





专利摘要
本实用新型涉及一种光学系统以及包括光学系统的取像模组及电子设备。所述光学系统由物侧至像侧依次设有第一变形镜组、成像组以及第二变形镜组,所述第一变形镜组及所述第二变形镜组均包括至少一片变形镜片,且具有正负相反的屈折力,所述第一变形镜组及所述第二变形镜组使所述光学系统于第一方向及第二方向的图像放大率不同,所述成像组包括至少一片具有屈折力的透镜。上述光学系统,通过设置变形镜片对图像进行变形,使图像于第一方向及第二方向的图像放大率不同,以扩大光学系统于图像放大率较小的方向上的最大视场角,进而提高光学系统的取像效率。
权利要求
1.一种光学系统,其特征在于,由物侧至像侧方向依次设有:
第一变形镜组,包括至少一片变形镜片;
成像组,包括至少一片具有屈折力的透镜;以及
第二变形镜组,包括至少一片变形镜片;
其中,所述第一变形镜组及所述第二变形镜组具有正负相反的屈折力,且所述第一变形镜组及所述第二变形镜组使所述光学系统于第一方向及第二方向上的图像放大率不同,所述第一方向及所述第二方向为所述光学系统的成像面上两个互异的方向。
2.根据权利要求1所述的光学系统,其特征在于,所述第一变形镜组包括第一变形镜片,所述第二变形镜组包括第二变形镜片,所述第一变形镜片及所述第二变形镜片具有正负相反的屈折力。
3.根据权利要求2所述的光学系统,其特征在于,所述变形镜片的物侧面于所述第一方向上的截面的曲率与所述变形镜片的物侧面于所述第二方向上的截面的曲率不同,所述变形镜片的像侧面于所述第二方向的截面的曲率与所述变形镜片的像侧面于所述第二方向上的截面的曲率不同。
4.根据权利要求3所述的光学系统,其特征在于,所述第一方向为水平方向,所述第二方向为竖直方向,且所述变形镜片的物侧面于所述第一方向上的截面的曲率小于所述变形镜片的物侧面于所述第二方向上的截面的曲率,所述变形镜片的像侧面于所述第一方向上的截面的曲率小于所述变形镜片的物侧面于所述第二方向上的截面的曲率。
5.根据权利要求1所述的光学系统,其特征在于,所述第一变形镜组包括第一变形镜片和第三变形镜片,所述第二变形镜组包括第二变形镜片和第四变形镜片,所述第一变形镜片及所述第三变形镜片的组合焦距与所述第二变形镜片及所述第四变形镜片的组合焦距的正负相反。
6.根据权利要求5所述的光学系统,其特征在于,所述第一变形镜片与所述第三变形镜片的屈折力正负相反;和/或
所述第二变形镜片与所述第四变形镜片的屈折力正负相反。
7.根据权利要求1-6任一项所述的光学系统,其特征在于,满足以下关系式:
(H Object Height/V Object Height)>(HImage Height/VImage Height);
其中,H Object Height为所述光学系统于水平方向上的物高,V Object Height为所述光学系统于竖直方向上的物高,H Image Height为所述光学系统于水平方向上的像高,VImage Height为所述光学系统于竖直方向上的像高。
8.一种取像模组,其特征在于,包括感光元件以及权利要求1-7任一项所述的光学系统,所述感光元件设置于所述光学系统的像侧,光线经所述光学系统后成像至所述感光元件上。
9.一种电子设备,其特征在于,包括壳体以及权利要求8所述的取像模组,所述取像模组安装于所述壳体内。
10.根据权利要求9所述的电子设备,所述电子设备为双目立体视觉成像设备,用于对待测物体进行立体成像,其特征在于,所述取像模组设置有两组,两组所述取像模组从不同方向对所述待测物体进行取像。
说明书
技术领域
本实用新型涉及光学成像技术领域,特别是涉及一种光学系统、取像模组及电子设备。
背景技术
目前,主流的双镜头单图像传感器立体成像技术主要有两种,第一种是搭配两组独立的光学镜头,通过分别收集两组光学镜头所成的图像,并对两个图像进行匹配,以最终获得立体图像。第二种是将两组独立的光学模组所成图像共同经一个成像组,成像组对两组光学模组所成图像进行二次成像以形成一个立体图像。但是,目前的立体成像技术中,光学系统搭配的感光元件在水平方向上的尺寸通常较小,导致水平方向视场角较小,当需要对水平方向较大视场角范围内的物体进行取像时,通常需要经过多次取像,极大降低光学系统的取像效率。
