







专利摘要
本申请公开了一种用于白光中子源带电粒子探测谱仪的角度旋转机构。本申请用于白光中子源带电粒子探测谱仪的角度旋转机构,包括旋转器和驱动电机;旋转器用于伸入真空腔体内部,并作为承载探测器的平台,旋转器与真空腔体之间采用磁流体密封;驱动电机安装于真空腔体外面,驱动电机的活动端与旋转器相连,用于驱动旋转器转动。本申请用于白光中子源带电粒子探测谱仪的角度旋转机构,采用磁流体密封,不仅实现了在真空环境下的探测器角度调节,而且能够在辐照环境下正常工作,能够在线进行角度调整,满足不同角度测量的使用需求,极大的方便了白光中子源带电粒子探测谱仪的使用。
权利要求
1.一种用于白光中子源带电粒子探测谱仪的角度旋转机构,其特征在于:包括旋转器(32)、驱动电机(33)和减速器;
所述旋转器(32)用于伸入真空腔体(1)内部,并作为承载探测器(0)的平台,所述旋转器(32)与真空腔体(1)之间采用磁流体密封;
所述驱动电机(33)安装于真空腔体(1)外面,驱动电机(33)的活动端与所述旋转器(32)相连,用于驱动所述旋转器(32)转动;
所述旋转器(32)的表面设置有旋转盘(31),所述旋转盘(31)上设置有若干刻度,用于标记旋转的角度;
所述旋转盘(31)为圆盘,圆盘表面开设有若干沿着直径延伸的圆心中心对称的凹槽,凹槽将圆盘平均分割成若干等分的圆弧,用于标记旋转角度;
所述凹槽由三十六组长阶梯槽(311)和三十六组短阶梯槽(312)组成,长阶梯槽(311)和短阶梯槽(312)均匀间隔设置,两个长阶梯槽(311)之间的间隔为10°,两个短阶梯槽(312)之间的间隔也为10°;
所述旋转器(32)采用磁流体密封后,其漏率少于10
所述减速器设置于所述驱动电机(33)和旋转器(32)之间,用于匹配驱动电机(33)和旋转器(32)的转动惯量。
说明书
技术领域
本申请涉及中子检测领域,特别是涉及一种用于白光中子源带电粒子探测谱仪的角度旋转机构。
背景技术
白光中子源是一个极其有用的核数据测量研究工具,可以为新型核能设施设计、核天体物理研究、基础物理科学以及国防科技等领域提供关键核数据。核数据测量研究在国际上已开展近八十年,经历了单能点中子源、共振区白光中子源、快白光中子源核数据测量几个阶段。1960年代以前主要利用低能加速器通过d-D、d-T、p-T和p-7Li等反应产生具有一定强度的单能中子进行中子反应截面的测量工作。1960年代开始基于强流电子直线加速器的白光中子源相继在美国、前苏联、欧洲和日本等国建成。白光中子源能在1eV-1MeV的共振中子能区提供很强的连续谱中子,其中,代表性的装置有美国ORNL国家实验室的ORELA和欧洲位于比利时Geel的JRC/IRMM实验室的GELINA。1980年代之后基于强流高能量质子加速器的白光中子源由于其脉冲中子强度高、中子能谱范围广等优势逐步取代了基于电子直线加速器的白光中子源,成为核数据测量的最有力工具。这方面的代表装置是美国LANL的基于800MeV质子加速器 (缩写LANSCE)建立的核数据测量装置,以及欧洲CERN的基于20GeV的质子同步加速器(缩写PS)建立的核数据测量装置(缩写n-TOF)。
LANL设有共振中子靶站(Lujan Center,Target-1)和快中子靶站(WNR, Target-4)。在Lujan Center和WNR上已分别建设了多条白光中子束线,并建立了包括测量中子辐射俘获截面的大型g探测器设备DANCE和中子探测器阵列 FIGARO等在内很多台谱仪,它们在共振中子、快中子以及中高能中子能区测量了大量至关重要的核数据。日本则在位于Tokai的J-PARC大型质子加速器上利用3GeV散裂中子源靶站上慢化的中子建设了一个核数据测量束线ANNRI。
国内目前用于核数据测量的中子源主要有中国原子能科学研究院的中国先进研究堆(缩写CARR堆)和13MV串列加速器(缩写5SDH-2)、北京大学的 4.5MV静电加速器、兰州大学的300kV中子发生器等。这些中子源的能量范围在0.01~42MeV之间,它们对中国的核数据研究包括中国自己的CENDL核数据评价库做出了重要贡献,但是它们的能量并不连续,各个加速器可分别提供部分能量片段的中子束,且束流强度较低。随着我国先进核能技术、基础核物理、核天体物理以及国防建设等发展的需要,迫切需要一台能区宽、强度高的白光中子源装置以满足全方面核数据测量的要求。
