









专利摘要
本发明提供了一种太阳帆板展开试验系统及其操作方法,用于对卫星的太阳电池阵帆板进行地面展开试验,所述太阳帆板展开试验系统包括气浮平台装置、移动式位姿调整平台和自动化测控系统,所述气浮平台装置用于承载所述太阳电池阵帆板,所述移动式位姿调整平台承载并固定所述卫星的星体,所述太阳电池阵帆板与所述星体刚性连接,所述自动化测控系统固定于所述气浮平台装置上,并与所述太阳电池阵帆板在同一水平线上分布;本发明采取模块化设计的理念,设计符合人机工程学,便于制造、操作与维护;系统具备兼容性,可适用于卫星太阳帆板以及其它活动部件的试验要求。
权利要求
1.一种太阳帆板展开试验系统,所述太阳帆板展开试验系统用于对卫星的太阳电池阵帆板进行地面展开试验,其特征在于,所述太阳帆板展开试验系统包括气浮平台装置、移动式位姿调整平台和自动化测控系统,其中:
所述气浮平台装置用于承载所述太阳电池阵帆板;
所述移动式位姿调整平台承载并固定所述卫星的星体,所述太阳电池阵帆板与所述星体刚性连接,所述自动化测控系统固定于所述气浮平台装置上,并与所述太阳电池阵帆板在同一水平线上分布;
所述自动化测控系统确定所述太阳电池阵帆板在所述气浮平台装置上的目标姿态和目标三维位置;
所述自动化测控系统观测所述太阳电池阵帆板在所述气浮平台装置上的实时姿态和实时三维位置;
所述自动化测控系统比较所述目标姿态与所述实时姿态,得到方位角偏移量与俯仰角偏移量;
所述自动化测控系统比较所述目标三维位置与所述实时三维位置,得到高度偏移量;
所述自动化测控系统根据所述方位角偏移量控制所述移动式位姿调整平台在第一平面上进行旋转,以带动所述星体在所述第一平面上进行旋转;
所述自动化测控系统根据所述俯仰角偏移量控制所述移动式位姿调整平台在第二平面上进行旋转,以带动所述星体在所述第二平面上进行旋转;
所述自动化测控系统根据所述高度偏移量控制所述移动式位姿调整平台沿所述第一平面与所述第二平面的公共直线进行升降运动,以带动所述星体在垂直方向进行升降运动;
所述第一平面与所述第二平面垂直,所述第二平面为所述太阳电池阵帆板的展开面。
2.如权利要求1所述的太阳帆板展开试验系统,其特征在于,所述气浮平台装置包括大理石平台和气浮垫,其中:
所述大理石平台用于承载所述太阳电池阵帆板;
所述气浮垫固定在所述太阳电池阵帆板的底部,并放置在所述大理石平台上,所述气浮垫和所述大理石平台之间具有气膜,以减小所述气浮垫与所述大理石平台之间的摩擦力。
3.如权利要求1所述的太阳帆板展开试验系统,其特征在于,所述移动式位姿调整平台包括方位转台、程控移载车、升降装置和翻转装置,其中:
所述方位转台能够在第一平面上进行旋转,以带动所述星体在所述第一平面上进行旋转;
所述翻转装置能够在第二平面上进行旋转,以带动所述星体在所述第二平面上进行旋转;
所述升降装置能够进行垂直方向的升降运动,以带动所述星体在垂直方向上升降运动;
所述程控移载车能够进行在第三平面上进行平移,以带动所述星体在所述第三平面上进行平移,所述第三平面均与所述第一平面及所述第二平面垂直。
4.如权利要求3所述的太阳帆板展开试验系统,其特征在于,所述自动化测控系统包括:立体靶标、安装定位工装、计算机、位置解算模块,以及相机与光源组件,其中:
所述立体靶标固定于所述太阳电池阵帆板上,用于向所述相机与光源组件发送所述实时姿态和所述实时三维位置;
