









专利摘要
本实用新型公开了一种空间机械臂地面微重力环境模拟装置。包括机械臂安装支架、弹性组件和单个平面气足,所述机械臂安装支架在所述弹性组件的顶端设置,所述弹性组件在所述单个平面气足的顶端设置,所述机械臂安装支架的中心和所述弹性组件的中心在水平面内的投影重合设置,所述弹性组件的中心和所述单个平面气足的中心在水平面内的投影重合设置。本实用新型能够解决多个单个平面气足之间受力不均导致的单个平面气足作用被弱化的问题。
权利要求
1.空间机械臂地面微重力环境模拟装置,包括机械臂安装支架、弹性组件和单个平面气足,所述机械臂安装支架在所述弹性组件的顶端设置,所述弹性组件在所述单个平面气足的顶端设置,其特征在于:所述机械臂安装支架的中心和所述弹性组件的中心在水平面内的投影重合设置,所述弹性组件的中心和所述单个平面气足的中心在水平面内的投影重合设置。
2.根据权利要求1所述空间机械臂地面微重力环境模拟装置,其特征在于:所述弹性组件包括上安装板、下安装板、第一弹性件和第二弹性件,所述第一弹性件的顶端和所述上安装板连接、底端和所述下安装板连接,所述第二弹性件的顶端和所述上安装板连接、底端和所述下安装板连接。
3.根据权利要求2所述空间机械臂地面微重力环境模拟装置,其特征在于:所述第一弹性件和所述第二弹性件关于所述弹性组件的中心对称设置,所述第一弹性件沿竖直方向延伸,所述第二弹性件沿竖直方向延伸。
4.根据权利要求3所述空间机械臂地面微重力环境模拟装置,其特征在于:所述机械臂安装支架包括第一安装板和第二安装板,所述第一安装板和所述第二安装板在所述弹性组件的顶端对称设置,所述第一安装板沿竖直方向延伸,所述第二安装板沿竖直方向延伸。
