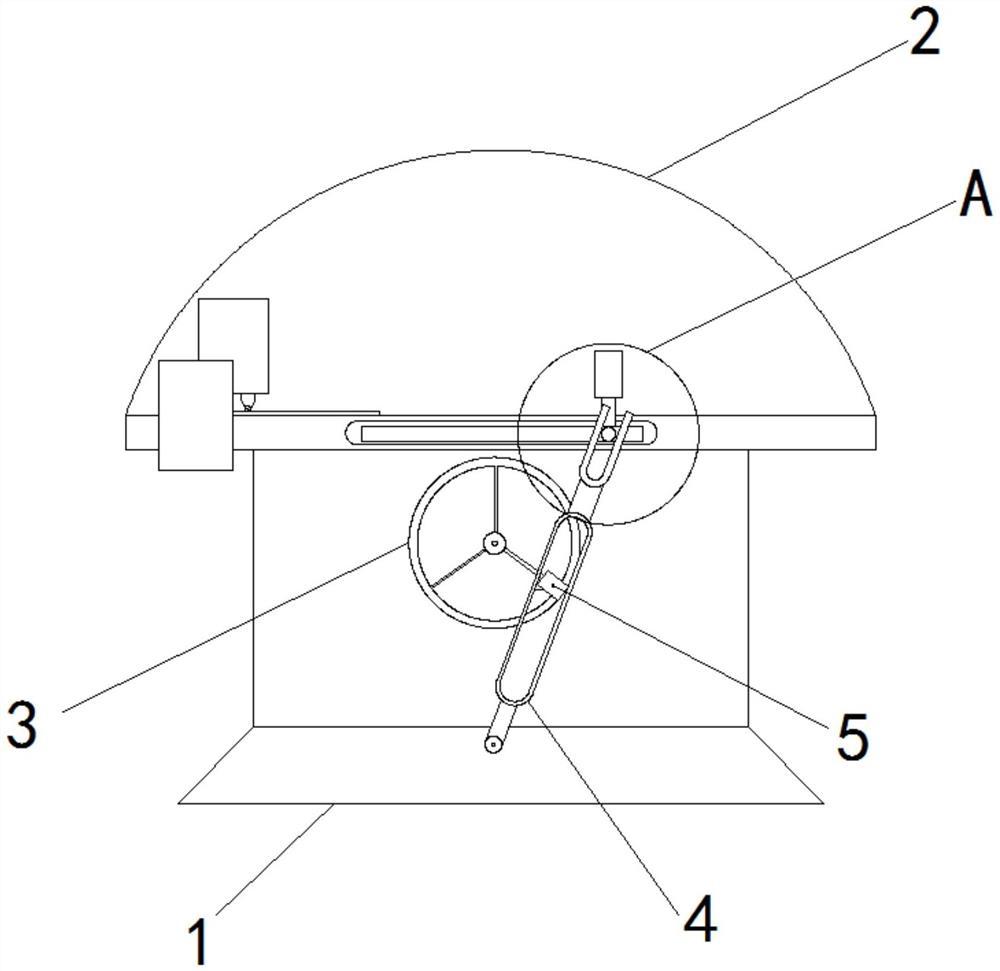
图1是球形转子驱动结构示意图,图中:1球形转子、2电机A相绕组、3电机B相绕组、4转子内孔窗口、5起始位置传感器、6电机控制传感器、7起始位置信号图形、8电机控制信号图形;
图2球形转子顺时针旋转驱动信号逻辑处理时序图;201顺时针起始位置波形、202顺时针电机控制波形、203顺时针电机A相信号波形、204顺时针电机B相信号波形;
图3球形转子逆时针旋转驱动信号逻辑处理时序图;301逆时针起始位置波形、302逆时针电机控制波形、303逆时针电机A相信号波形、304逆时针电机B相信号波形;
图4球形转子旋转驱动原理图。9球形转子内孔窗口左侧壁、10球形转子内孔窗口右侧壁。
具体实施方式具体实施方式
下面结合附图及具体实施方式对本发明进一步说明。
如图1所示,本发明低温超导球形转子驱动装置包括球形转子1、电机A相绕组2、电机B相绕组3、转子内孔窗口4、起始位置传感器5、电机控制传感器6、起始位置信号图形7、电机控制信号图形8。起始位置信号图形7是在超导球形转子顶部平面圆心处沿着直径方向4mm处刻制的一个高为2.5~3mm,梯形两腰延长线交角成45°夹角的梯形漫反射图形;四个电机控制信号图形8是在超导球形转子顶部平面圆心处一周内沿着直径方向7mm处刻制的高为2.5~3mm,梯形两腰延长线交角成45°夹角的梯形漫反射图形,四个电机控制信号图形8在一周内等间隔分布。起始位置信号图形7与其相邻的电机控制信号图形8相位相差22.5度。
本发明利用起始位置传感器5探测起始位置信号图形7后,输出波形与电机控制传感器6输出的波形比较,判别球形转子1的旋转方向。利用电机控制传感器6探测球形转子1旋转时的窗口位置信息,通过电机控制传感器6的逻辑处理电路进行信号处理变换,得到控制球形转子1加速的时序信号,该时序信号通过直流脉冲电源进行功率放大后,以脉冲电流形式供给电机A相绕组2和电机B相绕组3。利用电机绕组产生的磁场在球形转子1的转子内孔窗口的侧壁面上形成电磁转动力矩推动转子旋转。
如图2所示,当球形转子1顺时针旋转一周时,起始位置传感器5输出顺时针起始位置波形201,电机控制传感器6输出顺时针电机控制波形202。利用在球形转子1顶部上方的电机控制传感器6探测到电机控制信号图形8后输出高电平,此时电机控制传感器6的逻辑处理电路将信号处理后传给直流脉冲电源,直流脉冲电源对信号进行功率放大后输出,供给电机A相绕组2通电,当球形转子1转过45度后,电机控制传感器6开始输出低电平,此时电机控制传感器6的逻辑处理电路将信号处理成高电平后传给直流脉冲电源,直流脉冲电源对信号进行功率放大后输出,供给电机B相绕组3通电。