

IPC分类号 : F03B13/22,F03B13/18,B63B35/44,F03D9/00,F03D13/25







专利摘要
本发明公开了一种漂浮式风能‑波浪能联合发电装置及其控制方法,属于海洋可再生能源利用技术领域,包括风力发电模块、波浪能发电模块和漂浮式平台,波浪能发电模块通过多组铰链结构安装在漂浮式平台外侧,波浪能发电模块的浮子在波浪作用下通过连接臂带动液压缸往复运动和液压系统运转,从而驱动液压马达和液压发电机发电;液压系统的控制方法:实时检测平台的运动并通过可调式节流阀调节液压系统流量,从而控制液压缸往复运动的阻尼,有效降低联合发电平台的运动响应。本发明在同一个支撑结构上完成,降低了发电的成本,是一种可靠的海上可再生能源发电平台。液压系统的控制方法有助于改善系统运动稳定性。
权利要求
1.一种漂浮式风能-波浪能联合发电装置,包括风力发电模块、波浪能发电模块和漂浮式平台,其特征在于:
所述风力发电模块包括塔筒以及设置于所述塔筒顶端的风力发电机;所述漂浮式平台设置于所述塔筒的底端,漂浮式平台通过锚链与海床连接;
所述波浪能发电模块包括固定在所述漂浮式平台侧面的液压系统、通过连接臂铰接在所述漂浮式平台侧面的浮子,以及铰接在所述漂浮式平台与所述连接臂之间的液压缸;所述浮子在海水的作用下上下起伏,带动所述连接臂上下摆动,同时所述液压缸做往复运动,驱动所述液压系统运转并带动液压马达和液压发电机旋转发电;
所述液压系统包括可调式节流阀和液控单向阀,所述可调式节流阀用于调节液压系统流量,从而控制所述液压缸往复运动的阻尼,并通过所述液压缸与浮筒之间的相互作用力减小漂浮式平台的运动响应;所述液控单向阀用于封闭液压系统油路和锁定液压缸,实现波浪能发电装置的停机;
基于所述漂浮式风能-波浪能联合发电装置实现的液压系统控制方法,包括以下步骤:
步骤1)设定波浪能发电模块的工作波高范围,波高上限为h
步骤2)实时检测波高值h,联合发电装置的摇摆运动的角速度ω
