










专利摘要
本发明适用于激光应用技术领域,提供了一种光镊实时移动操控系统,包括:操控装置,与操控装置通过数据线连接的成像装置和光镊捕获样品动态观察装置;操控装置,用于根据用户的实时移动操作获得三维位置数据,并根据三维位置数据获得相应的位相调制图,并通过数据线将位相调制图加载到成像装置;成像装置,用于根据入射光束和位相调制图产生可任意移动其三维位置的聚焦光斑,聚焦光斑能够捕获样品池内的样品,并最终成像在捕获样品显示装置上;光镊捕获样品动态观察装置,用于显示被聚焦光斑捕获的样品的实时移动状态。本发明通过操控装置、成像装置及观察装置的相互配合,可实现光镊的实时任意移动,提高了光镊移动的灵活性。
权利要求
1.一种光镊实时移动操控系统,其特征在于,包括:操控装置,与所述操控装置通过数据线连接的成像装置,以及光镊捕获样品动态观察装置;
所述操控装置,用于根据用户的实时移动操作获得三维位置数据,并根据所述三维位置数据获得相应的位相调制图,并通过数据线将所述位相调制图加载到所述成像装置;
所述成像装置,用于根据入射光束和所述位相调制图产生可任意移动其三维位置的聚焦光斑,所述聚焦光斑能够捕获样品池内的样品,并最终成像在所述光镊捕获样品动态观察装置上;
所述光镊捕获样品动态观察装置,用于显示被所述聚焦光斑捕获的样品的实时移动状态;
所述操控装置包括:
三维位置数据获取单元,用于实时获取光镊的三维位置数据;以及
位相调制图获取单元,用于根据所述三维位置数据获得相应的位相调制图,并通过数据线将所述位相调制图加载到所述成像装置;
所述三维位置数据获取单元包括
二维图像控件,用于自动读取用户操控鼠标在所述操控装置的屏幕上的二维平面的实时移动所产生的任意x、y轴坐标值;
垂直滑动控件,用于自动读取用户在所述操控装置的屏幕上实时移动一维滑杆所产生的任意z轴坐标值;以及
三维位置确定模块,用于根据所述x、y轴坐标值和z轴坐标值确定当前移动的三维位置坐标(x,y,z);
所述位相调制图获取单元包括:
位相调制图获取模块,用于根据所述三维位置坐标调用与之对应的归一化位相调制图;以及
位相调制图显示模块,用于根据LabView的强度图显示所述归一化位相调制图,并通过数据线将所述归一化位相调制图加载到所述成像装置。
2.如权利要求1所述的光镊实时移动操控系统,其特征在于,所述成像装置包括:激光器、扩束准直系统、线偏振器、第一分束器、空间光调制器、傅里叶变换成像系统、第二分束器、光镊聚焦物镜、成像透镜以及电荷耦合成像器件。
3.如权利要求2所述的光镊实时移动操控系统,其特征在于,所述成像装置的成像过程包括如下步骤:
所述激光器发射出激光束经所述扩束准直系统后入射所述线偏振器,出射线偏振光束经过所述第一分束器后入射所述空间光调制器;
所述空间光调制器根据入射光和所述位相调制图获得位相调制光束;
所述位相调制光束经过所述傅里叶变换成像系统,再透过所述第二分束器,进入所述光镊聚焦物镜,产生聚焦光斑;
所述聚焦光斑能够捕获样品池内的样品,并经过所述光镊聚焦物镜和第二分束器、成像透镜以及电荷耦合成像器件,最终成像在所述光镊捕获样品动态观察装置上。
4.如权利要求2所述的光镊实时移动操控系统,其特征在于,所述成像装置还包括照明光源和照明物镜;
所述照明光源安装在所述样品池上方;
所述照明光源经过所述照明物镜照射到所述样品池内以照明样品。
说明书
技术领域
本发明属于激光应用技术领域,尤其涉及一种光镊实时移动操控系统。
背景技术