所述安装定位工装用于固定所述相机与光源组件,以使所述相机与光源组件与所述立体靶标位于同一水平线上;
所述相机与光源组件用于观测所述太阳电池阵帆板的实时姿态和实时三维位置;
所述计算机确定所述太阳电池阵帆板的目标姿态和目标三维位置;
所述位置解算模块比较所述目标姿态与所述实时姿态,得到方位角偏移量与俯仰角偏移量;
所述位置解算模块比较所述目标三维位置与所述实时三维位置,得到高度偏移量;
所述计算机根据所述方位角偏移量控制所述移动式位姿调整平台在第一平面上进行旋转;
所述计算机根据所述俯仰角偏移量控制所述移动式位姿调整平台在第二平面上进行旋转;
所述计算机根据所述高度偏移量控制所述移动式位姿调整平台进行垂直方向的升降运动。
5.如权利要求4所述的太阳帆板展开试验系统,其特征在于,所述计算机判断所述方位角偏移量是否在第一误差范围内,若是则锁定所述方位转台,否则根据所述方位角偏移量驱动所述方位转台,所述计算机获取所述方位转台的转动角度,判断所述方位转台是否转动到位;
所述计算机判断所述俯仰角偏移量是否在第二误差范围内,若是则锁定所述翻转装置,否则根据所述俯仰角偏移量驱动所述翻转装置,所述计算机获取所述翻转装置的转动角度,判断所述翻转装置是否转动到位。
6.如权利要求4所述的太阳帆板展开试验系统,其特征在于,所述计算机判断所述高度偏移量是否在第三误差范围内,若是则锁定所述升降装置,否则根据所述高度偏移量驱动所述升降装置,所述计算机获取所述升降装置的移动距离,判断所述升降装置是否移动到位。
7.如权利要求3所述的太阳帆板展开试验系统,其特征在于,所述目标姿态为所述太阳电池阵帆板上的参考靶标与所述第一平面的角度及与所述第二平面的角度;
所述目标三维位置为所述太阳电池阵帆板上的参考靶标的在所述第三平面上的坐标,以及在所述第一平面与所述第二平面的公共直线上的坐标。
8.一种太阳帆板展开试验系统的操作方法,其特征在于,所述太阳帆板展开试验系统的操作方法包括:所述太阳帆板展开试验系统对卫星的太阳电池阵帆板进行地面展开试验,其中:
将所述太阳电池阵帆板与所述卫星的星体刚性连接;
将所述星体放置于移动式位姿调整平台上并固定;
将自动化测控系统固定于气浮平台装置上,并使所述自动化测控系统与所述太阳电池阵帆板在同一水平线上分布;
所述自动化测控系统确定所述太阳电池阵帆板在所述气浮平台装置上的目标姿态和目标三维位置;
所述自动化测控系统观测所述太阳电池阵帆板在所述气浮平台装置上的实时姿态和实时三维位置;
所述自动化测控系统比较所述目标姿态与所述实时姿态,得到方位角偏移量与俯仰角偏移量;
所述自动化测控系统比较所述目标三维位置与所述实时三维位置,得到高度偏移量;
所述自动化测控系统根据所述方位角偏移量控制所述移动式位姿调整平台在第一平面上进行旋转,以带动所述星体在所述第一平面上进行旋转;
所述自动化测控系统根据所述俯仰角偏移量控制所述移动式位姿调整平台在第二平面上进行旋转,以带动所述星体在所述第二平面上进行旋转;
所述自动化测控系统根据所述高度偏移量控制所述移动式位姿调整平台沿所述第一平面与所述第二平面的公共直线进行升降运动,以带动所述星体在垂直方向进行升降运动;
所述第一平面与所述第二平面垂直,所述第二平面为所述太阳电池阵帆板的展开面。
说明书
技术领域
本发明涉及卫星测试技术领域,特别涉及一种太阳帆板展开试验系统及其操作方法。
背景技术
太阳帆板属于航天器能源单机,负责航天器的电能供给,因此帆板展开的可靠性直接关系航天任务的成败。为验证帆板展开的可靠性,需要在地面上进行多次帆板展开试验。
