







专利摘要
一种全自动反无人机的电磁枪,该电磁枪包括:包括:支架,其定义有圆心、环绕该圆心的圆周以及贯穿该圆心的中心轴;至少三个摄像头,这些摄像头均匀分布,并是向外倾斜地设置在该支架的圆周上,这些摄像头的中心视线形成一倒锥;定向天线,设置在该支架的中心轴上;电磁模块,与该定向天线耦合;云台,与该支架的圆心相连,用于带动该支架旋转;以及控制单元,用于根据这些摄像头提供的视频图像,控制该云台对目标进行跟踪并锁定目标,进而控制该电磁模块对目标进行攻击。本实用新型能够大大提高跟踪、瞄准和攻击的自动化程度。
权利要求
1.一种全自动反无人机的电磁枪,其特征在于,包括:支架,其定义有圆心、环绕该圆心的圆周以及贯穿该圆心的中心轴;至少三个摄像头,这些摄像头均匀分布,并是向外倾斜地设置在该支架的圆周上,这些摄像头的中心视线形成一倒锥;定向天线,设置在该支架的中心轴上;电磁模块,与该定向天线耦合;云台,与该支架的圆心相连,用于带动该支架旋转;以及控制单元,用于根据这些摄像头提供的视频图像,控制该云台对目标进行跟踪并锁定目标,进而控制该电磁模块对目标进行攻击。
2.依据权利要求1所述的全自动反无人机的电磁枪,其特征在于,这些摄像头的视场均为矩形,这些摄像头共有的重叠区域对应于该支架的中心轴,当目标进入到重叠区域时,在所有摄像头中均成像,则意味着目标被该定向天线对准。
3.依据权利要求1所述的全自动反无人机的电磁枪,其特征在于,该支架所定义的圆周的半径越大,该摄像头的中心视线与该支架所定义的中心轴的夹角越小。
4.依据权利要求1所述的全自动反无人机的电磁枪,其特征在于,该支架为十字支架,这些摄像头的数目为四个。
5.依据权利要求4所述的全自动反无人机的电磁枪,其特征在于,该电磁枪的射程设定在两百米以内。
6.依据权利要求1所述的全自动反无人机的电磁枪,其特征在于,该摄像头选用带红外功能的高清摄像头。