全息光镊技术是目前光镊多功能化发展的最重要方向。纽约州立大学的Girer教授是全息光镊的发明者,2003年,Girer教授首次在Nature杂志上预言全息光镊将会给光捕获带来革命性的发展。
全息光镊的一个特点是可以产生多个光镊或阵列光镊,从而可以自由控制多个粒子,使得粒子的融合、吸附以及粒子间或粒子与表面的相互作用研究得到简化,如将病毒植入细胞过程的操控。全息光镊在对多粒子操控方面的优势,为光镊技术走向实用化打开了新局面。
但是,全息光镊由于空间光调制器像素本身构成的二维光栅造成的衍射,导致光能利用率比较低,特别是对多光阱全息光镊,平均到每个光阱中的激光功率非常低,这会使得光阱的捕捉能力下降。
原则上全息光镊可以产生任意形状,大小和位置的光阱。通过改变捕获光的相位分布,可以使捕获粒子在光阱中按设定的路线运动。这里光阱在设定路线上的位置决定了捕获光的相位分布。因此,对应每个位置的相位分布必须事先画好,才能连续加载到空间光调制器。这是所谓的动态单光阱全息光镊。在细胞研究方面,这种按事先设定路线移动的光镊很显然缺乏应有的灵活性,极大地限制了光镊的应用价值。
发明内容
本发明实施例提供一种光镊实时移动操控系统,旨在解决现有的光镊系统只能按照事先设定好的路线移动,灵活性差的问题。
本发明实施例是这样实现的,一种光镊实时移动操控系统,包括:操控装置,与所述操控装置通过数据线连接的成像装置,以及光镊捕获样品动态观察装置;
所述操控装置,用于根据用户的移动操作获得三维位置数据,并根据所述三维位置数据获得相应的位相调制图,并通过数据线将所述位相调制图加载到所述成像装置;
所述成像装置,用于根据入射光束和所述位相调制图产生可任意移动其三维位置的聚焦光斑,所述聚焦光斑能够捕获样品池内的样品,并最终成像在所述光镊捕获样品动态观察装置上;
所述光镊捕获样品动态观察装置,用于显示被所述聚焦光斑捕获的样品的实时移动状态。
本发明实施例提供的光镊实时移动操控系统,可根据用户在操控装置上的移动操作获取三维位置数据,并根据该三维位置数据调用与之对应的位相调制图,并通过数据线将位相调制去加载到成像装置,使得成像装置可以根据该位相调制图产生可以任意移动其三维位置的聚焦光斑,该聚焦光斑能够捕获处于样品池内的样品(包括细胞、微粒等),并最终成像在光镊捕获样品动态观察装置上,使得用户可以观察到被该聚焦光斑捕获的样品的实时移动状态,从而实现了光镊捕获样品的任意移动,不再需要事先设定光镊移动路径,大大提高了光镊移动的灵活性,这可使得光镊系统能够适用于研究很多无法预测的随机事件,比如,要将一个细胞随意移动或跟踪某一随机运动的病毒等,提高了光镊的应用范围和应用价值,具有重要的科学意义。
附图说明
图1是本发明实施例提供的光镊实时移动操控系统的结构示意图;
图2是本发明实施例提供的一种操控装置的模块结构示意图;
图3是本发明实施例提供的一种三维位置数据获取单元的结构示意图;
图4是本发明实施例提供的一种二维图像控件示意图;
图5是本发明实施例提供的一种垂直滑动控件示意图;
图6是本发明实施例提供的一种位相调制图;
图7是本发明实施例提供的一种操控装置的操控框图;
图8是本发明实施例提供的一种光镊实时移动操控系统的结构示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
在本发明实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。在本发明实施例和所附权利要求书中所使用的单数形式的“一种”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