帆板展开试验需要地检设备的支持去模拟空间中的无重力环境,传统的帆板桁架式展开装置为桁架与二轴转台。通过二轴转台调整航天器和帆板的位置姿态,再通过桁架、轴承和吊挂将帆板悬空,以抵消帆板自身的重力,进而模拟空间中的无重力环境。
然而,桁架的调整和测试需要耗费大量的人力和时间,针对不同型号的帆板,需要对桁架进行相应的调整,增加了工作量和研制生产周期的时间成本。另外,由于帆板属于高精度设备,在展开试验前需要二轴转台对航天器与帆板组合体的位姿进行调整以满足进行试验的条件,这种调整往往通过经纬仪测量配合人工手动操控转台来进行,需要多人协同操作且耗费时间较长。
太阳帆板作为整个卫星的能量来源,在发射阶段处于收拢压紧状态,在卫星入轨后要实现展开与对日定向,在变轨时要实现再次收拢。为了保证机构展开的可靠性,需要在地面进行一系列的验证试验,而地面验证试验时重力的存在,会对帆板铰链造成损伤,因此需要设计一套装置来克服重力影响。微型卫星的太阳帆板与普通卫星的太阳帆板相比,具有尺寸小、重量轻、机动性强、成本控制严格、研制周期短等特点。目前,应用于太阳帆板地面展开试验的装置从原理分主要有两种,一种是气浮式,一种是吊挂式。前者利用气足或者悬吊氦气球的方式,相关专利见:一种太阳翼电池板无摩擦地面展开装置(CN103050556B)与氦气球悬挂重力卸载装置(CN203064210U)。气足的方案只能实现平行于气足平面的平移,无法进行翻转试验,同时成本昂贵,需要专用的试验台(超高精度大理石)。悬吊氦气球的方式体积很庞大,往往比帆板的自身的体积要大一倍以上,并需要配备气源等一系列设备,提供的拉力范围有限,试验场所受限。后者的相关专利见:一种零重力悬挂式展开试验装置(专利号:CN201010108589)、一种二维展开太阳翼重力卸载装置(专利号:CN103407589A)、一种悬挂式重力补偿的太阳翼地面三维展开试验装置(专利号:CN103010493A)、追随式零重力模拟试验方法(专利号:CN101482455B)。现有吊挂式专利的方案与本专利讨论的展开试验装置形式不同,吊挂式试验装置摩擦力较大,使用前需要调试桁架,不适用于大型可展开机构。
发明内容
本发明的目的在于提供一种太阳帆板展开试验系统及其操作方法,以解决现有的航天器与帆板组合体的位姿需要人工操作转台进行调整的问题。
为解决上述技术问题,本发明提供一种太阳帆板展开试验系统,所述太阳帆板展开试验系统用于对卫星的太阳电池阵帆板进行地面展开试验,所述太阳帆板展开试验系统包括气浮平台装置、移动式位姿调整平台和自动化测控系统,其中:
所述气浮平台装置用于承载所述太阳电池阵帆板;
所述移动式位姿调整平台承载并固定所述卫星的星体,所述太阳电池阵帆板与所述星体刚性连接,所述自动化测控系统固定于所述气浮平台装置上,并与所述太阳电池阵帆板在同一水平线上分布;
所述自动化测控系统确定所述太阳电池阵帆板在所述气浮平台装置上的目标姿态和目标三维位置;
所述自动化测控系统观测所述太阳电池阵帆板在所述气浮平台装置上的实时姿态和实时三维位置;
所述自动化测控系统比较所述目标姿态与所述实时姿态,得到方位角偏移量与俯仰角偏移量;
所述自动化测控系统比较所述目标三维位置与所述实时三维位置,得到高度偏移量;
所述自动化测控系统根据所述方位角偏移量控制所述移动式位姿调整平台在第一平面上进行旋转,以带动所述星体在所述第一平面上进行旋转;