7.依据权利要求1所述的全自动反无人机的电磁枪,其特征在于,该定向天线选用八木天线。
8.依据权利要求1所述的全自动反无人机的电磁枪,其特征在于,该云台选用全向云台。
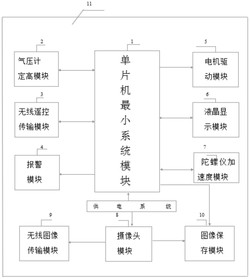
9.依据权利要求1所述的全自动反无人机的电磁枪,其特征在于,该控制单元包括图像分析模块,用于对这些摄像头提供的视频图像进行分析,进而根据分析结果控制该云台和/或该电磁模块;通信模块,用于对外通信;以及电源模块,用于提供工作电源。
说明书
技术领域
本实用新型涉及一种反无人机的装置,尤其涉及一种电磁枪。
背景技术
近年来,无人机市场增长迅猛。随着众多厂家的大规模研发和生产,使得商用无人机普及程度越来越高。然而,国内对无人机,尤其是对“黑飞”无人机的监管还处于空白状态,这些“黑飞”无人机所带来的骚扰与威胁程度随之升高。小至侵犯个人/家庭的隐私、造成伤人损物事件,大至危及国防安全。近期便有航班事故、黑飞高速伤人,可见黑飞无人机隐藏巨大的安全隐患。面对“黑飞”无人机监管的空白,唯有采取相应的的技术手段加以反制,才能保障空中的安全。
目前,常见的反无人机设备有反无人机电磁枪,外形类似步枪,枪身是一个电磁脉冲发射器,枪管是一个发射天线(很多是螺旋状),具体的工作原理就是:操作人员将反无人机枪瞄准无人机以后,发射一束强功率的定向电磁脉冲干扰波,以干扰无人机的电子系统,使其通信导航系统失灵,失去控制,然后降落地面甚至坠毁。现有的这类设备存在着自动化程度低的问题:要由操作人员来进行目标跟踪、瞄准和射击,操作人员需要经过专门的培训,掌握瞄准和射击的技能,还需要时刻保持警戒状态,对操作人员的精力、体力有较高的要求。
实用新型内容
本实用新型所要解决的技术问题在于克服上述现有技术所存在的不足,而提出一种全自动反无人机的电磁枪,能够大大提高跟踪、瞄准和攻击的自动化程度。