本发明实施例提供的光镊实时移动操控系统,可根据用户在操控装置上的移动操作获取三维位置数据,并根据该三维位置数据调用与之对应的位相调制图,并通过数据线将该位相调制图加载到成像装置,使得成像装置可以根据该位相调制图产生可以任意移动其三维位置的聚焦光斑,该聚焦光斑能够捕获处于样品池内的样品(包括细胞、微粒等),并最终成像在光镊捕获样品动态观察装置上,使得用户可以观察到被该聚焦光斑捕获的样品的实时移动状态,从而实现了光镊捕获样品的任意移动,不再需要事先设定光镊移动路径,大大提高了光镊移动的灵活性。
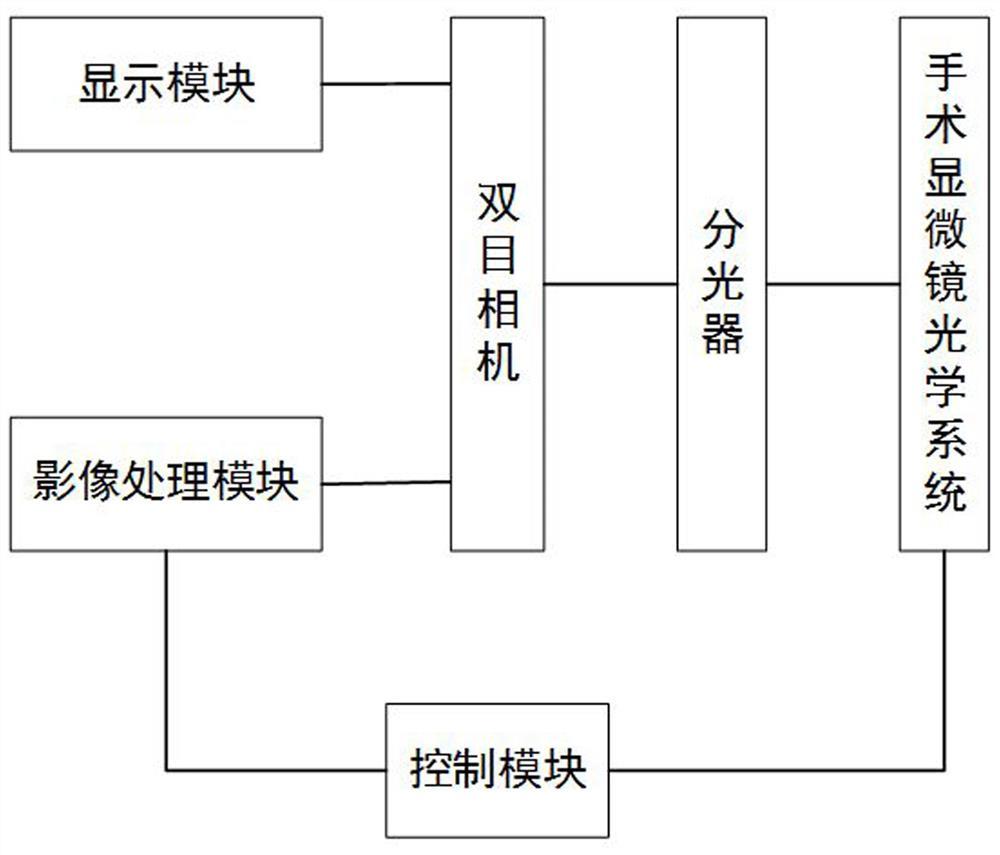
图1为本发明实施例提供的光镊实时移动操控系统的结构示意图,为了便于说明,图中仅示出了与本发明实施例相关的部分,详述如下:
如图1所示,本发明实施例提供的光镊实时移动操控系统,包括:操控装置100,与操控装置100通过数据线连接的成像装置200,以及光镊捕获样品动态观察装置300。
操控装置100,用于根据用户的移动操作获得三维位置数据,并根据所述三维位置数据获得相应的位相调制图,并通过数据线将所述位相调制图加载到所述成像装置200。
在本发明实施例中,操控装置100可以是台式计算机,该台式计算机安装有Labview软件,并带有可连接到空间光调制器的数据线接口。
在本发明的一个实施例中,用户可通过鼠标等移动器件在操控装置100的屏幕上进行任意的移动点击如图4中的xy坐标轴交叉点,从而实时改变xy二维位置数据,与此同时,用户可任意实时移动在操控装置100的屏幕上的一维滑杆上的浮标,从而实时改变z轴坐标值,进而获得一任意的三维位置数据(即三维位置坐标值)。并且,根据当前的三维坐标值获得与之对应的位相调制图。其中,位相调制图,是指代表光束横截面0到2π的调制位相分布的可被空间光调制器识别和执行的归一化的黑白灰度图。
在本发明实施例中,根据傅里叶变换相移定理,来确定二维位置移动对应的位相调制值,以及根据理查德-沃尔夫矢量衍射积分公式确定轴向移动光斑所需要的位相调制值。
在本发明实施例中,操控装置100根据三维位置数据获得相应的位相调制图,其中该位相调制图是事先根据每一个三维位置计算好的。在实际应用中,当用户移动操控装置100屏幕上的xy平面坐标交叉点和一维滑杆上的游标产生三维位置数据时,即可调用与该三维位置数据相应的位相调制图。
成像装置200,用于根据入射光束和位相调制图产生可任意移动其三维位置的聚焦光斑,聚焦光斑能够捕获样品池内的样品,并最终成像在光镊捕获样品动态观察装置300上。
其中,位相调制图决定了光斑聚焦的三维位置,这两者之间是一一对应的。
在本发明实施例中,成像装置200根据光源入射光束以及从操控装置100处加载过来的位相调制图,产生任意可移动其三维位置的聚焦光斑,即实时改变聚焦光斑的三维位置,使得聚焦光斑可以任意移动并捕获样品池内的样品(如细胞、微粒等),并且通过一系列的光学成像器件,最终使得样品可成像在光镊捕获样品动态观察装置300上。
光镊捕获样品动态观察装置300,用于显示被聚焦光斑捕获的样品的实时移动状态。
在本发明实施例中,光镊捕获样品动态观察装置300可以是台式计算机。