步骤3)判断当前波高值是否在波浪能发电模块工作波高范围以内,若h>h
步骤4)若h≤h
步骤5)计算三组波浪能发电模块角速度ω
步骤6)以联合发电装置摇摆运动方向为正方向,判断ω
步骤7)计算三组波浪能发电模块中液压缸的最优阻尼B
在此限制条件下结合步骤6),通过数值方法确定允许范围内三组液压缸的最优阻尼B
步骤8)根据液压缸的最优阻尼B
步骤9)重复步骤2)~8),直至装置停止工作。
2.根据权利要求1所述的漂浮式风能-波浪能联合发电装置,其特征在于:所述的漂浮式平台包括连接在所述塔筒底部的桁架结构和安装在所述桁架结构上的浮筒,所述的波浪能发电模块安装在所述浮筒外壁上。
3.根据权利要求2所述的漂浮式风能-波浪能联合发电装置,其特征在于:所述的浮筒以塔筒为中心,均匀布置于所述桁架结构的周围。
4.根据权利要求1所述的漂浮式风能-波浪能联合发电装置,其特征在于:所述的液压缸的一端通过第一铰链连接在所述漂浮式平台侧面,另一端通过第二铰链连接在所述连接臂上;所述连接臂的端部通过第三铰链连接在所述漂浮式平台侧面。
5.根据权利要求1所述的漂浮式风能-波浪能联合发电装置,其特征在于:所述的液压缸为双行程液压缸。
6.根据权利要求1所述的漂浮式风能-波浪能联合发电装置,其特征在于:所述的波浪能发电模块还包括用于实时检测波高的波高仪,以及用于检测混合发电平台摇摆的位移和速度的姿态传感器。
说明书
技术领域
本发明涉及海洋可再生能源利用技术领域,具体地说,涉及一种漂浮式风能-波浪能联合发电装置及其控制方法。
背景技术
风力发电是目前最具大规模工业化发展前景的可再生能源,海上风电已经成为国际风电发展的新方向,备受各国关注。随着陆上风电的利用逐渐饱和,海上风电在整个能源架构中的占比逐年上升,发展海上风能对我国的能源结构调整和可持续发展具有重要意义。
相较于陆上,海上具有更加丰富和稳定的风能资源,尤其是深远海区域,因此适用于深水环境的浮式风机技术也越发受到关注。但浮式风机面临高昂的海底电缆建设费用以及海上恶劣的海况,如何降低海上风电的平准化度电成本(LCOE)是浮式风机发展的关键。