带电粒子探测谱仪(缩写LPDA)位于白光中子源的终端处,是中国散裂中子源首批投入运行的4台谱仪之一,用于测试中子引起的出射带电粒子的数据,主要包括p、d、t、3He和4He等轻带电粒子。这类数据对新一代核能,例如第四代反应堆、ADS等,的研发尤为重要,涉及到中子探测、辐射防护与检测、反应堆控制与运行等多个方面;同时,也对强子治疗提供重要的支持。
LPDA包括真空靶室和带电粒子探测器。其中真空靶室是机、电、真空和气一体化设备,给带电粒子探测器提供实验环境。因此,真空靶室集成度非常高,是一个多功能的真空腔体。带电粒子探测谱仪的真空靶室是带电粒子探测的基础保障。现有的带电粒子探测谱仪中,带电粒子探测器是固定安装的,其角度都是预设好的,不能随意改变,如果需要改变探测器角度,则需要打开真空腔体,人工调整后再重新装载,操作繁琐,且工作效率低。
发明内容
本申请的目的是提供一种结构改进的用于白光中子源带电粒子探测谱仪的角度旋转机构。
本申请采用了以下技术方案:
本申请公开了一种用于白光中子源带电粒子探测谱仪的角度旋转机构,包括旋转器和驱动电机;旋转器用于伸入真空腔体内部,并作为承载探测器的平台,旋转器与真空腔体之间采用磁流体密封;驱动电机安装于真空腔体外面,驱动电机的活动端与旋转器相连,用于驱动旋转器转动。
需要说明的是,本申请的角度旋转机构采用磁流体密封,实现了真空下探测器的角度调节,并且能够在辐照环境下正常工作,极大的方便了白光中子源带电粒子探测谱仪的使用,能够满足不同角度的测量使用需求。
优选的,旋转器的表面设置有旋转盘,旋转盘上设置有若干刻度,用于标记旋转的角度。
需要说明的是,旋转盘的作用是标记刻度,使得旋转的角度定量可控,方便角度的调整。在本申请的一种实现方式中,旋转盘为圆盘,圆盘表面开设有若干沿着直径延伸的圆心中心对称的凹槽,凹槽将圆盘平均分割成若干等分的圆弧,用于标记旋转角度。可以理解,圆盘是最优的标记方案,当然也不排除采用其它特殊形状或结构的旋转盘,以满足不同的设计或使用需求。在申请的一种实现方式中,具体的,旋转盘上的凹槽由三十六组长阶梯槽和三十六组短阶梯槽组成,长阶梯槽和短阶梯槽均匀间隔设置,两个长阶梯槽之间的间隔为 10°,两个短阶梯槽之间的间隔也为10°。需要说明的是,长阶梯槽和短阶梯槽均匀间隔设置,长阶梯槽和短阶梯槽之间间隔5°,可以实现旋转盘正负5°的准确调整。
优选的,旋转器采用磁流体密封后,其磁流体密封件的漏率少于10
本申请的一种实现方式中,旋转器的转速少于10转每分钟,安装方向为垂直向下。
优选的,本申请的角度旋转机构还包括减速器,减速器设置于驱动电机和旋转器之间,用于匹配驱动电机和旋转器的转动惯量。
需要说明的是,本申请的旋转盘的转动惯量接近3Kg.m
优选的,本申请的角度旋转机构中,所有设置于真空腔体内部的组件,都采用耐辐照材料。
可以理解,真空腔体内必然会受到辐照影响,为了确保角度旋转机构正常运行,也为了确保其使用寿命,本申请优选的方案中,将角度旋转机构设置于真空腔体内部的组件都采用耐辐照材料。
本申请的有益效果在于:
本申请用于白光中子源带电粒子探测谱仪的角度旋转机构,采用磁流体密封,不仅实现了在真空环境下的探测器角度调节,而且能够在辐照环境下正常工作,能够在线进行角度调整,满足不同角度测量的使用需求,极大的方便了白光中子源带电粒子探测谱仪的使用。
附图说明
图1是本申请实施例中白光中子源带电粒子探测谱仪真空靶室的结构框图;
图2是本申请实施例中白光中子源带电粒子探测谱仪真空靶室的机械系统及相关组件的结构框图;
图3是本申请实施例中白光中子源带电粒子探测谱仪真空靶室的实物立体结构示意图;
图4是本申请实施例中白光中子源带电粒子探测谱仪真空靶室的内部结构剖视图;
图5是本申请实施例中白光中子源带电粒子探测谱仪真空靶室的侧面结构示意图;
图6是本申请实施例中白光中子源带电粒子探测谱仪真空靶室的真空腔体的结构示意图;
图7是本申请实施例中白光中子源带电粒子探测谱仪真空靶室的支撑架的结构示意图;
图8是本申请实施例中白光中子源带电粒子探测谱仪真空靶室的样品换样器的结构示意图;
