

IPC分类号 : B62D6/00I,B60R21/013I,B60R21/00I,B60R21/13I,B60R16/023I,B62D137/00N





专利摘要
本发明涉及轮式拖拉机主动安全技术领域,尤其涉及基于主动转向控制的轮式拖拉机主动防侧翻控制方法与系统。该系统包括倾角传感器(1)、角速度传感器(2)、中央控制单元(3)、步进电机(4)和横摆角传感器(5);倾角传感器(1)、角速度传感器(2)和横摆角传感器(5)共同采集拖拉机行进过程中的运动参数,包括拖拉机整机实时状态侧倾角、拖拉机整机侧倾角速度和整机横摆角;中央控制单元(3)根据采集的拖拉机侧倾失稳状态信号,判断拖拉机侧翻趋势,计算该侧翻工况下所需主动转向的主动转向角大小,并根据计算结果控制步进电机(4)工作,带动方向管柱内轴旋转,配合拖拉机液压助力转向系统实现拖拉机的主动转向与回稳控制。
权利要求
1.一种利用基于主动转向控制的轮式拖拉机主动防侧翻控制系统的轮式拖拉机主动防侧翻控制方法,其中,
基于主动转向控制的轮式拖拉机主动防侧翻控制系统,包括倾角传感器(1)、角速度传感器(2)、中央控制单元(3)、步进电机(4)和横摆角传感器(5);其中,
倾角传感器(1)、角速度传感器(2)和中央控制单元(3)布置在拖拉机底盘后部下侧纵向轴线位置;
横摆角传感器(5)布置在拖拉机底盘前部纵向轴线位置;
步进电机(4)布置在拖拉机方向盘底部;
倾角传感器(1)、角速度传感器(2)和横摆角传感器(5)共同采集拖拉机行进过程中的运动参数,包括拖拉机整机实时状态侧倾角、拖拉机整机侧倾角速度和整机横摆角;
中央控制单元(3)分别和倾角传感器(1)、角速度传感器(2)和横摆角传感器(5)相连,用于根据采集的拖拉机侧倾失稳状态信号,判断拖拉机侧翻趋势,计算该侧翻工况下所需主动转向的主动转向角大小,并根据计算结果控制步进电机(4)工作,带动方向管柱内轴旋转,配合拖拉机液压助力转向系统实现拖拉机的主动转向与回稳控制;
其特征在于:所述方法包括以下步骤:
当拖拉机整机系统处于有侧翻趋势的状态时:
步骤A1:布置在拖拉机底盘后部下侧纵向轴线位置的倾角传感器(1)、角速度传感器(2)以及布置在拖拉机底盘前部纵向轴线位置的横摆角传感器(5)分别采集到拖拉机行进过程中的拖拉机整机实时状态侧倾角、拖拉机整机侧倾角加速度和拖拉机整机横摆角,并将所述拖拉机整机实时状态侧倾角、拖拉机整机侧倾角加速度和拖拉机整机横摆角输入到中央控制单元(3);
