









专利摘要
本发明涉及一种电机的控制方法及系统,属于电机控制技术领域。本发明在利用PI控制器控制电机的过程中,将电机的转速给定值、电机的实际转速以及前一次迭代学习控制器的输出量作为迭代学习控制器输入量,根据迭代学习控制器的输出量来调整PI控制器的参数,使得PI控制器的控制参数能够根据电机的实际转速和转速给定值进行适应性调整,更好地实现对电机的控制,且该调整方式实现简单,能够快速地完成PI控制器参数的调整,满足电机控制的实时性要求。
权利要求
1.一种电机的控制方法,其特征在于,该控制方法包括以下步骤:
获取电机的实际转速,将电机的实际转速与转速给定值之间的差值作为电机的转速误差,以所述转速误差为依据对电机进行PI控制,所述的PI控制过程中的PI参数采用迭代学习控制器的输出进行调整,公式为:
K
所述的迭代学习控制器为:
Δy
λ
2.根据权利要求1所述的电机的控制方法,其特征在于,迭代学习控制过程中输入误差值为电机的转速给定值和实际转速的差值。
3.根据权利要求1所述的电机的控制方法,其特征在于,迭代学习控制过程中输入误差值为参考模型的输出量与电机实际转速的差值,所述参考模型的输入为电机的转速给定值。
4.根据权利要求3所述的电机的控制方法,其特征在于,所述参考模型为:
y
y
5.一种电机的控制系统,其特征在于,该控制系统包括PI控制器和迭代学习控制器;
所述PI控制器用于根据电机的转速误差对电机进行PI控制,PI控制器的输入量为电机的转速误差,该转速误差等于电机的实时转速与转速给定值之间的差值;
所述迭代学习控制器用于根据电机的转速给定值和前一次迭代学习控制器的输出量对PI控制器的参数进行调整,采用的调整公式为:
K
所述的迭代学习控制器为:
Δy
λ
6.根据权利要求5所述的电机的控制系统,其特征在于,所述迭代学习控制器的输入误差值为电机的转速给定值和电机实际转速的差值。
7.根据权利要求5所述的电机的控制系统,其特征在于,所述控制系统还包括参考模型,所述参考模型的输入量为电机的转速给定值,参考模型的输出量与电机实际转速的差值为迭代学习控制器的输入误差值。
8.根据权利要求7所述的电机的控制系统,其特征在于,所述参考模型为:
y
y
说明书
技术领域
本发明涉及一种电机的控制方法及系统,属于电机控制技术领域。
背景技术
超声波电机在汽车电子、精密仪器、机器人以及航天航空等领域有着广阔的应用前景。因PI控制器结构简单、工程设计方法成熟,固定参数的PI控制器应用广泛(这里,“固定参数”是指PI控制器的两个控制参数,比例系数KP和积分系数KI固定不变)。采用PI控制器对超声波电机进行控制成为了研究热门,但超声波电机作为复杂被控对象和时变对象,固定参数PI控制器难以对超声波电机实现良好的控制性能。由此,PI控制器参数的在线调整方法被广泛研究,目前给出在线自动调整控制PI控制器参数的方法主要有两类,一类是基于专家系统,另一类是基于模糊逻辑的方法。上述两种方式虽然都能实现PI控制器参数的调整,但是过程复杂,影响超声波电机控制的实时性。
发明内容
本发明的目的是提供一种电机的控制方法及系统,以解决目前采用PI控制器进行电机控制过程中存在PI参数调整复杂、影响电机控制的实时性。
本发明为解决上述技术问题而提供一种电机的控制方法,该控制方法包括以下步骤:
获取电机的实际转速,将电机的实际转速与转速给定值之间的差值作为电机的转速误差,以所述转速误差为依据对电机进行PI控制,所述的PI控制过程中的PI参数采用迭代学习控制器的输出进行调整,公式为:
KP(i)、KI(i)分别为i时刻调整后的比例系数、积分系数;KP0、KI0分别为PI控制中的比例系数、积分系数的初始值,Δyrk(i)为为第k次迭代控制过程中i时刻的迭代学习控制器输出量,ek(i)为第k次迭代控制过程中i时刻的转速误差,迭代学习控制器的输入量与电机的转速给定值、前一次迭代学习控制器的输出量和电机的实际转速有关。
本发明在利用PI控制器控制电机的过程中,将电机的转速给定值、电机的实际转速以及前一次迭代学习控制器的输出量作为迭代学习控制器输入量,根据迭代学习控制器的输出量来调整PI控制器的参数,使得PI控制器的控制参数能够根据电机的实际转速和转速给定值进行适应性调整,更好地实现对电机的控制,且该调整方式实现简单,能够快速地完成PI控制器参数的调整,满足电机控制的实时性要求。
为进一步地降低参数调整的复杂性,所述的迭代学习控制器为:
Δyrk(i)=Δyr(k-1)(i)+λPem(k-1)(i+1)+λD(em(k-1)(i+1)-em(k-1)(i))
λP为比例学习增益;λD为微分学习增益;Δyr(k-1)(i)为第k-1次迭代控制过程中i时刻的迭代学习控制器输出值,em(k-1)(i+1)和em(k-1)(i)分别为第k-1次迭代控制过程中i+1时刻、i时刻的输入误差值,该输入误差值与电机的转速给定值和实际转速有关,Δyrk(i)为第k次迭代控制过程中i时刻的迭代学习控制器输出量。
进一步地,迭代学习控制过程中输入误差值为电机的转速给定值和实际转速的差值。
进一步地,为限制电机转速在起始阶段的响应速度,迭代学习控制过程中输入误差值为参考模型的输出量与电机实际转速的差值,所述参考模型的输入为电机的转速给定值。
进一步地,为快速实现迭代控制器的收敛,所述参考模型为:
ymk(i)=(1-β
yrk(i)为第k次迭代控制过程中i时刻的转速给定值,即为参考模型的输入量;ymk(i)为参考模型的输出;β为常数,0<β<1,β值越大,参考模型输出信号的变化越平缓。
本发明还提供了一种电机的控制系统,该控制系统包括PI控制器和迭代学习控制器;
所述PI控制器用于根据电机的转速误差对电机进行PI控制,PI控制器的输入量为电机的转速误差,该转速误差等于电机的实时转速与转速给定值之间的差值;
所述迭代学习控制器用于根据电机的转速给定值和前一次迭代学习控制器的输出量对PI控制器的参数进行调整,采用的调整公式为:
KP(i)、KI(i)分别为i时刻调整后的比例系数、积分系数;KP0、KI0分别为PI控制中的比例系数、积分系数的初始值,Δyrk(i)为为第k次迭代控制过程中i时刻的迭代学习控制器输出量,ek(i)为第k次迭代控制过程中i时刻的转速误差,迭代学习控制器的输入量与电机的转速给定值、前一次迭代学习控制器的输出量和电机的实际转速有关。
本发明在利用PI控制器控制电机的过程中,将电机的转速给定值、电机的实际转速以及前一次迭代学习控制器的输出量作为迭代学习控制器输入量,根据迭代学习控制器的输出量来调整PI控制器的参数,使得PI控制器的控制参数能够根据电机的实际转速和转速给定值进行适应性调整,更好地实现对电机的控制,且该调整方式实现简单,能够快速地完成PI控制器参数的调整,满足电机控制的实时性要求。
为进一步地降低参数调整的复杂性,所述的迭代学习控制器为:
Δyrk(i)=Δyr(k-1)(i)+λPem(k-1)(i+1)+λD(em(k-1)(i+1)-em(k-1)(i))