图9是本申请实施例中样品换样器的样品架的结构示意图;
图10是本申请实施例中角度旋转机构与真空靶室配合的结构示意图;
图11是本申请实施例中角度旋转机构的旋转盘的表面刻度结构示意图;
图12是本申请实施例中白光中子源带电粒子探测谱仪真空靶室的控制系统的结构框图。
具体实施方式
下面通过具体实施例对本申请作进一步详细说明。以下实施例仅对本申请进行进一步说明,不应理解为对本申请的限制。
实施例
本例用于白光中子源带电粒子探测谱仪的角度旋转机构,其主要是安装于真空靶室内,用于对其中的带电粒子探测器进行角度调整,因此,本例对整个真空靶室进行了详细的说明,具体如下:
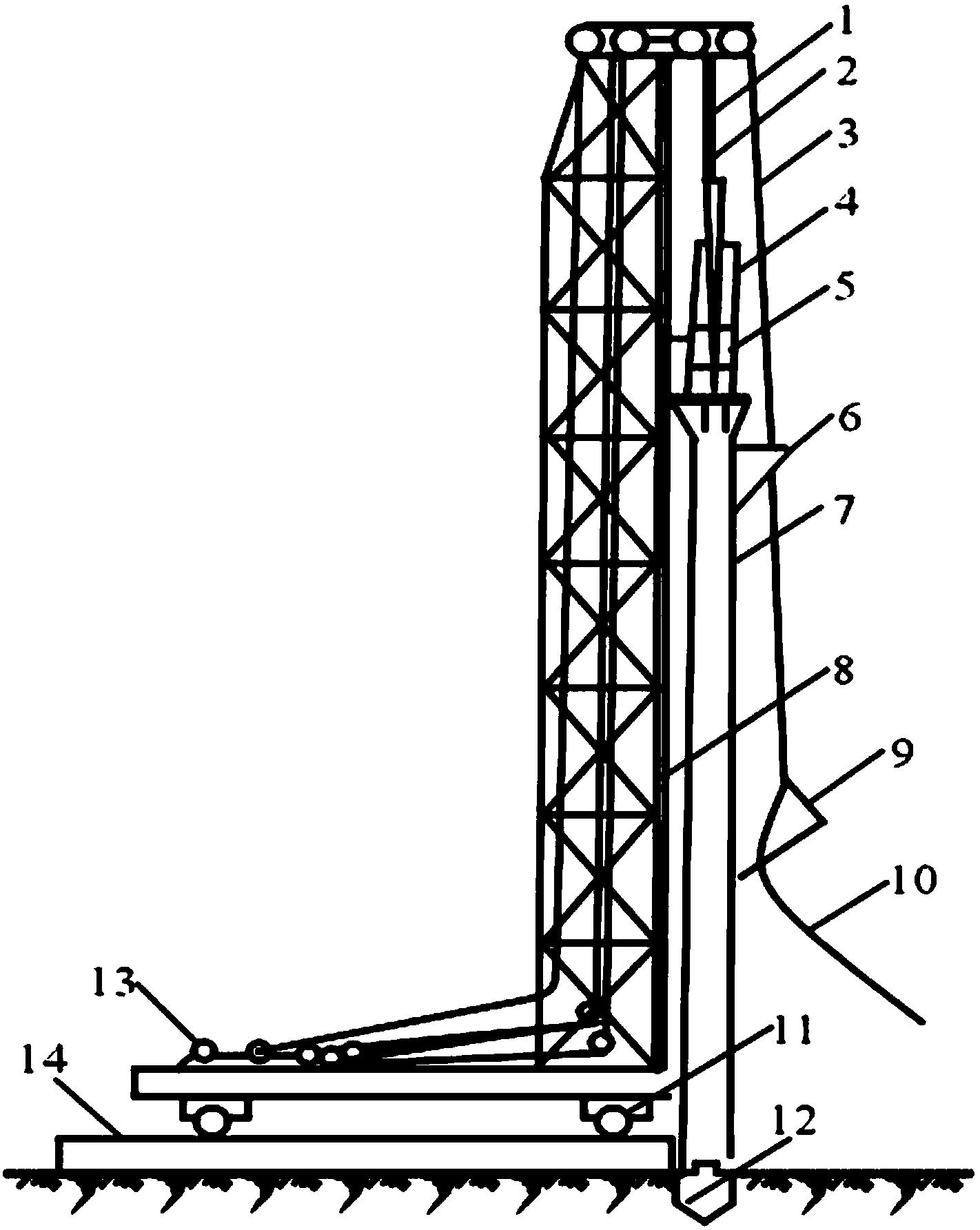
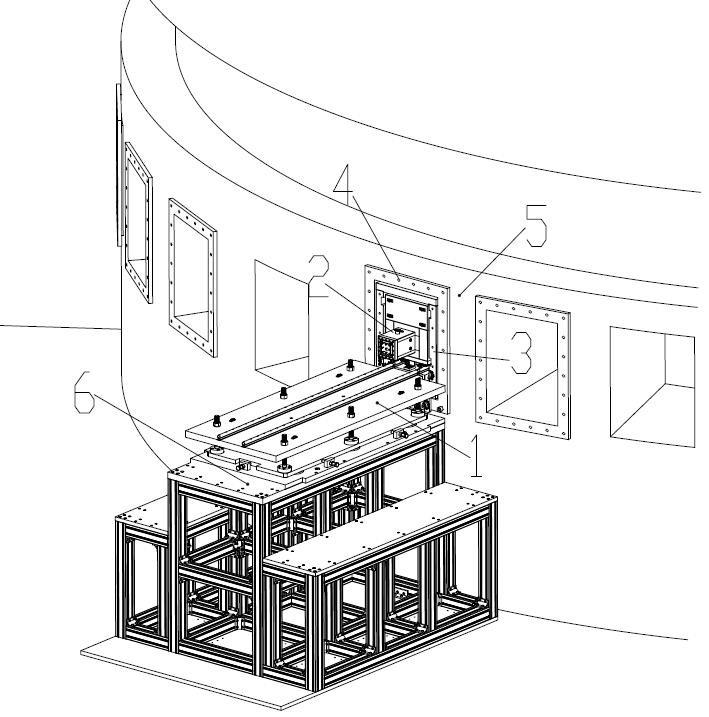
本例的白光中子源带电粒子探测谱仪真空靶室,如图1至图5所示,包括机械系统、真空气路系统和控制系统。其中,机械系统如图2至图5所示,包括真空腔体1、样品换样器2和探测器角度旋转机构3。真空腔体1用于容纳探测器0、样品换样器2和探测器角度旋转机构3,并为检测提供试验环境;真空腔体1与探测器0管道连通,并在连通管道上设置开关阀01。本例的真空腔体 1为圆筒形腔体,真空腔体1的外表面阳极化处理,内表面导电,如图6所示;圆筒形腔体的上下两端各设置有上法兰11和下法兰12,圆筒形腔体的侧壁上设置有一对供束线穿过圆筒形腔体的束线接口法兰13和14,以及若干个穿墙件法兰15。束线接口法兰13和14上固定有中子束窗,以便于中子束流穿过,中子束窗为厚度100微米的钽薄膜,有效直径为100mm。上法兰11和下法兰12采用耐辐射的氟橡胶密封圈,本例具体采用1010mm×横截面直径8mm的氟橡胶密封圈。并且,真空腔体1的侧壁外表面设置有四个准直定位靶标16,用于对真空腔体1进行空间定位。真空腔体上设有若干个吊装螺栓,以方便真空腔体吊装。本例的真空腔体工作真空度:腔体空载时极限真空度为5×10
本例的真空腔体1整体安装于支撑架7的上表面,支撑架7如图7所示,支撑架7用于将真空腔体1支撑起来,以方便探测器角度旋转机构3等结构的设计;支撑架7的底部设置有若干个万向轮71,以方便移动真空腔体1;支撑架7总体承重2吨。真空腔体1与支撑架7之间设置有高度调节机构8,用于微调真空腔体1的高度,如图4所示,具体的,高度调节结构8通过调节螺钉实现;高度调节机构8高度方向能够调节±10mm,水平两个方向能够调节±10mm,调节精度0.1mm。支撑架7的侧边上设置有水平调节板9,用于手动调节水平位置,如4和图5所示,水平调节板9与螺钉91配合实现水平位置的微调。
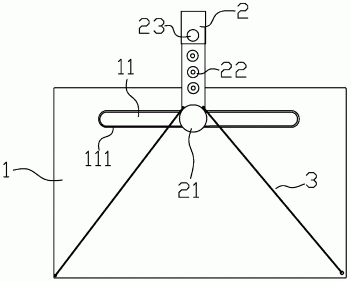
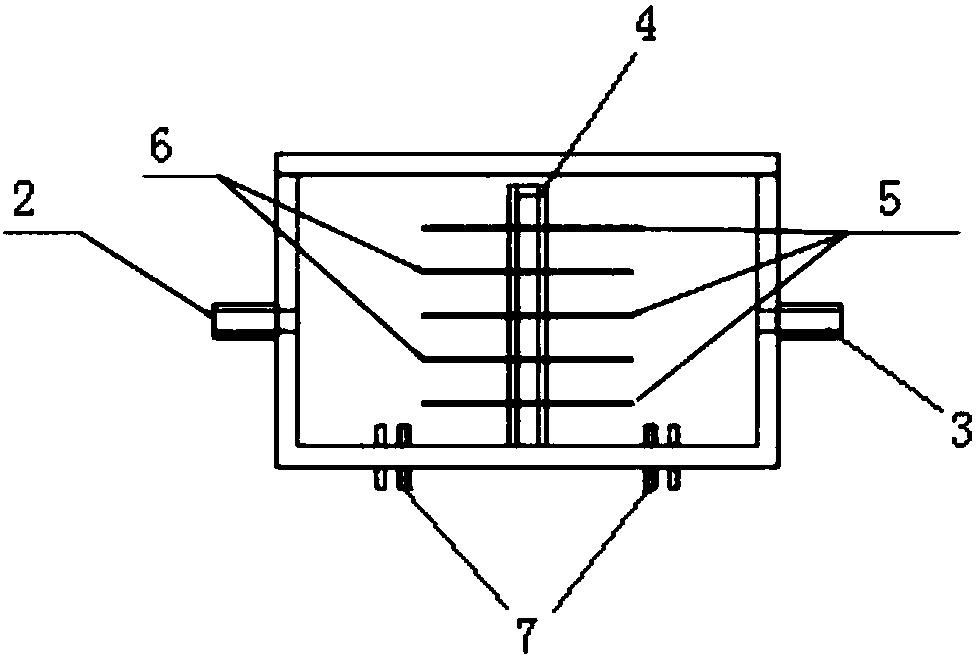
样品换样器2用于放置多个样品,样品换样器2采用波纹管密封,能够在真空下直线运动,实现样品切换。本例的样品换样器2,如图8所示,包括丝杆电机21和样品架22,样品架22采用波纹管23密封;上法兰最大变形量不超过 0.05mm,上法兰11上开设有样品换样器接口111,丝杆电机21固定安装在上法兰11的样品换样器接口111上,位于真空腔体1外面,样品架22通过样品换样器接口111伸入真空腔体1内;丝杆电机21驱动样品架22上下移动实现检测样品更换。本例的样品架22为钽制样品架,如图9所示,钽制样品架能够放置四个样品,重复定位精度0.05mm,样品换样器与真空腔体上法兰相对位置固定,真空腔体有24个连接螺丝总共和24个销,都成15°角均匀布局。不同角度的装配,使得样品架能够与束流方向成±30°、±45°、±60°和±75°,这八个角度位置都需要有滑配销定位,样品前有钽制屏蔽壳。
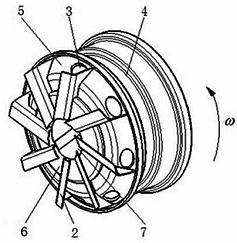