5.根据权利要求4所述空间机械臂地面微重力环境模拟装置,其特征在于:所述第一安装板和所述第一弹性件在水平面内的投影重合设置,所述第二安装板和所述第二弹性件在水平面内的投影重合设置。
6.根据权利要求2所述空间机械臂地面微重力环境模拟装置,其特征在于:所述第一弹性件的上表面和所述上安装板的下表面连接,所述第一弹性件的下表面和所述下安装板的上表面连接,所述第二弹性件的上表面和所述上安装板的下表面连接,所述第二弹性件的下表面和所述下安装板的上表面连接。
7.根据权利要求1所述空间机械臂地面微重力环境模拟装置,其特征在于:还包括中空设置的支撑立柱,所述弹性组件的底端和所述支撑立柱的顶端连接,所述支撑立柱的底端和所述单个平面气足的顶端连接。
8.根据权利要求7所述空间机械臂地面微重力环境模拟装置,其特征在于:所述弹性组件的中心和所述支撑立柱的中心在水平面内的投影重合设置,所述支撑立柱的中心和所述单个平面气足的中心在水平面内的投影重合设置。
说明书
技术领域
本实用新型涉及航空航天技术领域,具体涉及一种空间机械臂地面微重力环境模拟装置。
背景技术
近地空间站为“积木式”的组装结构,由核心舱、实验舱Ⅰ、实验舱Ⅱ、货运飞船及载人飞船等部分构成“T”字型结构。由于核心舱与功能舱在对接的时候一般只能进行轴向对接,因此在搭建空间站的过程中要用到转位机械臂,将轴向对接的功能舱转位到径向对接口,空出轴向对接口方便下一艘飞船进行对接,以完成空间站的建设。
这样就使用到空间转位机械臂,由于航天产品的特殊性,其对系统可靠性和安全性要求极高,为了保证航天设备在太空中能够按预期目标进行工作,航天产品在发射升空前都需要进行大量全面复杂的各项实验,用来检测航天器的相关性能指标是否满足设计要求。地面和太空最大的不同是重力环境,机械臂在太空中受到的重力环境很小,几乎可以忽略不计,要想在地面上对空间机械臂进行测试最重要的就要模拟出其在太空中所受的微重力环境。