步骤A2:中央控制单元(3)接收倾角传感器(1)、角速度传感器(2)以及横摆角传感器(5)的输入信号,即拖拉机整机实时状态侧倾角、拖拉机整机侧倾角加速度和拖拉机整机横摆角,并利用扩展卡尔曼滤波算法对所述传感器输入信号进行滤波降噪处理;
步骤A3:中央控制单元(3)根据基于能量法的拖拉机侧翻评价指标i
式中,拖拉机侧翻评价指标i
拖拉机侧翻动能E
式中,
拖拉机重力势能E
式中,M为拖拉机整机质量,单位是kg;g为重力加速度,g=9.8m/s
其中,当i
步骤A4:根据转向角推算公式计算主动转向角δ;
转向角推算公式为:
式中,
δ为主动转向角,单位是rad;
L
Ψ为拖拉机整机横摆角,单位是rad;其中,Ψ由横摆角传感器(5)实时获取;
a
V
J
M为拖拉机整机质量,单位是kg;
g为重力加速度,g=9.8m/s
k
j
H
w
步骤A5:中央控制单元(3)根据步骤A4中得到的计算结果控制步进电机(4)转动,通过链传动带动方向管柱及方向盘做出大小为步骤A4中转向角推算公式中的主动转向角δ,且与侧翻方向相同的转向,从而实现主动转向,以达到防止侧翻的目标;
当拖拉机整机系统处于稳定状态时:
步骤B1:拖拉机整机系统回稳后,中央控制单元(3)控制步进电机(4)反向回转步骤A4中得到的主动转向角δ,达到回稳直行的目的;
步骤B2:倾角传感器(1)、角速度传感器(2)及横摆角传感器(5)实时监测拖拉机姿态,防止下一次整机侧翻趋势的发生。
2.如权利要求1所述的基于主动转向控制的轮式拖拉机主动防侧翻控制系统的轮式拖拉机主动防侧翻控制方法,其特征在于:步进电机(4)布置在拖拉机方向盘底部的方向管柱一侧,步进电机(4)的动力输出轴通过链传动连接步进电机动力输出轴与方向盘方向管柱内轴。
说明书
技术领域
本发明涉及轮式拖拉机主动安全技术领域,尤其涉及基于主动转向控制的轮式拖拉机主动防侧翻控制方法与系统。
背景技术
轮式拖拉机作为农业生产中广泛使用的动力机械,极大地提高了农业生产效率,促进了世界各国农业机械化的发展进程。然而,由于拖拉机工作环境复杂,作业条件较差,不同农艺作业工况对其通过性要求较高导致其具有工作离地间隙高等特点,导致不同环境下的拖拉机致死事故时有发生。此外,统计结果显示,近年来在全球范围内发生的轮式拖拉机致死事故中,侧翻事故占比超过50%,侧翻是导致致死事故发生的罪魁祸首。虽然自上世纪50年代起,拖拉机侧翻问题已受到一定关注,但拖拉机侧翻问题始终未得到根本性解决,由此带来了巨大的人身伤害和经济损失。