实用新型内容
基于此,有必要针对目前的光学系统水平方向视场角较小导致取像效率降低的问题,提供一种光学系统、取像模组及电子设备。
一种光学系统,由物侧至像侧方向依次设有:
第一变形镜组,包括至少一片变形镜片;
成像组,包括至少一片具有屈折力的透镜;以及
第二变形镜组,包括至少一片变形镜片;
其中,所述第一变形镜组及所述第二变形镜组具有正负相反的屈折力,且所述第一变形镜组及所述第二变形镜组使所述光学系统于第一方向及第二方向上的图像放大率不同,所述第一方向及所述第二方向为所述光学系统的成像面上两个互异的方向。
在其中一个实施例中,所述第一变形镜组包括第一变形镜片,所述第二变形镜组包括第二变形镜片,所述第一变形镜片及所述第二变形镜片具有正负相反的屈折力。
在其中一个实施例中,所述变形镜片的物侧面于所述第一方向上的截面的曲率与所述变形镜片的物侧面于所述第二方向上的截面的曲率不同,所述变形镜片的像侧面于所述第二方向的截面的曲率与所述变形镜片的像侧面于所述第二方向上的截面的曲率不同。
在其中一个实施例中,所述第一方向为水平方向,所述第二方向为竖直方向,且所述变形镜片的物侧面于所述第一方向上的截面的曲率小于所述变形镜片的物侧面于所述第二方向上的截面的曲率,所述变形镜片的像侧面于所述第一方向上的截面的曲率小于所述变形镜片的物侧面于所述第二方向上的截面的曲率。
在其中一个实施例中,所述第一变形镜组包括第一变形镜片和第三变形镜片,所述第二变形镜组包括第二变形镜片和第四变形镜片,所述第一变形镜片及所述第三变形镜片的组合焦距与所述第二变形镜片及所述第四变形镜片的组合焦距的正负相反。
在其中一个实施例中,所述第一变形镜片与所述第三变形镜片的屈折力正负相反;和/或
所述第二变形镜片与所述第四变形镜片的屈折力正负相反。
在其中一个实施例中,所述光学系统满足以下关系式:
(H Object Height/V Object Height)>(H Image Height/V Image Height);
其中,H Object Height为所述光学系统于水平方向上的物高,V Object Height为所述光学系统于竖直方向上的物高,H Image Height为所述光学系统于水平方向上的像高,V Image Height为所述光学系统于竖直方向上的像高。
一种取像模组,包括感光元件以及上述任一实施例所述的光学系统,所述感光元件设置于所述光学系统的像侧,光线经所述光学系统后成像至所述感光元件上。
一种电子设备,包括壳体以及上述的取像模组,所述取像模组安装于所述壳体内。
在其中一个实施例中,所述电子设备为双目立体视觉成像设备,用于对待测物体进行立体成像,其特征在于,所述取像模组设置有两组,两组所述取像模组从不同方向对所述待测物体进行取像。
上述光学系统,当通过设置第一变形镜组以及第二变形镜组,使所述光学系统于第一方向及第二方向的图像放大率不同,即使所述光学系统其中一个方向的图像放大率较小。由此,当匹配感光元件时,使所述光学系统中图像放大率较小的方向与感光元件中尺寸较短的方向相对,通过调整经光学系统后于感光元件尺寸较短的方向上的图像放大率,能够使感光元件上所成图像于尺寸较短的方向上能够携带的信息量较大,进而达到扩大所述光学系统于图像放大率较小的方向上的最大视场角。因此,当需要光学元件对图像放大率较小的方向进行较大视场角范围的取像时,无需进行多次取像,以提高光学系统的取像效率。另外,所述第一变形镜组及所述第二变形镜组具有屈折力,能够配合成像组对进入光学系统的光线进行调节,即第一变形镜组与第二变形镜组在起到图像变形功能的同时,也能够作为光学系统中起屈折光线的透镜元件,以达到降低光学系统的系统总长的效果。进一步地,变形镜片在进行图像变形的同时,容易产生非对称像差,影响成像质量。为避免变形镜片对成像质量的影响,通过使所述第一变形镜组及所述第二变形镜组具有正负相反的屈折力,所述第一变形镜组及所述第二变形镜组能够对彼此产生的非对称像差起到互相补偿的作用,达到校正变形镜片产生的非对称像差的效果。
附图说明
图1为本申请一种实施例中光学系统于第一方向上的截面示意图;
