









专利摘要
一种桨腿式可变形水陆两栖六足机器人,涉及一种水陆两栖六足机器人。本发明解决了现有的水陆两栖六足机器人结构冗余复杂、水陆模式切换难、低运行效率低、速度慢,难以同时满足陆地越障和水下推进要求的问题。本发明的三个桨腿驱动模块固定在底盘的前部、中部和后部,电池安装在底盘上,且电池位于前部和中部的桨腿驱动模块之间,变形驱动模块通过螺栓安装在底盘上,且变形驱动模块位于中部和后部的桨腿驱动模块之间,驱动控制系统通过螺栓固定安装在底盘的后部,外壳上盖和外壳下盖分别盖装在底盘上,外壳上盖和外壳下盖与底盘之间通过软密封防水密封。本发明用于陆地行走和水面或水下推进领域。
权利要求
1.一种桨腿式可变形水陆两栖六足机器人,其特征在于:它包括外壳上盖(1)、外壳下盖(2)、软密封(3)、三个桨腿驱动模块(4)、变形驱动模块(5)、电池(6)、驱动控制系统(7)和底盘(8),
三个桨腿驱动模块(4)通过螺栓固定在底盘(8)的前部、中部和后部,电池(6)通过螺栓安装在底盘(8)上,且电池(6)位于前部和中部的桨腿驱动模块(4)之间,变形驱动模块(5)通过螺栓安装在底盘(8)上,且变形驱动模块(5)位于中部和后部的桨腿驱动模块(4)之间,驱动控制系统(7)通过螺栓固定安装在底盘(8)的后部,外壳上盖(1)和外壳下盖(2)分别盖装在底盘(8)上,外壳上盖(1)和外壳下盖(2)与底盘(8)之间通过软密封(3)防水密封。
2.根据权利要求1的一种桨腿式可变形水陆两栖六足机器人,其特征在于:软密封(3)为橡胶防水密封垫。
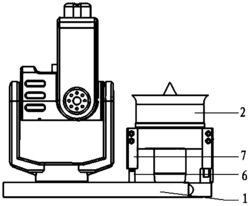
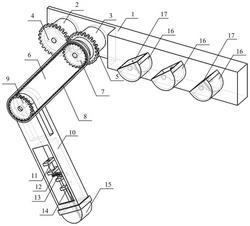
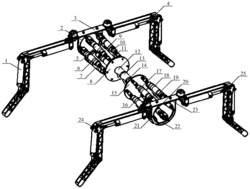
3.根据权利要求2的一种桨腿式可变形水陆两栖六足机器人,其特征在于:桨腿驱动模块(4)包括驱动电机模块(9)、双节万向联轴器(10)、支座(11)、摆杆(12)和桨腿(13),双节万向联轴器(10)的首、尾两节分别通过销钉卡簧连接在驱动电机模块(9)和桨腿(13)上,支座(11)和摆杆(12)安装在双节万向联轴器(10)的尾端,且支座(11)和摆杆(12)之间形成转动关节。
4.根据权利要求3的一种桨腿式可变形水陆两栖六足机器人,其特征在于:驱动电机模块(9)包括无刷电机(24)、减速器(25)、电机座(26)、输出轴(27)和滚动轴承(28),减速器(25)套装在无刷电机(24)上之后通过螺钉固定在电机座(26)上,输出轴(27)通过滚动轴承(28)转动安装在电机座(26)上,减速器(25)的输出轴与输出轴(27)之间通过键连接。
5.根据权利要求4的一种桨腿式可变形水陆两栖六足机器人,其特征在于:支座(11)包括支座基体(29)、支座石墨铜套(30)和支座端盖(31),支座基体(29)为槽形基座,支座基体(29)相对的侧端面上开设有通孔,每个通孔内内嵌有一个支座石墨铜套(30),支座端盖(31)通过螺栓安装在支座基体(29)上。
6.根据权利要求5的一种桨腿式可变形水陆两栖六足机器人,其特征在于:摆杆(12)包括摆杆基体(32)、摆杆石墨铜套(33)、摆杆端盖(34)和一对摆杆轴(35),摆杆石墨铜套(33)嵌套在摆杆基体(32)中,摆杆端盖(34)通过螺栓固定在摆杆基体(32)上,一对摆杆轴(35)嵌套在摆杆基体(32)中,摆杆轴(35)通过轴肩和轴端挡圈轴向定位,同时,通过键连接周向定位,实现摆杆轴(35)与摆杆基体(32)固连。