本例的探测器角度旋转机构3,如图10和图11所示,包括旋转盘31、旋转器32和驱动电机33,旋转器32伸入真空腔体1内部,并作为承载探测器0 的平台,旋转器32与真空腔体1之间采用磁流体密封;驱动电机33安装于真空腔体1外面,驱动电机33的活动端与旋转器32相连,用于驱动所述旋转器 32转动。具体的,本例的下法兰12上开设有探测器角度旋转机构接口121,探测器角度旋转机构3固定安装在下法兰12的探测器角度旋转机构接口121上,探测器角度旋转机构3的驱动电机33位于真空腔体1外面,探测器角度旋转机构3活动端即旋转器32通过探测器角度旋转机构接口121伸入真空腔体1内,用于安装探测器0。本例的探测器角度旋转机构3安装在探测器角度旋转机构接口121上后采用磁流体密封,能够在真空下旋转运动。
本例的旋转盘31为圆盘,设置于旋转器32的表面,旋转盘31上开设有若干刻度,用于标记旋转的角度;具体的,圆盘表面开设有若干沿着直径延伸的圆心中心对称的凹槽,凹槽将圆盘平均分割成若干等分的圆弧,用于标记旋转角度;其中,凹槽具体由三十六组长阶梯槽311和三十六组短阶梯槽312组成,长阶梯槽311和短阶梯槽312均匀间隔设置,两个长阶梯槽311之间的间隔为 10°,两个短阶梯槽312之间的间隔也为10°,长阶梯槽311与短阶梯槽312 间隔5°。
本例的探测器角度旋转机构3能够±10°旋转,重复定位精度0.05°。本例的磁流体密封件的漏率少于10
另外,为了使驱动电机33和旋转器32的转动惯量匹配,在改进方案中,还在驱动电机33和旋转器32之间设置了减速器。进一步的,本例的角度旋转机构还设置有限位开关,用于限定旋转角度。
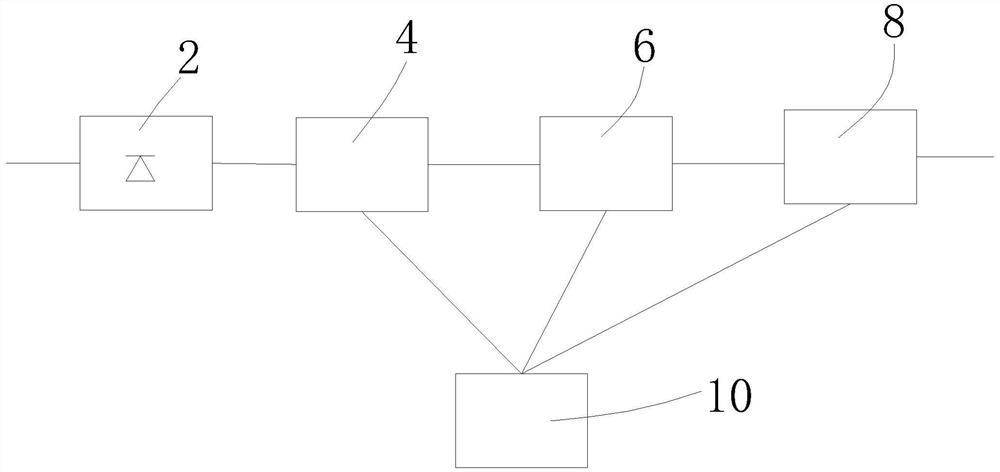
本例的真空气路系统包括真空组件和工作气体组件,真空组件分别与真空腔体1和探测器0管道连通,用于抽真空,保障真空腔体1和探测器0的真空度;工作气体组件与探测器0管道连通,用于为探测器0提供工作气体,并且,在真空组件和工作气体组件的协调下保障工作气体压力稳定。具体的,本例的工作气体组件包括高压气瓶4,高压气瓶4与探测器0管道连通,为其提供工作气体。高压气瓶4和探测器0之间设置有稳压平衡罐5;稳压平衡罐5上开设有复压阀51,用于保障工作气体压力,避免探测器电离室的束窗破裂;高压气瓶 4和稳压平衡罐5之间设置控制阀,稳压平衡罐5与探测器0之间设置控制阀。本例的真空组件包括耐1atm冲击的复合分子泵6,复合分子泵6独立的与真空腔体1管道连通;同时,复合分子泵6独立的经由稳压平衡罐5与探测器0管道连通。复合分子泵6与真空腔体1连通的管道上设置有第一比例调节阀61,并在第一比例调节阀61与真空腔体1之间设置有第一挡板阀62;复合分子泵6 与稳压平衡罐5之间的连通管道上设置有第二比例调节阀63,并在第二比例调节阀63与稳压平衡罐5之间设置有第二挡板阀64。
本例的下法兰12上的分子泵接口法兰122,用于连接复合分子泵6进行抽真空;稳压平衡罐5安装在支撑架7的底部,位于真空腔体1的正下方,稳压平衡罐5与真空腔体1管道连通,用于稳定真空腔体内的气压。
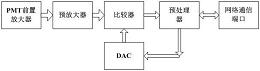
本例的控制系统用于协调控制探测器0、样品换样器2、探测器角度旋转机构3和真空气路系统。控制系统,如图12所示,包括基于EPICS的远程控制系统和基于横河PLC的本地控制系统。其中,本地控制系统使用横河PLC的顺控 CPU实现了包括运动控制、真空监测、气路稳压、离子束窗和真空元器件保护等功能。远程控制系统使用嵌入式CPU模块F3RP61运行EPICS IOC,使带电粒子探测器真空靶室控制系统的数据直接纳入基于EPICS的加速器控制系统中,从而方便实现远程OPI操作、历史数据存储、声音报警等功能。
本例的探测器包括气体探测器和电离室探测器,其设计要求如下:
a)ΔE-E探测器和电离室探测器都有粒子束窗,前者选择0.5微米聚乙烯,后者选择4.5微米PET。需要精确测量出两种探测器的漏率,包括离子束窗的漏率、气路接口的漏率等。
b)工作环境真空度:依据探测器的漏率和真空系统共同确定;粒子束窗能够承受工作气体的压强
c)ΔE-E探测器工作气体压强为1000Pa~5000Pa,不同实验的具体数值不一样,波动范围±5%;电离室探测器工作气体压强为1atm,波动范围±5%。
d)气路接口:快卸转换接头。
本例的真空腔体等结构的具体研制过程如下:
一、真空腔体的设计与研制
如图2和图3所示,真空腔体既是一个散射腔,是探测器工作的空间,又是一个样品腔,是在线换样的空间。它由圆筒、上下法兰、腔体周围法兰、二维调节机构和支撑架等组成。