为解决上述问题,专利号为201510945804.3公开的名为六自由度空间机械臂地面微重力等效实验装置及实验方法的中国专利,包括轴承装置A、支架气足装置B和滚轮气足装置C,轴承装置A实现机械臂b1关节的模拟微重力环境等效运动。滚轮气足装置C支持被支撑臂杆在平面上3个自由度的模拟微重力环境下运动和1个自由度的臂杆滚转运动。支架气足装置B支持被支撑关节在平面上3个自由度的模拟微重力环境下运动。
虽然上述技术方案能够通过检测空间机械臂各个关节的运动状态以及卫星载荷安装板上传感器和设备的信息实现在地面有效模拟空间机械臂在失重环境下的工作状态,解决了传统的空间机械臂地面模拟实验装置干扰力大或自由度少的问题,并可模拟在运动过程中对其它卫星载荷和设备的影响。
但是在上述技术方案中,第一气足装置和第二气足装置均包括平面气足组件、压力传感器、支杆组件和弹性组件。平面气足组件包括平面气足安装板和均布在所述平面气足安装板上的三个平面气足,三个平面气足之间彼此独立,容易导致三个平面气足各自受力不均,从而大幅弱化平面气足的作用。
发明内容
针对现有技术的不足,本实用新型公开一种空间机械臂地面微重力环境模拟装置,能够解决多个单个平面气足之间受力不均导致的单个平面气足作用被弱化的问题。
为实现以上目的,本实用新型通过以下技术方案予以实现:
空间机械臂地面微重力环境模拟装置,包括机械臂安装支架、弹性组件和单个平面气足,所述机械臂安装支架在所述弹性组件的顶端设置,所述弹性组件在所述单个平面气足的顶端设置,所述机械臂安装支架的中心和所述弹性组件的中心在水平面内的投影重合设置,所述弹性组件的中心和所述单个平面气足的中心在水平面内的投影重合设置。
