






专利摘要
本发明公开了一种用于汽轮发电机组甩负荷后快速稳定转速的方法,本发明能够在机组甩负荷后,中压缸进汽量不足的情况下,自动调整高压缸进汽流量以维持机组在额定转速附近,极大减轻了运行人员对汽机侧的工作压力及工作量,同时机组尽快并网发电,有益机组安全,经济性也得到保障,可以克服目前现有技术的不足。
权利要求
1.一种用于汽轮发电机组甩负荷后快速稳定转速的方法,其特征在于:包括以下步骤:
第一步、当汽轮发电机组发生甩负荷后,机组控制逻辑立即投入,并自动给定一个再热蒸汽的压力设定值;
第二步、机组控制系统自动将设定的再热蒸汽的压力值与DEH压力监测系统实时测取的再热蒸汽压力实际值相比较;蒸汽压力比较值Δp的数学表达式为:
Δp=p1-p2
式中:Δp为蒸汽压力比较值,p1为给定再热汽压力,p2为实际再热汽压力;
第三步、根据步骤(二)比较计算后输出蒸汽压力比较值Δp,当Δp为负值时,PID控制器B的输出值Δx2为0;当Δp为正值时,此时PID控制器B输出值Δx2为正值;
第四步、将Δx2与PID控制器A的输出值Δx相叠加,再作用在高压调节门阀位函数上,生成并输出值g(Δx+Δx2)阀位指令;
第五步、根据生成并输出值g(Δx+Δx2)阀位指令,控制高压调节门开度,直至机组转速稳定在额定转速附近;
第六步、当机组重新并网或再热蒸汽压力经调整后上升至Δp输出值为负时,将逻辑投切按钮选择切除,结束转速稳定控制。
2.根据权利要求1所述的一种用于汽轮发电机组甩负荷后快速稳定转速的方法,其特征在于:所述的机组控制逻辑为可在机组正常运行中投入,防止机组甩负荷后操作不及引起转速波动大,导致机组长时间空转不能并网,造成机组损伤。
说明书
技术领域
本发明属于火力发电技术领域,涉及一种能够在汽轮发电机组甩负荷后快速稳定机组转速的方法。
背景技术
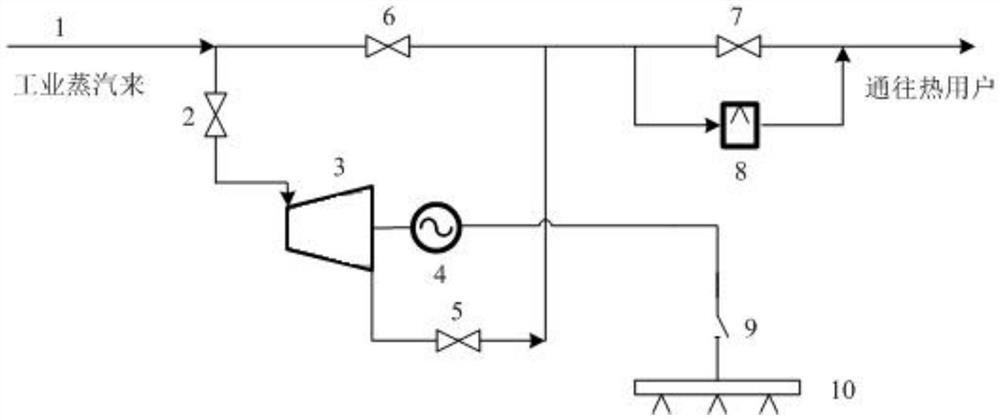
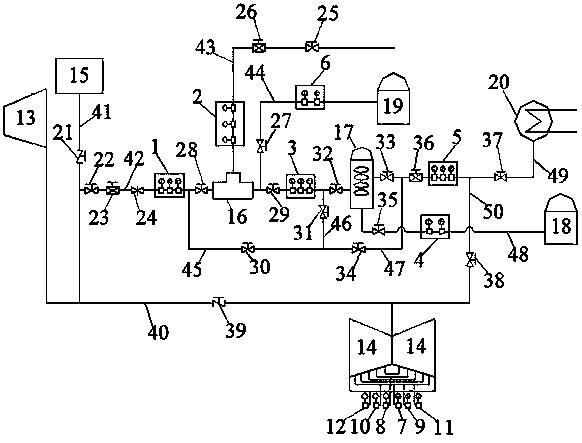
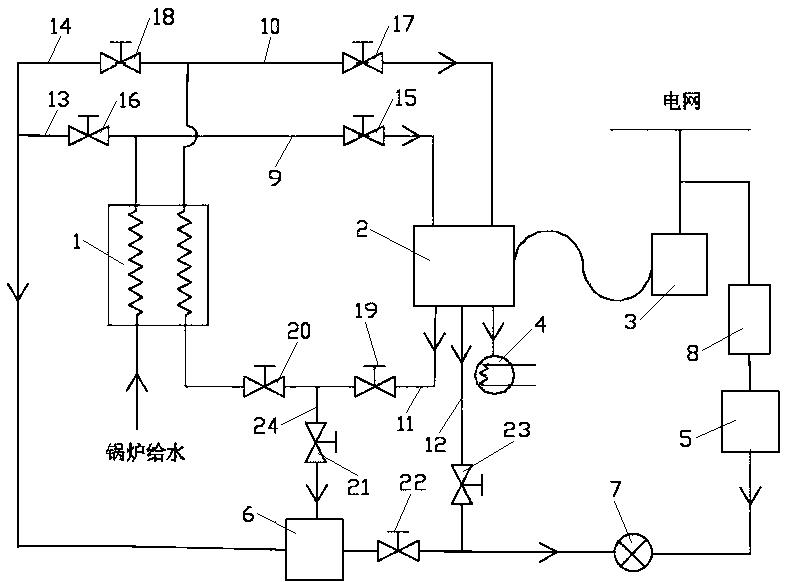
汽轮发电机组发生甩负荷后,转速会飞升至一个峰值,DEH(DigitalElectricHydraulic Control System)控制系统在甩负荷的瞬间将机组目标转速置为机组额定转速(国内机组为3000r/min,对应50Hz频率),当机组转速从峰值逐渐下降并低于额定转速后,此时高压主汽门(TV)及再热中压主汽门(RSV)处于全开状态,转速是通过开关高压调节门(GV)及中压调节门(IV)进行调节的。机组甩负荷后热力系统具体工作过程如图1所示:锅炉生产出来的过热蒸汽通过机组左右侧过热蒸汽管道,经高压主汽门(TV)、高压调节门(GV)进入高压缸进行做功,做功完成后的蒸汽经高排通风阀排放至凝汽器或经高排逆止门排至再热器系统,经锅炉再热器加热后形成的再热蒸汽,通过机组左右侧再热蒸汽管道,经再热中压汽门(RSV)、中压调节门(IV)进入高压缸进行做功;在中压缸做功完成后的蒸汽经联通管进入低压缸继续做功,在在低压缸做功完成后的蒸汽最终会进入凝汽器。