目前,拖拉机防侧翻方法分为被动安全保护法和主动安全保护法。其中,最常见的被动安全保护法的代表是被动安全装置—侧翻保护装置(ROPS,Rollover ProtectiveStructure)。发生侧翻事故时,ROPS通过吸收侧翻过程中产生的动能,并为驾驶员提供安全的容身空间等方式降低了侧翻事故的致死率。然而相关数据表明,世界范围内,尤其是欠发达国家内,仍有8%-10%的拖拉机未安装或未正确安装ROPS,拖拉机作业安全隐患仍然存在。因此ROPS并不能从根本上解决拖拉机侧翻致死问题。另一方面,在主动安全技术领域,部分学者采用前、后轮主动转向控制和后轮驱动力与制动力控制实现了车辆横摆稳定性主动控制,运用横摆力矩补偿法显著减小了侧向力控制器的跟踪误差,从而一定范围内实现了对车辆横摆稳定性的控制。也有学者提出了基于前轮主动转向和横摆力矩集成控制的分层控制策略,采用滑模控制方法,通过控制车轮制动力产生横摆力矩,改善了车辆稳定性。此外,为提高拖拉机在侧向坡地行驶时的稳定性,部分学者对山地拖拉机的稳定性控制器和行走机构进行了研究,该机型可在24.2°的侧向坡地上稳定行驶,但牵引和越野性能欠缺。
发明内容
本发明的目的在于提供一种基于主动转向控制的轮式拖拉机主动防侧翻控制系统,通过基于能量法的稳定性评价指标对轮式拖拉机侧翻趋势进行评价与判断,在侧翻发生时进行主动转向控制,利用主动转向过程中产生的轮胎侧偏力以及重心与侧翻轴位置的改变实现整机的主动回稳与姿态回正,且不需对拖拉机原有结构和配置作较大改变,具有较强的应用价值。
本发明的另一目的在于提供一种基于主动转向控制的轮式拖拉机主动防侧翻控制方法。
本发明的目的是通过以下技术方案实现的:
一种基于主动转向控制的轮式拖拉机主动防侧翻控制系统,所述系统包括倾角传感器1、角速度传感器2、中央控制单元3、步进电机4和横摆角传感器5;其中,
倾角传感器1、角速度传感器2和中央控制单元3布置在拖拉机底盘后部下侧纵向轴线位置;
横摆角传感器5布置在拖拉机底盘前部纵向轴线位置;
步进电机4布置在拖拉机方向盘底部;