本实用新型针对上述技术问题提出一种全自动反无人机的电磁枪,包括:支架,其定义有圆心、环绕该圆心的圆周以及贯穿该圆心的中心轴;至少三个摄像头,这些摄像头均匀分布,并是向外倾斜地设置在该支架的圆周上,这些摄像头的中心视线形成一倒锥;定向天线,设置在该支架的中心轴上;电磁模块,与该定向天线耦合;云台,与该支架的圆心相连,用于带动该支架旋转;以及控制单元,用于根据这些摄像头提供的视频图像,控制该云台对目标进行跟踪并锁定目标,进而控制该电磁模块对目标进行攻击。
在一些实施例中,这些摄像头的视场均为矩形,这些摄像头共有的重叠区域对应于该支架的中心轴,当目标进入到重叠区域时,在所有摄像头中均成像,则意味着目标被该定向天线对准。
在一些实施例中,该支架所定义的圆周的半径越大,该摄像头的中心视线与该支架所定义的中心轴的夹角越小。
在一些实施例中,该支架为十字支架,这些摄像头的数目为四个。
在一些实施例中,该电磁枪的射程设定在两百米以内。
在一些实施例中,该摄像头选用带红外功能的高清摄像头。
在一些实施例中,该定向天线选用八木天线。
在一些实施例中,该云台选用全向云台。
在一些实施例中,该控制单元包括图像分析模块,用于对这些摄像头提供的视频图像进行分析,进而根据分析结果控制该云台和/或该电磁模块;通信模块,用于对外通信;以及电源模块,用于提供工作电源。
与现有技术相比,本实用新型的全自动反无人机的电磁枪,通过巧妙地借助支架,设置若干个在圆周上均匀分布的摄像头、在圆心上的云台以及在中心轴上的定向天线,并通过控制单元将这些摄像头、云台以及与定向天线耦合的电磁模块有机的结合到一起,能够大大提高跟踪、瞄准和攻击的自动化程度。
附图说明
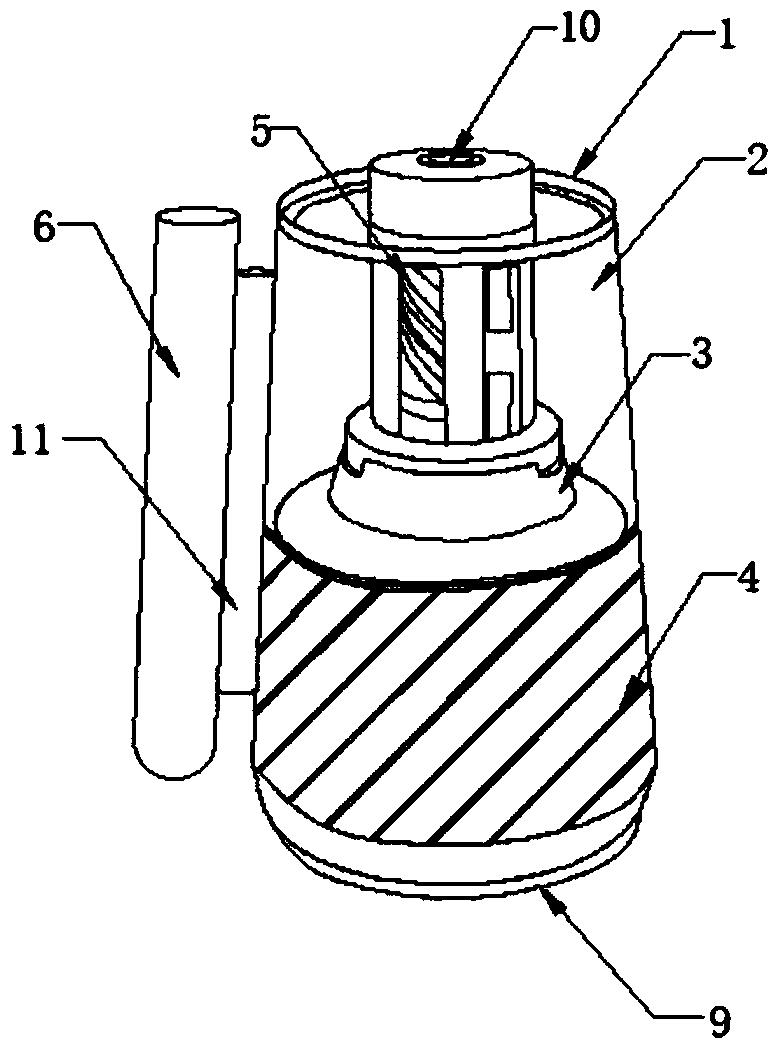
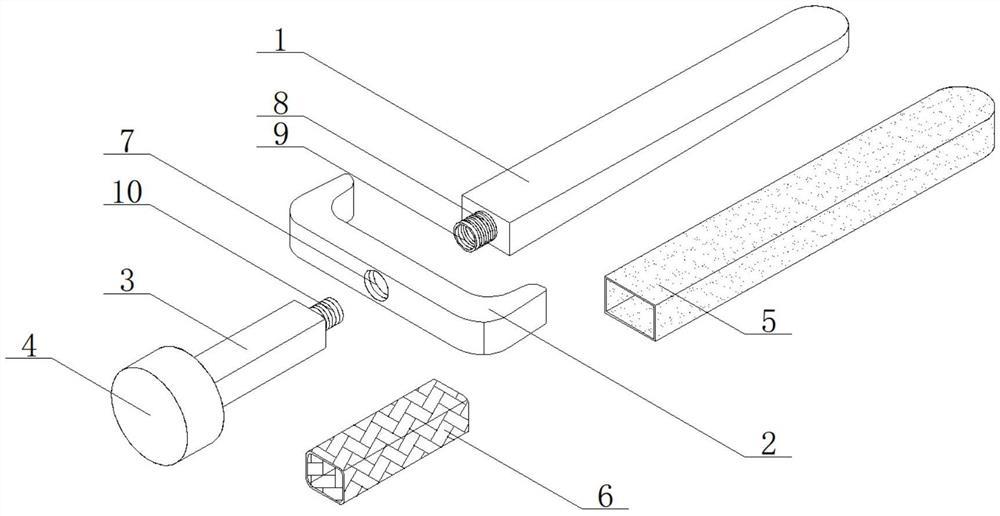