甩负荷发生原因:(1)新建或进行过调节系统、通流部分增容改造的汽轮发电机组,按相关标准需要考核汽轮机调节系统的动态特性,检验各配套辅机及相关系统设计对极端工况的适应性,需进行甩负荷试验。
(2)电网的日趋庞大、火电厂运行的多专业、多设备连续动态复杂生产过程以及雷电、电网覆冰等自然灾害决定了汽轮发电机组发生甩负荷的概率极大。
目前甩负荷存在的问题:(1)甩负荷是汽轮发电机组最恶劣的一种运行工况,对设备安全及寿命有一定影响。目前绝大多数新建和已投运汽轮发电机组的高、中压缸负荷比例采用固定分配方式(无法在线更改或下装),在转速控制过程中普遍存在中压缸负荷比例过高的问题。由汽轮机热力系统流程可知,中压缸进汽受制于高、低压旁路阀门的开度以及高压缸进、排汽量(高、低压旁路阀主要用于机组启动阶段对主、再热蒸汽压力、温度的控制。在带高负荷时机组温度压力高,此时较难控制高、低旁阀门开度,太小容易吹蚀损坏阀门阀芯,太大容易导致旁路阀后管道超温超压)。在甩负荷这样的极端工况下,运行人员往往来不及对旁路阀门进行调整,极容易出现再热蒸汽压力大幅波动,导致机组转速控制调节品质变差,机组的转速在短时间内难以稳定,给非故障甩负荷机组、带FCB机组重新并网带来困难。
(2)在现有技术条件下,机组发生甩负荷后由于锅炉蓄热作用,将引起主、再热蒸汽汽压升高,存储大量蒸汽。要求机组运行人员在甩负荷后的短短数秒内,对非故障机组及带FCB功能机组需要尽快稳定机组转速后重新并网,同时还需对锅炉、汽机、热工等相关系统进行及时调整(锅炉需防止过热器、再热器超压,锅炉熄火,机侧维持给水、凝结水、轴封汽等系统正常,热工电气需核实相关信号、保护投入情况,为机组重新并网做准备),因此对运行人员的要求极高,同时工作量、工作风险及工作压力也极大。
(3)甩负荷后汽轮机长时间空转运行,由于机组进汽量大大低于带负荷工况,汽轮发电机组调节阀节流作用会使进汽温度降低,导致高温缸体急速冷却,热应力加大甚至会影响机组安全。同时甩负荷后长时间空转运行不利于控制机组上、下缸温差、胀差等参数,严重时会发生叶片损坏或汽轮机动静部件摩擦等造成汽轮机损伤的事件发生。
针对目前大多数机组甩负荷后存在转速波动较大,不能快速实现重新并网带负荷问题,且甩负荷后对运行操作要求较高、本发明提出了一种用于甩负荷后稳定汽轮发电机组转速的方法。
发明内容
本发明主要解决汽轮发电机组各缸体在空负荷阶段各缸体负荷分配比例不协调,导致甩负荷后转速波动大、运行人员操作繁琐的问题,发明一种能够自动改变高、中压缸负荷比例的方法,该方法能够快速稳定汽轮发电机组甩负荷后的转速、自动化程度高,可缓解运行人员工作压力,从而克服现有的技术不足。
本发明提供的技术方案为:一种用于汽轮发电机组甩负荷后快速稳定转速的方法,其特征在于:包括以下步骤:
第一步、当汽轮发电机组发生甩负荷后,机组控制逻辑立即投入,并自动给定一个再热蒸汽的压力设定值;
第二步、机组控制系统自动将设定的再热蒸汽的压力值与DEH压力监测系统实时测取的再热蒸汽压力实际值相比较;
第三步、根据步骤(二)比较计算后输出蒸汽压力比较值Δp,当Δp为负值时,PID控制器B的输出值Δx2为0;当Δp为正值时,此时PID控制器B输出值Δx2为正值;
第四步、将Δx2与PID控制器A的输出值Δx相叠加,再作用在高压调节门阀位函数上,生成并输出值g(Δx+Δx2);