7.根据权利要求6的一种桨腿式可变形水陆两栖六足机器人,其特征在于:桨腿(13)包括锥帽(36)、内嵌梁(38)、固定螺钉、桨腿基体(37)和螺旋轴(39),桨腿基体(37)上设有螺旋榫,螺旋轴(39)上开设螺旋槽(39-1),螺旋轴(39)插装在桨腿基体(37)内并通过固定螺钉旋入螺旋轴(39)的螺孔内固定,内嵌梁(38)嵌入到桨腿基体(37)内,且内嵌梁(38)的一端伸入到螺旋槽(39-1)处,锥帽(36)安装在桨腿基体(37)的桨毂外部的圆台凸起上;桨腿基体(37)外形为C形螺旋桨叶,锥帽(36)和桨腿基体(37)均由柔性耐磨材料制成。
8.根据权利要求7的一种桨腿式可变形水陆两栖六足机器人,其特征在于:锥帽(36)和桨腿基体(37)均由热塑性聚氨酯橡胶材料制成。
9.根据权利要求8的一种桨腿式可变形水陆两栖六足机器人,其特征在于:内嵌梁(38)为C形刚条,三根C形刚条为一组内嵌梁(38),两组内嵌梁(38)分别嵌入到桨腿基体(37)的两个C形螺旋桨叶内。
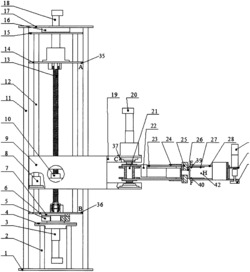
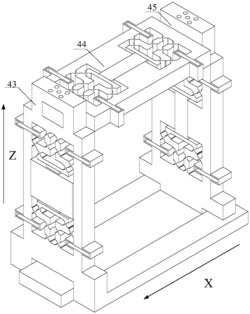
10.根据权利要求8的一种桨腿式可变形水陆两栖六足机器人,其特征在于:变形驱动模块(5)包括前后楔杆(14)、中间横梁(15)、驱动横梁(16)、一对滑杆(17)、滑杆石墨铜套(18)、舵机(19)、舵机座(20)、舵机摇杆(21)、连杆(22)和中间楔杆(23),
舵机(19)与舵机座(20)通过螺栓连接组成驱动舵机模块并通过螺栓固定在底盘(8)上,前后楔杆(14)、中间横梁(15)和中间楔杆(23)通过角铝和螺栓连接组成限位楔杆模块,横梁(16)、滑杆(17)、滑杆石墨铜套(18)、舵机摇杆(21)和连杆(22)通过销轴传动组成曲柄滑块机构,滑杆石墨铜套(18)通过螺栓固定在底盘(8)上,一对滑杆(17)可上下滑动套装入滑杆石墨铜套(18)内,驱动舵机模块通过曲柄滑块机构的传动实现限位楔杆模块在竖直方向上的升降。
说明书
技术领域
本发明涉及一种水陆两栖六足机器人,具体涉及一种桨腿式可变形水陆两栖六足机器人,是一种依靠桨腿驱动的,通过变换形态实现水、陆工作模式切换的水陆两栖六足机器人。
背景技术
随着人类在复杂环境下进行科学考察、资源勘探与开发、灾害救援与处理以及进行军事行动的需求与日俱增,能在复杂环境下运行的机器人的开发与应用成为重点研究领域之一。水陆两栖机器人能够在水、陆以及水陆过渡带中运行,其作为执行上述任务的载体具有非常大的发展潜力。当前国内外所研究的水陆两栖机器人多有局限,这些机器人大体可分为两种:一种是基于分离式的水、陆驱动机构,要么需要手动更换驱动机构,要么需要复杂的冗余驱动系统来完成水、陆驱动机构的自动切换,环境适应性低;另一种是基于复合式的水陆驱动机构,一般形状复杂制造困难,而且运行效率低、速度慢,很难同时满足陆地越障和水下推进的要求。
综上所述,现有的水陆两栖六足机器人结构冗余复杂、水陆模式切换难、低运行效率低、速度慢,难以同时满足陆地越障和水下推进要求的问题。
发明内容
本发明为了解决现有的水陆两栖六足机器人结构冗余复杂、水陆模式切换难、低运行效率低、速度慢,难以同时满足陆地越障和水下推进要求的问题。进而提供了一种桨腿式可变形水陆两栖六足机器人。