海上蕴藏着巨大的波浪能资源,对波浪能的开发是当今的研究热点之一,波浪能利用技术日渐成熟,但是波浪能发电装置转换率较低,单位发电成本较高,限制了其工业化化的应用。
把海上风电开发和波浪能资源利用结合起来,可以有效提高海上风电场的发电能力并通过波浪能装置提高浮式风机的可靠性与安全性。风能-波浪能多能互补利用的方法是解决海洋可再生能源综合利用的有效途径,可以有效缓解沿海城市供电紧张的难题。如公布号为CN109026542A的中国专利文献公开的一种漂浮式风能-波浪能联合发电系统,该联合发电系统以半潜漂浮式平台为基础将风能和波浪能装置相结合,实现了海上可再生能源的开发,但是其波浪能装置采用空气透平的方式来实现发电,其发电效率不高,由于在海上设置这样一个装置需要花费大量成本,而无法达到较高的发电效率,容易造成资源浪费。
发明内容
本发明的目的为提供一种漂浮式风能-波浪能联合发电装置及其控制方法,其发电效率高,充分利用海上可再生能源,降低风能和波浪能的发电成本。
为了实现上述目的,一方面,本发明提供的漂浮式风能-波浪能联合发电装置包括风力发电模块、波浪能发电模块和漂浮式平台,风力发电模块包括塔筒以及设置于塔筒顶端的风力发电机;漂浮式平台设置于塔筒的底端,漂浮式平台通过锚链与海床连接;
波浪能发电模块包括固定在漂浮式平台侧面的液压系统、通过连接臂铰接在漂浮式平台侧面的浮子,以及铰接在漂浮式平台与连接臂之间的液压缸;浮子在海水的作用下上下起伏,带动连接臂上下摆动,同时液压缸做往复运动,驱动液压系统运转并带动液压马达和液压发电机旋转发电;
液压系统包括可调式节流阀和液控单向阀,所述可调式节流阀用于调节液压系统流量,从而控制所述液压缸往复运动的阻尼,并通过所述液压缸与所述浮筒之间的相互作用力减小漂浮式平台的运动响应;所述液控单向阀用于封闭液压系统油路和锁定液压缸,实现波浪能发电装置的停机。
