








专利摘要
本实用新型公开了一种高速大视野显微成像装置,其特征在于,包括光源系统、显微成像系统、光束偏转系统、光电传感器系统和控制系统;控制系统,分别与光源系统、光束偏转系统和光电传感器系统连接,用于对光源系统、光束偏转系统、光电传感器系统进行同步有序控制;光源系统的输出光路上放置样品,样品的输出光路设有显微成像系统,显微成像系统的输出光路上设有光束偏转系统,光束偏转系统的输出光路上设有光电传感器系统,光电传感器系统包括至少两个光电传感器,每个光电传感器的感光面包括多个子区域。本实用新型涉及显微成像技术领域,解决了传统装置中进行高速成像时存在的曝光时间不一致,图像尺寸受到限制的问题。
权利要求
1.一种高速大视野显微成像装置,其特征在于,包括光源系统、显微成像系统、光束偏转系统、光电传感器系统和控制系统;
控制系统,分别与光源系统、光束偏转系统和光电传感器系统连接,用于对光源系统、光束偏转系统、光电传感器系统进行同步有序控制;
光源系统的输出光路上放置样品,样品的输出光路设有显微成像系统,显微成像系统的输出光路上设有光束偏转系统,光束偏转系统的输出光路上设有光电传感器系统,光电传感器系统包括至少两个光电传感器,每个光电传感器的感光面包括多个子区域;
其中,光源系统发出的光照射到样品上,显微成像系统接收和汇聚样品发出的光信号,并将所述光信号输出给光束偏转系统,光束偏转系统依次将光信号偏转到光电传感器系统的各个光电传感器的感光面上,光电传感器系统中的各个光电传感器用于交替进行光信号的积分以及信号转换。
2.根据权利要求1所述的高速大视野显微成像装置,其特征在于,所述光源系统包括光源和透镜,光源发出的光经透镜汇聚后输出。
3.根据权利要求1所述的高速大视野显微成像装置,其特征在于,所述显微成像系统按照光路传播方向依次设置显微物镜、二向色镜、第一聚焦透镜、反射镜、光阑和第二聚焦透镜,所述二向色镜的反射面朝向显微物镜,所述二向色镜的透射面朝向第一聚焦透镜,所述光源系统输出的光经二向色镜反射到显微物镜从而照射到样品上,样品发射出光信号,依次经过显微物镜和二向色镜,从二向色镜透射的光信号依次经过第一聚焦透镜和反射镜,从发射镜反射的光信号依次经过光阑和第二聚焦透镜。
4.根据权利要求1所述的高速大视野显微成像装置,其特征在于,光束偏转系统包括光偏转器和第三聚焦透镜,控制系统控制光偏转器偏转不同的角度,使得从所述显微成像系统输出的光信号经第三聚焦透镜后依次聚焦到每个光电传感器及每个光电传感器的不同子区域。
5.根据权利要求4所述的高速大视野显微成像装置,其特征在于,所述光偏转器为检流计振镜、压电谐振振镜和多面转镜中的任一个。