所述自动化测控系统根据所述俯仰角偏移量控制所述移动式位姿调整平台在第二平面上进行旋转,以带动所述星体在所述第二平面上进行旋转;
所述自动化测控系统根据所述高度偏移量控制所述移动式位姿调整平台沿所述第一平面与所述第二平面的公共直线进行升降运动,以带动所述星体在垂直方向进行升降运动;
所述第一平面与所述第二平面垂直,所述第二平面为所述太阳电池阵帆板的展开面。
可选的,在所述的太阳帆板展开试验系统中,所述气浮平台装置包括大理石平台和气浮垫,其中:
所述大理石平台用于承载所述太阳电池阵帆板;
所述气浮垫固定在所述太阳电池阵帆板的底部,并放置在所述大理石平台上,所述气浮垫和所述大理石平台之间具有气膜,以减小所述气浮垫与所述大理石平台之间的摩擦力。
可选的,在所述的太阳帆板展开试验系统中,所述移动式位姿调整平台包括方位转台、程控移载车、升降装置和翻转装置,其中:
所述方位转台能够在第一平面上进行旋转,以带动所述星体在所述第一平面上进行旋转;
所述翻转装置能够在第二平面上进行旋转,以带动所述星体在所述第二平面上进行旋转;
所述升降装置能够进行垂直方向的升降运动,以带动所述星体在垂直方向上升降运动;
所述程控移载车能够进行在所述第三平面上进行平移,以带动所述星体在所述第三平面上进行平移,所述第三平面均与所述第一平面及所述第二平面垂直。
可选的,在所述的太阳帆板展开试验系统中,所述自动化测控系统包括:立体靶标、安装定位工装、计算机、位置解算模块,以及相机与光源组件,其中:
所述立体靶标固定于所述太阳电池阵帆板上,用于向所述相机与光源组件发送所述实时姿态和所述实时三维位置;
所述安装定位工装用于固定所述相机与光源组件,以使所述相机与光源组件与所述立体靶标位于同一水平线上;
所述相机与光源组件用于观测所述太阳电池阵帆板实时姿态和实时三维位置;
所述计算机确定所述太阳电池阵帆板的目标姿态和目标三维位置;
所述位置解算模块比较所述目标姿态与所述实时姿态,得到方位角偏移量与俯仰角偏移量;
所述位置解算模块比较所述目标三维位置与所述实时三维位置,得到高度偏移量;
所述计算机根据所述方位角偏移量控制所述移动式位姿调整平台在第一平面上进行旋转;
所述计算机根据所述俯仰角偏移量控制所述移动式位姿调整平台在第二平面上进行旋转;
所述计算机根据所述高度偏移量控制所述移动式位姿调整平台进行垂直方向的升降运动。
可选的,在所述的太阳帆板展开试验系统中,所述计算机判断所述方位角偏移量是否在第一误差范围内,若是则锁定所述方位转台,否则根据所述方位角偏移量驱动所述方位转台,所述计算机获取所述方位转台的转动角度,判断所述方位转台是否转动到位;
所述计算机判断所述俯仰角偏移量是否在第二误差范围内,若是则锁定所述翻转装置,否则根据所述俯仰角偏移量驱动所述翻转装置,所述计算机获取所述翻转装置的转动角度,判断所述翻转装置是否转动到位。
可选的,在所述的太阳帆板展开试验系统中,所述计算机判断所述高度偏移量是否在第三误差范围内,若是则锁定所述升降装置,否则根据所述高度偏移量驱动所述升降装置,所述计算机获取所述升降装置的移动距离,判断所述升降装置是否移动到位。
可选的,在所述的太阳帆板展开试验系统中,所述目标姿态为所述太阳电池阵上的参考靶标与所述第一平面的角度及与所述第二平面的角度;
所述目标三维位置为所述太阳电池阵上的参考靶标的在所述第三平面上的坐标,以及在所述第一平面与所述第二平面的公共直线上的坐标。