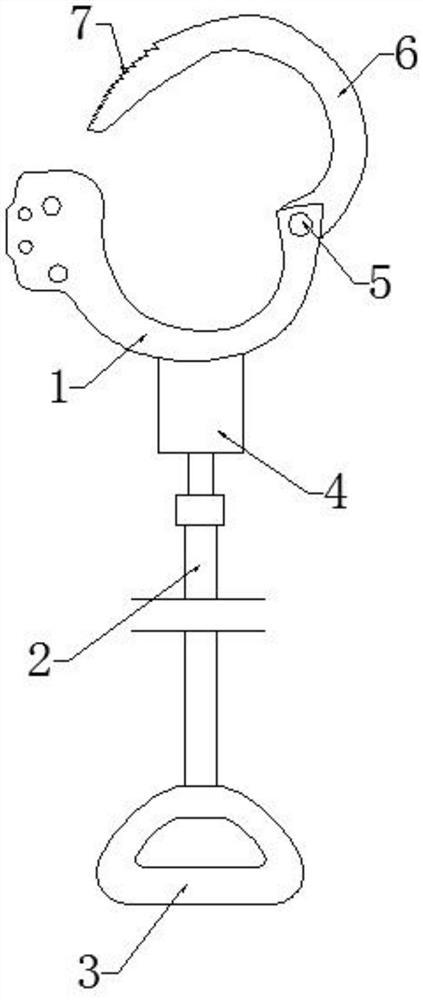
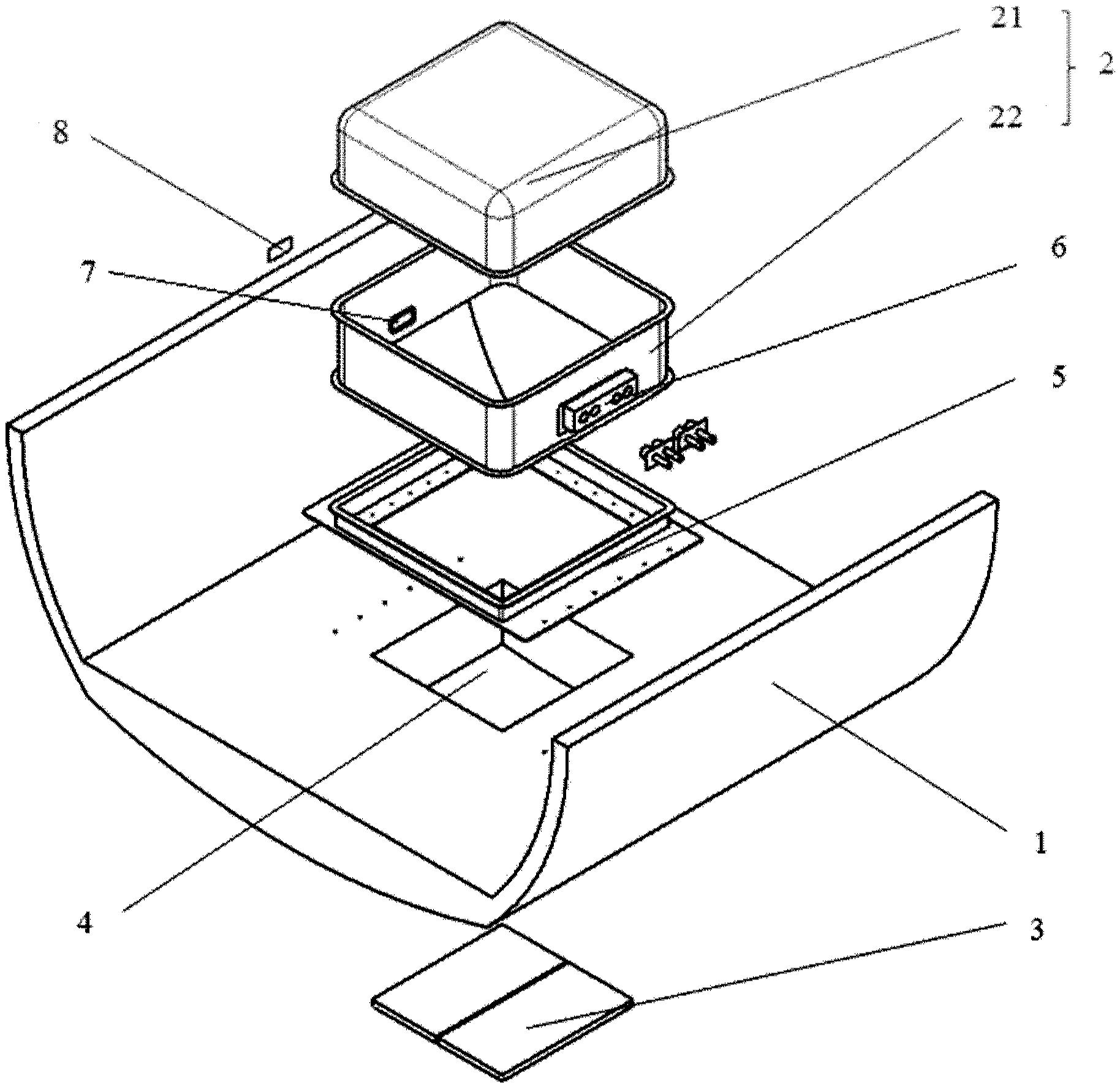
图1是本实用新型的全自动反无人机电磁枪中支架的外观轮廓示意。
图2是本实用新型的全自动反无人机电磁枪的原理性结构示意。
图3是本实用新型的全自动反无人机电磁枪中四个摄像头外倾布置的结构示意。
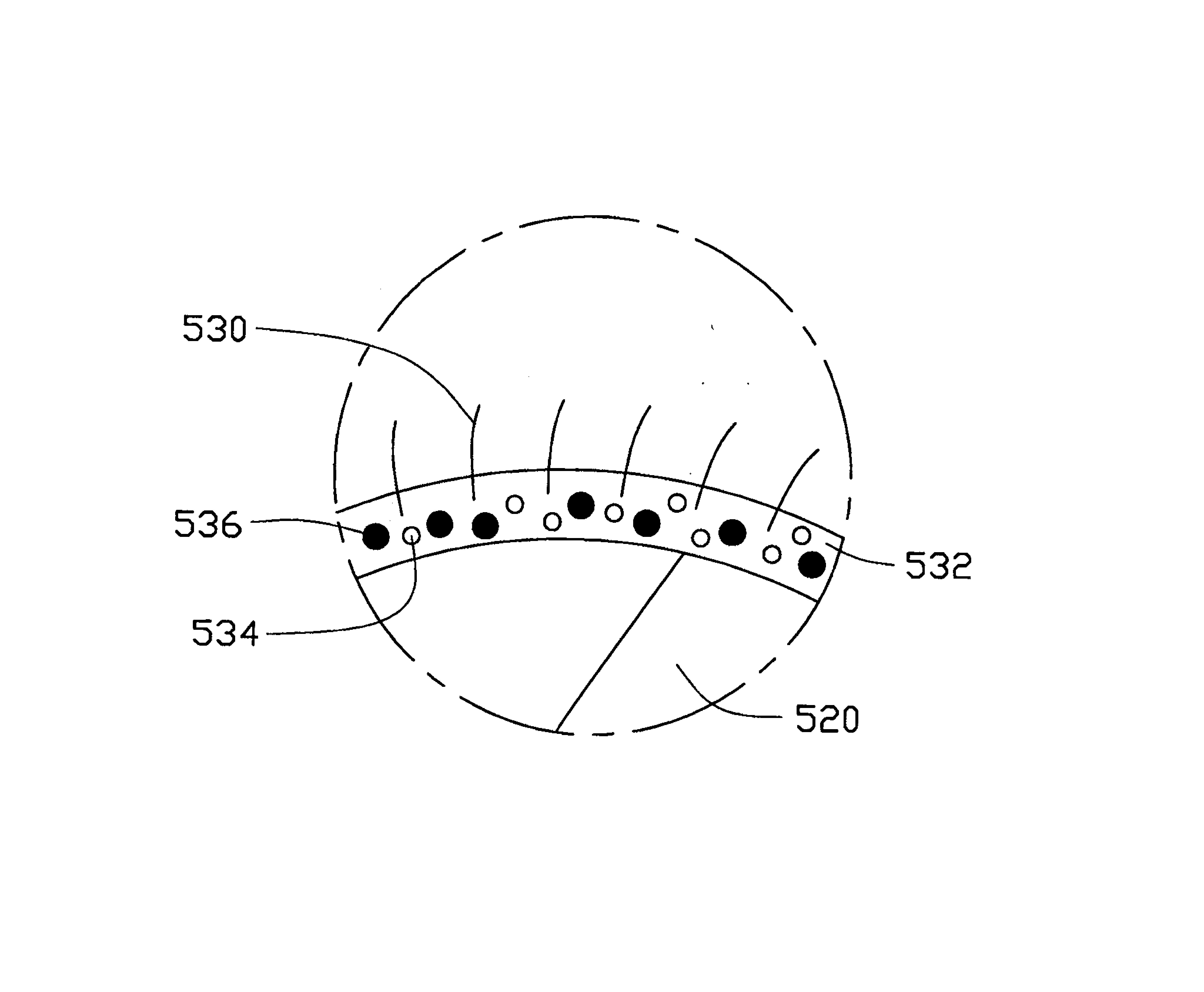
图4是本实用新型的全自动反无人机电磁枪中四个摄像头的监控区域示意。
图5是本实用新型的全自动反无人机电磁枪的工作原理的流程示意。
其中,附图标记说明如下:10 电磁枪 1支架 15 圆心 17 端点 19 中心轴 2 摄像头 29 中心轴线 3 定向天线 4电磁控制模块 5 云台 6 控制单元 7 电磁枪主体 8 夹角 9 锥顶 31、32、33、34 监控区域 310、320、330、340 基本区域 301 第一区域 302 第二区域 303 第三区域 304 第四区域305 第五区域 306 第六区域 307 第七区域 308 第八区域 309 第九区域。
具体实施方式
以下结合本说明书的附图,对本实用新型的较佳实施例予以进一步地详尽阐述。
参见图1、图2和图3,图1是本实用新型的全自动反无人机电磁枪中支架的外观轮廓示意。图2是本实用新型的全自动反无人机电磁枪的原理性结构示意。图3是本实用新型的全自动反无人机电磁枪中四个摄像头外倾布置的结构示意。本实用新型提出一种全自动反无人机电磁枪10,其大致包括:支架1,装设在该支架1上的四个摄像头2、一个定向天线3和一个电磁模块4,与该支架1相配合的一个云台5,以及一个控制单元6。其中,定向天线3和电磁模块4的组合可以统称为电磁枪主体7。