图2为图1所示的光学系统于第二方向上的截面示意图;
图3为本申请另一种实施例中光学系统于第一方向上的截面示意图;
图4为图3所示的光学系统于第二方向上的截面示意图;
图5为本申请第一实施例中光学系统于第一方向上的截面示意图;
图6为本申请第一实施例中光学系统于第二方向上的截面示意图;
图7为本申请第二实施例中光学系统于第一方向上的截面示意图;
图8为本申请第二实施例中光学系统于第二方向上的截面示意图;
图9为本申请第三实施例中光学系统于第一方向上的截面示意图;
图10为本申请第三实施例中光学系统于第二方向上的截面示意图;
图11为本申请一种实施例中取像模组的示意图;
图12为本申请一种实施例中电子设备的示意图。
其中,100、光学系统;101、第一变形镜组;102、第二变形镜组;L1、第一变形镜片;L2、第二变形镜片;L3、第三变形镜片;L4、第四变形镜片;110、成像组;STO、光阑;120、滤光片;130、保护盖;200、取像模组;210、感光元件;300、电子设备;310、壳体;320、补光灯。
具体实施方式
为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳实施方式。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本实用新型的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
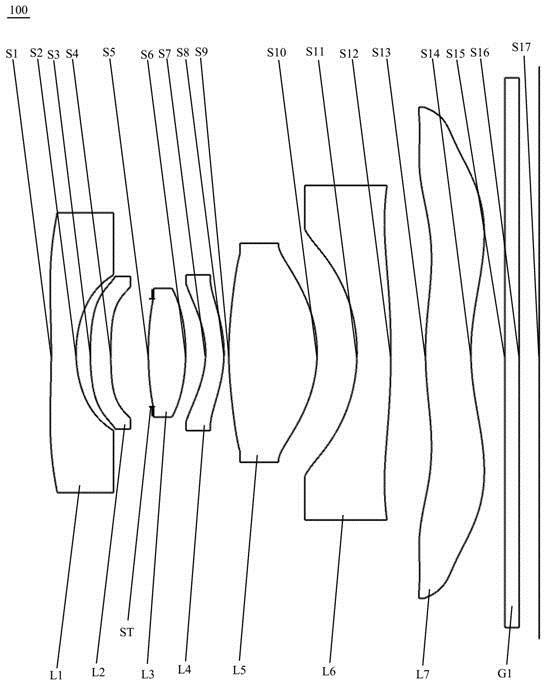
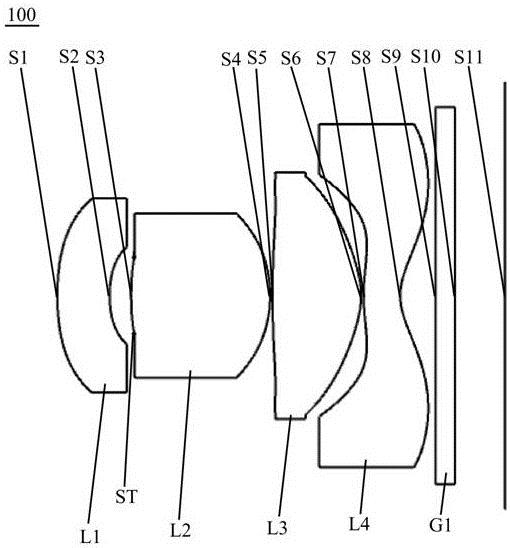
请参见图1和图2,本申请一些实施例中提供的一种具有图像变形功能的光学系统100,由物侧至像侧依次包括具有屈折力的第一变形镜组101,具有屈折力的成像组110以及具有屈折力的第二变形镜组102。其中,第一变形镜组101包括第一变形镜片L1,第一变形镜片L1包括物侧面S1和像侧面S2,第二变形镜组102包括第二变形镜片L2,第二变形镜片L2包括物侧面S3和像侧面S4。且第一变形镜片L1的物侧面S1于第一方向及第二方向上的截面的曲率不同,第一变形镜片L1的像侧面S2于第一方向及第二方向上的截面的曲率不同,以使第一变形镜片L1于第一方向及第二方向上的图像放大率不同,即使第一变形镜组101具备图像变形功能。同理,第二变形镜片L2的物侧面S3于第一方向及第二方向上的截面的曲率不同,第二变形镜片L2的像侧面S4于第一方向及第二方向上的截面的曲率不同,使第二变形镜组102也具备图像变形功能。而第一变形镜组101与第二变形镜组102的配合,使光学系统100也具备图像变形功能。
需要说明的是,在本申请中,当描述某一成像元件具备图像变形功能时,可理解为该成像元件于互异的两个方向上的图像放大率不同,即光线经该成像元件的调节后所成的图像,在该互异的两个方向上尺寸不同,又即所成图像在该互异的两个方向上的尺寸之比与未经变形的图像在该互异的两个方向上的尺寸之比不同。
另外,在一些实施例中,成像组110包括至少一片具有屈折力的透镜,用于对光线进行调节。而光学系统100还包括位于第二变形镜组102像侧的成像面Sim,光线从光学系统100的物侧进入光学系统100中,经第一变形镜组101、成像组110以及第二变形镜组102的调节后,于成像面Sim成像。可以理解的是,成像组110具有的透镜数及透镜的屈折力正负不限,具体可根据光学系统100的功能进行选择,并且,成像组110中的各透镜可相互胶合或相互独立,例如,在图1所示的实施例中,光学系统100包括五片具有屈折力的透镜,且其中第四片透镜及第五片透镜相胶合。当然,在另一些实施例中,成像组110还可包括三片、四片、六片或七片具有屈折力的透镜。只要光线经第一变形镜组101、成像组110以及第二变形镜组102的调节后,能够于成像面Sim形成清晰的图像即可。进一步地,在一些实施例中,成像组110的各透镜的物侧面及像侧面均为球面。