1.真空腔体的有限元分析
根据铝制压力容器JB1580-75,DN1000铝制圆柱腔体厚度约为18-20mm,本例的腔体周围有8个小法兰,因此,厚度选择24mm;根据量 JISB2290-1998Vacuum technology-flange dimensions,真空腔体上下法兰 DN1000,螺纹孔直径1090mm,密封槽内径1010mm,槽宽10mm,槽深6.4mm。采用铁岭橡胶工业研究设计院内径1010mm×横截面直径8mm的氟橡胶密封圈。并采用24个M24螺栓连接。
真空腔体的上法兰是样品换样器的基准,它的变形直接影响换样器的运动精度。主要的是通过有限元优化上法兰的结构。
真空腔体的上法兰有限元分析结果显示,上法兰尺寸: (厚度),凸台 (厚度),材料:AL5083。上法兰与样品换样器相连,为了保证样品定位准确,在上法兰中间部位加了一个凸台,减少变形量,有限元分析未考虑重力位移约33.9微米,考虑重力位移为34.9微米。当凸台厚度40时候,位移为39微米;当凸台厚度20时候,位移为46微米;当凸台厚度0时候,位移为56微米;当法兰厚度变成70,没有凸台,位移为78微米;当法兰厚度变成 90,没有凸台,位移为43微米。
真空腔体的下法兰有限元分析结果显示,下法兰尺寸: (厚度),材料:AL5083,下法兰与旋转机构相连,有限元分析位移约37μm。
考虑到上法兰结构不仅自身质量重,而且加工耗材量大,仿生汽车上板弹簧机构,设计成几个台阶,最大厚度由140mm变成125mm。整体有限元分析显示,真空腔体整体最大变形量位于上法兰中心位置,位移为44μm,优于设计指标50μm。
2.真空腔体的制造
真空腔体是个铝制容器,先用30mm厚的铝合金板卷成内径1016mm的圆筒,相连处焊透,上下法兰、上下盖板和周围法兰在腔体内部焊接,所有进行无损检测保证内部没有裂缝,整体焊接好需要进行残余应力失效处理,腔体外表面进行阳极化处理,内表面抛光。
圆筒制造工艺中,采用等离子下料,下料尺寸:3210×510×30;刨床采用龙门刨床加工宽度至尺寸490;龙门铣,加工长度方向至尺寸3192;钣金,根据图纸尺寸进行卷筒,中心直径 焊接,根据图纸尺寸进行纵向焊接,焊接要求全焊透;车床,立车夹外圆,车内孔至尺寸 撑内孔加工外圆至图纸尺寸,加工两端台阶及焊接坡口;最后清洗去除表面油污,即获得所需圆筒。
上下法兰制造工艺中,下料同样采用等离子下料,下料尺寸: 中心掏孔至尺寸 车床,立车夹外圆车孔至尺寸 见光一端面,调头撑内孔车外圆至尺寸,夹外圆车内孔及台阶到尺寸;最后清洗去除表面油污,即获得所需法兰。
在获得真空腔体后需要分别进行粗加工和精加工。粗加工工艺中,焊接需要根据图纸要求进行对位,自检尺寸合格后进行焊接,要求内部密封焊,外部加强焊,焊接时进行预热;并需要对筒体焊缝进行检漏;车床,立车夹外圆校正后,车一端法兰见光,调头夹外圆车另一法兰至厚度48,调头夹外圆车另一法兰至厚度48,外圆及内孔到图纸尺寸;卧加,以法兰面为基准,工作台旋转加工所侧面孔到图纸尺寸;最后清洗去除表面油污。粗加工工艺中,焊接,根据图纸要求进行对位,自检尺寸合格后进行焊接,要求内部密封焊,外部加强焊,焊接时利用工装保证对称法兰的同轴度;然后,对筒体焊缝进行检漏;车床,立车夹外圆校正后,车一端法兰见光,调头夹外圆车另一法兰至厚度45,调头夹外圆车另一法兰至厚度45;卧加,以法兰面为基准,工作台旋转加工束流口法兰内孔及法兰平面,保证束流中心到法兰底面距离,及两法兰同轴度;最后清洗去除表面油污。
表面处理,将所有安装口用盲板密封,然后将腔体放置到阳极氧化池中,进行阳极氧化,保证接触真空部分的表面不被阳极氧化;或者整体氧化,内表面抛光;清洗,根据超高真空要求对零件进行清洗,
上盖板制造工艺中,下料采用等离子下料,下料尺寸 粗车,夹外圆一端,车外圆至尺寸 调头夹外圆接刀车外圆至尺寸 端面见光,调头夹外圆以底面为基准加工上表面台阶成型总厚度尺寸132,多次翻身每次进刀量1,加工总厚度至尺寸127,车外圆及内孔留余量单边1;时效处理,对零件进行自然时效,粗加工结束放置一段时间,和人工时效;半精车,每次进刀量0.3,3次翻身两面加工;精车,进刀量0.2两面加工至尺寸,车外圆及内孔至尺寸;数控,加工所有孔及 台阶面到尺寸;钳工,对螺纹孔进行栽丝处理;最后清洗去除表面油污。