上述技术方案中,以漂浮式平台为基础将风能和波浪能模块相结合,集成为一个联合发电装置,充分利用海上可再生能源,降低风能和波浪能的发电成本,通过漂浮式平台可以扩大使用范围,适用水深更大,应用更加广泛,同时通过控制波浪能发电装置降低平台载荷,提高集成发电系统的可靠性与安全性,有效推动其在工业上的应用。是未来海上风电发展的趋势。
作为优选,漂浮式平台包括连接在塔筒底部的桁架结构和安装在桁架结构上的浮筒,波浪能发电模块安装在浮筒外壁上。基于桁架结构的浮式平台,结构简单、施工便利、安装成本低、适用水深范围广。同时,桁架结构可以有效降低平台载荷,进而提高集成发电系统的可靠性与安全性,有效推动其在工业上的应用。
作为优选,浮筒以塔筒为中心,均匀布置于桁架结构的周围。
作为优选,液压缸的一端通过第一铰链连接在漂浮式平台侧面,另一端通过第二铰链连接在连接臂上;连接臂的端部通过第三铰链连接在漂浮式平台侧面。
作为优选,液压缸为双行程液压缸。可以提高波浪能发电装置的能量捕获效率。
作为优选,波浪能发电模块还包括用于实时检测波高的波高仪,以及用于检测混合发电平台摇摆的位移和速度的姿态传感器。
另一方面,本发明提供的漂浮式风能-波浪能联合发电装置的液压系统控制方法,用于控制上述漂浮式风能-波浪能联合发电装置的液压系统,包括以下步骤:
步骤1)设定波浪能发电模块的工作波高范围,波高上限为hmax;设定波浪能发电模块为三组;
步骤2)实时检测波高值h,联合发电装置的摇摆运动的角速度ωp及其方向,三组波浪能发电模块的角速度ω1,ω2,ω3及其方向;
步骤3)判断当前波高值是否在波浪能发电模块工作波高范围以内,若h>hmax,则锁定液压缸,将波浪能发电模块提离水面锁定并停止工作;
步骤4)若h≤hmax,则根据联合发电装置的摇摆运动方向和三组波浪能发电模块位置计算得到三组波浪能发电模块与联合发电装置摇摆运动所在平面的夹角θ1,θ2,θ3;
步骤5)计算三组波浪能发电模块角速度ω1,ω2,ω3在联合发电装置摇摆运动所在平面内投影的角速度,计算公式为:
步骤6)以联合发电装置摇摆运动方向为正方向,判断ωp-ωi的符号,若ωp-ωi>0,即表示在该平面内波浪能发电模块相对于联合发电装置的相对角速度为负,则需增大该波浪能发电模块的液压系统阻尼;若ωp-ωi<0,即表示在该平面内波浪能发电模块相对于联合发电装置的相对角速度为正,则需减小该波浪能发电模块的液压系统阻尼;
步骤7)计算三组波浪能发电模块中液压缸的最优阻尼B1,B2,B3,求解条件为:
在此限制条件下结合步骤6),通过数值方法确定允许范围内三组液压缸的最优阻尼B1,B2,B3;
步骤8)根据液压缸的最优阻尼B1,B2,B3控制调节式节流阀,使液压缸达到该阻尼值;
步骤9)重复步骤2)~8),直至装置停止工作。
与现有技术相比,本发明的有益效果为:
1)将海上风力发电系统与波浪能发电装置相结合,共享海底电缆、海上平台以及锚链等基础设施,有效提高了系统的整体发电效率,降低了发电成本。
2)波浪能发电装置的控制技术可提高系统的稳定性,降低结构载荷。
3)波浪能发电装置的对称分布有助于提高浮式平台的稳定性,且在恶劣海况下波浪能发电装置可被提起锁定,提高了安全性能。
4)本发明提高了深海海域能源的有效利用率,降低了建设成本和维修费用,充分利用现有的成熟风机技术,促进了漂浮式风机和波浪能装置工业化的应用,是一种可靠的海上可再生能源发电平台。
附图说明
图1是本发明实施例中漂浮式风能-波浪能联合发电装置的结构示意图;
图2是本发明实施例中波浪能发电模块与浮筒的局部连接示意图;
图3是本发明实施例中波浪能发电模块的工作状态示意图;
图4是本发明实施例中波浪能发电模块的停机状态示意图;
图5是本发明实施例中联合发电装置的摇摆运动平面与波浪能发电模块相对夹角计算原理图;
图6是本发明实施例中液压系统的控制方法流程图。
图中:1、风力发电机,2、塔筒,3、桁架结构,4、锚链,5、浮筒,6、波浪能发电模块,7、液压系统,8、第一铰链,9、液压缸,10、第二铰链,11、第三铰链,12、连接臂,13、浮子。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,以下结合实施例及其附图对本发明作进一步说明。