倾角传感器1、角速度传感器2和横摆角传感器5共同采集拖拉机行进过程中的运动参数,包括拖拉机整机实时状态侧倾角、拖拉机整机侧倾角速度和整机横摆角;
中央控制单元3分别和倾角传感器1、角速度传感器2和横摆角传感器5相连,用于根据采集的拖拉机侧倾失稳状态信号,判断拖拉机侧翻趋势,计算该侧翻工况下所需主动转向的主动转向角大小,并根据计算结果控制步进电机4工作,带动方向管柱内轴旋转,配合拖拉机液压助力转向系统实现拖拉机的主动转向与回稳控制。
步进电机4布置在拖拉机方向盘底部的方向管柱一侧,步进电机4的动力输出轴通过链传动连接步进电机动力输出轴与方向盘方向管柱内轴。
一种利用所述的基于主动转向控制的轮式拖拉机主动防侧翻控制系统的轮式拖拉机主动防侧翻控制方法,所述方法包括以下步骤:
当拖拉机整机系统处于有侧翻趋势的状态时:
步骤A1:布置在拖拉机底盘后部下侧纵向轴线位置的倾角传感器1、角速度传感器2以及布置在拖拉机底盘前部纵向轴线位置的横摆角传感器5分别采集到拖拉机行进过程中的拖拉机整机实时状态侧倾角、拖拉机整机侧倾角加速度和拖拉机整机横摆角,并将所述拖拉机整机实时状态侧倾角、拖拉机整机侧倾角加速度和拖拉机整机横摆角输入到中央控制单元3;
步骤A2:中央控制单元3接收倾角传感器1、角速度传感器2以及横摆角传感器5的输入信号,即拖拉机整机实时状态侧倾角、拖拉机整机侧倾角加速度和拖拉机整机横摆角,并利用扩展卡尔曼滤波算法对所述传感器输入信号进行滤波降噪处理;
步骤A3:中央控制单元3根据基于能量法的拖拉机侧翻评价指标iE计算评价拖拉机侧翻趋势;其中,当iE<1时,拖拉机整机系统处于稳定状态,进行步骤B2;当iE≥1时,拖拉机整机系统处于有侧翻趋势的状态,进行步骤A4;
步骤A4:根据转向角推算公式计算主动转向角δ;
转向角推算公式为:
式中,
δ为主动转向角,单位是rad;
Lf、Lr分别为前轴距和后轴距,单位是m;
Ψ为拖拉机整机横摆角,单位是rad;其中,Ψ由横摆角传感器5实时获取;
Vx为拖拉机前进速度,单位是m/s;
Jx为拖拉机转动惯量,单位是kg·m
为拖拉机侧倾角,单位是rad, 由倾角传感器1实时获取;
M为拖拉机整机质量,单位是kg;
g为重力加速度,g=9.8m/s
kf、kr分别为前后轮侧偏刚度系数;
jr为拖拉机质心到后轮中心的距离,单位是m;
Hr是拖拉机整机质心距离地面的高度,单位是m;
Wr是后轮距,单位是m;