优选的技术方案,所述弹性组件包括上安装板、下安装板、第一弹性件和第二弹性件,所述第一弹性件的顶端和所述上安装板连接、底端和所述下安装板连接,所述第二弹性件的顶端和所述上安装板连接、底端和所述下安装板连接。
进一步优选的技术方案,所述第一弹性件和所述第二弹性件关于所述弹性组件的中心对称设置,所述第一弹性件沿竖直方向延伸,所述第二弹性件沿竖直方向延伸。
进一步优选的技术方案,所述机械臂安装支架包括第一安装板和第二安装板,所述第一安装板和所述第二安装板在所述弹性组件的顶端对称设置,所述第一安装板沿竖直方向延伸,所述第二安装板沿竖直方向延伸。
进一步优选的技术方案,所述第一安装板和所述第一弹性件在水平面内的投影重合设置,所述第二安装板和所述第二弹性件在水平面内的投影重合设置。
进一步优选的技术方案,所述第一弹性件的上表面和所述上安装板的下表面连接,所述第一弹性件的下表面和所述下安装板的上表面连接,所述第二弹性件的上表面和所述上安装板的下表面连接,所述第二弹性件的下表面和所述下安装板的上表面连接。
优选的技术方案,还包括中空设置的支撑立柱,所述弹性组件的底端和所述支撑立柱的顶端连接,所述支撑立柱的底端和所述单个平面气足的顶端连接。
进一步优选的技术方案,所述弹性组件的中心和所述支撑立柱的中心在水平面内的投影重合设置,所述支撑立柱的中心和所述单个平面气足的中心在水平面内的投影重合设置。
本实用新型公开一种空间机械臂地面微重力环境模拟装置,具有以下优点:
所述第一弹性件和所述第二弹性件的顶端不伸出所述上安装板、底端不伸出下安装板,在吸收空间机械臂在在竖直方向的跳动过程,能够保持自身始终处在所述上安装板和所述下安装板之间,以避免和其他部件产生撞击或者摩擦。