该支架1定义有圆心15、环绕该圆心15的圆周以及贯穿该圆心15的中心轴19。在本实施例中,该支架1呈十字形,具有四个端点17,这四个端点17距离圆心15(也称中心点)的距离相等。该支架1的圆心15搁置在该云台5上。
在每个端点上装设有一个摄像头2。这些摄像头2是向外倾斜地设置在该支架1的圆周上,这些摄像头2的中心视线29形成一倒锥,也即锥顶9是背向天空的。具体而言,该支架1所定义的圆周的半径越大,该摄像头2的中心视线29与该支架1所定义的中心轴19的夹角8越小。
该定向天线3设置在该支架1定义的中心轴19上。也就是说,该定向天线3的中心线与该中心轴19重叠。该电磁模块4与该定向天线3耦合。在本实施例中,该电磁模块4是设置在该定向天线3的下面。
该控制单元6包括:图像分析模块,用于对这些摄像头2提供的视频图像进行分析,进而根据分析结果控制该云台5和/或该电磁模块4;通信模块,用于对外通信;以及电源模块,用于提供工作电源。具体而言,这四个摄像头2通过视频线,该电磁模块4通过控制线,该云台5通过控制线,分别与该控制单元6相连。
在本实施例中,该摄像头2选用带红外功能的高清摄像头。该定向天线3选用八木天线。该电磁模块4能够将设定频率的电磁波,经由该定向天线3发射出去。该云台5选用全向云台,该全向云台内部包括两个电机,分别负责云台在两个垂直坐标方向(例如:上下和左右)上的转动。
参见图4,图4是本实用新型的全自动反无人机电磁枪中四个摄像头的监控区域示意。该电磁枪10的四个摄像头2的视场分别对应于四个矩形的监控区域31、32、33、34。每个监控区域31、32、33、34具有一个专属于自身摄像头2的基本区域310、320、330、340。至少有两个摄像头2的视场重叠的区域包括:第一区域301、第二区域302、第三区域303、第四区域304、第五区域305、第六区域306、第七区域307、第八区域308和第九区域309。