实施例
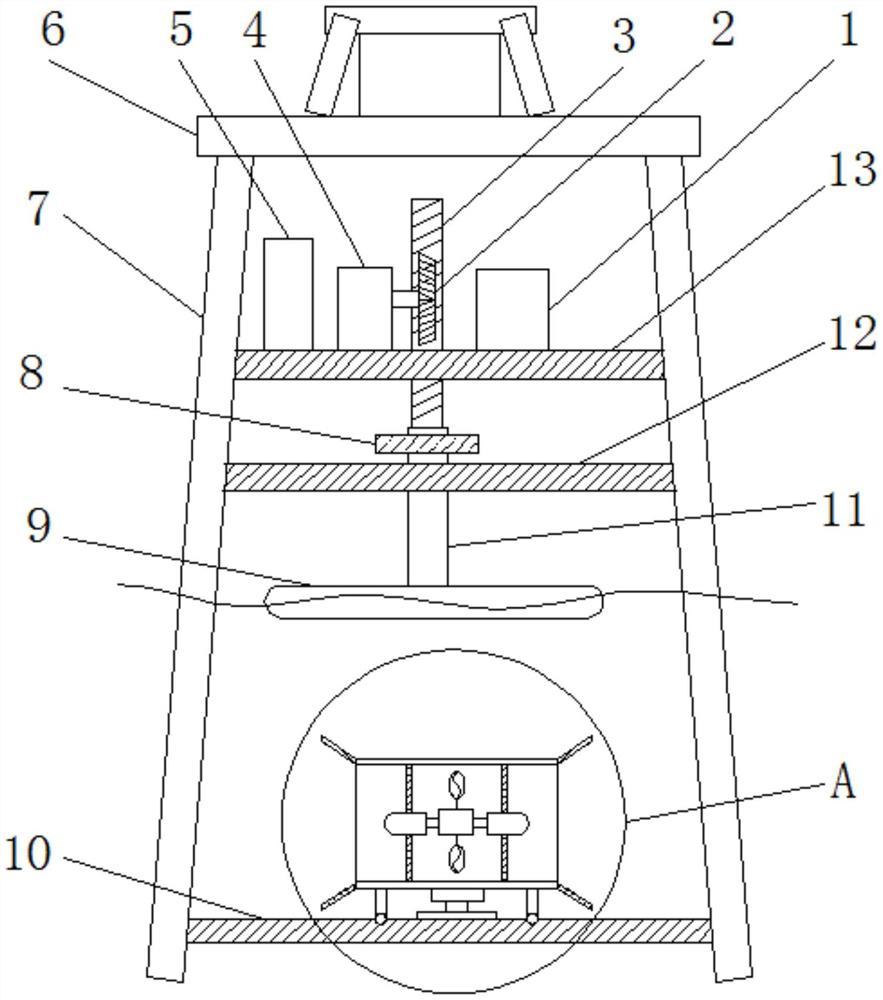
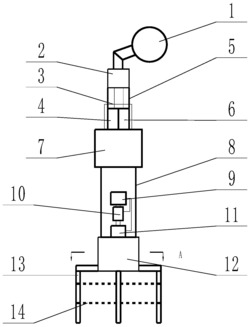
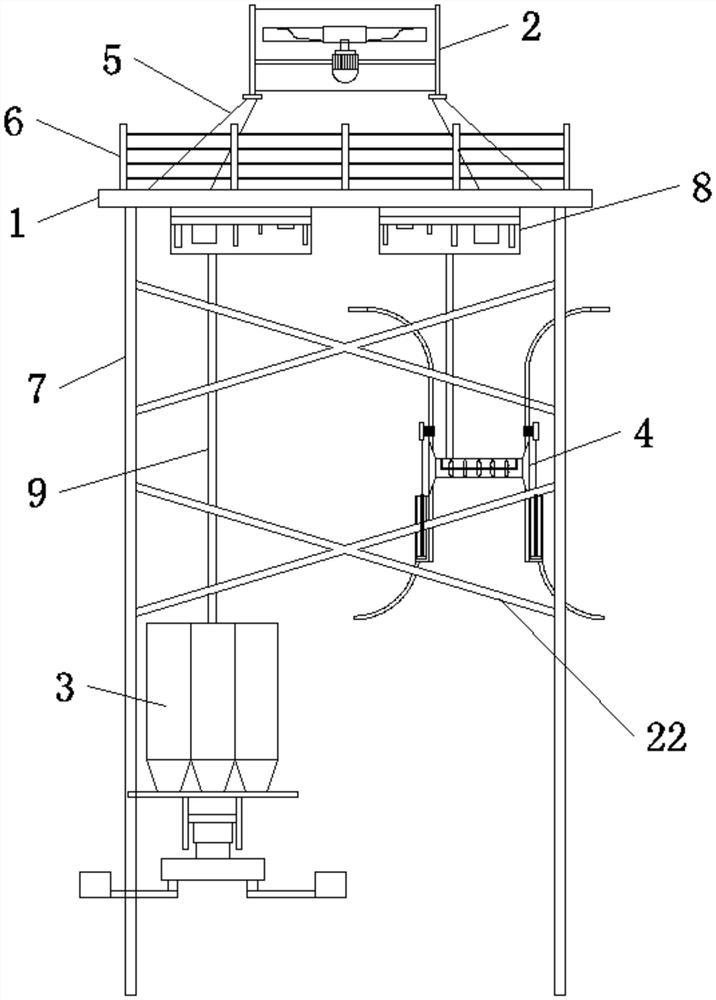
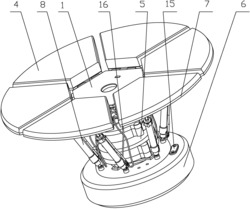
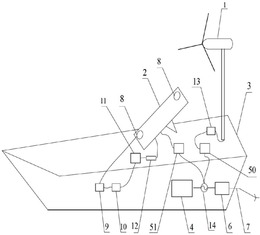
参见图1,本实施例的漂浮式风能-波浪能联合发电装置包括风力发电机1,塔筒2,桁架结构3,锚链4和浮筒5。风力发电机1采用兆瓦级水平轴风力发电机,叶片在风力作用下旋转,将风能转换为旋转的机械能,从而驱动发电机发电,风力发电机1通过塔筒2与桁架结构3和浮筒5组成的半潜式平台相连,半潜式平台通过锚链4与海床相连。波浪能发电模块6为漂浮摆式波浪能发电装置,三组波浪能发电装置对称分布于每个浮筒5外侧,互为120°。
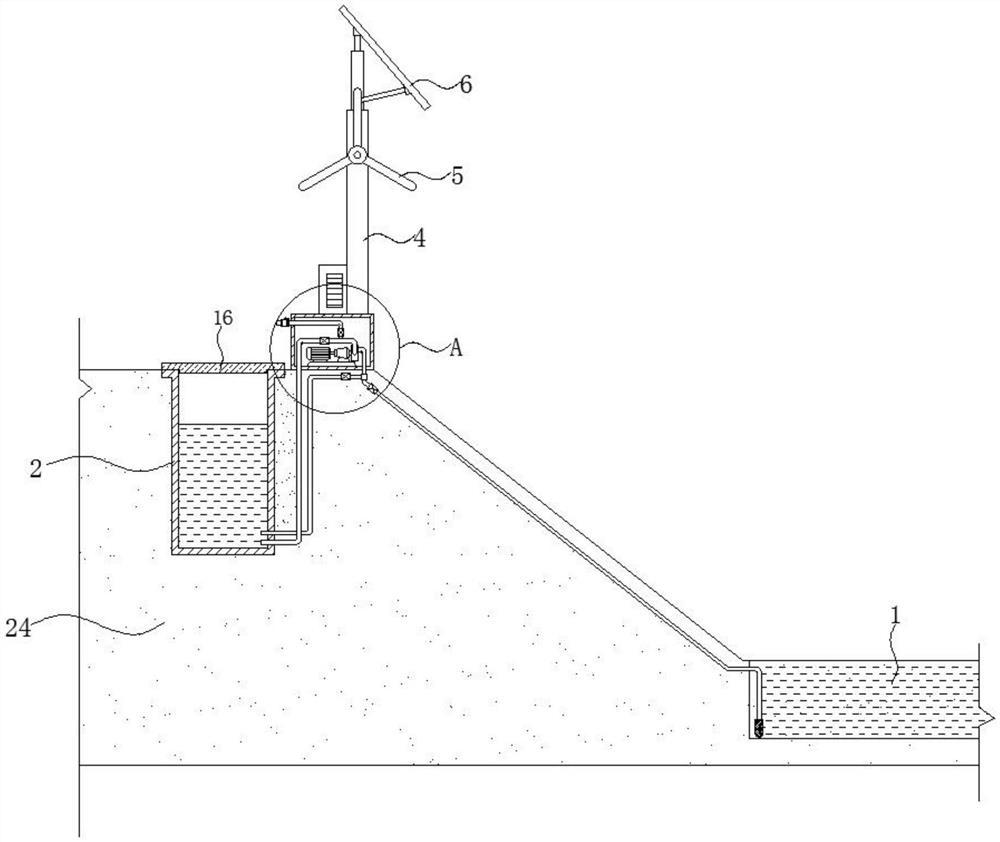
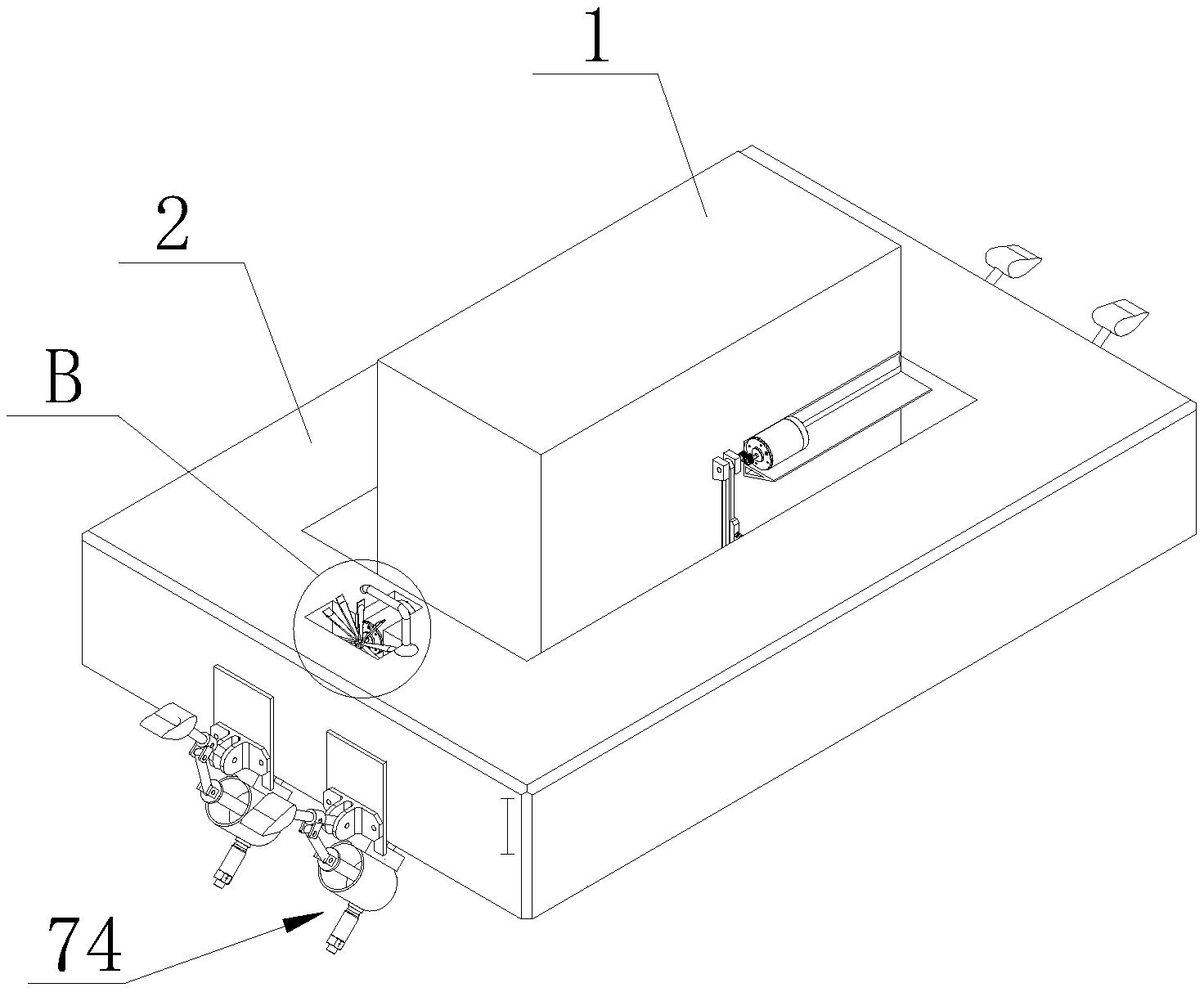
参见图2,波浪能发电模块6包括液压系统7,第一铰链8,液压缸9,第二铰链10,第三铰链11,连接臂12和浮子13。浮子13通过连接臂12,第三铰链11与浮筒5相连。同时,连接臂12通过第二铰链10,液压缸9,第一铰链8与浮筒5相连。波浪能发电模块6的液压系统7位于第一铰链8上方。其工作原理为:浮子13在海水的作用下上下起伏,带动连接臂12绕第三铰链11摆动,同时浮筒5与连接臂12的相对运动使得液压缸9做往复运动,驱动液压系统7运转并带动液压马达和发电机旋转发电,将波浪能量转换为电能,有效地提高了系统的发电功率。