步骤A5:中央控制单元3根据步骤A4中得到的计算结果控制步进电机4转动,通过链传动带动方向管柱及方向盘做出大小为步骤A4中转向角推算公式中的主动转向角δ,且与侧翻方向相同的转向,从而实现主动转向,以达到防止侧翻的目标;
当拖拉机整机系统处于稳定状态时:
步骤B1:拖拉机整机系统回稳后,中央控制单元3控制步进电机4反向回转步骤A4中得到的主动转向角δ,达到回稳直行的目的;
步骤B2:倾角传感器1、角速度传感器2及横摆角传感器5实时监测拖拉机姿态,防止下一次整机侧翻趋势的发生。
步骤A3中,基于能量法的拖拉机侧翻评价指标iE的计算公式为:
式中,拖拉机侧翻评价指标iE的取值范围为[0,+∞),其中,0表示拖拉机处于绝对稳定状态;Ek为拖拉机侧翻动能;Ep为拖拉机重力势能;
拖拉机侧翻动能Ek由公式3确定:
式中, 为拖拉机整机实时状态侧倾角,单位是rad, 由倾角传感器1实时获取;Jx为拖拉机转动惯量,单位是kg·m
拖拉机重力势能Ep由公式4确定:
式中,M为拖拉机整机质量,单位是kg;g为重力加速度,g=9.8m/s
本发明的技术有益效果在于:
1、适用面广:本发明原理简单、可操作性强,可用于各种型号的轮式拖拉机,改装过程中不需大幅改变轮式拖拉机原结构,仅需加装部分传感器和中央控制单元,同时借助于拖拉机自身配置的液压助力转向系统实现主动转向;
2、效果明显:本发明主要通过主动转向控制,实现行进过程中的拖拉机侧倾回稳,基于PID控制方法的控制策略反应迅速,针对一定范围内的拖拉机侧翻事故具有较好的抑制作用;
3、鲁棒性强:本发明在一定范围内可根据拖拉机侧翻评价指标推导对应的主动转向角度,进而施以不同转向角的主动转向控制,适应不同侧翻工况,具有鲁棒性强的特点。
附图说明
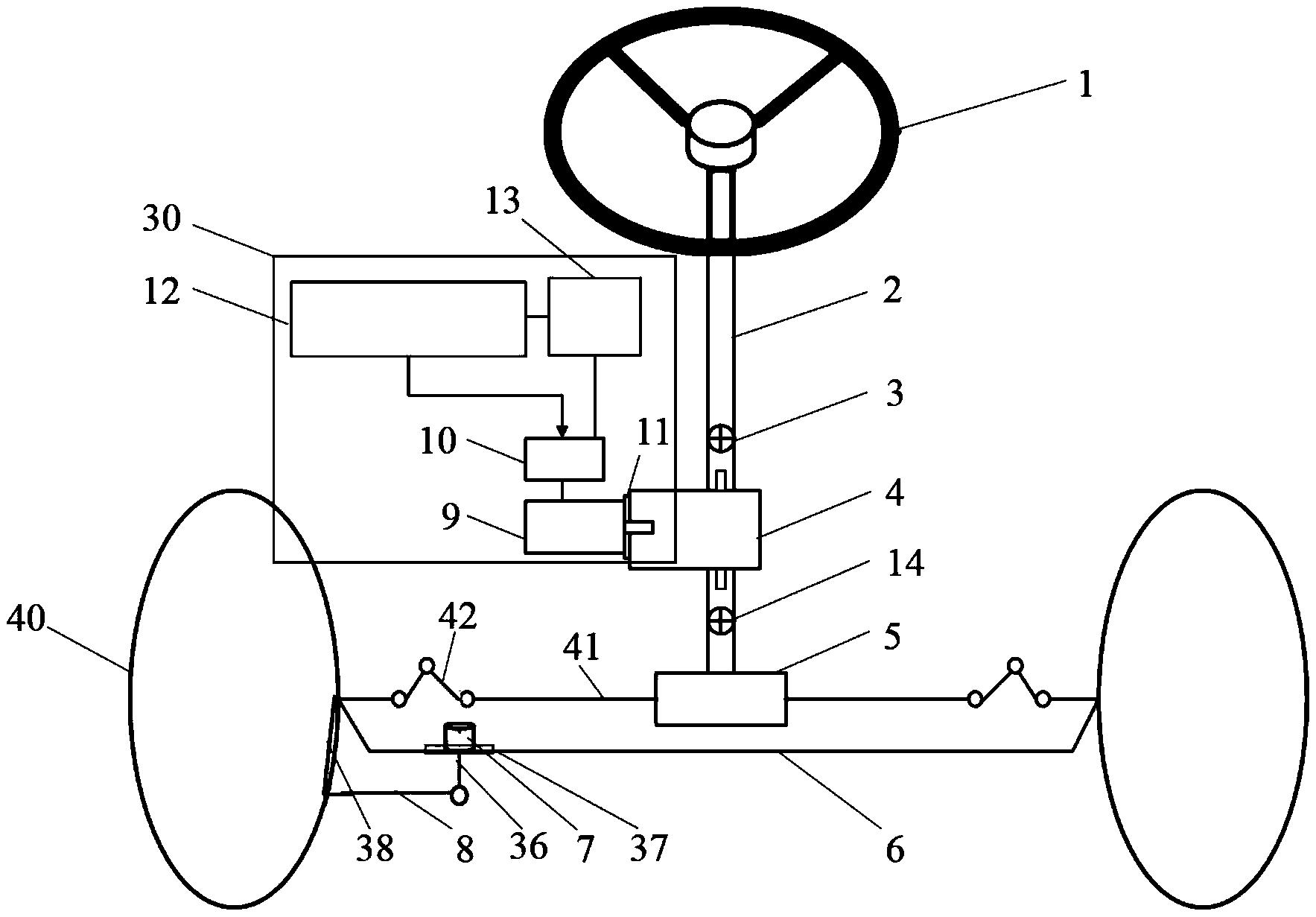
图1为本发明的基于主动转向控制的轮式拖拉机主动防侧翻控制系统的俯视示意图;
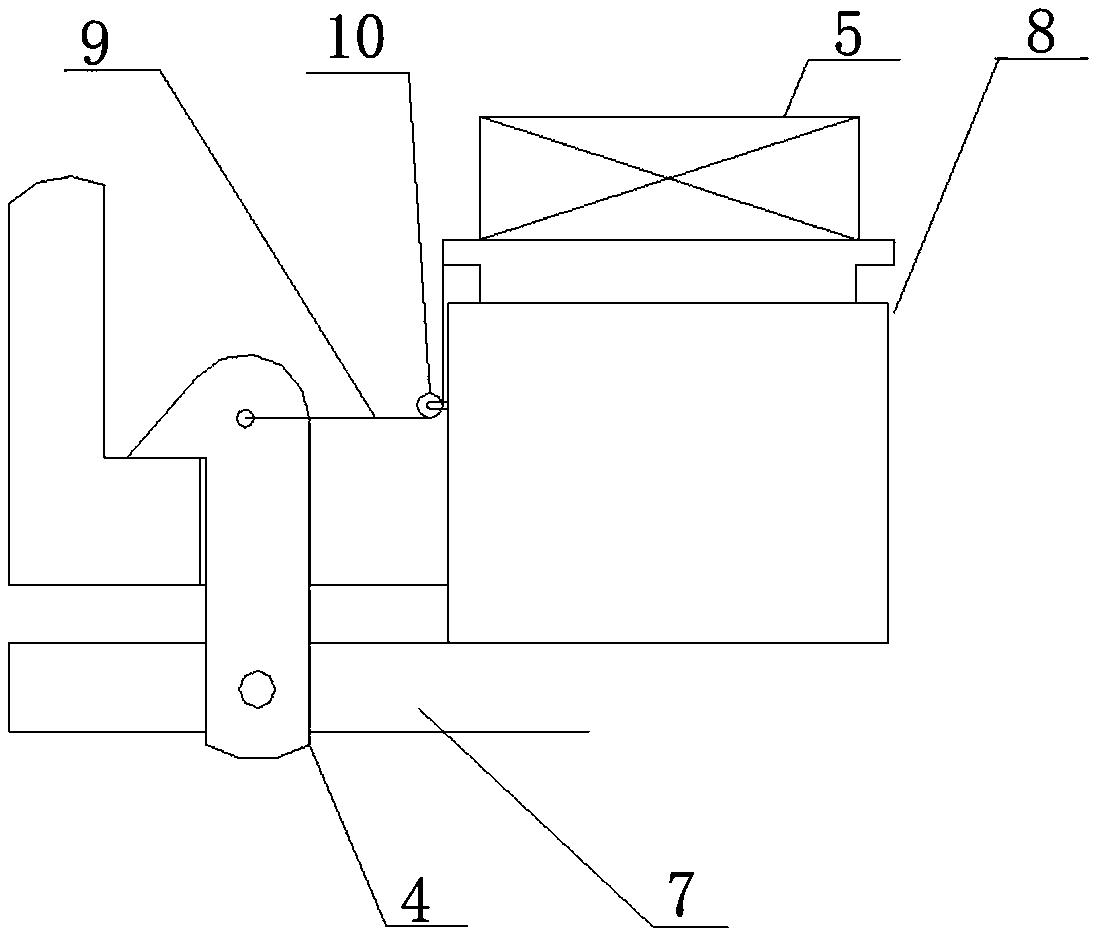
图2为本发明的基于主动转向控制的轮式拖拉机主动防侧翻控制系统的侧视示意图;
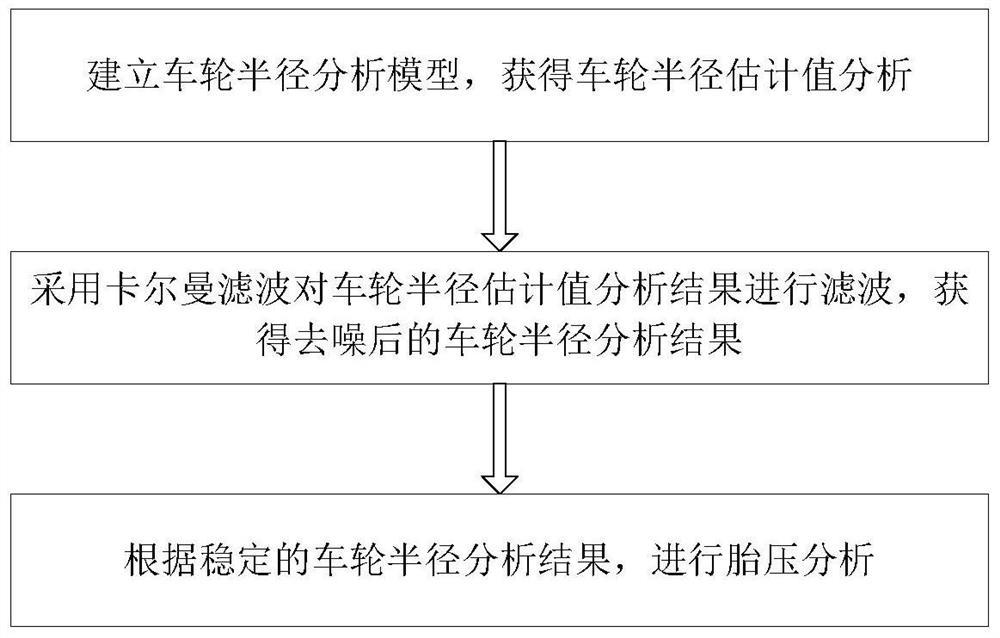
图3为本发明的基于主动转向控制的轮式拖拉机主动防侧翻控制方法的步骤框图。
附图标记:
1、倾角传感器 2、角速度传感器
3、中央控制单元 4、步进电机
5、横摆角传感器