本发明还提供一种太阳帆板展开试验系统的操作方法,所述太阳帆板展开试验系统的操作方法包括:所述太阳帆板展开试验系统对卫星的太阳电池阵帆板进行地面展开试验,其中:
将所述太阳电池阵帆板与所述卫星的星体刚性连接;
将所述星体放置于移动式位姿调整平台上并固定;
将自动化测控系统固定于所述气浮平台装置上,并使所述自动化测控系统与所述太阳电池阵帆板在同一水平线上分布;
所述自动化测控系统确定所述太阳电池阵帆板在所述气浮平台装置上的目标姿态和目标三维位置;
所述自动化测控系统观测所述太阳电池阵帆板在所述气浮平台装置上的实时姿态和实时三维位置;
所述自动化测控系统比较所述目标姿态与所述实时姿态,得到方位角偏移量与俯仰角偏移量;
所述自动化测控系统比较所述目标三维位置与所述实时三维位置,得到高度偏移量;
所述自动化测控系统根据所述方位角偏移量控制所述移动式位姿调整平台在第一平面上进行旋转,以带动所述星体在所述第一平面上进行旋转;
所述自动化测控系统根据所述俯仰角偏移量控制所述移动式位姿调整平台在第二平面上进行旋转,以带动所述星体在所述第二平面上进行旋转;
所述自动化测控系统根据所述高度偏移量控制所述移动式位姿调整平台沿所述第一平面与所述第二平面的公共直线进行升降运动,以带动所述星体在垂直方向进行升降运动;
所述第一平面与所述第二平面垂直,所述第二平面为所述太阳电池阵帆板的展开面。
在本发明提供的太阳帆板展开试验系统及其操作方法中,通过自动化测控系统确定太阳电池阵帆板的目标姿态和目标三维位置,观测太阳电池阵帆板实时姿态和实时三维位置,并将实时参数与目标参数进行比较,得到方位角偏移量、俯仰角偏移量与高度偏移量,根据三个偏移量控制移动式位姿调整平台在各个平面上进行旋转或移动,以带动星体进行旋转和移动,实现了自动调整航天器与帆板组合体的姿态及三维位置,试验开展时,航天器帆板组合体和移动式位姿调整平台机械连接后,通过移动式位姿调整平台携带组合体行至气浮平台装置附近的既定工位,自动化测控系统可进行航天器与帆板组合体的自动位姿测量和位姿调整。
另外,本发明弥补了传统展开设备的不足。太阳帆板气浮展开装置在太阳帆板下端安装气浮垫组件,配气台提供一定压力气体使气浮垫组件浮起形成气膜以承担太阳电池阵重量来模拟失重条件,通过调整气浮垫组件的数量和位置即可应用于不同型号的帆板。
本发明属于机构设计领域,采取模块化设计的理念,设计符合人机工程学,便于制造、操作与维护;系统具备兼容性,可适用于卫星太阳帆板以及其它活动部件的试验要求。
附图说明
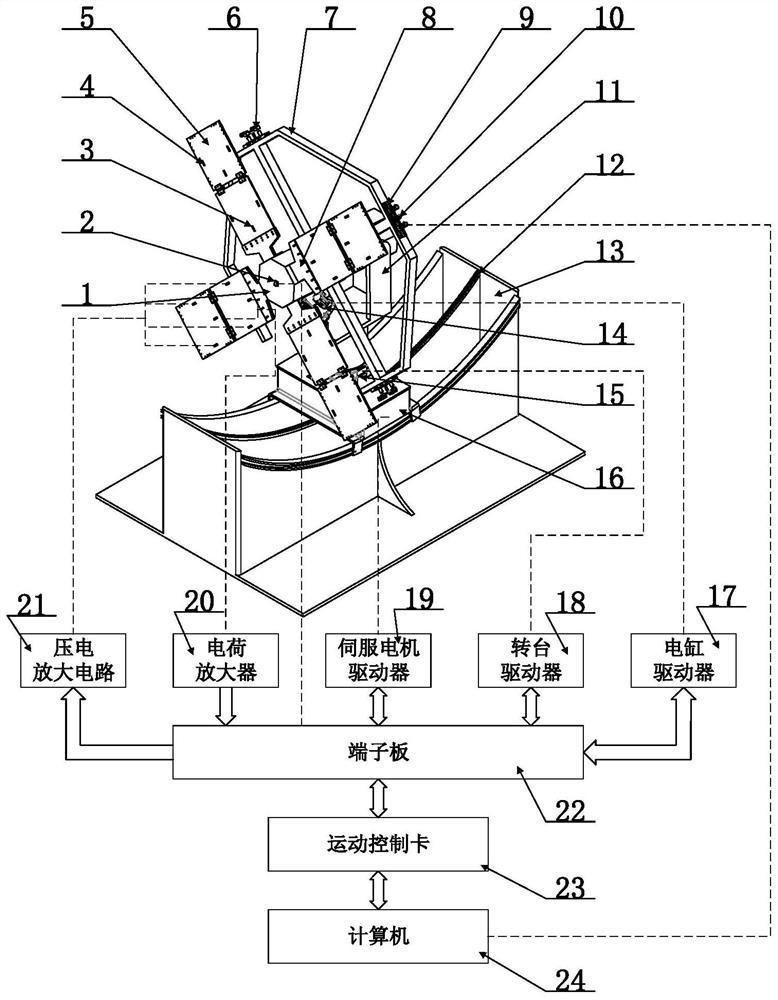
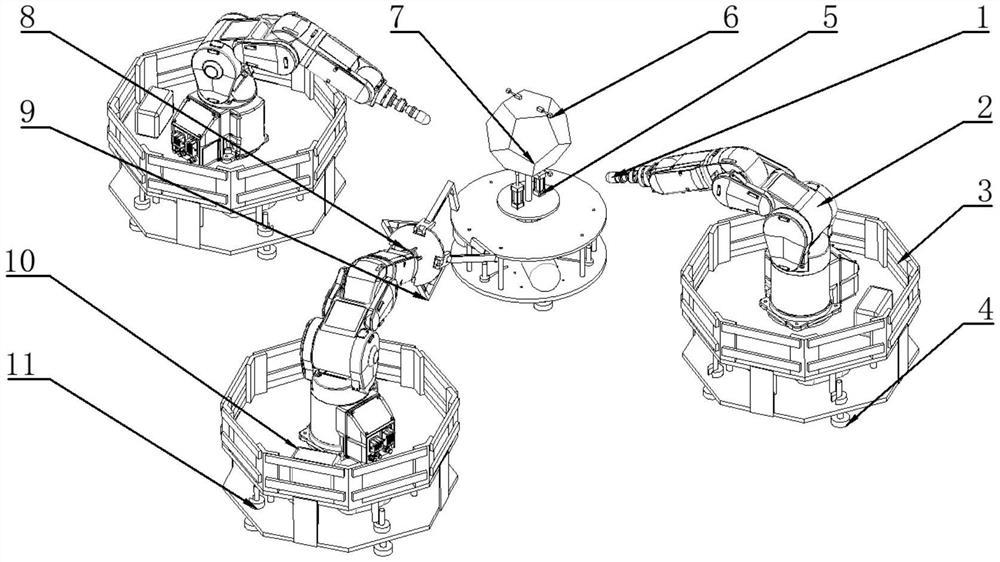
图1是本发明一实施例的太阳帆板展开试验系统示意图;
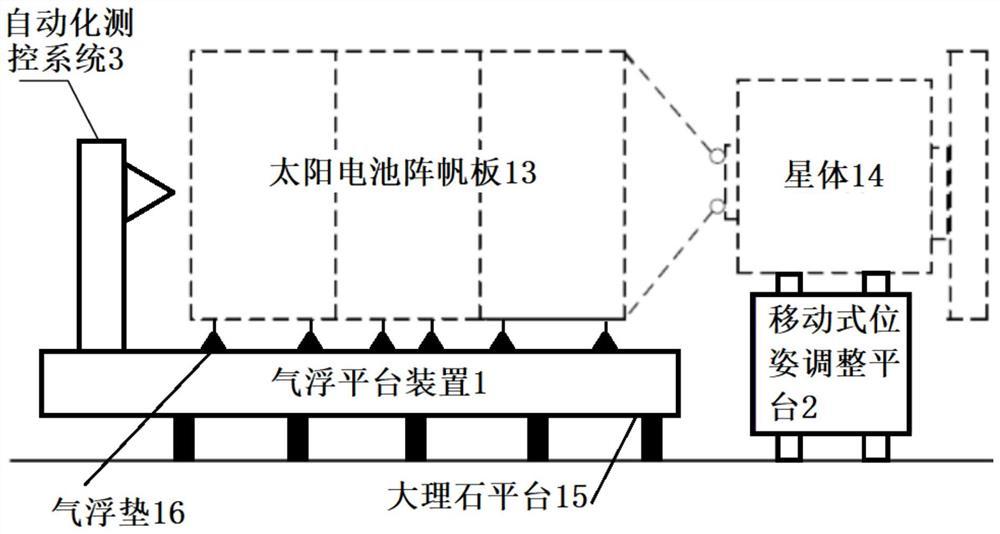
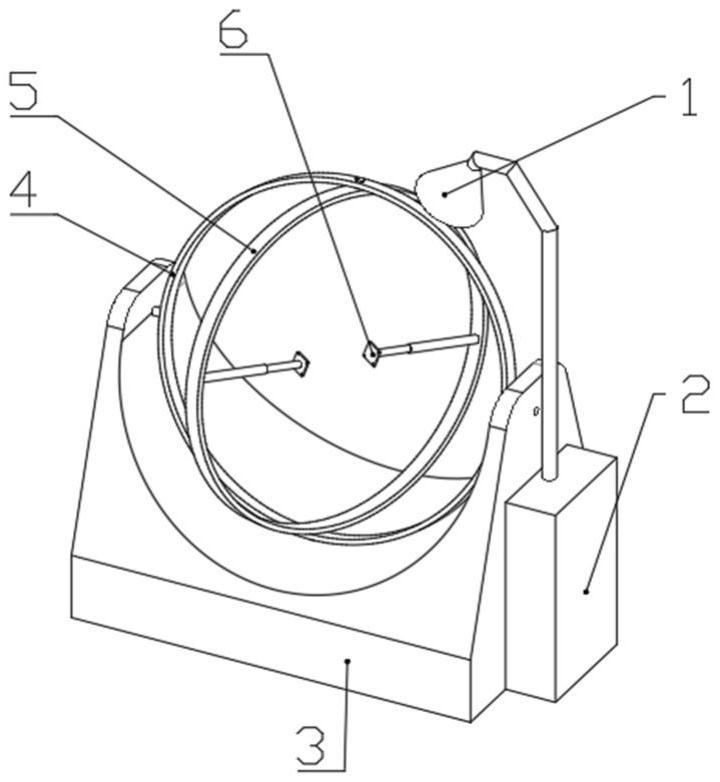
图2是本发明一实施例的太阳帆板展开试验系统中移动式位姿调整平台示意图;
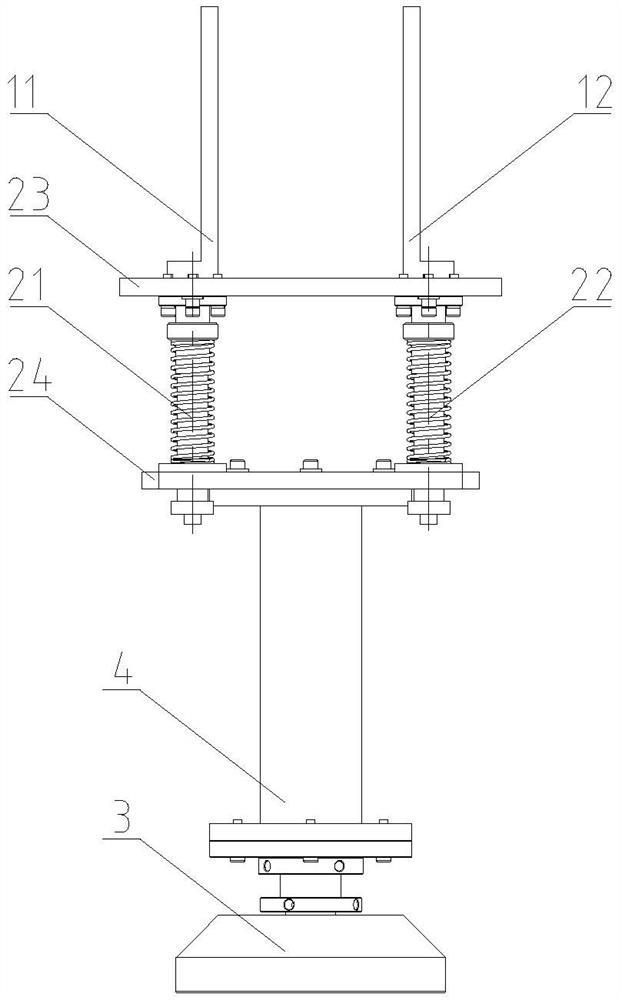
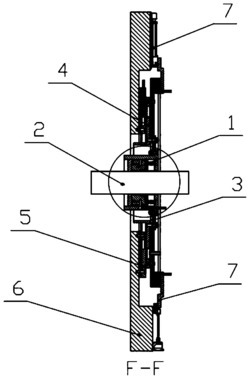
图3是本发明一实施例的太阳帆板展开试验系统中自动化测控系统示意图;