上述光学系统100,通过设置第一变形镜组101及第二变形镜组102,使光学系统100具备图像变形功能,即使光学系统100于第一方向及第二方向上的图像放大率不同。此时,光学系统100于第一方向及第二方向中的其中一个方向上的图像放大率较小。例如,在一些实施例中,光学系统100于第一方向上的图像放大率小于光学系统100于第二方向上的图像放大率。当第一方向上的视场角大小不变时,经变形后于成像面Sim上所成的图像于第一方向上的尺寸较小。即可理解为光学系统100于成像面Sim上所成图像在第一方向上的尺寸不变时,具有变形功能的光学系统100在第一方向上的视场角较大。由此,当光学系统100匹配具有一定长宽比的感光芯片时,即光学系统100所匹配的感光芯片于某一方向的尺寸较短时,使该尺寸较短的方向与第一方向相对,即通过调整经光学系统100后于感光元件尺寸较短的第一方向上的图像放大率,使感光元件上所成图像于第一方向上能够携带的信息量较大,进而达到扩大光学系统100于第一方向上的最大视场角。可以理解的是,此时,光学系统100在感光元件尺寸较短的方向上也能够具有较大的视场角,即达到光学系统100于第一方向及第二方向上的视场角不受感光元件的长宽比限制的效果。
需要说明的是,在本申请中的各实施例中,第一方向均指水平方向,而第二方向指竖直方向。当然,水平方向及竖直方向仅为第一方向和第二方向的其中一些示例,根据应用场景的不同,第一方向和第二方向还应当有其他的设置,例如,在另一些实施例中,第一方向为竖直方向,第二方向为水平方向。而在又一些实施例中,第一方向与第二方向还可为成像面Sim上任意互异的两个方向,且第一方向与第二方向可互相垂直或互相倾斜。
可以理解的是,当光学系统100于第一方向上的图像放大率小于光学系统100于第二方向上的图像放大率时,光学系统100能够满足关系式:(H Object Height/V ObjectHeight)>(H Image Height/V Image Height);其中,H Object Height为光学系统100于水平方向上的物高,V Object Height为光学系统100于竖直方向上的物高,H ImageHeight为光学系统100于水平方向上的像高,V Image Height为光学系统100于竖直方向上的像高。
特殊地,由于光学系统100的图像变形功能,在一些实施例中,光学系统100于水平方向上的物高H Object Height等于光学系统100于竖直方向上的物高V Object Height,即H Object Height/V Object Height=1。此时,相应地,光学系统100于第一方向上的最大视场角HFOV也等于光学系统100于第二方向上的最大视场角VFOV。可以理解的是,传统的光学系统,由于受到感光元件宽高比的限制,如当感光元件与第一方向上的尺寸较短时,会导致光学系统于第一方向上的视场角小于光学系统于第二方向上的视场角。此时,若对于第一方向及第二方向上的尺寸相当的物体成像时,不容易获取物体的完整图像信息。若要匹配物体于第一方向上的尺寸,则所成图像于第二方向上的尺寸较短,使感光元件的感光面利用率低;若要匹配物体于第二方向上的尺寸,则难以获取物体于第一方向上的完整图像信息。而上述光学系统100,在对图像进行变形之后,不受感光元件宽高比的限制,能够使光学系统100于第一方向及第二方向上的视场角相等。如此,当对于第一方向及第二方向上的尺寸相当的物体成像时,能够更容易匹配物体于两个方向的尺寸,进而更容易地获取物体的完整图像信息。
另外,可以理解的是,第一变形镜组101及第二变形镜组102在进行图像变形的过程中,容易产生非对称像差,例如球差、慧差与色差等,进而影响光学系统100的成像质量。为避免第一变形镜组101及第二变形镜组102对成像质量的影响,在一些实施例中,使第一变形镜组101及第二变形镜组102具有正负相反的屈折力。例如,在图1和图2所示的实施例中,第一变形镜片L1具有正屈折力,而第二变形镜片L2具有负屈折力。而在另一些实施例中,第一变形镜片L1也可具有负屈折力,而第二变形镜片L2具有正屈折力。由此,第一变形镜组101及第二变形镜组102能够对彼此产生的非对称像差起到互相补偿的作用,达到校正光学系统100的非对称像差的效果。