6.根据权利要求5所述的高速大视野显微成像装置,其特征在于,所述光偏转器为检流计振镜时,所述光束偏转系统还包括三角分光镜,所述至少两个光电传感器包括第一光电传感器和第二光电传感器,所述光束偏转系统按照光路传播方向依次设置检流计振镜、第三聚焦透镜和三角分光镜,从所述显微成像系统输出的光信号依次经过检流计针镜、第三聚焦透镜和三角分光镜,经三角分光镜分光聚焦在第一光电传感器和第二光电传感器。
7.根据权利要求6所述的高速大视野显微成像装置,其特征在于,第一光电传感器和第二光电传感器对称设置于三角分光镜的两侧。
8.根据权利要求1所述的高速大视野显微成像装置,其特征在于,每个光电传感器均包括SCMOS器件。
9.根据权利要求1所述的高速大视野显微成像装置,其特征在于,所述多个子区域为4个子区域。
说明书
技术领域
本实用新型涉及显微成像技术领域,尤其涉及一种高速大视野显微成像装置。
背景技术
光学成像领域的一个发展方向就是如何能够捕捉到高速的生物学过程,能够实现更高的成像速度,就可以捕捉到高速生物学过程的细节,可以为进一步的生物学研究提供基础。
光学信号的采集主要是由光电转换器件完成的,常用的光电转换器件包括光电倍增管(PMT),电荷耦合器件(CCD)以及金属互补氧化物半导体(CMOS)等技术。而高速成像主要涉及到的传感器为CCD和CMOS器件。随着近年来光电子器件的发展,尤其是科研级高速低噪声相机(sCMOS)的出现,使得光电传感器能够达到更高的帧频,全幅的图像采集速度能够达到100fps,通过调整图像大小(ROI)还可以进一步增加帧速,从而满足了大部分的生物学研究的需求。
但是,对于一些超快的生物学过程来说,例如膜电位的动态过程研究,往往需要达到接近1ms的时间分辨率,这时即使使用高速sCMOS也只能将ROI限制在很小的范围之内,通常只能达到100-200像素的高度,这就限制了对大范围信号的采集和分析工作。
同时,使用sCMOS直接进行高速成像时,受限于sCMOS的结构,通常使用卷帘快门(Rollingshutter)方式,这种方式能够实现更高的成像速度,但是图像中每一行的曝光时间存在差别,这对于需要对时间进行分析的场合会造成误差导致分析困难并增加误差。
实用新型内容
本实用新型提供一种高速大视野显微成像装置,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
第一方面,本实用新型实施例提供了一种高速大视野显微成像装置,其特征在于,包括光源系统、显微成像系统、光束偏转系统、光电传感器系统和控制系统;
控制系统,分别与光源系统、光束偏转系统和光电传感器系统连接,用于对光源系统、光束偏转系统、光电传感器系统进行同步有序控制;
控制系统,分别与光源系统、光束偏转系统和光电传感器系统连接,用于对光源系统、光束偏转系统、光电传感器系统进行同步有序控制;
光源系统的输出光路上放置样品,样品的输出光路设有显微成像系统,显微成像系统的输出光路上设有光束偏转系统,光束偏转系统的输出光路上设有光电传感器系统,光电传感器系统包括至少两个光电传感器,每个光电传感器的感光面包括多个子区域;