位于上方的摄像头2的视场31由基本区域310、第一区域301、第二区域302、第三区域303、第四区域304、第五区域305、第六区域306组成。
位于下方的摄像头2的视场32由基本区域320、第四区域304、第五区域305、第六区域306、第七区域307、第八区域308、第九区域309组成。
位于左侧的摄像头2的视场33由基本区域330、第一区域301、第二区域302、第四区域304、第五区域305、第七区域307、第八区域308组成。
位于由侧的摄像头2的视场34由基本区域340、第二区域302、第三区域303、第五区域305、第六区域306、第八区域308、第九区域309组成。
可见,第五区域305是四个摄像头2的视场共有的重叠区域,对应于支架1的中心轴19,也就是说,在理论上,中心轴19的延长线是从该第五区域305的中心穿过的。当无人机进入到第五区域305时,意味着无人机被该定向天线3对准。
值得一提的是,在本实施例中,该电磁枪10的射程设定在两百米以内。四个摄像头2的第五区域305的有效距离在50米至300米。在其他实施例中,根据实际应用的需要,可以适当地扩大该电磁枪10的设置射程,例如:三百米。相应地,可以调整四个摄像头2的第五区域305的有效距离在150米至400米。
参见图5,图5是本实用新型的全自动反无人机电磁枪的工作原理的流程示意。该电磁枪10的工作原理,也即采用该电磁枪10实现的全自动反无人机的方法,大致包括:
步骤S501:四个摄像头2对着监视空域进行拍摄,将采集到的视频图像实时发送给控制单元6。
步骤S503:当控制单元6经分析,发现有无人机进行入监视空域后,根据无人机当前位置,指令给云台5,控制云台5转动,对无人机进行跟踪,将无人机在视场中的成像位置往视场重叠区域移动。