λP为比例学习增益;λD为微分学习增益;Δyr(k-1)(i)为第k-1次迭代控制过程中i时刻的迭代学习控制器输出值,em(k-1)(i+1)和em(k-1)(i)分别为第k-1次迭代控制过程中i+1时刻、i时刻的迭代控制器的输入误差值,该输入误差值与电机的转速给定值和实际转速有关,Δyrk(i)为第k次迭代控制过程中i时刻的迭代学习控制器输出量。
进一步地,所述迭代学习控制器的输入误差值为电机的转速给定值和电机实际转速的差值。
进一步地,为限制电机转速在起始阶段的响应速度,所述控制系统还包括参考模型,所述参考模型的输入量为电机的转速给定值,参考模型的输出量与电机实际转速的差值为迭代学习控制器的输入误差值。
进一步地,为快速实现迭代控制器的收敛,所述参考模型为:
ymk(i)=(1-β
yrk(i)为第k次迭代控制过程中i时刻的转速给定值,即为参考模型的输入量;ymk(i)为参考模型的输出;β为常数,0<β<1,β值越大,参考模型输出信号的变化越平缓。
附图说明
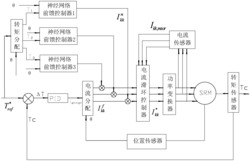
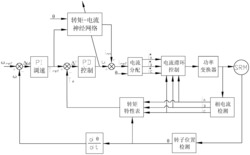
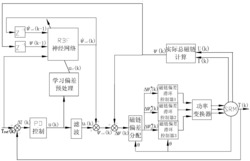
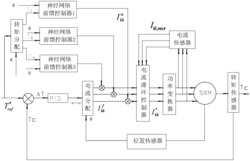
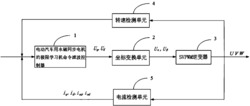
图1是本发明超声波电机控制系统的结构框图;
图2-a是本发明实施例中转速阶跃响应曲线示意图;
图2-b是本发明实施例中PI控制器KP值的变化曲线图;
图2-c是本发明实施例中PI控制器KP值的变化曲线图。
具体实施方式
下面结合附图对本发明的具体实施方式作进一步地说明。
控制系统的实施例
本发明的电机控制系统能够适用于各种类型的电机,下面以超声波电机为例对本发明的电机控制系统进行详细说明,针对超声波电机,对应的超声波电机控制系统如图1所示,该系统为超声波电机的转速闭环控制系统,电机转速的闭环控制器为PI控制器,超声波电机及其驱动电路共同构成PI控制器的被控对象,参考模型和迭代学习控制器用于对PI控制器的参数进行调整,其中,yrk(i)、Δyrk(i)、yk(i)、ek(i)、ymk(i)、emk(i)分别为第k次迭代控制过程中i时刻的转速给定值、迭代学习控制器输出量、转速、转速误差、参考模型输出量、参考模型误差,且有:
ek(i)=yrk(i)-yk(i) (1)
emk(i)=ymk(i)-yk(i)(2)
在离散采样的数字控制情况下,图1中的PI控制器可写为:
式中,KP为比例系数,KI为积分系数。
在数字控制系统中,PI控制器的具体实现形式也可以是如下增量形式
uk(i)=uk(i-1)+KP(ek(i)-ek(i-1))+KIek(i)(4)
式中,uk(i-1)为第k次迭代控制过程中i-1时刻的控制量。
迭代学习控制器并不是对所有形式的给定信号都能达到理想的收敛状态。例如,考虑到实际系统必然存在的惯性,电机转速不可能完全跟踪阶跃给定信号,即一次阶跃响应过程中的转速跟踪误差不可能始终为0。而且在电机运动控制系统中,为将作为电机负载的机械部件受到的冲击限制在合适范围内,有时还需要人为限制电机转速在起始阶段的响应速度。也就是说,由于系统固有惯性的限制,对阶跃给定信号的完全跟踪是不可能的,通常也是不必要的,实际应用中期望达到的控制状态并不是完全跟踪。于是,本发明利用参考模型来反映期望的响应过程,并使迭代学习控制器的收敛状态成为可能。这里的参考模型设计为:
ymk(i)=(1-β