球形转子1转过45度后,再给电机A相绕组2通电,如此电机A相绕组2和电机B相绕组3连续交替通电,球形转子1每转一周,电机A相绕组2和电机B相绕组3连续交替通电各4次。203是顺时针电机A相信号波形,204是顺时针电机B相信号波形,203和204均为高电平通电,低电平不通电。
如图3所示,当球形转子1逆时针旋转一周时,起始位置传感器5输出逆时针起始位置波形301,电机控制传感器6输出逆时针电机控制波形302。电机控制传感器6探测到电机控制信号图形后输出高电平,此时电机控制传感器6的逻辑处理电路将信号处理后传给直流脉冲电源,直流脉冲电源对信号进行功率放大后输出,供给电机B相绕组3通电,当球形转子1转过45度后,电机控制传感器6开始输出低电平,此时电机控制传感器6的逻辑处理电路将信号处理成高电平后传给直流脉冲电源,直流脉冲电源对信号进行功率放大后,输出供给电机A相绕组2通电。转过45度后,再给电机B相绕组3通电,如此电机A相绕组2和电机B相绕组3连续交替通电,球形转子1每转一周电机A相绕组2和电机B相绕组3连续交替通电各4次。303是逆时针电机A相信号波形,304是逆时针电机B相信号波形,303和304均为高电平通电,低电平不通电。
如图4所示,当电机A相绕组2通电时,根据超导体迈斯纳效应,电机A相绕组2产生的磁场在球形转子1内孔窗口左侧壁9和球形转子内孔窗口右侧壁10上产生电磁力,当在球形转子内孔窗口左侧壁9上受到的电磁力大于在球形转子内孔窗口右侧壁10上受到的电磁力时,球形转子1便会在顺时针方向上受到一个转动力矩推动转子1顺时针方向旋转。当在球形转子内孔窗口左侧壁9上受到的电磁力小于在球形转子内孔窗口右侧壁10上受到的电磁力时,球形转子1便会在逆时针方向上受到一个转动力矩推动球形转子1逆时针方向旋转。同理,当电机B相绕组3通电时,根据超导体迈斯纳效应,电机B相绕组3产生的磁场在球形转子内孔窗口左侧壁9和球形转子内孔窗口右侧壁10上产生电磁力,当在球形转子内孔窗口左侧壁9上受到的电磁力大于在球形转子内孔窗口右侧壁10上受到的电磁力时,球形转子1便会在顺时针方向上受到一个转动力矩推动球形转子1顺时针方向旋转。当在球形转子内孔窗口左侧壁9上受到的电磁力小于在转子内孔窗口右侧壁10上受到的电磁力时,转子1便会在逆时针方向上受到一个转动力矩推动转子1逆时针方向旋转。
低温超导球转子驱动装置及其驱动方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0