更进一步地,可以理解的是,第一变形镜组101及第二变形镜组102均具有屈折力,即第一变形镜组101与第二变形镜组102能够配合成像组110,参与光学系统100对光线的调节作用,由此减少成像组110中的透镜数量,以达到降低光学系统100的系统总长的效果。并且,在一些实施例中,能够通过第一变形镜组101及第二变形镜组102取代传统光学系统中的非变形透镜,以同时起到图像变形以及调节光线的作用,无需再额外配置变形镜片,进而达到降低光学系统100的系统总长的效果。
另外,在一些实施例中,第一变形镜片L1于第一方向上的截面的曲率与第一变形镜片L1及第二变形镜片L2的选择不限,只要能够起到图像变形的作用即可。具体地,参考图1和图2所示,在一些实施例中,第一变形镜片L1及第二变形镜片L2的物侧面于第一方向上的截面均为平面,而第一变形镜片L1及第二变形镜片L2的物侧面与像侧面于第二方向上的截面均为曲面,此时,第一变形镜片L1及第二变形镜片L2均为柱状透镜。可以理解的是,此时,由于第一变形镜片L1及第二变形镜片L2的物侧面及像侧面于第一方向上及第二方向上的截面的曲率不同,即使第一变形镜片L1与第二变形镜片L2于第一方向及第二方向上的图像放大率不同,进而使光学系统100于第一方向及第二方向上的图像放大率不同,以达到图像变形的功能。
并且,在图1和图2所示的实施例中,第一变形镜片L1及第二变形镜片L2的物侧面于第一方向上的截面的曲率均分别小于第一变形镜片L1及第二变形镜片L2的物侧面于第二方向上的截面的曲率,第一变形镜片L1及第二变形镜片L2的像侧面于第一方向上的截面的曲率均分别小于第一变形镜片L1及第二变形镜片L2的像侧面于第二方向上的截面的曲率,此时,光学系统100于第一方向上的图像放大率大于光学系统100于第二方向上的图像放大率。而在另一些实施例中,第一变形镜片L1及第二变形镜片L2的物侧面于第一方向上的截面均为曲面,第一变形镜片L1及第二变形镜片L2的物侧面与像侧面于第二方向上的截面均为平面。即第一变形镜片L1及第二变形镜片L2的物侧面于第一方向上的截面的曲率均分别大于第一变形镜片L1及第二变形镜片L2的物侧面于第二方向上的截面的曲率,第一变形镜片L1及第二变形镜片L2的像侧面于第一方向上的截面的曲率均分别大于第一变形镜片L1及第二变形镜片L2的像侧面于第二方向上的截面的曲率,此时,光学系统100于第一方向上的图像放大率小于光学系统100于第二方向上的图像放大率。
需要注意的是,在本申请中,平面可理解为曲率无限小的曲面,即平面的曲率小于曲面的曲率。
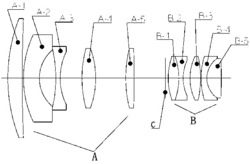
而参考图3和图4所示,在一些实施例中,第一变形镜片L1及第二变形镜片L2的物侧面及像侧面于第一方向上的截面均为曲面,且第一变形镜片L1与第二变形镜片L2的物侧面及像侧面于第二方向上的截面均为曲面,此时,第一变形镜片L1及第二变形镜片L2均为双锥面透镜。可以理解的是,此时光学系统100于第一方向及第二方向的放大率的大小关系不限,具体由第一变形镜片L1及第二变形镜片L2的物侧面及像侧面于第一方向及第二方向上的截面的曲率大小关系决定。
并且,第一变形镜片L1与第二变形镜片L2的面型也不限,在满足屈折力正负的前提下,根据实际应用场景中屈折力大小的要求,以及对像差的校正需求,第一变形镜片L1的面型能够有不同的选择。例如,参考图1和图3所示,当第一变形镜片L1具有正屈折力时,在一些实施例中,第一变形镜片L1的物侧面S1及像侧面S2均为凸面。而在另一些实施例中,第一变形镜片L1的物侧面S1为凸面,像侧面S2为凹面。当然,第一变形镜片L1的物侧面S1也可为平面,而像侧面S2为凸面。当第一变形镜片L1具有负屈折力时,在一些实施例中,第一变形镜片L1的物侧面S1及像侧面S2均为凹面。而在另一些实施例中,第一变形镜片L1的物侧面S1为凹面,像侧面S2为凸面。当然,第一变形镜片L1的物侧面S1为凹面,而像侧面S2也可为平面。同理,第二变形镜片L2的物侧面S3及像侧面S4也可为凸面、凹面或平面的任意组合,只要能够满足屈折力正负的条件即可,在此不一一赘述。