式中,ymk(i)为参考模型的输出;β为常数,0<β<1。β值越大,参考模型输出信号的变化越平缓。这里,可以取β=0.5,对应的阶跃响应曲线无超调,调节时间约为0.1s。ymk(i)减去电机转速的反馈值,得到式(2)所示参考模型误差emk(i)作为迭代学习控制器的一个输入信号。
作为其他实施方式,本发明的控制系统中也可以没有参考模型,直接将电机转速给定值和电机实际转速的差值作为迭代学习控制器的一个输入量。
迭代学习控制器可采用P型迭代学习控制器、改进P型迭代学习控制器等,本实施例为进一步降低控制的复杂度,采用的迭代学习控制器为:
Δyrk(i)=Δyr(k-1)(i)+λPem(k-1)(i+1)+λD(em(k-1)(i+1)-em(k-1)(i))(6)
式中,系数λP为比例学习增益;λD为微分学习增益;Δyr(k-1)(i)为第k-1次迭代控制过程中i时刻的迭代学习控制器输出值,em(k-1)(i+1)和em(k-1)(i)分别为第k-1次迭代控制过程中i+1时刻、i时刻迭代学习控制器的输入误差值(即参考误差)。
在正常的控制过程中,随着迭代学习过程的进行,控制性能逐步改善,误差em(k-1)(i)随着迭代次数的增加不断减小。当em(k-1)(i)、em(k-1)(i+1)减小到趋于0时,Δyrk(i)不再变化,迭代学习控制过程达到收敛状态。
这里,误差微分项的加入,使得迭代学习控制器能够在前次误差不为0、但正以合理速度趋于0的时候,保持当前的输出不变,就是说,使PI控制器的控制参数的新增量为0。
图1中的虚线表示前次(即第k-1次)迭代控制过程的误差、给定值增量等信息被存入存储器,用做当前控制过程(k次)中的迭代学习控制器计算,如式(6)所示。式(6)所示迭代学习控制器的输出Δyrk(i)被用来实时调节KP、KI为值,调节公式为
式中,KP(i)、KI(i)为比例系数、积分系数的当前值(i时刻);KP0、KI0为比例系数、积分系数的初始值,即起始时刻“固定参数PI控制器”的参数值。
上述本实施例中采用PI控制器参数的在线自适应调整方式既适用于绝对形式的PI控制器式(3),也适用于增量形式的PI控制器式(4)。
方法实施例
本发明的控制方法首先获取超声波电机的实际转速,将超声波电机的实际转速与转速给定值之间的差值作为超声波电机的转速误差,以所述转速误差为依据对超声波电机进行PI控制,其中PI控制过程中的PI参数采用迭代学习控制器的输出进行调整。具体的控制过程已在控制系统的实施例中进行了详细说明,这里不再赘述。
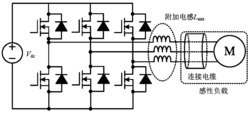
为验证本发明的有效性,下面通过实验进行验证。实验用电机为Shinsei USR60型行波超声波电机,驱动电路为两相H桥结构,采用相移PWM控制方式,控制系统中的PI控制器、参考模型和迭代学习控制器可由DSP芯片编程实现,PI控制器的参数初值为:比例系数KP=1、积分系数KI=2。迭代学习控制器的比例学习增益λP=1、微分学习增益λD=2,设置转速阶跃给定值yrk=30r/min,连续进行6次迭代学习控制实验,得转速响应曲线如图2-a所示,图2-b和图2-c给出了KP、KI控制过程中自适应调整的变化曲线。
从图2-b和图2-c中可以看出,随着一次次迭代学习过程的进行,KP、KI持续被自动调整,使得电机转速的控制性能越来越好,响应速度越来越快,且无超调。这表明,本发明通过迭代学习自适应调整PI控制参数是有效的。
一种电机的控制方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0