支撑架制造工艺中,下料,上下底板采用材料316,支架采用8#方管;焊接完成后,需要进行热处理,对支架进行去应力退火;龙门铣,加工上平面至高度尺寸,保证平面度要求;最后清洗去除表面油污。
3.真空腔体的检测
真空腔体最关键的参数是真空度、漏率和接口尺寸形位公差。其测试结果如表2所示。
表2真空腔体检测结果
表2的结果显示,本例的真空腔体各项测试都符合设计要求。
二、样品换样器的设计与研制
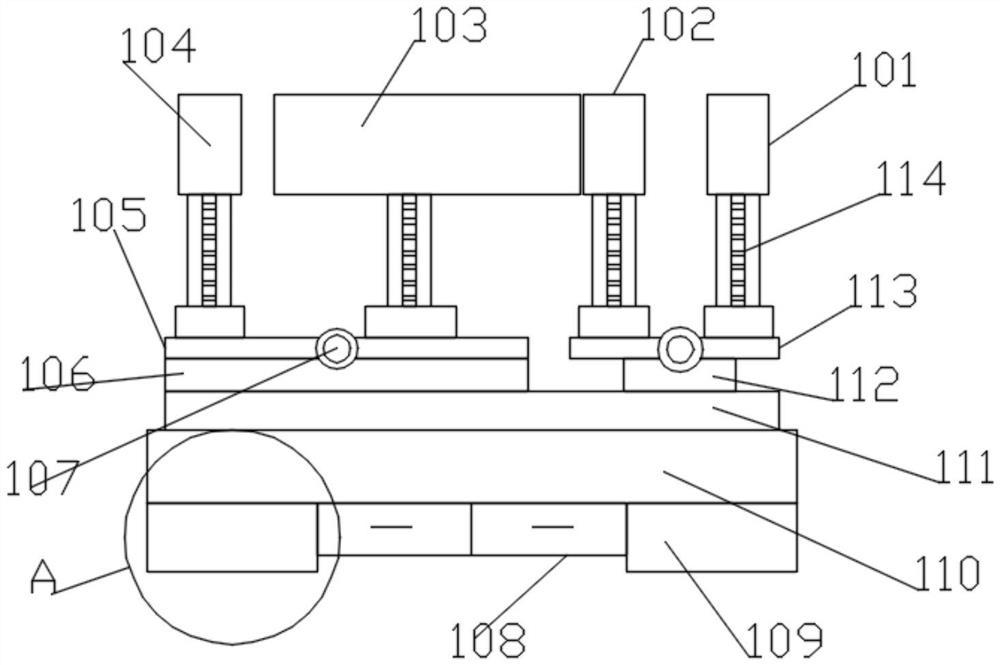
本例的样品换样器如图8所示,样品换样器是用来在线更换样品的,它包括电机21和样品架22,样品架22采用波纹管23密封;电机21固定安装在支撑架24上,支撑架24的表面设置有导轨25,电机21固定在导轨25的一端;波纹管23两端开口,两个端口分别采用上波纹管固定座231和下波纹管固定座232封闭,上波纹管固定座231活动安装于导轨25一端,并且是靠近电机21的一端,下波纹管固定座232固定安装于导轨25另一端,下波纹管固定座232上开设有供样品架22穿过的通孔,上波纹管固定座231和下波纹管固定座232安装好后将波纹管23架设于导轨25的正上方,并且与导轨25平行;电机21的丝杆211同样平行设置于导轨25的正上方,并且位于波纹管23和导轨25之间;样品架22通过下波纹管固定座232上开设的通孔穿入波纹管23内,并且与上波纹管固定座231固定连接;使用时,上波纹管固定座231在电机21的驱动下,沿导轨25和丝杆211向下移动,压缩波纹管23,同时带动样品架22伸出波纹管23,实现样品更换。
1.样品换样器的设计
样品换样器要求在真空中更换样品,即样品架是在真空环境下运行。通过电机带动丝杆,转换到真空波纹管压缩运动,最后带动样品架子上下运动,重复定位精度0.05mm。样品换样器安装好,工作时候样品重复定位精度为0.1mm。由于波纹管保护作用,使得样品始终处于真空状态。另外样品换样器还有两个限位开关,用来限制样品上下极限位置,也同时作为运动控制的零点。
样品架上总共有4个样品,样品架、样品的总质量约10Kg,波纹管真空压力折合质量约60Kg,总质量约70Kg。样品之间的距离为70mm,要求重复定位精度为0.05mm。
电机选型:本例采用伺服电机富士电机smart系列的GYB751D5-RB2(-B),电机输出轴直径为16mm,丝杆选择滚珠丝杆,丝杆螺纹为M16,导程为4mm。选择直轴无油封,编码器选择20位。
丝杆匀速运动,则电机需要最小的转矩为:
样品换样器的限位开关选择耐辐射的旋转欧姆龙/TZ-1G。
2.样品换样器的制造
本例采用波纹管腔体上法兰和波纹管腔体下法兰。
波纹管腔体上法兰工艺如下:
a.内孔增加台阶,通过L板进行过渡连接,由螺栓固定销孔定位,使后期装配及加工更加方便;
b.法兰背面添加波纹管焊接凸台,并留有焊接应力槽;
c.螺母连接孔由台阶孔改为直孔,配合滚珠丝杆螺母进行加工;
工艺流程中,下料采用等离子下料,下料尺寸190×145×45;刨床加工四周至尺寸178×130×40;线切割以长度方向一端为基准,校正平面后加工外形及割内孔到图纸尺寸,长度方向保留尺寸178;车床,四爪夹持法兰,校正平面后,加工波纹管焊接凸台及内孔两端台阶到尺寸;数控,以内孔凹槽面为基准,加工法兰底面到尺寸176,保证尺寸98公差要求;镗 通孔,并加工其他所有孔到尺寸;钳工主要是对螺纹孔进行攻丝处理;最后根据超高真空要求进行清洗,并利用三坐标检测工具对零件进行整体检测。
波纹管腔体下法兰工艺方案如下:
a.内孔增加台阶,通过L板进行过渡连接,由螺栓固定,使后期装配及加工更加方便;
b.法兰背面添加波纹管焊接凸台,并留有焊接应力槽;
工艺流程中,下料采用等离子下料,下料尺寸215×145×45;刨床,加工四周至尺寸200×130×40;线切割,以长度方向一端为基准,校正平面后加工外形及割内孔到图纸尺寸;车床,四爪夹持法兰,校正平面后,加工波纹管焊接凸台及内孔两端台阶到尺寸;数控,以法兰底面为基准,加工 孔到尺寸,保证尺寸43公差要求;镗 轴承孔,并加工其他所有孔到尺寸;钳工,对螺纹孔进行攻丝处理;最后根据超高真空要求进行清洗,并利用三坐标检测工具对零件进行整体检测。