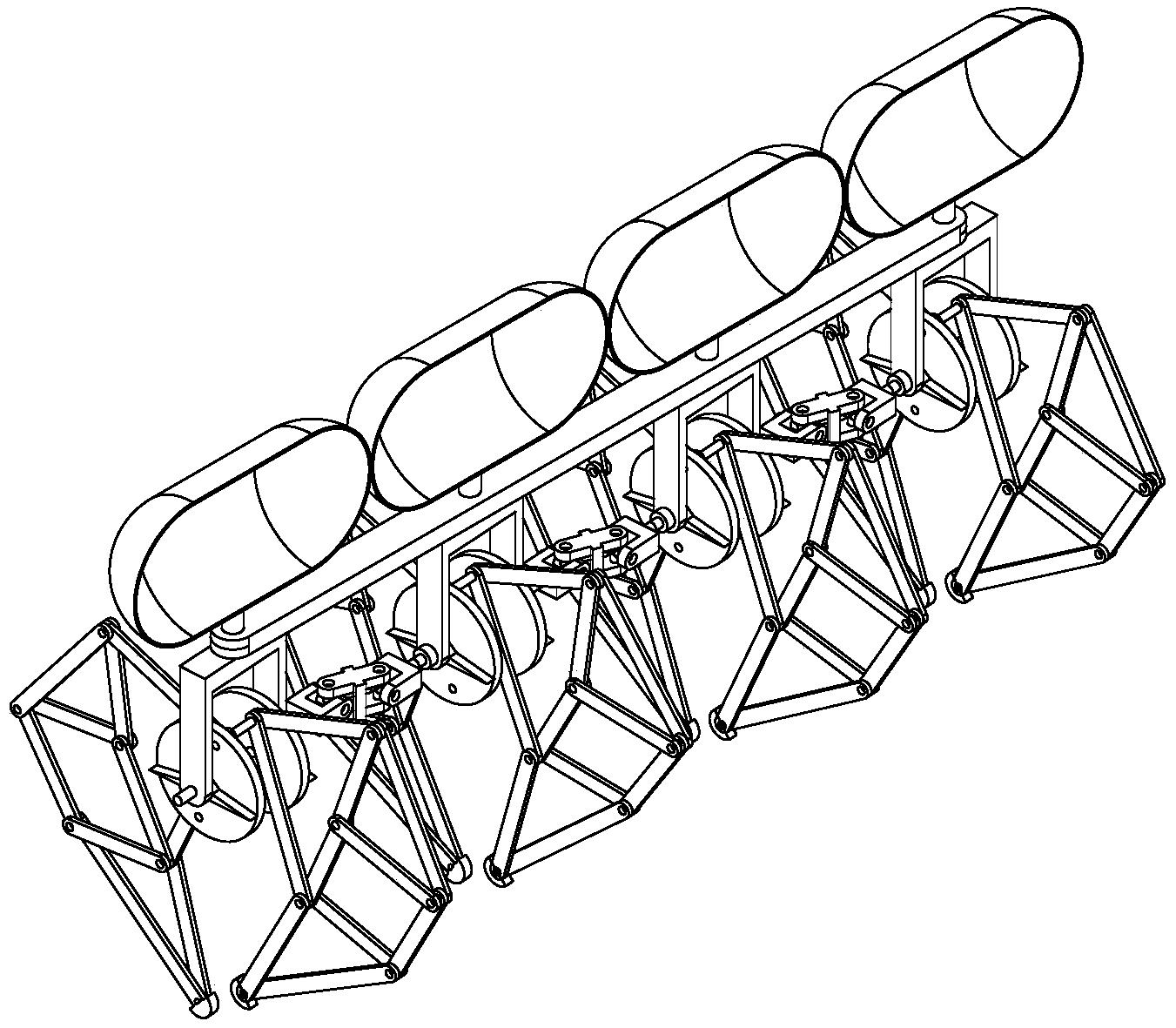
本发明的技术方案是一种桨腿式可变形水陆两栖六足机器人,包括外壳上盖、外壳下盖、软密封、三个桨腿驱动模块、变形驱动模块、电池、驱动控制系统和底盘,三个桨腿驱动模块通过螺栓固定在底盘的前部、中部和后部,电池通过螺栓安装在底盘上,且电池位于前部和中部的桨腿驱动模块之间,变形驱动模块通过螺栓安装在底盘上,且变形驱动模块位于中部和后部的桨腿驱动模块之间,驱动控制系统通过螺栓固定安装在底盘的后部,外壳上盖和外壳下盖分别盖装在底盘上,外壳上盖和外壳下盖与底盘之间通过软密封防水密封。
进一步地,软密封为橡胶防水密封垫。
进一步地,桨腿驱动模块包括驱动电机模块、双节万向联轴器、支座、摆杆和桨腿,双节万向联轴器的首、尾两节分别通过销钉卡簧连接在驱动电机模块和桨腿上,支座和摆杆安装在双节万向联轴器的尾端,且支座和摆杆之间形成转动关节。
进一步地,驱动电机模块包括无刷电机、减速器、电机座、输出轴和滚动轴承,减速器套装在无刷电机上之后通过螺钉固定在电机座上,输出轴通过滚动轴承转动安装在电机座上,减速器的输出轴与输出轴之间通过键连接。
进一步地,支座包括支座基体、支座石墨铜套和支座端盖,支座基体为槽形基座,支座基体相对的侧端面上开设有通孔,每个通孔内内嵌有一个支座石墨铜套,支座端盖通过螺栓安装在支座基体上。
进一步地,摆杆包括摆杆基体、摆杆石墨铜套、摆杆端盖和一对摆杆轴,摆杆石墨铜套嵌套在摆杆基体中,摆杆端盖通过螺栓固定在摆杆基体上,一对摆杆轴嵌套在摆杆基体中,摆杆轴通过轴肩和轴端挡圈轴向定位,同时,通过键连接周向定位,实现摆杆轴与摆杆基体固连。
进一步地,桨腿包括锥帽、内嵌梁、固定螺钉、桨腿基体和螺旋轴,桨腿基体上设有螺旋榫,螺旋轴上开设螺旋槽,螺旋轴插装在桨腿基体内并通过固定螺钉旋入螺旋轴的螺孔内固定,内嵌梁嵌入到桨腿基体内,且内嵌梁的一端伸入到螺旋槽处,锥帽安装在桨腿基体的桨毂外部的圆台凸起上;桨腿基体外形为C形螺旋桨叶,锥帽和桨腿基体均由柔性耐磨材料制成。
进一步地,锥帽和桨腿基体均由热塑性聚氨酯橡胶材料制成。
进一步地,内嵌梁为C形刚条,三根C形刚条为一组内嵌梁,两组内嵌梁分别嵌入到桨腿基体的两个C形螺旋桨叶内。
进一步地,变形驱动模块包括前后楔杆、中间横梁、驱动横梁、一对滑杆、滑杆石墨铜套、舵机、舵机座、舵机摇杆、连杆和中间楔杆,舵机与舵机座通过螺栓连接组成驱动舵机模块并通过螺栓固定在底盘上,前后楔杆、中间横梁和中间楔杆通过角铝和螺栓连接组成限位楔杆模块,横梁、滑杆、滑杆石墨铜套、舵机摇杆和连杆通过销轴传动组成曲柄滑块机构,滑杆石墨铜套通过螺栓固定在底盘上,一对滑杆可上下滑动套装入滑杆石墨铜套内,驱动舵机模块通过曲柄滑块机构的传动实现限位楔杆模块在竖直方向上的升降。
本发明与现有技术相比具有以下改进效果:
本发明采用柔顺性桨腿复合驱动机构,桨腿由高弹性的基体和高刚性的内嵌梁构成,可根据执行任务区域的地形更换内嵌梁的材料调节桨腿的整体刚度以获得合适的柔顺性,其沿轴向驱动即可作为在水下螺旋桨式推进器,沿周向驱动即可作为陆上柔顺腿式驱动机构,可以同时满足陆地越障和水下推进的要求,环境适应性强;
本发明重心位于浮心的正下方,在水中具有向上稳定性,一旦偏离正常水平姿态,机器人所受重力和浮力即立刻形成一对与偏移方向相反的力偶,使机器人具有恢复原有姿态的趋势,增强机器人在水中姿态平稳,抗波浪扰动能力强;