更进一步地,需要说明的是,在本申请中,第一变形镜组101及第二变形镜组102内并不一定仅设置有一片变形镜片,在一些实施例中,第一变形镜组101及第二变形镜组102内还可设置有更多数量的变形镜片,例如两片、三片、四片或五片等。例如,当光学系统100设置有四片变形镜片时,其中两片变形镜片设置于成像组110的物侧,构成第一变形镜组101,而另外两片设置于成像组110的像侧,构成第二变形镜组102;或者,其中一片变形镜片设置于成像组110的物侧,而另外三片设置于成像组110的像侧,构成第二变形镜组102。并且,在一些实施例中,相邻的两片变形镜片的屈折力的正负相反,由此,相邻的两片变形镜片能够对彼此产生的非对称像差进行补偿。
并且,可以理解的是,在光学系统100中,并不一定只有变形镜片以及成像组110具备屈折力,在一些实施例中,第一变形镜组101的物侧,或第二变形镜组102的像侧,也设置有一片或多片具有屈折力透镜,与变形镜片及成像组110进行配合,共同对进入光学系统100的光线起调节作用。另外,在一些实施例中,光学系统100还包括光阑STO,以控制光学系统100的入光量,具体地,光阑STO的设置位置不限,可设置于任一变形镜片及成像组110之间,或设置于成像组110中任意两透镜之间。在图1和图2所示的实施例中,光阑STO设置于成像组110中第二片透镜及第三片透镜之间。
当然,在第一变形镜组101及第二变形镜组102中,除变形镜片外,也可设置有不具备变形功能的普通透镜,与变形镜片共同为第一变形镜组101或第二变形镜组102提供屈折力。
另外,参考图1和图2所示,在一些实施例中,光学系统100还包括设置于第二变形镜组102及成像面Sim之间的滤光片120以及设置于滤光片120及成像面Sim之间的保护盖130。具体地,一些实施例中,滤光片120可以为红外截止滤光片,用于滤除红外光,防止红外光到达成像面Sim而影响可见光的正常成像。而保护盖130可以为一不具有屈折力的玻璃平板,当光学系统100于感光元件相匹配时,保护盖130设置于感光元件的像侧,能够对感光元件起到保护作用。
以下列举出图1和图2所示的实施例中光学系统100的部分参数信息,以下的参数信息仅为其中一种光学系统100参数信息的示例,在另一些实施例中,根据实际应用场景的不同,光学系统100还能够有其他参数设置,只要能够实现光学系统100的图像变形功能即可。具体地,在图1和图2所示的光学系统100中,第一变形镜片L1的最大有效孔径为2.8mm;系统的光圈数为3.8;系统于竖直方向上的最大视场角VFOV=90.6°,于水平方向的最大视场角HFOV=45.3°,于对角线方向的最大视场角DFOV=110°;系统所匹配的感光元件210于竖直方向的尺寸的一半为0.73mm,于水平方向的尺寸的一半为0.456mm,于对角线方向的尺寸的一半为1mm;系统于成像面Sim上85%像高处的亮度是成像面Sim中心处的亮度的58%,系统于成像面Sim上50%像高处的亮度是成像面Sim中心处的亮度的50%;系统的成像面Sim上入射主光线与光轴所成的最大角度为31°;系统的系统总长为7mm;系统的后焦距为1.6mm;系统于50lp/mm空间频率处的MTF值为60%,于100lp/mm空间频率处的MTF值为35%,于150lp/mm空间频率处的MTF值为15%。
根据上述各实施例的描述,以下提出更为具体的实施例及附图予以详细说明,且在以下的三个实施例中,第一方向均为水平方向,第二方向均为竖直方向。
第一实施例
请参见图5和图6,第一变形镜片L1具有正屈折力,第二变形镜片L2具有负屈折力。第一变形镜片L1的物侧面S1及像侧面S2均为凸面;第二变形镜片L2的物侧面S3为凸面,像侧面S4为凹面。且第一变形镜片L1及第二变形镜片L2的物侧面及像侧面于第一方向上的截面均为曲面,于第二方向上的截面均为平面,即第一变形镜片L1及第二变形镜片L2均为柱状透镜。成像组110包括六片具有屈折力的透镜,光阑STO设置于成像组110中第三片透镜及第四片透镜之间。