其中,光源系统发出的光照射到样品上,显微成像系统接收和汇聚样品发出的光信号,并将所述光信号输出给光束偏转系统,光束偏转系统依次将光信号偏转到光电传感器系统的各个光电传感器的感光面上,光电传感器系统中的各个光电传感器用于交替进行光信号的积分以及信号转换。
进一步,所述光源系统包括光源和透镜,光源发出的光经透镜汇聚后输出。
进一步,所述显微成像系统按照光路传播方向依次设置显微物镜、二向色镜、第一聚焦透镜、反射镜、光阑和第二聚焦透镜,所述二向色镜的反射面朝向显微物镜,所述二向色镜的透射面朝向第一聚焦透镜,所述光源系统输出的光经二向色镜反射到显微物镜从而照射到样品上,样品发射出光信号,依次经过显微物镜和二向色镜,从二向色镜透射的光信号依次经过第一聚焦透镜和反射镜,从发射镜反射的光信号依次经过光阑和第二聚焦透镜。
进一步,光束偏转系统包括光偏转器和第三聚焦透镜,控制系统控制光偏转器偏转不同的角度,使得从所述显微成像系统输出的光信号经第三聚焦透镜后依次聚焦到每个光电传感器及每个光电传感器的不同子区域。
进一步地,所述光偏转器为检流计振镜、压电谐振振镜和多面转镜中的任一个。
进一步,所述光偏转器为检流计振镜时,所述光束偏转系统还包括三角分光镜,所述至少两个光电传感器包括第一光电传感器和第二光电传感器,所述光束偏转系统按照光路传播方向依次设置检流计振镜、第三聚焦透镜和三角分光镜,从所述显微成像系统输出的光信号依次经过检流计针镜、第三聚焦透镜和三角分光镜,经三角分光镜分光聚焦在第一光电传感器和第二光电传感器。
进一步,第一光电传感器和第二光电传感器对称设置于三角分光镜的两侧。
进一步,每个光电传感器均包括SCMOS器件。
进一步,所述多个子区域为4个子区域。
本实用新型实施例的一种高速大视野显微成像装置,至少具有以下有益效果:
1、本装置解决了传统显微成像装置在高速成像时需要减小成像尺寸的问题,在高速成像过程中能够提供更大的成像尺寸;
2、本装置解决了曝光时间不一致的问题,保证了图像中每行的曝光时间的同步。
3.本装置通过使用多个光电传感器,能够使光电传感器的光信号积分和积分信号读出两个过程相分离,保证图像曝光的同步,同时也可以增加图像的采集速度。
附图说明
附图用来提供对本实用新型技术方案的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型的技术方案,并不构成对本实用新型技术方案的限制。
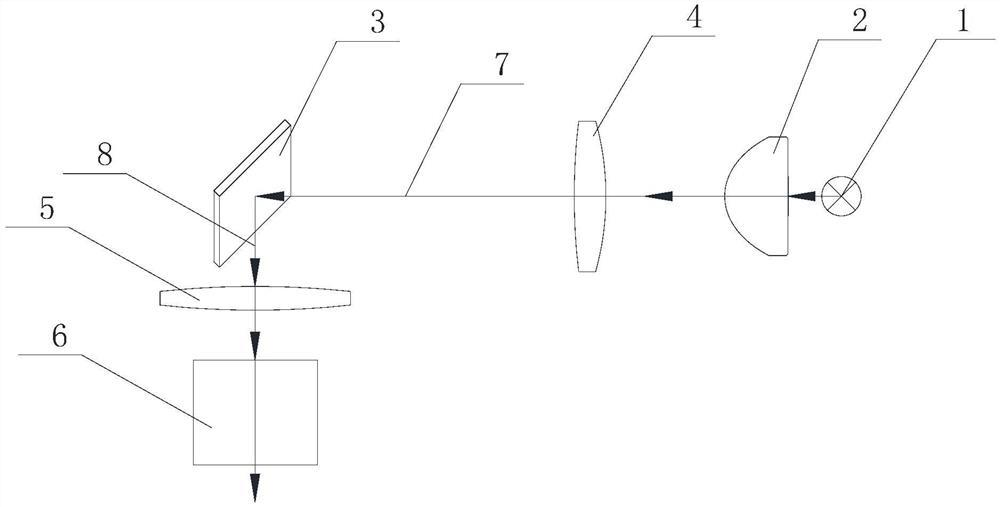
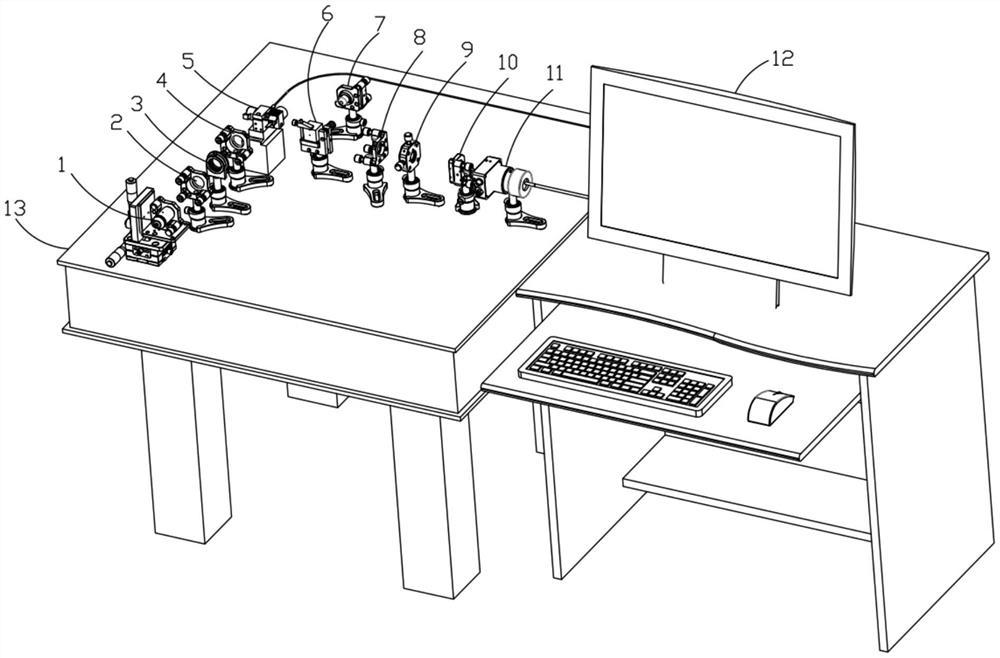
图1为本实用新型实施例提供的一种高速大视野显微成像装置的结构示意图;
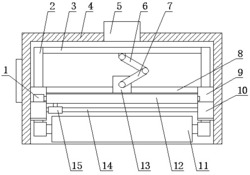