空间机械臂在竖直方向由于跳动而产生作用力,在竖直方向,空间机械臂两侧的作用力直接传递至所述第一弹性件和所述第二弹性件,能够避免作用力在水平方向产生分力,从而有效减少本实用新型实施例所述空间机械臂地面微重力环境模拟装置在水平方向的晃动。
空间机械臂在竖直方向由于跳动而产生作用力,在竖直方向,作用力沿弹性组件传递至所述单个平面气足的中心,能够避免作用力在水平方向产生分力,从而进一步减少本实用新型实施例所述空间机械臂地面微重力环境模拟装置在水平方向的晃动。
附图说明
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
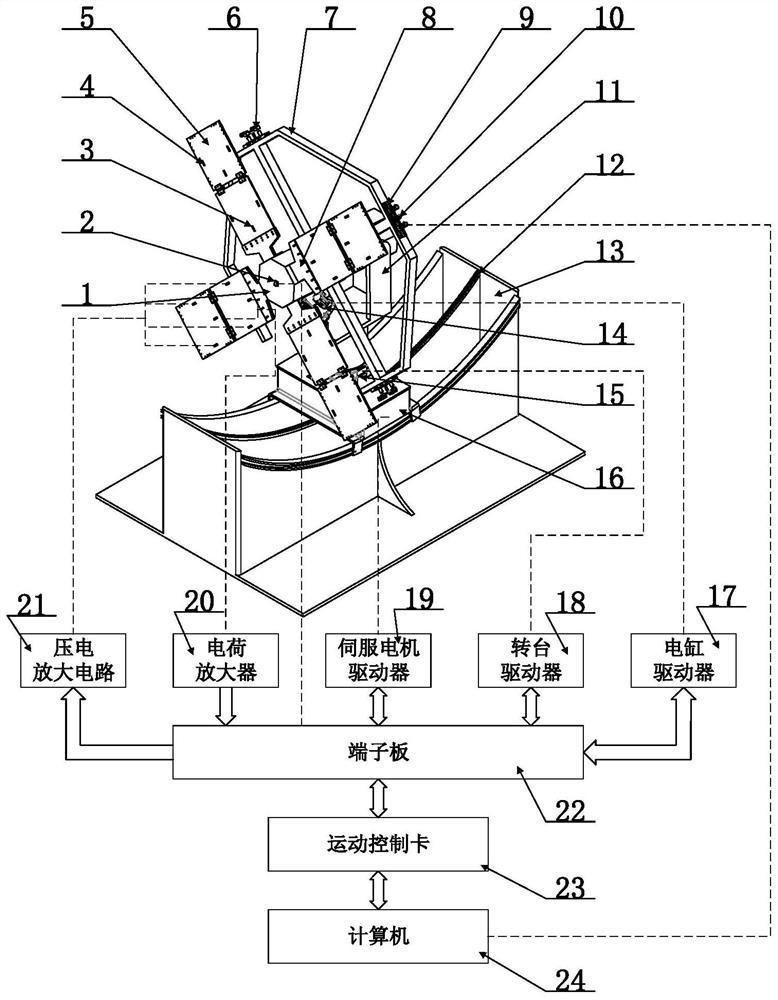
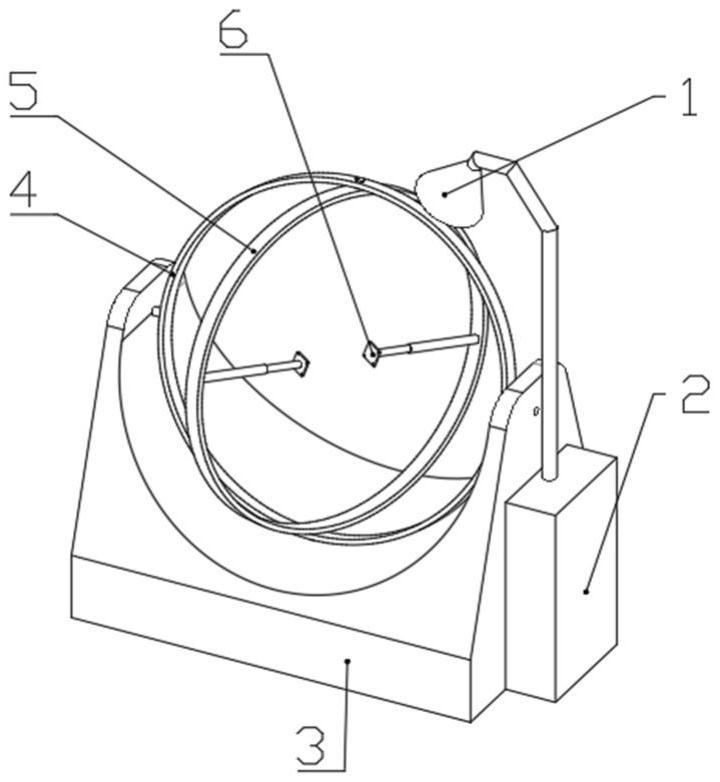
图1是本实用新型实施例的立体图;
图2是本实用新型实施例的主视图;
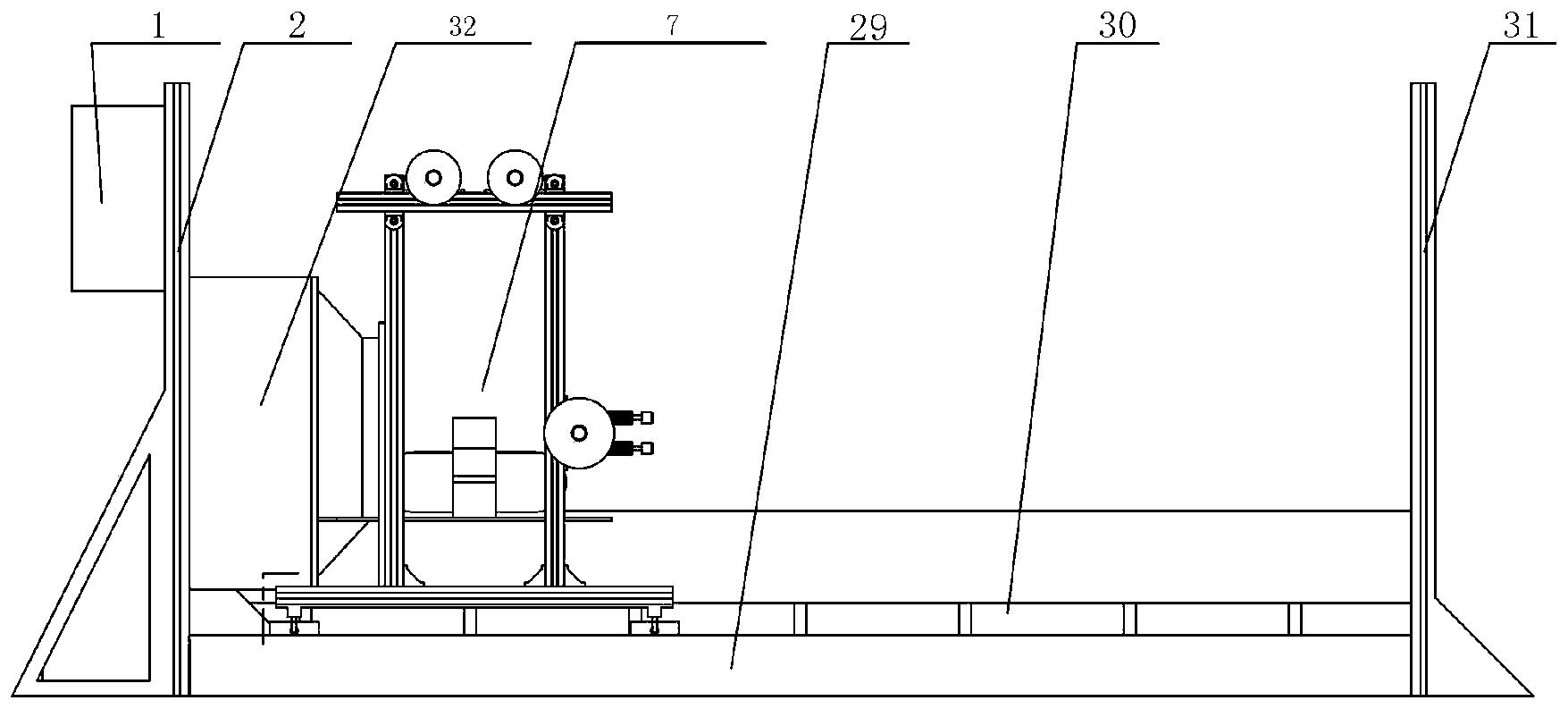
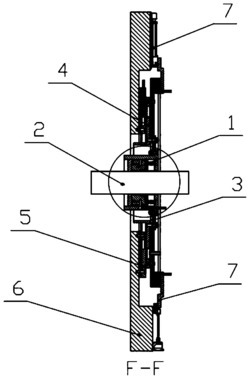
图3是本实用新型实施例的侧视图;
图4是本实用新型实施例的俯视图。
具体实施方式
为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。
基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
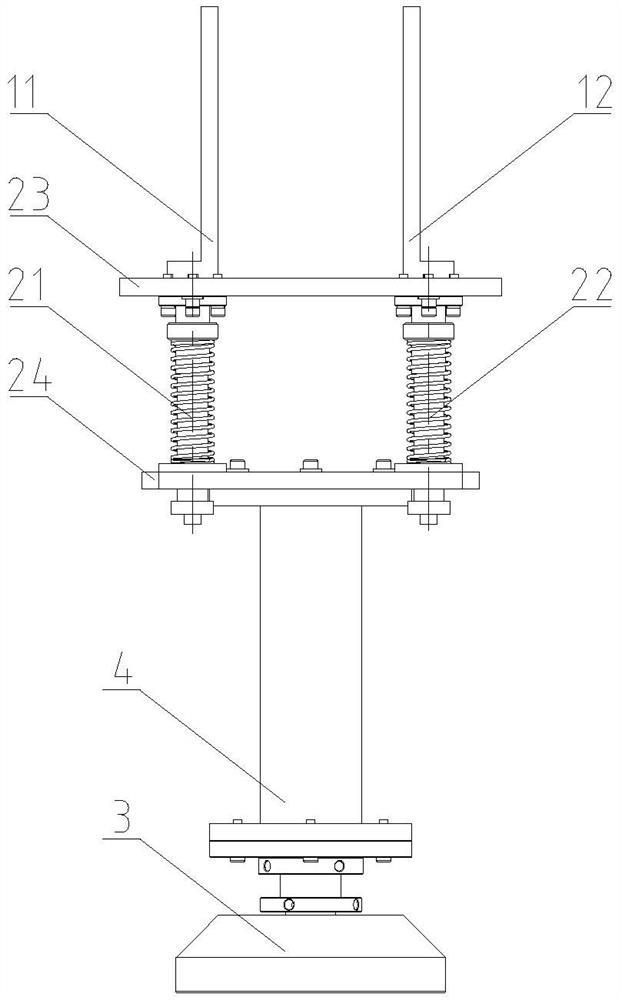
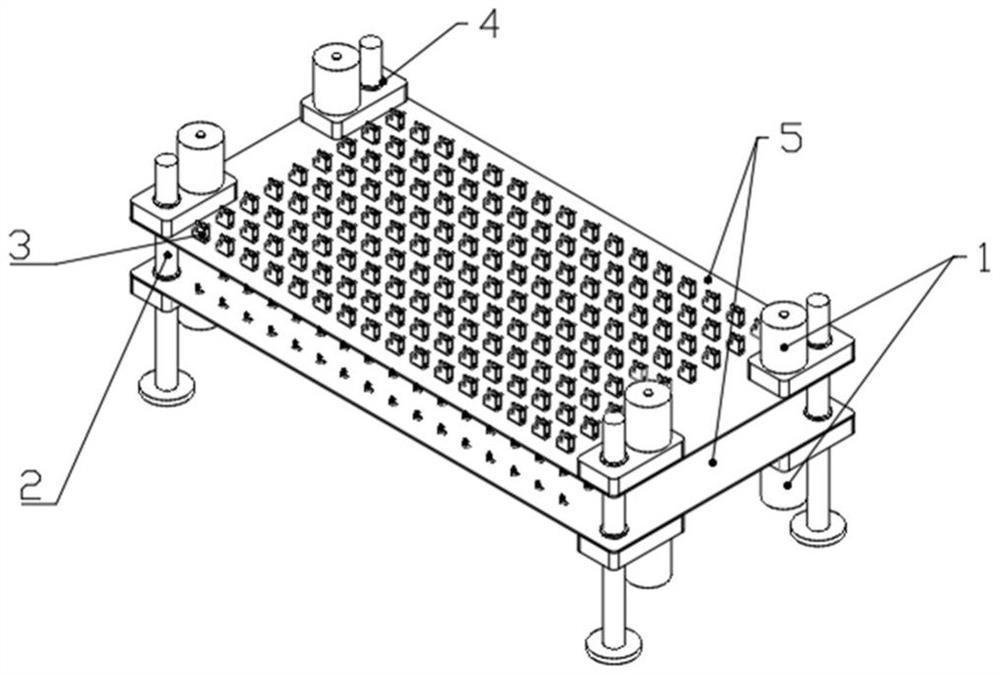
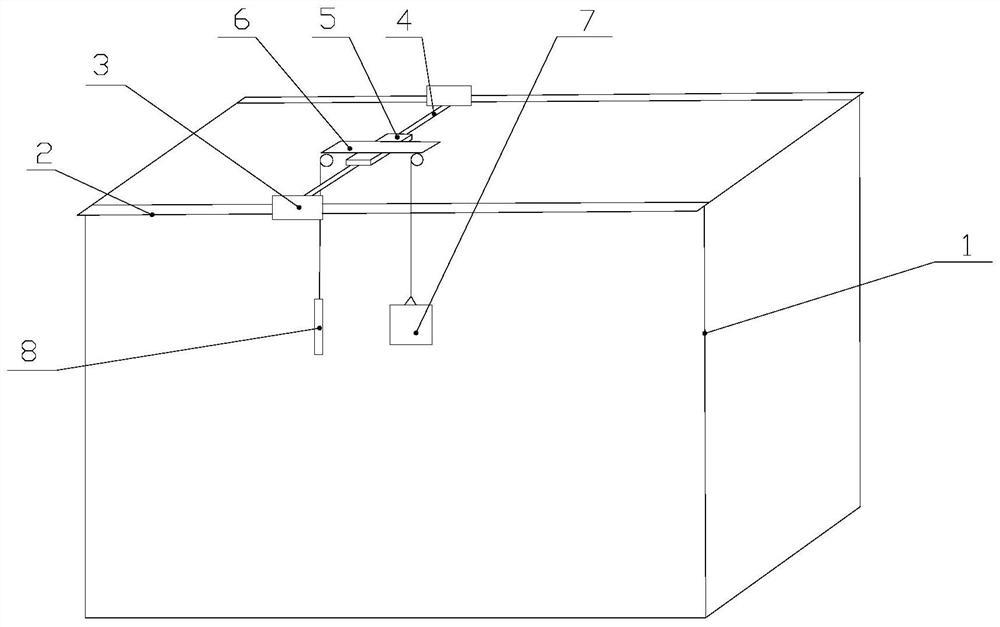