第五步、根据生成并输出值g(Δx+Δx2)逐渐开启高压调节门,直至机组转速稳定在额定转速附近;
第六步、当机组重新并网或再热蒸汽压力经调整后上升至Δp输出值为负时,将逻辑投切按钮选择切除,结束转速稳定控制。
所述的蒸汽压力比较值Δp的数学表达式为:
Δp=p1-p2
式中:Δp为蒸汽压力比较值,p1为给定再热汽压力,p2为实际再热汽压力。
所述的机组控制逻辑也可在机组正常运行中投入,防止机组甩负荷后操作不及。
本发明逻辑动作原理如下:当汽轮发电机组发生甩负荷后,立即投入逻辑按钮(也可在机组正常运行中投入,防止机组甩负荷后操作不及),并设定再热蒸汽的压力值(如哈尔滨汽轮机厂生产的超临界600MW级汽轮机再热压力在转速控制方式下一般设定在0.8~1.0MPa左右比较合适,该值可随机组工况随时调整输入),将设定的压力值与DEH压力监测系统实时测取的再热蒸汽压力实际值相比较,输出比较值Δp,当Δp为负值时,PID控制器B输出值Δx2为0,此时说明再热蒸汽参数足以维持机组转速在额定值;当Δp为正值时,说明再热蒸汽参数不足以维持机组转速稳定在额定值,此时PID控制器B输出值Δx2为正值,该值与PID控制器A输出值Δx相叠加,再作用在高压调节门阀位函数上,生成并输出值g(Δx+Δx2)阀位指令,逐渐开启高压调节门,直至机组转速稳定在额定转速附近,当机组重新并网或再热蒸汽压力经调整后上升至Δp输出值为负时,可将逻辑投切按钮选择切除,转速稳定控制逻辑工作结束。
本发明能够在机组甩负荷后,中压缸进汽量不足的情况下,自动调整高压缸进汽流量以维持机组在额定转速附近。极大减轻了运行人员对汽机侧的工作压力及工作量,同时机组尽快并网发电,有益机组安全,经济性也得到保障。
附图说明
图1为本发明用于稳定机组甩负荷后的转速控制原理示意图;
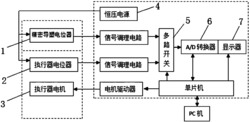
附图2为转速控制系统原理示意图;
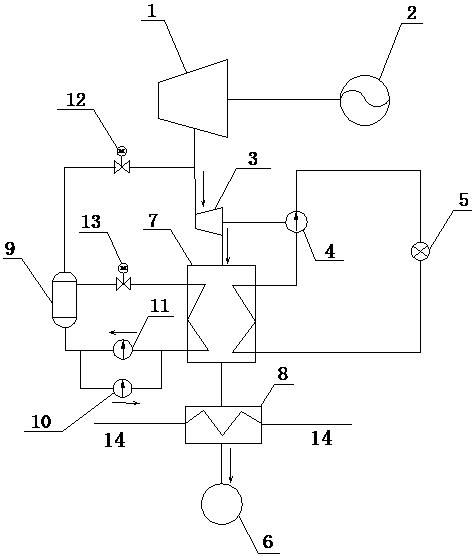
附图3:为汽轮发电机组热力系统示意图;
图4为本发明试验时A厂#2汽轮发电机组甩负荷过程录波曲线图;
图5为本发明试验时B厂#2汽轮发电机组甩负荷过程录波曲线图;
图6为本发明试验时C厂#1汽轮发电机组甩负荷过程录波曲线图。
具体实施方式
下面结合附图详细说明本发明的优选实施例。
按照以下步骤进行试验:
第一步、当汽轮发电机组发生甩负荷后,机组控制逻辑立即投入,并自动给定一个再热蒸汽的压力设定值;
第二步、机组控制系统自动将设定的再热蒸汽的压力值与DEH压力监测系统实时测取的再热蒸汽压力实际值相比较;
第三步、根据步骤(二)比较计算后输出蒸汽压力比较值Δp,当Δp为负值时,PID控制器B的输出值Δx2为0;当Δp为正值时,此时PID控制器B输出值Δx2为正值;
第四步、将Δx2与PID控制器A的输出值Δx相叠加,再作用在高压调节门阀位函数上,生成并输出值g(Δx+Δx2)阀位指令;
第五步、根据生成并输出值g(Δx+Δx2)阀位指令,逐渐开启高压调节门,直至机组转速稳定在额定转速附近;