并且,光学系统100的图像变形数据于表1中给出,其中,X表示第一方向,Y表示第二方向;“X FOV 90.6°”以及“Y FOV 90.6°”分别表示光学系统100于水平方向上的最大视场角为90.6°以及光学系统100于竖直方向的最大视场角为90.6°;“设计像高”一栏表示经图像变形后,光学系统100于成像面Sim上所成的图像于水平方向或竖直方向的像高;“第一变形镜片L1改用球面透镜时的系统像高”一栏表示当第一变形镜片L1用球面透镜替代时,即当第一变形镜片L1不再具备图像变形功能时,又即当光学系统100中仅第二变形镜片L2具有图像变形功能时,光学系统100于成像面Sim上所成的图像于水平方向或竖直方向的像高;同理,“第二变形镜片L2改用球面透镜时的系统像高”一栏表示光学系统100中仅第一变形镜片L1具有图像变形功能时,光学系统100于成像面Sim上所成的图像于水平方向或竖直方向的像高,其他实施例也相同。
并且,可以理解的是,在表1中,X1:Y1可视为第二变形镜片L2于第一方向及第二方向上的图像变形比,X2:Y2可视为第一变形镜片L1于第一方向及第二方向上的图像变形比,X3:Y3可视为光学系统100于第一方向及第二方向上的图像变形比。因此,在忽略光学系统100所产生的畸变等像差对成像质量以及图像放大率的影响的情况下,表1中的数据应当满足关系式:
X3/Y3=(X1/Y1)*(X2/Y2)。
而在实际成像过程中,由于光学系统100会产生畸变等像差,影响光学系统100的成像质量以及光学系统100的图像放大率,表1内实际数据与上述关系式存在一定偏差。
表1
由表1可看出,在第一实施例中,光学系统100于第一方向的放大率小于光学系统100于第二方向的放大率,且第一变形镜片L1与第二变形镜片L2的图像变形比接近,第一变形镜片L1及第二变形镜片L2具有相近的图像变形能力。
第二实施例
请参见图7和图8,第一变形镜组101包括第一变形镜片L1,而第二变形镜组102包括第二变形镜片L2以及第四变形镜片L4,第四变形镜片L4设置于第二变形镜片L2的像侧。其中,第一变形镜片L1具有正屈折力,第二变形镜片L2具有负屈折力,第四变形镜片L4具有负屈折力,第四变形镜片L4与第二变形镜片L2组合,能够与第一变形镜片L1配合,对彼此产生的非对称像差进行互相补偿,进一步提升光学系统100的成像质量。此时,第一变形镜片L1、第二变形镜片L2及第四变形镜片L4共同使光学系统100具有图像变形的功能。
并且,第一变形镜片L1的物侧面S1为凸面,像侧面S2为凹面;第二变形镜片L2的物侧面S3及像侧面S4均为凹面;第四变形镜片L4的物侧面S7为凸面,像侧面S8为凹面。第一变形镜片L1、第二变形镜片L2及第四变形镜片L4于第一方向上的截面均为曲面,于第二方向上的截面均为平面。成像组110包括七片具有屈折力的透镜,光阑STO设置于成像组110中第第四片透镜及第五片透镜之间。光学系统100还设置有两片具有屈折力的透镜,其中一片位于第一变形镜片L1的物侧,另一片位于第四变形镜片L4及滤光片120之间。
光学系统100的图像变形数据于表2中给出,其中各项参数的定义可由第一实施例得出,此处不再赘述。
表2
由表2可看出,在第二实施例中,光学系统100于第一方向的放大率小于光学系统100于第二方向的放大率,且第一变形镜片L1的图像变形比略小于第二变形镜片L2及第四变形镜片L4共同的图像变形比,即可理解为第一变形镜组101的图像变形能力略大于第二变形镜组102的图像变形能力。
第三实施例
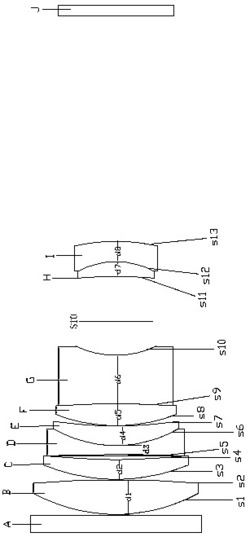
请参见图9和图10,第一变形镜组101包括第一变形镜片L1以及第三变形镜片L3,第二变形镜组102包括第二变形镜片L2以及第四变形镜片L4,第三变形镜片L3设置于第一变形镜片L1与成像组110之间,第四变形镜片L4设置于第二变形镜片L2的像侧。其中,第一变形镜片L1具有正屈折力,第二变形镜片L2具有负屈折力,第三变形镜片L3具有负屈折力,能够与第一变形镜片L1对彼此产生的非对称像差进行互相补偿;第四变形镜片L4具有正屈折力,能够与第二变形镜片L2对彼此产生的非对称像差进行互相补偿。第一变形镜片L1、第二变形镜片L2、第三变形镜片L3以及第四变形镜片L4共同使光学系统100具有图像变形的功能。