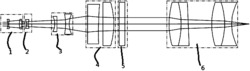
图2为本实用新型另一实施例提供的一种高速大视野显微成像装置的结构示意图;
图3为本实用新型实施例提供的一种高速大视野显微成像装置的成像时的时序图;
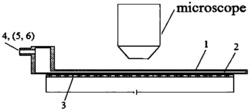
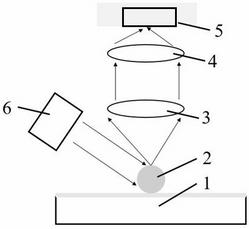
图4为本实用新型实施例提供的一种高速大视野显微成像装置的CMOS靶面及子图像示意图。
附图标记说明:1-光源系统;2-样品;3-显微成像系统;4-光束偏转系统;5-光电传感器系统;6-控制系统;1-1-激光器;1-2-透镜;3-1-显微物镜;3-2-二向色镜;3-3-第一聚焦透镜;3-4-反射镜;3-5-光阑;3-6-第二聚焦透镜;4-1-检流计振镜;4-2-第三聚焦透镜;4-3-三角分光镜;5-1-第一光电传感器;5-2-第二光电传感器。
具体实施方式
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
需要说明的是,虽然在系统示意图中进行了功能模块划分,但是在某些情况下,可以以不同于系统中的模块划分,或流程图中的顺序执行所示出或描述的步骤。说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
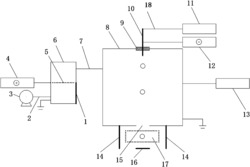
图1提供了一种高速大视野显微成像装置,包括光源系统1、显微成像系统3、光束偏转系统4、光电传感器系统5和控制系统6;
控制系统6,分别与光源系统1、光束偏转系统4和光电传感器系统5连接,用于对光源系统1、光束偏转系统4、光电传感器系统5进行同步有序控制;光源系统1的输出光路上放置样品2,样品2的输出光路设有显微成像系统3,显微成像系统3的输出光路上设有光束偏转系统4,光束偏转系统4的输出光路上设有光电传感器系统5,光电传感器系统5包括至少两个光电传感器,每个光电传感器的感光面包括多个子区域;其中,光源系统1发出的光照射到样品2上,显微成像系统3接收和汇聚样品2发出的光信号,并将所述光信号输出给光束偏转系统4,光束偏转系统4依次将光信号偏转到光电传感器系统5的各个光电传感器的感光面上,光电传感器系统5中的各个光电传感器用于交替进行光信号的积分以及信号转换。
具体地,光源系统1,用于提供显微成像所需要的光源;光源系统1用于提供激发荧光或者明场照明等显微成像所需要的光源,样品2放置在光源所在的光路上,使得光源照射到样品2上,可以对样品2进行激发使得样品2发出光信号或者明场照明对样品2进行照射使得样品2发出反射的光信号。
在一实施例中,光源系统1包括光源和透镜,光源发出的光经透镜汇聚后输出。所述光源可以是照明光源,或者激光光源,或者用于激发荧光或者明场照明等光源都可,例如可以是LED灯、汞灯、卤素灯等,也可以是激光器,例如脉冲激光器。