样品架:由于零件长度尺寸较大、局部厚度较薄,作为整体结构加工,加工变形较难控制,难以保证零件的最终装配要求;本例的样品架工艺方案如下:
如图9所示,样品架由不锈钢板221与钽板进行钎焊后加工,并且在钽板尾部较薄处2mm厚钽板直接加工出容纳样品的圆孔222,这部分钽板及样品固定板223,不锈钢板221用于固定连接上波纹管固定座231。
不锈钢板工艺流程中,下料采用等离子下料,尺寸为520×100×12;刨床加工四周到尺寸510×90,加工6mm台阶到图纸尺寸;厚度方向两面抛光处理;最后进行去除表面油污。
钽板采用采购的110×95×12的钽板;然后进行刨床加工四周到尺寸105 ×90,加工6mm台阶到图纸尺寸,最后清洗去除表面油污即可。
不锈钢板与钽板连接采用进行真空钎焊;焊接完成后,数铣,厚度方向多次翻身加工,每次进刀量分别为1、0.5、0.5mm加工到尺寸8,加工四周到尺寸 555×80,加工台阶及所有孔到尺寸,销孔装配后配打;最后清洗,去除表面油污即可。
样品固定板采用采购的370×90×2的钽材料;然后进行线切割,加工四周到尺寸362×80,并加工4个 的通孔;通过数控加工台阶孔到尺寸,加工沉头孔;最后根据超高真空要求进行清洗即可
对本例的样品换样器的束流法兰端面与导轨承载面平行度、导轨支撑面与钽板的平行度、重复定位精度、焊接波纹管的漏率、样品架的平面度和丝杆的回程误差等进行检测,结果如表3所示。
表3样品换样器的检测结果
表3的结果显示,样品换样器的各项指标都符合设计要求。
三、角度旋转机构的设计与研制
本例的角度旋转机构包括旋转盘、旋转器和电机,旋转盘是为了让探测器能够旋转一定的角度,旋转盘与旋转器相连,然后再与电机相连。其中旋转器是一个磁流体密封件,旋转盘包含载荷的质量和转动惯量分别为100Kg、12.5 Kg.m
1.角度旋转机构的设计
角度旋转机构要求旋转部件在真空下运动,本例采用磁流体密封方式把旋转运动从空气中输运到真空中。旋转盘是一个转动惯量比较大的盘子,需要考虑惯量匹配问题。另外真空腔体内有比较大的中子辐射,需要考虑使用耐辐射的电子器件。
本例的磁流体密封件由杭州大和制造,其漏率少于10
电机选择伺服电机富士电机smart系列的GYG751C5-RB2(-B),电机输出轴直径为19mm。选择无油封,直轴,编码器选择20位。
经过计算旋转盘的转动惯量接近3Kg.m
减速器:本例采用日精AFCZ22H-60L200S2,输出轴直径为22mm,输入轴直径为14mm,功率为200W,传动比为1/60。旋转盘折算到电机轴上的转动惯量为12.5Kg.m
探测器旋转机构的限位开关旋转欧姆龙/TZ-1G,旋转变压器采用phytron。
2.角度旋转机构的检测
对本例的角度旋转机构的重复定位精度、旋转盘与真空腔体的同心度和旋转盘与真空腔体上法兰的平行度进行检测,结果如表4所示。
表4角度旋转机构的检测结果
表4的结果显示,本例制备的角度旋转机构符合设计要求。
四、带电粒子探测器机械结构的设计与研制
1.ΔE-E探测器
本例的ΔE-E探测器由小型多丝正比室(缩写MWPC)气体探测器和碘化铯固体探测器组成。ΔE-E探测器粒子束窗是0.5μm厚的聚乙烯薄膜,能够耐 5000Pa的压力差而不破裂。
2.电离室探测器
本例的电离室探测器是一个气体探测器,工作气体是氩气,内部结构是阴极、阳极、栅极和均压环,带电粒子进入到高压区域,就能够被探测到。由于带电粒子极容易被阻挡,粒子束窗选择8μm聚酰亚胺薄膜或者PET,粒子束窗能够承受1atm压力。
本例具体采用了两种商品膜作为粒子束窗,两种膜的试验结果如下:
Mylar膜,厚度8μm,有效直径为60mm时,结果显示,Mylar膜承受不了一个大气压力,破裂主要位于中间部位,这说明膜已经发生塑性失效。然后测量鼓起高度有10mm,这样形变量有30%。
聚酰亚胺薄膜或者PET,厚度8μm,有效直径60mm,经破坏试验,没有发生破裂,说明聚酰亚胺薄膜或者PET可以承受一个大气压力。本例的粒子束窗主要采用聚酰亚胺薄膜或者PET。
五、机械系统的准直安装
机械系统整体组装步骤如下:
1)将底部支架与调节板、下盖板进行装配并调节在居中位置;