本发明采用楔杆限位、自重复位的变形机构,由碳纤维板材零件拼接而成,结构简单,依靠大扭力舵机通过曲柄滑块机构驱动变形机构在上下两极限位置间运动,行程小,水陆模式切换快速,切换时间不超过0.5s;
本发明所述机器人采用高功率密度的盘式无刷直流电机和适配的减速器,使其陆上平地行进速度(m/s)/体长(m)比值最高可达5.19,水中推进速度(m/s)/体长(m)比值最高可达0.5,翻越垂直障碍高度可达25cm,攀爬纵坡坡度可达32°。
本发明依靠桨腿进行驱动的、依靠自动变形机构切换水下旋桨推进模式和陆地腿式行进模式的水陆两栖六足机器人,解决了现有水陆两栖六足机器人结构冗余复杂、水陆模式切换难、低运行效率低、速度慢,难以同时满足陆地越障和水下推进要求的问题,为复杂环境下执行科考、勘探、救灾、侦察等多种任务提供一种有效的高技术手段。
附图说明
图1为本发明的外形图;图2为本发明的结构原理图;图3为本发明中桨腿驱动模块的结构示意图;图4为本发明中变形驱动模块的结构示意图;图5为本发明中电机驱动模块的结构示意图;图6为本发明中支座的结构示意图;图7为本发明中摆杆的结构示意图;图8为本发明中桨腿的结构示意图;图9是图8的轴测图;图10为本发明陆上直线运动实现原理图;图11为本发明陆上转向运动实现原理图;图12为本发明水中直线运动实现原理图;图13为本发明水中转向运动实现原理图;
具体实施方式
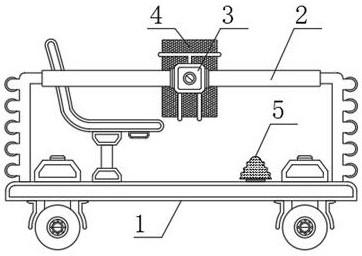
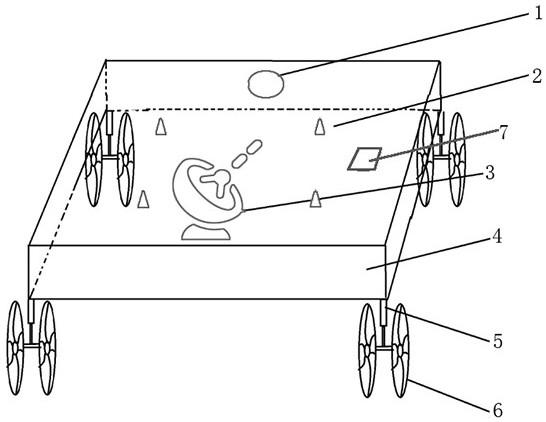
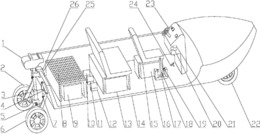
具体实施方式一:结合图1至图13说明本实施方式,一种桨腿式可变形水陆两栖六足机器人包括外壳上盖1、外壳下盖2、软密封3、三个桨腿驱动模块4、变形驱动模块5、电池6、驱动控制系统7和底盘8,三个桨腿驱动模块4通过螺栓固定在底盘8的前部、中部和后部,电池6通过螺栓安装在底盘8上,且电池6位于前部和中部的桨腿驱动模块4之间,变形驱动模块5通过螺栓安装在底盘8上,且变形驱动模块5位于中部和后部的桨腿驱动模块4之间,驱动控制系统7通过螺栓固定安装在底盘8的后部,外壳上盖1和外壳下盖2分别盖装在底盘8上,外壳上盖1和外壳下盖2与底盘8之间通过软密封3防水密封。
本实施方式的取长补短,结合两类驱动机构的优点,开发研制出具有结构简单、运行效率高、环境适应性强且能在陆地快速越障和在水中快速推进的驱动机构的水陆两栖机器人便成为了重要的研究方向和发展趋势之一。
本实施方式的外壳上盖与外壳下盖安装在底盘上后可共同形成流线型外形,减小在水中的推进阻力;外壳上盖上设计有贯通舱,减小了机器人的排开水体积,使桨腿能够完全浸没于水中,发挥最大推进能力;贯通舱各处在竖直方向上的高度自几何中心向四周下降,使机器人上岸后不会在贯通舱内存水;所述软密封为外壳上、下盖与摆杆间柔性的防水密封布,既能实现防水密封又不干扰摆杆带动桨腿摆动。
本实施方式的桨腿是一种外形上为螺旋桨与C形腿复合的,力学性能上具有柔顺性、可人为调节刚度的推进机构,水中可作为螺旋桨推进,陆上可作为柔顺性腿行进,其柔顺性使其在不同地形上相应地有不同的接触点和接触角,输出转矩要求更低,因此能够更高效地在复杂地形中翻越障碍。
具体实施方式二:结合图1说明本实施方式,本实施方式的软密封3为橡胶防水密封垫。如此设置,便于适用于水下工作。其它组成和连接关系与具体实施方式一相同。