如图1至图4所示,本实用新型实施例所述空间机械臂地面微重力环境模拟装置,包括机械臂安装支架1、弹性组件2和单个平面气足3,所述机械臂安装支架1在所述弹性组件2的顶端设置,所述弹性组件2在所述单个平面气足3的顶端设置,所述机械臂安装支架1的中心和所述弹性组件2的中心在水平面内的投影重合设置,所述弹性组件2的中心和所述单个平面气足3的中心在水平面内的投影重合设置。
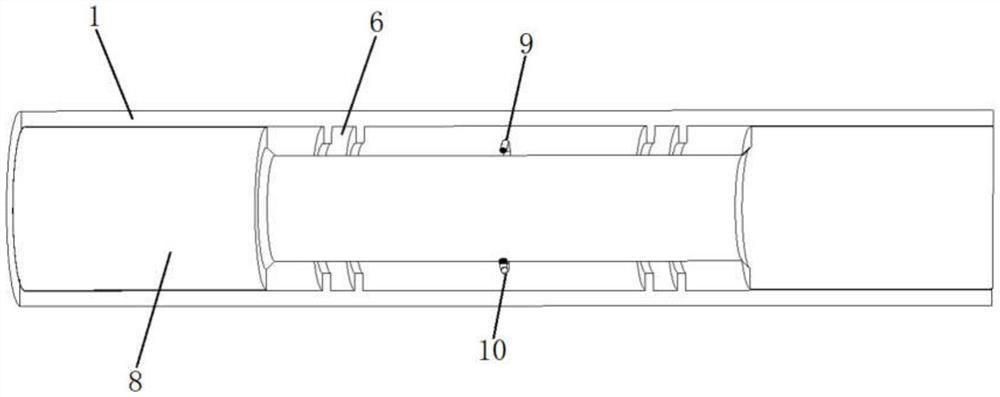
为了吸收空间机械臂在竖直方向的跳动,所述弹性组件2包括上安装板23、下安装板24、第一弹性件21和第二弹性件22,所述第一弹性件21的顶端和所述上安装板23连接、底端和所述下安装板24连接,所述第二弹性件22的顶端和所述上安装板23连接、底端和所述下安装板24连接。
所述第一弹性件21的上表面和所述上安装板23的下表面连接,所述第一弹性件21的下表面和所述下安装板24的上表面连接,所述第二弹性件22的上表面和所述上安装板23的下表面连接,所述第二弹性件22的下表面和所述下安装板24的上表面连接。
在本实施例中,所述第一弹性件21设置为套接有弹簧的伸缩杆。所述第一弹性件21的顶端不伸出所述上安装板23、底端不伸出下安装板24,所述第一弹性件21在吸收空间机械臂在在竖直方向的跳动过程,能够保持自身始终处在所述上安装板23和所述下安装板24之间,以避免和其他部件产生撞击或者摩擦。相应的,所述第一弹性件21和所述第二弹性件22的结构完全相同。
为了便于空间机械臂在水平方向保持平衡,所述第一弹性件21和所述第二弹性件22关于所述弹性组件2的中心对称设置,所述第一弹性件21沿竖直方向延伸,所述第二弹性件22沿竖直方向延伸。以便于所述第一弹性件21和所述第二弹性件22均匀受力,从而在空间机械臂的两侧对称的对空间机械臂进行支撑。