2)安装磁流体,通过螺栓进行固定;
3)安装旋转盘,通过打表及激光跟踪仪对旋转板进行调节;
4)安装旋转盘限位开关,并通过激光跟踪仪进行标定;
5)安装4个气体探测器,探测器与探测器之间由真空橡胶管与卡箍进行连接;
6)安装真空腔体,通过锥销定位,由螺栓进行固定;
7)安装分子泵与旋转电机;
8)对样品换样器利用三坐标进行坐标标定;
9)安装上盖板与样品换样器集成,并通过激光跟踪仪进行整体标定;
10)将机械系统与气路系统进行对接;
11)对系统进行抽气检漏;
12)对整个系统进行联调;
其中,上盖板即上法兰11、下盖板即下法兰12。安装完成后,真空靶室前后法兰,即束线接口法兰13和14,的中心线与束流线同心度在0.05mm以内。
对安装好的真空靶室进行空载极限真空度测试、腔体上法兰与束流的平行度测试、漏率测试等检测。结果如表5所示。
表5机械系统测试结果
表5的结果显示,本例的真空靶室安装好后,各项性能都符合预期。
本例的真空靶室,使用时,通过真空和气路系统对真空靶室抽真空和工作气体补充。真空和气路系统的作用是抽真空以及工作气体的充入,这个过程中,需要严格控制,一方面,需要稳定探测器的气体压力,为探测器检测提供稳定的压力环境,避免束窗破裂;另一方面,需要维持一定的真空度,以保存稳压环境;并且,在进一步改进的方案中,还需要设计束窗万一破裂之后对分子泵和真空规等的保护措施。
本例的白光中子源带电粒子探测器真空靶室,其控制系统从物理角度分为硬件部分和软件部分,从远近角度分为现场控制系统(即设备系统控制)和远程控制系统。本例的现场控制系统使用横河PLC的顺控CPU实现了包括运动控制、真空监测、气路稳压、离子束窗和真空元器件保护等功能。远程控制系统使用嵌入式CPU模块F3RP61运行EPICS IOC,使白光中子源带电粒子探测器真空靶室控制系统的数据直接纳入基于EPICS的加速器控制系统中,从而方便实现远程OPI操作、历史数据存储、声音报警等功能。
本例的控制系统采用基于现场总线的分层分布、开放式可配置结构,整个绕制生产线在物理上分为三层:上位机监控控制层,控制器层和现场设备层。软件适合开放系统环境下运行,并具有成熟的运行经验。
本例的上位机监控控制层设备为一台Weinview的触摸屏,具有操作简便,用户界面友好,全汉化,提示清楚,功能详尽,可靠性高。主机/操作员工作站能自动完成白光中子源带电粒子探测器真空靶控制系统实时状态的采集与处理,实时运行参数的采集与处理、监控,对被控对象运行参数进行调节,报警及事故记录,历史数据、状态的查询,报表处理与打印,计算统计,实时显示设备运行状态和参数等功能。
控制器层采用客户要求的横河PLC系统,包括控制器、电源模块、I/O模块、位置控制模块、通信模块灯。开发安全可靠,功能完备的下位机程序,完成各个子系统和各设备的控制,监控,保护等功能。
现场控制层包括多种现场设备及子系统,包括气体系统,真空系统,阀组,泵组,各传感器,变送器,仪表,样品取样器,探测器角度旋转机构等。
本例的白光中子源带电粒子探测器真空靶室,其真空腔体的设计要求是腔体空载时极限真空为5×10
经测试小组现场观察与测试,真空腔体和样品换样器真空性能达到设计要求,样品换样器和探测器角度旋转机构运动控制与定位重复精度达到设计要求,气路控制能够平稳的工作,能够保证粒子束窗薄膜不破裂,探测器置换气体系统能够保证探测器工作气体纯度达到设计要求,探测器气体稳定系统能够使压强稳定度达到设计要求,各系统之间配合良好,运转平稳,各项指标均达到或优于设计要求。
本例的白光中子源带电粒子探测器真空靶室能够在真空和辐射环境下高精度移动和定位,并且可以实现在线更换样品,能够随时调节探测器与束流之间的角度,以满足不同的使用需求,为白光中子源的带电粒子探测奠定了基础。
以上内容是结合具体的实施方式对本申请所作的进一步详细说明,不能认定本申请的具体实施只局限于这些说明。对于本申请所属技术领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干简单推演或替换。
一种用于白光中子源带电粒子探测谱仪的角度旋转机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0