显微成像系统3,用于接收和汇聚样品2发出的光信号;光束偏转系统4,用于接收显微成像系统3输出的光信号,并控制所述光信号汇聚的位置在光电传感器系统5中不同的光电传感器以及传感器感光面上不同子区域之间切换,即光束偏转系统4控制样品发出的光信号汇聚到不同的光电传感器以及光电传感器的不同位置。
光电传感器系统5,包括至少两个光电传感器,每个光电传感器的感光面包括N个子区域,两个位置之间的切换时间小于等于系统所需的时间分辨率,各个传感器用于交替进行光信号的积分以及信号转换,即光信号汇聚的位置所在的光电传感器对光信号进行积分,未进行光信号积分的光电传感器进行信号的转换和传输,信号转换后得到各个光电传感器上N个子区域的图像的数字化数据,并将所述数字化数据传输至控制系统6,其中,N≥2。
控制系统6,用于对光源系统1、光束偏转系统4、光电传感器系统5进行同步有序控制,以及根据每个光电传感器的N个子区域的图像的数字化数据得到整个视场范围内完整时间序列的图像,从而实现超快拍摄速度下的曝光时间同步以及更大的成像尺寸。
图1中高速大视野显微成像装置的工作方法包括:
S21、打开光源系统,光源系统发出的光照射在样品上,样品发射出光信号,显微成像系统收集光信号;
S22、控制系统控制光束偏转系统偏转,使得光信号按顺序分别汇聚在M个光电传感器中的每一个,并且当光信号汇聚到第i个光电传感器时,控制系统控制光信号依次汇聚在第i个光电传感器的区域1至区域N,第i个光电传感器对光信号进行积分,其中1≤i≤M,M≥2;
S23、在第i个光电传感器对光信号进行积分的过程中,未进行光信号积分的第j个光电传感器对其已经积分的光信号进行转换,得到第j个光电传感器上N个子区域的图像的数字化数据,并将所述数字化数据传输至控制系统,其中1≤j≤M,并且j≠i;
S24、控制系统根据每个光电传感器的N个子区域的图像的数字化数据得到整个视场范围内完整时间序列的图像。
在一实施例中,在光源系统在光束偏转系统的指向稳定时打开,在不同位置之间切换过程中关闭。
在一实施例中,光束偏转系统包括光偏转器,控制系统控制光偏转器偏转不同的角度,使得输出的光信号依次聚焦到每个光电传感器及每个光电传感器的不同子区域。具体地,控制系统根据光电传感器的数量控制光偏转器旋转不同的角度使得光信号被第一个光电传感器、第二个光电传感器...第M个光电传感器进行采集。
光束偏转系统还包括聚焦透镜,光偏转器输出的光信号经聚焦透镜后依次聚焦到每个光电传感器及每个光电传感器的不同子区域。
所述光偏转器为检流计振镜、压电谐振振镜和多面转镜中的任一个,或者其他可以使光进行偏转的器件。本领域技术人员可以根据实际需要设定。
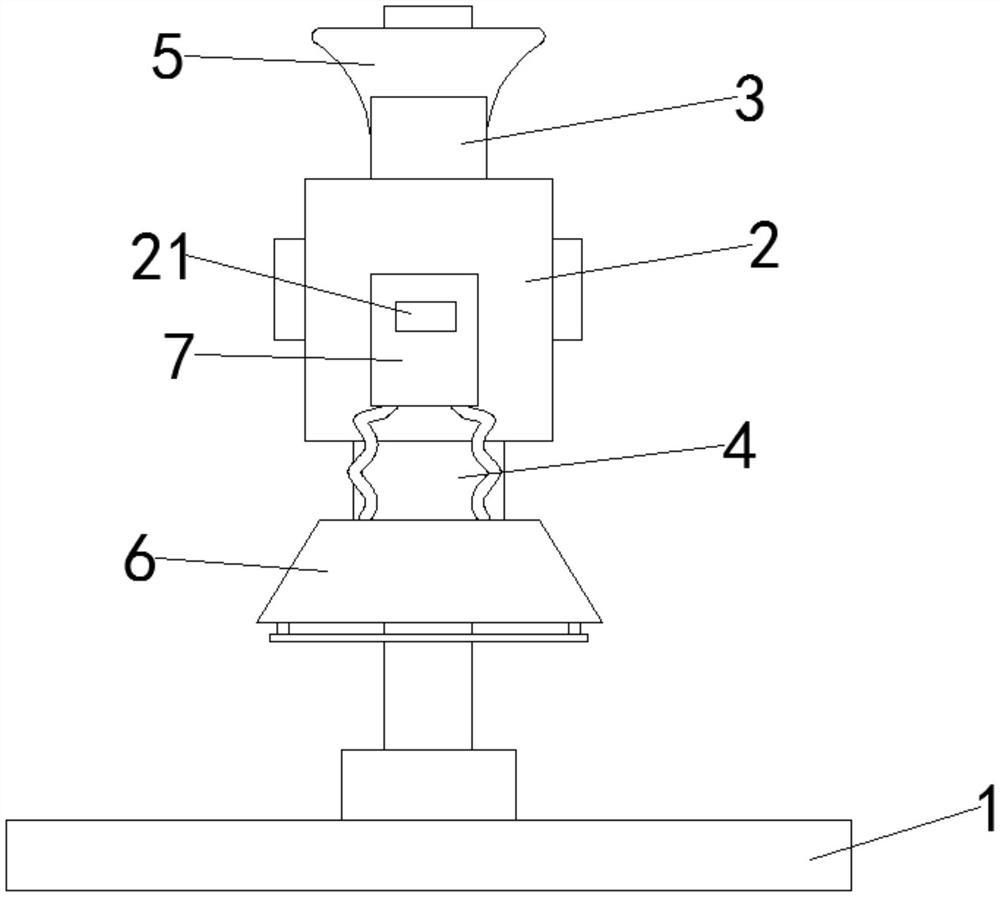