图中所示:1-气浮平台装置;2-移动式位姿调整平台;3-自动化测控系统;4-方位转台;5-程控移载车;6-升降装置;7-翻转装置;8-立体靶标;9-安装定位工装;10-计算机;11-位置解算模块;12-相机与光源组件;13-太阳电池阵帆板;14-星体;15-大理石平台;16-气浮垫。
具体实施方式
以下结合附图和具体实施例对本发明提出的太阳帆板展开试验系统及其操作方法作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
本发明的核心思想在于提供一种太阳帆板展开试验系统及其操作方法,以解决现有的航天器与帆板组合体的位姿需要人工操作转台进行调整的问题。
为实现上述思想,本发明提供了一种太阳帆板展开试验系统及其操作方法,所述太阳帆板展开试验系统用于对卫星的太阳电池阵帆板进行地面展开试验,所述太阳帆板展开试验系统包括气浮平台装置、移动式位姿调整平台和自动化测控系统,其中:所述气浮平台装置承载并固定所述太阳电池阵帆板,所述移动式位姿调整平台承载并固定所述卫星的星体,所述太阳电池阵帆板与所述星体刚性连接,所述自动化测控系统固定于所述气浮平台装置上,并与所述太阳电池阵帆板在同一水平线上分布;所述自动化测控系统确定所述太阳电池阵帆板的目标姿态和目标三维位置;所述自动化测控系统观测所述太阳电池阵帆板实时姿态和实时三维位置;所述自动化测控系统比较所述目标姿态与所述实时姿态,得到方位角偏移量与俯仰角偏移量;所述自动化测控系统比较所述目标三维位置与所述实时三维位置,得到高度偏移量;所述自动化测控系统根据所述方位角偏移量控制所述移动式位姿调整平台在第一平面上进行旋转,以带动所述星体在所述第一平面上进行旋转;所述自动化测控系统根据所述俯仰角偏移量控制所述移动式位姿调整平台在第二平面上进行旋转,以带动所述星体在所述第二平面上进行旋转;所述自动化测控系统根据所述高度偏移量控制所述移动式位姿调整平台沿所述第一平面与所述第二平面的公共直线进行升降运动,以带动所述星体在垂直方向进行升降运动;所述第一平面与所述第二平面垂直,所述第二平面为所述太阳电池阵帆板的展开面。
<实施例一>
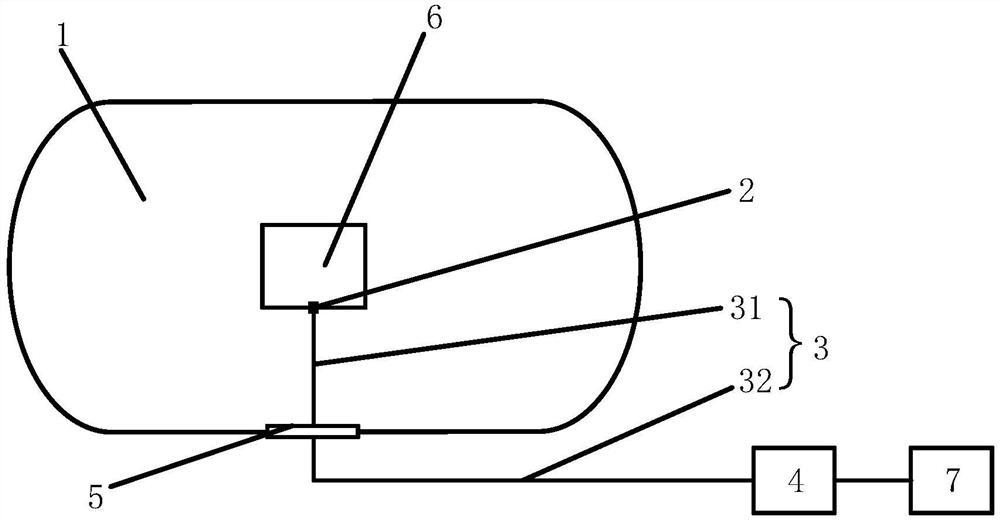
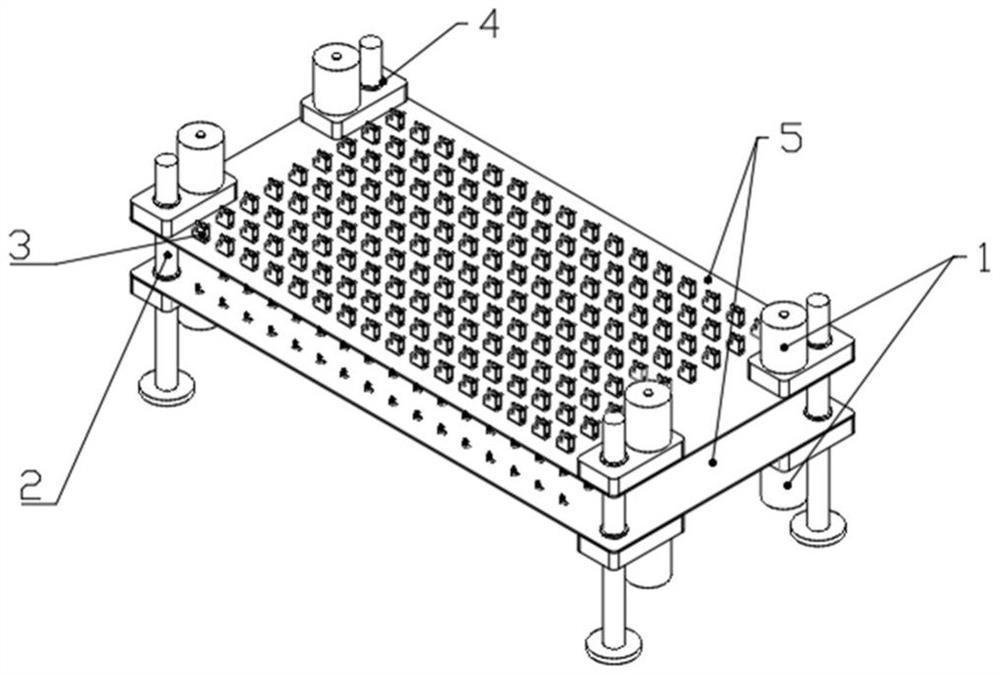
本实施例提供一种太阳帆板展开试验系统,所述太阳帆板展开试验系统用于对卫星的太阳电池阵帆板13进行地面展开试验,所述太阳帆板展开试验系统包括气浮平台装置1、移动式位姿调整平台2和自动化测控系统3,其中:所述气浮平台装置1用于承载所述太阳电池阵帆板13;所述移动式位姿调整平台2承载并固定所述卫星的星体14,所述太阳电池阵帆板13与所述星体14刚性连接,所述自动化测控系统3固定于所述气浮平台装置1上,并与所述太阳电池阵帆板13在同一水平线上分布;所述自动化测控系统3确定所述太阳电池阵帆板13在所述气浮平台装置1上的目标姿态和目标三维位置;所述自动化测控系统3观测所述太阳电池阵帆板13在所述气浮平台装置1上的实时姿态和实时三维位置;所述自动化测控系统3比较所述目标姿态与所述实时姿态,得到方位角偏移量与俯仰角偏移量;所述自动化测控系统3比较所述目标三维位置与所述实时三维位置,得到高度偏移量;所述自动化测控系统3根据所述方位角偏移量控制所述移动式位姿调整平台2在第一平面上进行旋转,以带动所述星体14在所述第一平面上进行旋转;所述自动化测控系统3根据所述俯仰角偏移量控制所述移动式位姿调整平台2在第二平面上进行旋转,以带动所述星体14在所述第二平面上进行旋转;所述自动化测控系统3根据所述高度偏移量控制所述移动式位姿调整平台2沿所述第一平面与所述第二平面的公共直线进行升降运动,以带动所述星体14在垂直方向进行升降运动;所述第一平面与所述第二平面垂直,所述第二平面为所述太阳电池阵帆板的展开面。