具体实施方式三:结合图3说明本实施方式,本实施方式的桨腿驱动模块4包括驱动电机模块9、双节万向联轴器10、支座11、摆杆12和桨腿13,双节万向联轴器10的首、尾两节分别通过销钉卡簧连接在驱动电机模块9和桨腿13上,支座11和摆杆12安装在双节万向联轴器10的尾端,且支座11和摆杆12之间形成转动关节。如此设置,每对驱动电机模块交错布置,双节万向联轴器的首、尾两节分别连接在驱动电机模块和桨腿上,使驱动电机模块能将转矩传递给桨腿;陆地模式下,从水平面上看双节万向联轴器的首、尾两节的轴线互相平行,中间传动轴的轴线则均与首、尾两节轴线互成30°角,使得一对桨腿驱动模块中的桨腿轴线得以共线;支座与摆杆形成一转动关节,其转动轴在竖直面上,与水平面成45°角,这样地面对机器人的支持力可以产生使摆杆摆回水平朝向的分量,二者之间套装一扭簧,在其扭力作用下,摆杆自然摆至极限位置,即摆杆与支座间的机械限位位置,其轴线朝向后下方,与水平朝向位置处的轴线成25°角,摆杆尾部有一限位凸起,起到对变形驱动模块限位的作用;双节万向联轴器的尾节经由石墨铜套套装在摆杆上,尾节轴与中间传动轴的交点、摆杆轴与支座轴的交点重合于一处,因此摆杆的摆动也同时带动桨腿进行摆动同时不影响驱动电机模块将转矩正常向桨腿传递;其它组成和连接关系与具体实施方式一或二相同。
具体实施方式四:结合图5说明本实施方式,本实施方式的驱动电机模块9包括无刷电机24、减速器25、电机座26、输出轴27和滚动轴承28,减速器25套装在无刷电机24上之后通过螺钉固定在电机座26上,输出轴27通过滚动轴承28转动安装在电机座26上,减速器25的输出轴与输出轴27之间通过键连接。如此设置,便于提供动力。其它组成和连接关系与具体实施方式一、二或三相同。
具体实施方式五:结合图6说明本实施方式,本实施方式的支座11包括支座基体29、支座石墨铜套30和支座端盖31,支座基体29为槽形基座,支座基体29相对的侧端面上开设有通孔,每个通孔内内嵌有一个支座石墨铜套30,支座端盖31通过螺栓安装在支座基体29上。如此设置,便于与摆杆12配合转动和限位。其它组成和连接关系与具体实施方式一、二、三或四相同。
具体实施方式六:结合图7说明本实施方式,本实施方式的摆杆12包括摆杆基体32、摆杆石墨铜套33、摆杆端盖34和一对摆杆轴35,摆杆石墨铜套33嵌套在摆杆基体32中,摆杆端盖34通过螺栓固定在摆杆基体32上,一对摆杆轴35嵌套在摆杆基体32中,摆杆轴35通过轴肩和轴端挡圈轴向定位,同时,通过键连接周向定位,实现摆杆轴35与摆杆基体32固连。如此设置,便于与支座11配合转动和限位。其它组成和连接关系与具体实施方式一、二、三、四或五相同。
具体实施方式七:结合图8至图9说明本实施方式,本实施方式的桨腿13包括锥帽36、内嵌梁38、固定螺钉、桨腿基体37和螺旋轴39,桨腿基体37上设有螺旋榫,螺旋轴39上开设螺旋槽39-1,螺旋轴39插装在桨腿基体37内并通过固定螺钉旋入螺旋轴39的螺孔内固定,内嵌梁38嵌入到桨腿基体37内,且内嵌梁38的一端伸入到螺旋槽39-1处,锥帽36安装在桨腿基体37的桨毂外部的圆台凸起上;桨腿基体37外形为C形螺旋桨叶,锥帽36和桨腿基体37均由柔性耐磨材料制成。如此设置,桨腿是一种外形上为螺旋桨与C形腿复合的,力学性能上具有柔顺性、可人为调节刚度的推进机构,水中可作为螺旋桨推进,陆上可作为柔顺性腿行进,其柔顺性使其在不同地形上相应地有不同的接触点和接触角,输出转矩要求更低,因此能够更高效地在复杂地形中翻越障碍。其它组成和连接关系与具体实施方式一、二、三或四相同。