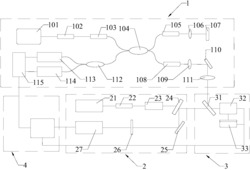
图2提供了一种高速大视野显微成像装置的具体结构示意图。光源系统1包括激光器1-1和透镜1-2;显微成像系统3包括显微物镜3-1、二向色镜3-2、第一聚焦透镜3-3、反射镜3-4、光阑3-5和第二聚焦透镜3-6;光束偏转系统4包括检流计振镜、压电谐振振镜、多面转镜等可以使光束发生快速偏转的装置。在图2中,光束偏转系统4包括检流计振镜4-1;另外光束偏转系统4还包括第三聚焦透镜4-2和三角分光镜4-3。
传感器数量以及每个传感器上子图像数量可以根据实际需要而设置,在图2中的实施例中,光电传感器系统5包括两个光电传感器,分别为第一光电传感器5-1和第二光电传感器5-2,每个光电传感器靶面上设置4个子图像。第一光电传感器5-1和第二光电传感器5-2均包括SCMOS器件。
如图2所示,二向色镜3-2的反射面朝向显微物镜3-1,二向色镜3-2的透射面朝向第一聚焦透镜3-3,激光器1-1的光路上依次设置透镜1-2和二向色镜3-2,二向色镜3-2以一定的角度设置使得激光束以一定的入射角度入射到二向色镜3-2,显微物镜3-1和样品2设置在二向色镜3-2的反射光路上,使得激光器发出的光经过透镜1-2汇聚后输出,从透镜1-2输出的光经二向色镜3-2反射到显微物镜3-1从而照射到样品2上,样品2发射出光信号,依次经过显微物镜3-1和二向色镜3-2,从二向色镜3-2透射出光信号,二向色镜3-2透射光路上依次设置第一聚焦透镜3-3和反射镜3-4,反射镜3-4的反射光路依次设置光阑3-5、第二聚焦透镜3-6和检流计振镜4-1;检流计振镜4-1的偏转光路依次设置有第三聚焦透镜4-2和三角分光镜4-3,第一光电传感器5-1和第二光电传感器5-2对称地设置在三角分光镜4-3两侧,使得第一光电传感器5-1和第二光电传感器5-2能够对样品2的发出的光信号进行采集。
在一实施例中,二向色镜3-2以一定的角度设置使得激光束以一定的入射角度入射到二向色镜3-2,该入射角度可以是大于等于45°,在一实施例中可以取值为45°。
图2的高速大视野显微成像装置工作原理结合图3的时序图分析如下:
检流计振镜4-1的Y振镜的电压为电压1时,检流计振镜4-1的Y轴偏转到第一光电传感器5-1的靶面上,检流计振镜4-1的Y振镜的电压为电压2时,检流计振镜4-1的Y轴偏转到第二光电传感器5-2的靶面上。
当检流计振镜4-1的Y轴偏转到第一光电传感器5-1的靶面上时,X振镜的电压分别设置为电压1、电压2、电压3和电压4,对应检流计振镜4-1的X轴偏转到第一光电传感器5-1的靶面上第一子图像的位置处、第二子图像的位置处、第三子图像的位置处和第四子图像的位置处(对应图3中的P1、P2、P3和P4)。