具体实施方式
下面将结合附图和实施例对本发明的技术方案做进一步详细说明。
如图1~图2所示,一种基于主动转向控制的轮式拖拉机主动防侧翻控制系统,包括倾角传感器1、角速度传感器2、中央控制单元3、步进电机4和横摆角传感器5。
本发明的基于主动转向控制的轮式拖拉机主动防侧翻控制系统布置在配置有全液压助力转向系统的拖拉机上。其中,倾角传感器1、角速度传感器2和中央控制单元3布置在拖拉机底盘后部下侧纵向轴线位置。横摆角传感器5布置在拖拉机底盘前部纵向轴线位置。步进电机4布置在拖拉机方向盘底部,分别实现对拖拉机侧向稳定性状态的实时监测和依靠链传动方式的主动转向。
进一步地,步进电机4布置在拖拉机方向盘底部的方向管柱一侧,步进电机4的动力输出轴通过链传动连接步进电机动力输出轴与方向盘方向管柱内轴。拖拉机正常行驶工况时,步进电机4处于非工作状态。发生侧翻工况时,步进电机4接收来自中央控制单元3的信号,带动方向管柱内轴进行转动,实现主动转向。
所述中央控制单元3布置在拖拉机底盘后部下侧纵向轴线位置,优选布置于拖拉机驾驶座椅底部,该布置方式不占用驾驶室空间。中央控制单元3分别和倾角传感器1、角速度传感器2和横摆角传感器5相连,用于根据采集的拖拉机侧倾失稳状态信号,判断拖拉机侧翻趋势,计算该侧翻工况下所需主动转向的主动转向角大小,并根据计算结果控制步进电机4工作,带动方向管柱内轴旋转,配合拖拉机液压助力转向系统实现拖拉机的主动转向与回稳控制。
所述倾角传感器1和角速度传感器2布置在拖拉机底盘后部下侧纵向轴线,优选布置在拖拉机驾驶座椅下方,即整机质心位置,主要作用是与布置在拖拉机底盘前部纵向轴线位置的横摆角传感器5共同采集拖拉机行进过程中的运动参数,包括拖拉机整机实时状态侧倾角、拖拉机整机侧倾角速度和整机横摆角。其他主动转向控制理论推导过程中的参数能够通过拖拉机自身传感器获取,如前后轮轮距、当前时刻拖拉机行驶速度等。
转向过程中,系统控制主动转向方向与侧翻方向相同,此时由于轮胎转向过程中产生的轮胎侧向力垂直于轮胎面且方向与侧翻方向相同,作用于轮胎接地面处。根据扭矩定义可知,此时由轮胎侧向力产生的扭矩大小为:
T=FcfHf+FcrHr 公式1
式中,Fcf、Fcr分别为前轮和后轮转向时产生的侧偏力;Hf、Hr分别为前桥与机体质心高度。此时该扭矩方向与侧翻方向相反,起到防止侧翻的作用。