具体实施方式八:结合图3说明本实施方式,本实施方式的锥帽36和桨腿基体37均由热塑性聚氨酯橡胶材料制成。如此设置,柔性很大且十分耐磨,适于在陆地上行走、翻越障碍,能长时间承受地面磨损,使用寿命较长,桨腿基体A-4可通过熔融沉积方式3D打印制成,也可利用螺旋面作为分模面分为两半,使用模具覆模制成,锥帽A-1也可由熔融沉积方式3D打印和直接模具覆模制成。其它组成和连接关系与具体实施方式一至七任意一项相同。
具体实施方式九:结合图3说明本实施方式,本实施方式的内嵌梁38为C形刚条,三根C形刚条为一组内嵌梁38,两组内嵌梁38分别嵌入到桨腿基体37的两个C形螺旋桨叶内。如此设置,安装方便。其它组成和连接关系与具体实施方式一至七任意一项相同。
桨腿13的工作原理为:在陆上运动模式下,桨腿轴线与运动方向垂直,桨腿作为柔顺性腿在陆地上行进、翻越障碍,其柔顺性使其在不同地形上相应地有不同的接触点和接触角,输出转矩要求更低,因此能够更高效地在复杂地形上行进;在水中运行模式下,桨腿轴线与运动方向平行,桨腿作为螺旋桨,在水中推进,其机翼形的桨叶切面使其由更高的推进效率。
本实施方式的桨腿13是一种外形上为螺旋桨与C形腿复合的,力学性能上具有柔顺性、可人为调节刚度的推进机构,由锥帽36,桨腿基体37,内嵌梁38和螺旋轴39组成,桨腿基体37的桨毂处突出有螺旋榫,可旋入螺旋轴39的螺旋槽内,锥帽36通过楔入桨腿基体37桨毂外部的圆台凸起而固定在桨腿基体37上,刚性材料的内嵌梁38嵌入到柔性材料的桨腿基体37内,且刚好不伸出毂处突出的螺旋榫之外,使得螺旋轴39可将转矩传递给内嵌梁38,通过更换内嵌梁38的材料则可以调节桨腿13的整体刚度,获得合适的柔顺性,桨腿13作为一种复合推进机构,在水中可作为螺旋桨推进,陆上可作为柔顺性腿行进,其柔顺性使其在不同地形上相应地有不同的接触点和接触角,输出转矩要求更低,因此能够更高效地在复杂地形中翻越障碍。
本实施方式的内嵌梁可由包括ABS、聚甲醛树脂(POM)、玻璃纤维增强树脂(GFRP)、碳纤维增强树脂(CFRP)和弹簧钢在内的多种材料通过3D打印或机加工制成,具有较大的刚度,可以嵌入到桨腿基体内部的安装槽内,可根据执行任务区域的地形更换内嵌梁的材料调节桨腿的整体刚度以获得合适的柔顺性。
本实施方式的螺旋轴由45号钢数控加工制成,正火热处理提高韧性,其上设计有有螺旋槽,桨腿基体的桨毂处突出有螺旋榫,可旋入螺旋轴的螺旋槽内,而内嵌梁嵌入到桨腿基体内后也深入至螺旋榫处且刚好不伸出螺旋榫之外,使得螺旋轴可将转矩传递给相较桨腿基体刚性更高的内嵌梁;螺旋轴旋入桨腿基体后被固定螺钉旋入轴端的螺孔内而得以轴向固定,锥帽可通过楔入桨腿基体的桨毂外部的圆台凸起而固定在桨腿基体上,形成螺旋桨的尾椎。
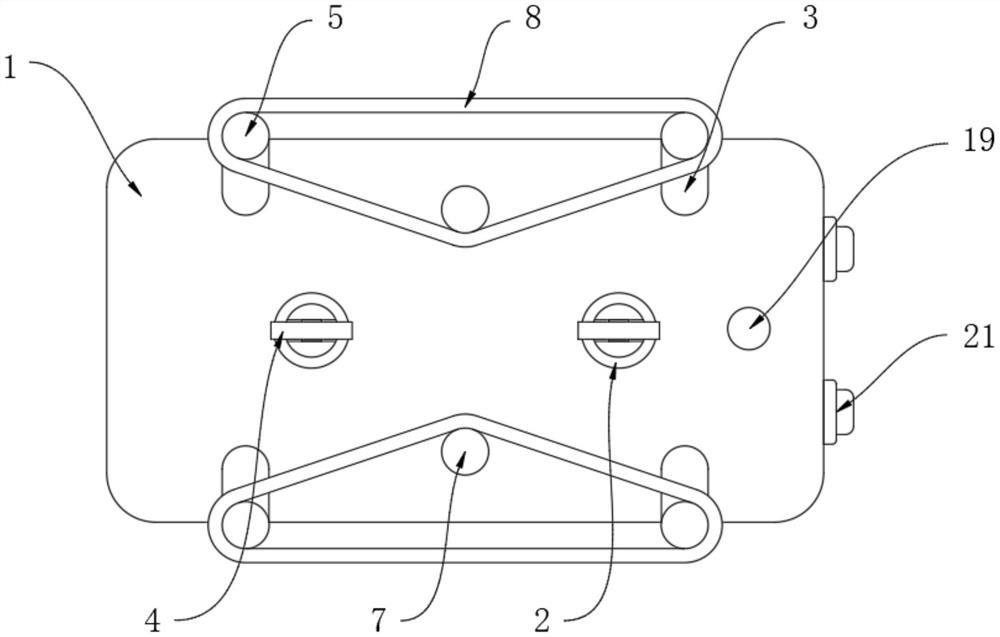
具体实施方式十:结合图3说明本实施方式,本实施方式的变形驱动模块5包括前后楔杆14、中间横梁15、驱动横梁16、一对滑杆17、滑杆石墨铜套18、舵机19、舵机座20、舵机摇杆21、连杆22和中间楔杆23,舵机19与舵机座20通过螺栓连接组成驱动舵机模块并通过螺栓固定在底盘8上,前后楔杆14、中间横梁15和中间楔杆23通过角铝和螺栓连接组成限位楔杆模块,横梁16、滑杆17、滑杆石墨铜套18、舵机摇杆21和连杆22通过销轴传动组成曲柄滑块机构,滑杆石墨铜套18通过螺栓固定在底盘8上,一对滑杆17可上下滑动套装入滑杆石墨铜套18内,驱动舵机模块通过曲柄滑块机构的传动实现限位楔杆模块在竖直方向上的升降。