第六步、当机组重新并网或再热蒸汽压力经调整后上升至Δp输出值为负时,将逻辑投切按钮选择切除,结束转速稳定控制。
所述的蒸汽压力比较值Δp的数学表达式为:
Δp=p1-p2
式中:Δp为蒸汽压力比较值,p1为给定再热汽压力,p2为实际再热汽压力。
所述的机组控制逻辑也可在机组正常运行中投入,防止机组甩负荷后操作不及。
本发明逻辑动作原理如下:当汽轮发电机组发生甩负荷后,立即投入逻辑按钮(也可在机组正常运行中投入,防止机组甩负荷后操作不及),并设定再热蒸汽的压力值(如哈尔滨汽轮机厂生产的超临界600MW级汽轮机再热压力在转速控制方式下一般设定在0.8~1.0MPa左右比较合适,该值可随机组工况随时调整输入),将设定的压力值与DEH压力监测系统实时测取的再热蒸汽压力实际值相比较,输出比较值Δp,当Δp为负值时,PID控制器B输出值Δx2为0,此时说明再热蒸汽参数足以维持机组转速在额定值;当Δp为正值时,说明再热蒸汽参数不足以维持机组转速稳定在额定值,此时PID控制器B输出值Δx2为正值,该值与PID控制器A输出值Δx相叠加,再作用在高压调节门阀位函数上,生成并输出值g(Δx+Δx2)阀位指令,逐渐开启高压调节门,直至机组转速稳定在额定转速附近,当机组重新并网或再热蒸汽压力经调整后上升至Δp输出值为负时,可将逻辑投切按钮选择切除,转速稳定控制逻辑工作结束。
上述各参数的关系如下:
式中:Δω为设定转速ω1与实际转速ω2的偏差值;
Δp为设定再热汽压力p1与实际再热汽压力p2的偏差值;
Δx1为PID控制器A输出的综合阀位指令,对应数字为0%~100%;
Δx为Δx1经速率限制后阀位指令,对应数字为0%~100%;
Δx2为PID控制器B输出的修正高压主汽阀位指令,对应数字为0%~100%;
g(Δx+Δx2)是与Δx+Δx2相关的线性函数,对应高压主汽门的全关
(0%)及全开(100%);
h(Δx)是与Δx相关的线性函数,对应中压调节门的全关(0%)及全开(100%)。
某A厂#2汽轮机是哈尔滨汽轮机生产的660MW超临界汽轮机,采用高中压缸联合启动方式,型号分别为N660-24.2/566/566;某B厂#2汽轮机也是哈尔滨汽轮机厂生产的660MW超临界汽轮机,采用高中压缸联合启动方式,型号分别为CLN660-24.2/566/566;某C厂#1汽轮机由东方汽轮机厂制造的660MW超临界机组,采用中压缸启动方式,型号为N660-24.2/566/566。三台机组在正式商业投产前均进行了进行甩负荷试验,其中A厂采用了本发明方法,B厂、C厂为运行人员自行调整,相关结果见表1:
表1本发明与现有技术对高压缸暖机效果对比
由表1可知,甩负荷后采用本发明方法的A厂,机组最低转速与额定值相差不大,稳定时间也只有27s,而B厂、C厂采用人工调整的方式,最低转速均降低较多,分别为2980r/min及3000r/min,稳定时间也跟A厂相差较大,为A厂的3~11倍左右,因此,本发明在甩负荷后稳定机组转速、减轻运行人员劳动强度方面有较大优势。A、B、C三厂甩负荷过程的录波曲线见附图4、5、6。
一种用于汽轮发电机组甩负荷后快速稳定转速的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0