具体的,在所述的太阳帆板展开试验系统中,所述气浮平台装置1包括大理石平台15和气浮垫16,其中:所述大理石平台15用于承载所述太阳电池阵帆板13;所述气浮垫16固定在所述太阳电池阵帆板13的底部,并放置在所述大理石平台15上,所述气浮垫16和所述大理石平台15之间具有气膜,以减小所述气浮垫16与所述大理石平台15之间的摩擦力。
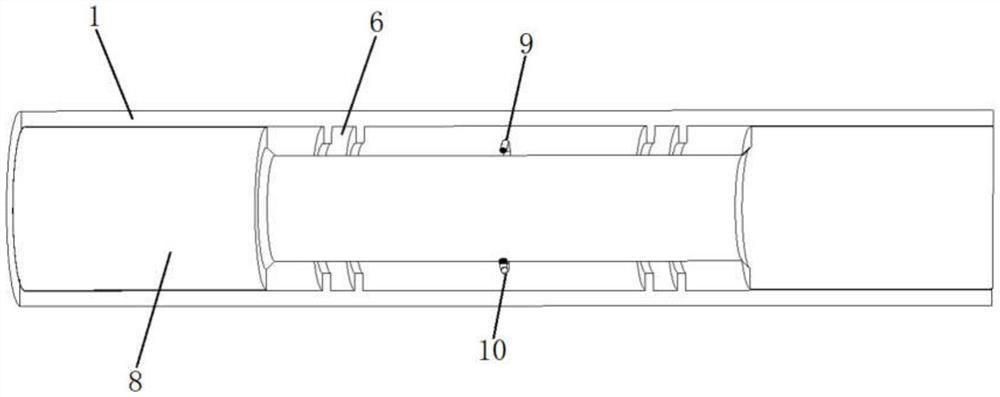
如图2所示,在所述的太阳帆板展开试验系统中,所述移动式位姿调整平台2包括方位转台4、程控移载车5、升降装置6和翻转装置7,其中:所述方位转台4能够在第一平面上进行旋转,以带动所述星体在所述第一平面上进行旋转;所述翻转装置7能够在第二平面上进行旋转,以带动所述星体在所述第二平面上进行旋转;所述升降装置6能够进行垂直方向的升降运动,以带动所述星体在垂直方向上升降运动;所述程控移载车5能够进行在所述第三平面上进行平移,以带动所述星体在所述第三平面上进行平移,所述第三平面均与所述第一平面及所述第二平面垂直。
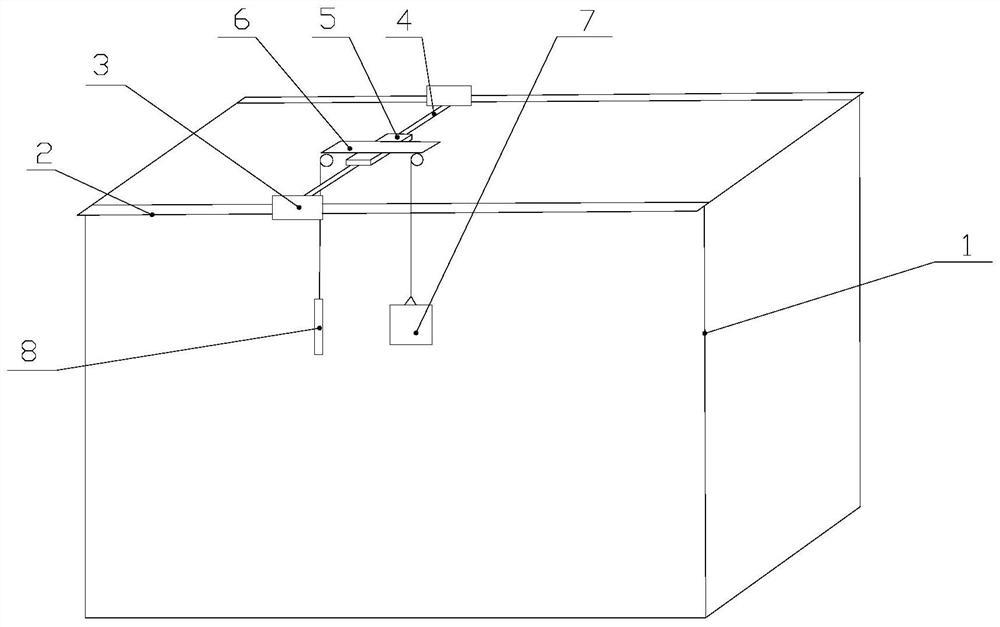
如图3所示,在所述的太阳帆板展开试验系统中,所述自动化测控系统3包括:立体靶标8、安装定位工装9、计算机10、位置解算模块11,以及相机与光源组件12,其中:所述立体靶标8固定于所述太阳电池阵帆板上,用于向所述相机与光源组件12发送所述实时姿态和所述实时三维位置;所述安装定位工装9用于固定所述相机与光源组件12,以使所述相机与光源组件12与所述立体靶标8位于同一水平线上;所述相机与光源组件12用于观测所述太阳电池阵帆板实时姿态和实时三维位置;所述计算机10确定所述太阳电池阵帆板的目标姿态和目标三维位置;所述位置解算模块11比较所述目标姿态与所述实时姿态,得到方位角偏移量与俯仰角偏移量;所述位置解算模块11比较所述目标三维位置与所述实时三维位置,得到高度偏移量;所述计算机10根据所述方位角偏移量控制所述移动式位姿调整平台2在第一平面上进行旋转;所述计算机10根据所述俯仰角偏移量控制所述移动式位姿调整平台2在第二平面上进行旋转;所述计算机10根据所述高度偏移量控制所述移动式位姿调整平台2进行垂直方向的升降运动。
具体的,在所述的太阳帆板展开试验系统中,所述计算机10判断所述方位角偏移量是否在第一误差范围内,若是则锁定所述方位转台4,否则根据所述方位角偏移量驱动所述方位转台4,所述计算机10获取所述方位转台4的转动角度,判断所述方位转台4是否转动到位;所述计算机10判断所述俯仰角偏移量是否在第二误差范围内,若是则锁定所述翻转装置7,否则根据所述俯仰角偏移量驱动所述翻转装置7,所述计算机10获取所述翻转装置7的转动角度,判断所述翻转装置7是否转动到位。所述计算机10判断所述高度偏移量是否在第三误差范围内,若是则锁定所述升降装置6,否则根据所述高度偏移量驱动所述升降装置6,所述计算机10获取所述升降装置6的移动距离,判断所述升降装置6是否移动到位。
可选的,在所述的太阳帆板展开试验系统中,所述目标姿态为所述太阳电池阵上的参考靶标与所述第一平面的角度及与所述第二平面的角度;