如此设置,所述变形驱动模块由水浸传感器、驱动舵机模块、曲柄滑块机构和限位楔杆组成,驱动舵机模块可通过曲柄滑块机构实现限位楔杆在竖直方向上的升降;在水中模式下,水浸传感器遇水控制驱动舵机模块将限位楔杆抬起,桨腿驱动模块中摆杆的限位凸起与限位楔杆间形成的机械限位消失,摆杆在扭簧扭力作用下摆至极限位置,其轴线指向后下方,亦即桨腿轴线指向后下方,桨腿可作为螺旋桨旋转使得机器人能够在水中推进;在陆地模式下,由于地面对机器人的支持力可以产生使摆杆摆回水平朝向的分量,因此机器人上岸过程中可依靠自重克服扭簧扭力,使摆杆回归水平朝向的位置,桨腿可作为柔顺性腿在陆地上行进、翻越障碍,水浸传感器离水,控制驱动舵机模块将限位楔杆放下,摆杆与限位楔杆之间重新形成限位,即使在腾空状态下也不会自行变换形态摆向后下方朝向的位置。其它组成和连接关系与具体实施方式一至七任意一项相同。
结合图1至图13说明本发明的工作原理:
如图1-2所示,本发明包括外壳上盖1、外壳下盖2、软密封3、桨腿驱动模块4、变形驱动模块5、电池6、驱动控制系统7和底盘8,在底盘8前、中、后处分别有3对桨腿驱动模块4通过螺栓固定于其上,在前、中两对桨腿驱动模块4之间的位置处,电池6通过螺栓固定在底盘8的前部安装槽口上;在中、后两对桨腿驱动模块4之间的位置处,变形驱动模块5通过螺栓固定在底盘8上、驱动控制系统7通过螺栓固定在底盘8的后部安装槽口上,外壳上盖1和外壳下盖2分别从上下两侧安装到底盘8上,将其夹持与中间,外壳上盖1和外壳下盖2分别与底盘8之间垫有橡胶防水密封垫,6具软密封3则套装在外壳上盖1、外壳下盖2形成的6处端口与3对桨腿驱动模块5之间,一端通过螺钉和垫片压紧在上述端口上,另一端通过摆杆端盖34压紧在摆杆基体32上,实现柔性防水密封。
本发明中桨腿驱动模块4由驱动电机模块9、双节万向联轴器10、支座11、摆杆12和桨腿13组成,驱动电机模9块包括无刷电机24,减速器25,电机座26,输出轴27和滚动轴承28,减速器25套装在无刷电机24上后通过螺钉固定在电机座26上,输出轴27通过滚动轴承28安装在电机座26上,减速器25的轴与输出轴27之间通过键连接传动,其中无刷电机24为市购产品,购置于Maxon Motor Online Shop,型号为EC60 flat 200W,减速器25购置于Maxon Motor Online Shop,型号为GP25 C 1:19,碍于空间尺寸,每对驱动电机模块5交错布置在底盘8上,双节万向联轴器10为市购产品,购置于绍兴市上虞蓝鼎商贸有限公司、型号为05GD,其首、尾两节分别通过销钉卡簧连接在驱动电机模块9和桨腿13上,使驱动电机模块9能将转矩专递给桨腿13;陆地模式下,从水平面上看前后两对双节万向联轴器10的首、尾两节的轴线互相平行,中间传动轴的轴线则均与首、尾两节轴线互成30°角,中间一对双节万向联轴器10则互成23.5°角,由此可使一对桨腿驱动模块4中的桨腿13轴线得以共线。
本发明中外壳上盖1与外壳下盖2安装在底盘8上后可共同形成流线型外形,减小在水中的推进阻力;外壳上盖1上设计有贯通舱,减小了机器人的排开水体积,使桨腿13能够完全浸没于水中(但机器人整体仍浮于水面),以发挥最大推进能力;贯通舱各处在竖直方向上的高度自几何中心向四周下降,使机器人上岸后不会在贯通舱内存水;所述软密封3为外壳上盖1、外壳下盖2与摆杆12间柔性的防水密封布,既能实现防水密封又不干扰摆杆带动桨腿摆动;机器人的重心设计于浮心的正下方,在水中具有向上稳定性,可加强机器人在水中的姿态平稳,由较强的抗波浪扰动能力;