如图3、图4所示,分别为波浪能发电模块6的工作状态与停机状态。当检测波高低于允许波高上限时,波浪能发电模块正常运行,浮子位于海面并随着波浪上下起伏,捕获波浪能量;当检测波高高于波高上限时,波浪能发电模块停机,波浪能发电模块被提起离开海面并通过液压系统7将其锁定在空中,避免恶劣海况对设备可能造成的损坏。
如图5、图6所示,波浪能发电模块在工作状态下对其液压系统应用控制方法如下:
步骤1)设定波浪能发电模块的工作波高范围,波高上限为hmax;
步骤2)实时检测波高值h,联合发电装置的摇摆运动的角速度ωp及其方向,三组波浪能发电模块的角速度ω1,ω2,ω3及其方向;
步骤3)判断当前波高值是否在波浪能发电模块工作波高范围以内,若h>hmax,则通过液控单向阀锁定液压缸,将波浪能发电模块提离水面锁定并停止工作;
步骤4)若h≤hmax,则根据联合发电装置的摇摆运动方向和三组波浪能发电模块位置计算得到三组波浪能发电模块与联合发电装置摇摆运动所在平面的夹角θ1,θ2,θ3;
步骤5)计算三组波浪能发电模块角速度ω1,ω2,ω3在联合发电装置摇摆运动所在平面内投影的角速度,计算公式为:
步骤6)以联合发电装置摇摆运动方向为正方向,判断ωp-ωi的符号,若ωp-ωi>0,即表示在该平面内波浪能发电模块相对于联合发电装置的相对角速度为负,则需增大该波浪能发电模块的液压系统阻尼;若ωp-ωi<0,即表示在该平面内波浪能发电模块相对于联合发电装置的相对角速度为正,则需减小该波浪能发电模块的液压系统阻尼;
步骤7)计算三组波浪能发电模块中液压缸的最优阻尼B1,B2,B3,求解条件为:
在此限制条件下结合步骤6),通过数值方法确定允许范围内液压缸的最优阻尼B1,B2,B3;
步骤8)根据液压缸的最优阻尼B1,B2,B3控制调节式节流阀以达到该阻尼值;
步骤9)重复步骤2)~8),直至装置停止工作。
一种漂浮式风能-波浪能联合发电装置及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0