步骤S505:当无人机进入预定的被锁定的位置305,即无人机成像于所有摄像头2,则该控制单元6发指令给电磁模块4,由电磁模块4通过定向天线3发射特定频率的电磁波,对无人机进行攻击。
也就是说,结合图2和图3,当发现监控空域300有异常情况,则先由该控制单元6根据飞行物的形状和移动速度,作出判断是否为无人机;如果判断为无人机,则按照无人机在图2和图3中的位置,发控制指令给该云台5,控制该云台5转动,进行跟踪,直至将无人机在图2和图3中的成像位置移动到第五区域305的位置,完成目标锁定;然后,该控制单元6可发出控制指令,指示电磁模块4经由该定向天线3发射电磁波,对无人机进行攻击,以将无人机击落。
与现有技术相比,本实用新型的电磁枪10,通过巧妙地借助支架1,设置若干个在圆周上均匀分布的摄像头2、在圆心15上的云台5以及在中心轴19上的定向天线3,并通过控制单元6将这些摄像头2、云台5以及与定向天线3耦合的电磁模块4有机的结合到一起,能够大大提高跟踪、瞄准和攻击的自动化程度。
值得一提的是,在上述实施例中,是四个摄像头2在圆周上均匀分布;在其他实施例中,在圆周上均匀分布的摄像头2的数目也可以是三个、四个、五个以及大于五个。在上述实施例中,是采用十字形的支架1来承载这四个摄像头2;在其他实施例中,用于承载摄像头2的支架1也可以采用诸如轮盘之类的其他形式,也就是说,支架1的结构形式可以多种多样,只要保证能够将这些摄像头2均匀地分布在同一个圆周上,支架1的圆心15与云台5相连,并且定向天线3设置在这个圆周的中心轴19上。
上述内容仅为本实用新型的较佳实施例,并非用于限制本实用新型的实施方案,本领域普通技术人员根据本实用新型的主要构思和精神,可以十分方便地进行相应的变通或修改,故本实用新型的保护范围应以权利要求书所要求的保护范围为准。
全自动反无人机的电磁枪专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0