当检流计振镜4-1的Y轴偏转到第二光电传感器5-2的靶面上,X振镜的电压分别设置为电压4、电压3、电压2和电压1,对应检流计振镜4-1的X轴偏转到第二光电传感器5-2的靶面上第一子图像的位置处、第二子图像的位置处、第三子图像的位置处和第四子图像的位置处(对应图3中的P5、P6、P7和P8)。
X振镜上各个电压保持的时间包括光信号汇聚时间和切换时间,光信号汇聚时间指光信号汇聚到第一光电传感器5-1或第二光电传感器5-2某一子图像的位置处的时间,切换时间指在两个汇聚位置之间进行切换的时间。光源在光信号汇聚时间保持开,光源在切换时间保持关,因此,光源属于不停关和开的过程,由控制系统控制光源的开和关。
具体地,检流计振镜4-1的Y轴偏转到第一光电传感器5-1的靶面上,X轴偏转到第一光电传感器5-1的靶面上第一子图像的位置处。待检流计振镜4-1稳定后打开光源系统1,激光器1-1发出的照明光经透镜1-2、二向色镜3-2和显微物镜3-1照射在样品2上,样品2发射出光信号,经显微成像系统3收集,光信号经显微物镜3-1、二向色镜3-2、第一聚焦透镜3-3、反射镜3-4、光阑3-5、第二聚焦透镜3-6、检流计振镜4-1、第三聚焦透镜4-2后,经三角分光镜4-3分光聚焦在第一光电传感器5-1和第二光电传感器5-2,对样品2的光信号进行采集。
采集时间到达后,检流计振镜4-1的X轴偏转到第一光电传感器5-1的靶面上第二子图像的位置处,待检流计振镜4-1稳定后打开激光器1-1,并对样品2的光信号进行采集。
采集时间到达后,检流计振镜4-1的X轴偏转到第一光电传感器5-1的靶面上第三子图像的位置处,待检流计振镜4-1稳定后打开激光器1-1,并对样品2的光信号进行采集。
采集时间到达后,检流计振镜4-1的X轴偏转到第一光电传感器5-1的靶面上第四子图像的位置处,待检流计振镜4-1稳定后打开激光器1-1,并对样品2的光信号进行采集。
在第一光电传感器5-1进行光信号采集的过程中,第二光电传感器5-2对其已经采集的信号进行转换并将其四个子图像的信号数字化传输至控制系统中。
检流计振镜4-1的Y轴偏转到光电传感器5-2的靶面上,检流计振镜4-1的X轴偏转到第二光电传感器5-2的靶面上第一子图像的位置处,待检流计振镜4-1稳定后打开光源系统1,并对样品2的光信号进行采集。
采集时间到达后,检流计振镜4-1的X轴偏转到第二光电传感器5-2的靶面上第二子图像的位置处,检流计振镜4-1位置稳定后打开光源系统1,并对样品2的光信号进行采集。
采集时间到达后,检流计振镜4-1的X轴偏转到第二光电传感器5-2的靶面上第三子图像的位置处,检流计振镜4-1位置稳定后打开光源系统1,并对样品2的光信号进行采集。
采集时间到达后,检流计振镜4-1的X轴偏转到第二光电传感器5-2的靶面上第四子图像的位置处,检流计振镜4-1位置稳定后打开光源系统1,并对样品2的光信号进行采集。
在第二光电传感器5-2进行光信号采集的过程中,第一光电传感器5-1对其已经采集的信号进行转换并将其四个子图像的信号数字化传输至控制系统中。