为了进一步保持空间机械臂在水平方向的平衡,所述机械臂安装支架1包括第一安装板11和第二安装板12,所述第一安装板11和所述第二安装板12在所述弹性组件2的顶端对称设置,所述第一安装板11沿竖直方向延伸,所述第二安装板12沿竖直方向延伸。
为了引导空间机械臂在水平方向的震动直接传递到所述第一弹性件21和所述第二弹性件22,所述第一安装板11和所述第一弹性件21在水平面内的投影重合设置,所述第二安装板12和所述第二弹性件22在水平面内的投影重合设置。
空间机械臂在竖直方向由于跳动而产生作用力,在竖直方向,空间机械臂两侧的作用力直接传递至所述第一弹性件21和所述第二弹性件22,能够避免作用力在水平方向产生分力,从而有效减少本实用新型实施例所述空间机械臂地面微重力环境模拟装置在水平方向的晃动。
为了更进一步的保持空间机械臂在水平方向的平衡,还包括中空设置的支撑立柱4,所述弹性组件2的底端和所述支撑立柱4的顶端连接,所述支撑立柱4的底端和所述单个平面气足3的顶端连接。所述弹性组件2的中心和所述支撑立柱4的中心在水平面内的投影重合设置,所述支撑立柱4的中心和所述单个平面气足3的中心在水平面内的投影重合设置。
空间机械臂在竖直方向由于跳动而产生作用力,在竖直方向,作用力沿弹性组件2传递至所述单个平面气足3的中心,能够避免作用力在水平方向产生分力,从而进一步减少本实用新型实施例所述空间机械臂地面微重力环境模拟装置在水平方向的晃动。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
空间机械臂地面微重力环境模拟装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0