此外,主动转向技术对拖拉机侧翻的抑制作用还表现在当拖拉机侧翻时,主动转向为整机提供侧倾轴侧向移动,保证拖拉机整机重心垂直方向的投影位于侧倾轴内侧,从而致使整机重力在侧翻过程中做负功,间接地阻止了侧翻事故的发生。未配置主动转向控制系统的拖拉机在发生侧翻时,初始过程中重力做负功,阻止侧翻事故的发生;然而在侧翻过程的后期,当整机重心越过侧翻方向一侧的轮胎接地点连线时,重力做正功,加速侧翻事故的发生。当拖拉机配置有本发明系统后,在侧翻过程中,侧翻方向的转向动作使得整机侧翻轴线向侧翻方向偏移,延迟整机重心越过侧翻轴的时间,额外增加整机重力做负功时间,进而阻止或者延缓侧翻事故的发生。
如图3所示,本发明的一种基于主动转向控制的轮式拖拉机主动防侧翻控制方法,包括以下步骤:
当拖拉机整机系统处于有侧翻趋势的状态时:
步骤A1:布置在拖拉机底盘后部下侧纵向轴线位置的倾角传感器1、角速度传感器2以及布置在拖拉机底盘前部纵向轴线位置的横摆角传感器5分别采集到拖拉机行进过程中的拖拉机整机实时状态侧倾角、拖拉机整机侧倾角加速度和拖拉机整机横摆角,并将所述拖拉机整机实时状态侧倾角、拖拉机整机侧倾角加速度和拖拉机整机横摆角输入到中央控制单元3;
步骤A2:中央控制单元3接收倾角传感器1、角速度传感器2以及横摆角传感器5的输入信号,即拖拉机整机实时状态侧倾角、拖拉机整机侧倾角加速度和拖拉机整机横摆角,并利用扩展卡尔曼滤波算法对所述传感器输入信号进行滤波降噪处理;
步骤A3:中央控制单元3根据基于能量法的拖拉机侧翻评价指标iE计算评价拖拉机侧翻趋势;其中,当iE<1时,拖拉机整机系统处于稳定状态,进行步骤B2;当iE≥1时,拖拉机整机系统处于有侧翻趋势的状态,进行步骤A4。
其中,基于能量法的拖拉机侧翻评价指标iE的计算公式为:
式中,拖拉机侧翻评价指标iE的取值范围为[0,+∞),其中,0表示拖拉机处于绝对稳定状态;Ek为拖拉机侧翻动能;Ep为拖拉机重力势能。
拖拉机侧翻动能Ek由公式3确定:
式中, 为拖拉机整机实时状态侧倾角,单位是rad, 由倾角传感器1实时获取;Jx为拖拉机转动惯量,单位是kg·m
拖拉机重力势能Ep由公式4确定:
式中,M为拖拉机整机质量,单位是kg;g为重力加速度,g=9.8m/s
步骤A4:根据转向角推算公式计算主动转向角δ。转向角推算公式根据以下公式推导获得:
根据转向过程中拖拉机整机侧偏角为:
式中,β为整机侧偏角,单位是rad;ay为拖拉机整机侧倾角加速度,单位是rad/s;Vx为拖拉机前进速度,单位是m/s;Ψ为拖拉机整机横摆角,单位是rad。其中,ay由角速度传感器2获取的角速度求导得到;Ψ由横摆角传感器5实时获取。
进而,拖拉机前轮轮胎侧偏角为:
式中,βf、βr为前轮胎和后轮胎侧倾角,单位分别是rad;β为整机侧偏角,单位是rad;Lf、Lr分别为前轴距和后轴距,单位是m;Ψ为拖拉机整机横摆角,单位是rad;δ为主动转向角,单位是rad;Vx为拖拉机前进速度,单位是m/s。其中,Ψ由倾角传感器1实时获取。
由轮胎侧向力推导式:
式中,Fcf、Fcr分别为前轮和后轮的轮胎侧偏力,单位是N;kf、kr分别为前后轮侧偏刚度系数;β为整机侧偏角,单位是rad;Lf、Lr分别为前轴距和后轴距,单位是m;Ψ为拖拉机整机横摆角,单位是rad;δ为主动转向角,单位是rad;Vx为拖拉机前进速度,单位是m/s。
综上,联立公式3~7得到公式8,公式8即为所述转向角推算公式,可得主动转向角δ为:
式中,
δ为主动转向角,单位是rad;
Lf、Lr分别为前轴距和后轴距,单位是m;
Ψ为拖拉机整机横摆角,单位是rad;其中,Ψ由横摆角传感器5实时获取;
Vx为拖拉机前进速度,单位是m/s;
Jx为拖拉机转动惯量,单位是kg·m
为拖拉机侧倾角,单位是rad, 由倾角传感器1实时获取;
M为拖拉机整机质量,单位是kg;
g为重力加速度,g=9.8m/s
kf、kr分别为前后轮侧偏刚度系数;
jr为拖拉机质心到后轮中心的距离,单位是m;
Hr是拖拉机整机质心距离地面的高度,单位是m;
Wr是后轮距,单位是m。
步骤A5:中央控制单元3根据步骤A4中得到的计算结果控制步进电机4转动,通过链传动带动方向管柱及方向盘做出大小为步骤A4中公式8中主动转向角δ,且与侧翻方向相同的转向,从而实现主动转向,以达到防止侧翻的目标。
当拖拉机整机系统处于稳定状态时:
步骤B1:拖拉机整机系统回稳后,中央控制单元3控制步进电机4反向回转步骤A4中得到的主动转向角δ,达到回稳直行的目的;
步骤B2:倾角传感器1、角速度传感器2及横摆角传感器5实时监测拖拉机姿态,防止下一次整机侧翻趋势的发生。
基于主动转向控制的轮式拖拉机主动防侧翻控制方法与系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0