重复进行上述光信号采集的过程,直至全部数据采集完成。
如图3所示,在X轴偏转到第一光电传感器5-1的靶面上的时间里,第一光电传感器5-1进行光信号的采集,第二光电传感器5-2对其已经采集的信号进行数据转换,在X轴偏转到第二光电传感器5-2的靶面上的时间里,第一光电传感器5-1对其已经采集的信号进行数据转换,第二光电传感器5-2进行光信号的采集,即第一光电传感器5-1和第二光电传感器5-2交替进行光信号的积分以及信号转换,能够使光电传感器的光信号积分和积分信号读出两个过程相分离,从而防止读出过程对积分过程的影响,保证图像曝光的同步,同时也可以增加图像的采集速度。
每个传感器中子区域之间切换的时间为切换时间与曝光时间之和,子区域之间切换的时间相当于时间分辨率,例如图3中P1和P2之间的切换时间加上P2的曝光时间为时间分辨率。检流计振镜4-1进行小角度切换的时间在400us以下,因此使用1ms的采样时间时,每次采样有大于600us的曝光时间,同时对于两个光电传感器来说有约4ms的数据转换时间,按照10us完成一行转换,同时转换两行计算,能够实现最大800像素高度的图像采集,如图4所示,本实施例中每个子图像的尺寸设置为500*500像素,第一SCMOS图像传感器和第二SCMOS图像传感器(对应第一光电传感器和第二光电传感器)得到的图像尺寸为2048*2048像素,从而能够在高速成像过程中能够提供更大的成像尺寸;转换时间足够子图像的读取,同时采集过程也能保证每个子图像中各行的曝光时间是一致的。
本领域技术人员应当知晓,图2中光束偏转系统包括检流计振镜4-1、第三聚焦透镜4-2和三角分光镜4-3,光电传感器系统包括两个光电传感器,每个光电传感器的感光面包括4个子区域只是其中一个实施例,并不构成对本实用新型实施例的限定,本领域技术人员可以根据实际需要设置其他光偏转器,设置M个光电传感器,每个光电传感器设置N个子区域,只需要根据光电传感器的数量控制光偏转器旋转不同的角度,M≥2,N≥2,例如M可以是4,6,8等,N可以是2,6,8等。
本实用新型提出了一种高速大视野显微成像装置,解决了传统装置中成像速度慢和成像区域小的缺点,不仅提高了成像速度,还使成像区域变大,同时也解决了同一张图像曝光时间不一致的问题,可以应用于生物学研究领域,例如细胞膜电位测量方式中进行高速成像。
以上是对本实用新型的较佳实施进行了具体说明,但本实用新型并不局限于上述实施方式,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可作出种种的等同变形或替换,这些等同的变形或替换均包含在本实用新型权利要求所限定的范围内。
一种高速大视野显微成像装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0