所述目标三维位置为所述太阳电池阵上的参考靶标的在所述第三平面上的坐标,以及在所述第一平面与所述第二平面的公共直线上的坐标。
在本发明提供的太阳帆板展开试验系统及其操作方法中,通过自动化测控系统3确定太阳电池阵帆板13的目标姿态和目标三维位置,观测太阳电池阵帆板13实时姿态和实时三维位置,并将实时参数与目标参数进行比较,得到方位角偏移量、俯仰角偏移量与高度偏移量,根据三个偏移量控制移动式位姿调整平台2在各个平面上进行旋转或移动,以带动星体14进行旋转和移动,实现了自动调整航天器与帆板组合体的姿态及三维位置,试验开展时,航天器帆板组合体和移动式位姿调整平台2机械连接后,通过移动式位姿调整平台2携带组合体行至气浮平台装置1附近的既定工位,自动化测控系统3可进行航天器与帆板组合体的自动位姿测量和位姿调整。
另外,本发明弥补了传统展开设备的不足。太阳帆板展开试验系统在太阳电池阵帆板13下端安装气浮垫组件16,配气台提供一定压力气体使气浮垫16组件浮起形成气膜以承担太阳电池阵帆板13的重量来模拟失重条件,通过调整气浮垫组件16的数量和位置即可应用于不同型号的帆板。
本发明属于卫星测试技术领域,采取模块化设计的理念,设计符合人机工程学,便于制造、操作与维护;系统具备兼容性,可适用于卫星太阳帆板以及其它活动部件的试验要求。
综上,上述实施例对太阳帆板展开试验系统的不同构型进行了详细说明,当然,本发明包括但不局限于上述实施中所列举的构型,任何在上述实施例提供的构型基础上进行变换的内容,均属于本发明所保护的范围。本领域技术人员可以根据上述实施例的内容举一反三。
<实施例二>
本实施例提供一种太阳帆板展开试验系统的操作方法,所述太阳帆板展开试验系统的操作方法包括:所述太阳帆板展开试验系统对卫星的太阳电池阵帆板13进行地面展开试验,其中:将所述太阳电池阵帆板13与所述卫星的星体14刚性连接;将所述星体14放置于移动式位姿调整平台2上并固定;将自动化测控系统3固定于所述气浮平台装置1上,并使所述自动化测控系统3与所述太阳电池阵帆板13在同一水平线上分布;所述自动化测控系统3确定所述太阳电池阵帆板13在所述气浮平台装置1上的目标姿态和目标三维位置;所述自动化测控系统3观测所述太阳电池阵帆板13在所述气浮平台装置1上的实时姿态和实时三维位置;所述自动化测控系统3比较所述目标姿态与所述实时姿态,得到方位角偏移量与俯仰角偏移量;所述自动化测控系统3比较所述目标三维位置与所述实时三维位置,得到高度偏移量;所述自动化测控系统3根据所述方位角偏移量控制所述移动式位姿调整平台2在第一平面上进行旋转,以带动所述星体14在所述第一平面上进行旋转;所述自动化测控系统3根据所述俯仰角偏移量控制所述移动式位姿调整平台2在第二平面上进行旋转,以带动所述星体14在所述第二平面上进行旋转;所述自动化测控系统3根据所述高度偏移量控制所述移动式位姿调整平台2沿所述第一平面与所述第二平面的公共直线进行升降运动,以带动所述星体14在垂直方向进行升降运动;所述第一平面与所述第二平面垂直,所述第二平面为所述太阳电池阵帆板的展开面。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
太阳帆板展开试验系统及其操作方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0