可以理解的是,此时,第一变形镜片L1和第三变形镜片L3的组合焦距与第二变形镜片L2和第四变形镜片L4的组合焦距的正负相反,以使第一变形镜组101与第二变形镜组102具有正负相反的屈折力。
并且,第一变形镜片L1的物侧面S1为凸面,像侧面S2为凹面;第二变形镜片L2的物侧面S3为凸面,像侧面S4为凹面;第三变形镜片L3的物侧面S5为凹面,像侧面S6为凸面;第四变形镜片L4的像侧面S7为凸面,物侧面S8为凹面。第一变形镜片L1、第二变形镜片L2以及第四变形镜面于第一方向上的截面均为曲面,于第二方向上的截面均为平面;第三变形镜片L3于第一方向上的截面为平面,于第二方向上的截面为曲面。成像组110包括六片具有屈折力的透镜,光阑STO设置于成像组110中第三片透镜及第四片透镜之间。光学系统100还设置有两片具有屈折力的透镜,其中一片位于第一变形镜片L1的物侧,另一片位于第四变形镜片L4及滤光片120之间。
光学系统100的图像变形数据于表3中给出,其中各项参数的定义可由第一实施例得出,此处不再赘述。
表3
由表3可看出,在第三实施例中,光学系统100于第一方向的放大率小于光学系统100于第二方向的放大率,且第一变形镜片L1与第三变形镜片L3共同的图像变形比远小于第三变形镜片L3及第四变形镜片L4共同的图像变形比,即可理解为第一变形镜片L1与第三变形镜片L3作为一整体的图像变形能力远大于第二变形镜片L2及第四变形镜片L4作为一整体的图像变形能力。因此,在第三实施例中,第一变形镜组101起主要的图像变形功能,而第二变形镜组102起主要的非对称像差的补偿功能。
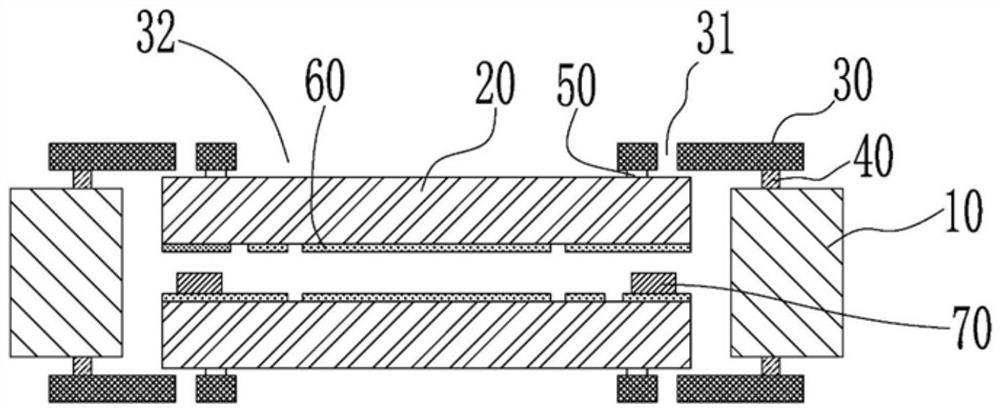
请参见图11,上述光学系统100能够与感光元件210组装成取像模组200,感光元件210具有感光面,光线经光学系统100的调节后于感光元件210的感光面成像,此时,感光元件210的感光面即可视为光学系统100的成像面Sim。具体地,感光元件210可以为电荷耦合元件(CCD)或互补金属氧化物半导体器件(CMOS Sensor)。在取像模组200中采用上述光学系统100,在感光元件210的尺寸不变时,能够扩大光学系统100于图像放大率较小的方向上的最大视场角,以提高光学系统100的取像效率,使光学系统100更容易获取待测物体的完整图像信息。
进一步地,请参见图11和图12,一种电子设备300,包括壳体310以及上述取像模组200,取像模组200安装于壳体310上。具体地,电子设备300可以为但不限于便携电话机、视频电话、智能手机、电子书籍阅读器、行车记录仪等车载摄像设备或智能手表等可穿戴装置。
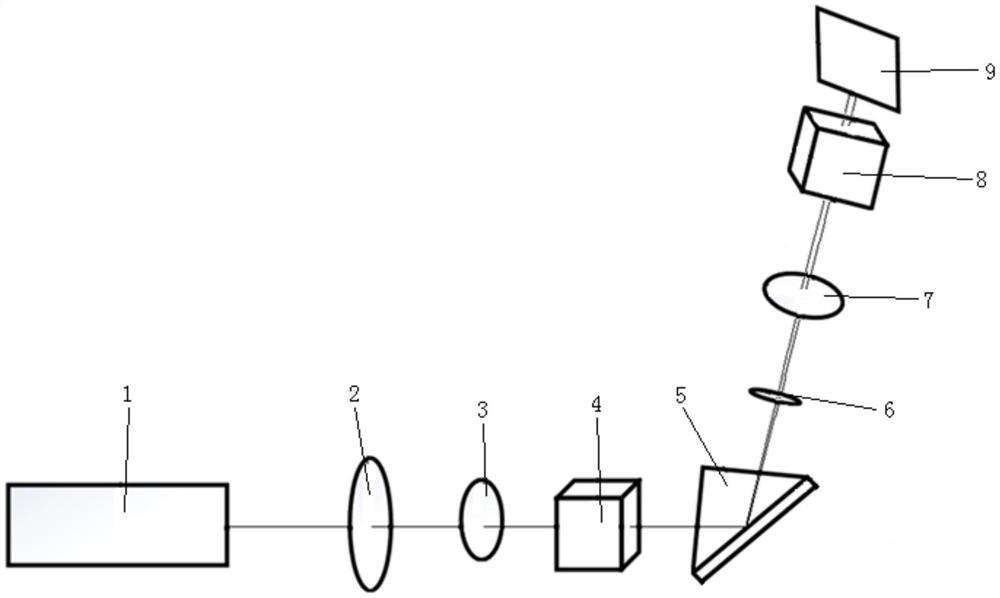
更进一步地,在一些实施例中,电子设备300还可以为立体影像内窥镜、头戴式三维成像仪等具有双目立体视觉成像功能的三维成像设备。此时,电子设备300包括两个取像模组200,当对待测物体取像时,待测物体位于两个取像模组200的像侧,且两个取像模组200的光轴成一定角度,以此实现从两个不同的角度分别对取像模组200取像。并且,电子设备300还应当包括图像处理模组(图未示出),以对两个取像模组200所获取的图像进行处理,通过匹配两个取像模组200所获取的图像,得到待测物体的三维信息。
可以理解的是,在一些实施例中,电子设备300的图像模组还可具有图像还原功能,通过改变取像模组200获取的图像于第一方向及第二方向的比例,将图像还原为未经变形时的状态,以更直观地体现待测物体的图像信息。并且,在一些实施例中,电子设备300还设置有补光灯320,当取像时,补光灯320能够提供环境亮度,避免环境亮度不足影响成像质量。
在电子设备300中采用上述取像模组200,在感光元件210的尺寸不变时,能够扩大光学系统100于图像放大率较小的方向上的最大视场角,以提高光学系统100的取像效率,进而使电子设备300更容易获取待测物体的完整图像信息。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
光学系统、取像模组及电子设备专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0