本发明中支座11由支座基体29,支座石墨铜套30,和支座端盖31组成,一对支座石墨铜套30嵌套支座基体29中,同时一对支座端盖31通过螺栓固定支座基体29上,对座石墨铜套30轴向限位;摆杆12由摆杆基体32,摆杆石墨铜套33,摆杆端盖34和摆杆轴35组成,摆杆石墨铜套33嵌套在摆杆基体32中,摆杆端盖34通过螺栓固定在摆杆基体32上,对摆杆石墨铜套33轴向限位,一对摆杆轴35嵌套在摆杆基体32中,通过轴肩和轴端挡圈轴向定位,通过键连接周向定位,由此摆杆轴35便与摆杆基体32固连;支座11与摆杆12形成一转动关节,其转动轴在竖直面上,与水平面成45°角,这样地面对机器人的支持力可以产生使摆杆12摆回水平朝向的分量,支座11与摆杆12之间套装一扭簧,在其扭力作用下,摆杆12自然摆至极限位置,即摆杆12与支座11间的机械限位位置,此时其轴线朝向后下方,与水平朝向位置处的轴线成25°角,摆杆12尾部有一限位凸起,起到对变形驱动模块5限位的作用;双节万向联轴器10的尾节经由摆杆石墨铜套33可旋转地套装在摆杆12上,尾节轴线与中间传动轴轴线的交点、摆杆石墨铜套33轴线与摆杆轴35轴线的交点重合于一处,因此摆杆12的摆动也同时带动桨腿13进行摆动同时不影响驱动电机模块9将转矩正常向桨腿13传递,其中支座石墨铜套30和摆杆石墨铜套33均为同一种市购产品,购置于嘉兴众驰新材料科技有限公司、型号为MPTZ 16-15。
本发明中桨腿13是一种外形上为螺旋桨与C形腿复合的,力学性能上具有柔顺性、可人为调节刚度的推进机构,由锥帽36,桨腿基体37,内嵌梁38和螺旋轴39组成,桨腿基体37的桨毂处突出有螺旋榫,可旋入螺旋轴39的螺旋槽内,锥帽36通过楔入桨腿基体37桨毂外部的圆台凸起而固定在桨腿基体37上,刚性材料的内嵌梁38嵌入到柔性材料的桨腿基体37内,且刚好不伸出毂处突出的螺旋榫之外,使得螺旋轴39可将转矩传递给内嵌梁38,通过更换内嵌梁38的材料则可以调节桨腿13的整体刚度,获得合适的柔顺性,桨腿13作为一种复合推进机构,在水中可作为螺旋桨推进,陆上可作为柔顺性腿行进,其柔顺性使其在不同地形上相应地有不同的接触点和接触角,输出转矩要求更低,因此能够更高效地在复杂地形中翻越障碍。
本发明中变形驱动模块5由前后楔杆14,中间横梁15,驱动横梁16,滑杆17,滑杆石墨铜套18,舵机19,舵机座20,舵机摇杆21,连杆22和中间楔杆23组成,舵机19与舵机座20通过螺栓连接组成驱动舵机模块并同样通过螺栓固定在底盘8上,前后楔杆14,中间横梁15和中间楔杆23通过角铝和螺栓连接组成限位楔杆模块,横梁16,滑杆17,滑杆石墨铜套18,舵机摇杆21和连杆22通过销轴传动组成曲柄滑块机构,滑杆石墨铜套18通过螺栓固定在底盘8上,一对滑杆17则可上下滑动地套装入滑杆石墨铜套18内,则驱动舵机模块可通过曲柄滑块机构的传动实现限位楔杆模块在竖直方向上的升降。
本发明中的水陆两栖机器人可实现复杂两栖环境下的陆地行进、越障和水中推进两种运动模式。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
一种桨腿式可变形水陆两栖六足机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0