在本发明的一个实施场景中,当用户使用鼠标在操控装置100的屏幕上任意移动或滑动时,随即将根据该移动或滑动操作获得的位相调制图加载到成像装置200上,使得成像装置200可以同步产生相应三维位置聚焦光斑,即操控装置100接收任意移动操作后,成像装置200即可产生与之对应的任意移动聚焦光斑,任意移动的聚焦光斑可以捕获在其聚焦区域范围内的细胞、微粒等样品,并且可以拖动这些样品任意移动,并成像在光镊捕获样品动态观察装置300上,使得用户可以实时观察到光镊捕获样品的移动状态,便于做进一步的研究工作。
本发明实施例提供的光镊捕获样品移动操控系统,通过操控装置读取用户的移动操作获得三维位置数据,并根据该三维位置数据获得与之对应的位相调制图,再通过数据线将位相调制图加载到成像装置,使得成像装置可以根据该位相调制图产生可以任意移动其三维位置的聚焦光斑,该聚焦光斑能够捕获处于样品池内的样品(包括细胞、微粒等),并最终成像在光镊捕获样品动态观察装置上,使得用户可以观察到被该聚焦光斑捕获的样品的实时移动状态,从而实现了光镊捕获样品的任意移动,不再需要事先设定光镊移动路径,大大提高了光镊移动的灵活性,这可使得光镊系统能够适用于研究很多无法预测的随机事件,比如,要将一个细胞随意移动或跟踪某一随机运动的病毒等,提高了光镊的应用范围和应用价值,具有重要的科学意义。
图2为本发明实施例提供的一种操控装置结构示意图,为了便于说明,图中仅示出了与本实施例相关的部分,详述如下:
在本发明实施例中,操控装置100包括三维位置数据获取单元101和位相调制图获取单元102。
三维位置数据获取单元101,用于实时获取光镊的三维位置数据。
结合图3,在本发明实施例中,三维位置数据获取单元101包括:二维图像控件1011、垂直滑动控件1012和三维位置确定模块1013。
二维图像控件1011,用于自动读取用户操控鼠标在所述操控装置的屏幕上的二维平面的实时移动所产生的任意x、y轴坐标值。
在本发明实施例中,二维图像控件1011可为建立在操控装置100的前面板上的二维xy轴坐标图像(如图4所示)。该二维xy轴坐标图像可作为聚焦光斑在垂直于光轴的平面内位置的xy坐标值的控件。例如,当接收到用户通过鼠标在操控装置100的屏幕上点击或移动活动游标向下和向右分别移动50μm时,将x轴和y轴的刻度值修改为(50μm,-50μm)。
垂直滑动控件1012,用于自动读取用户在所述操控装置的屏幕上实时移动一维滑杆所产生的任意z轴坐标值。
在本发明实施例中,垂直滑动控件1012可以是建立在操控装置100的前面板上的垂直滑动条(如图5所示),可作为表征聚焦光斑在光轴z方向的位置坐标值的控件。例如,当通过鼠标点击或滑动该垂直滑动控件1012上的浮标或移动块向上或向下运动,如向下移动10μm,则z轴的刻度值修改为-10μm。
三维位置确定模块1013,用于根据x、y轴坐标值和z轴坐标值确定当前移动的三维位置坐标(x,y,z)。
在本发明的一个实施例中,假设原定的坐标位置为(0,0,0),操控装置100读取到用户通过鼠标移动二维图像控件1011上的活动游标沿着x轴向左移动50μm,然后再沿着y轴向上移动50μm,并滑动垂直滑动控件1012沿着z轴向上移动10μm,那么最后确定移动后的三维位置坐标为(-50μm,50μm,10μm)。
位相调制图获取单元102,用于根据三维位置坐标调用相应的位相调制图,并通过数据线将位相调制图加载到成像装置。
在本发明的一个实施例中,结合上述实施例的例子,当确定当前移动后的三维位置坐标为(-50μm,50μm,10μm)时,根据该三维坐标(-50μm,50μm,10μm)获取与之对应的的位相调制图(如图6所示)。
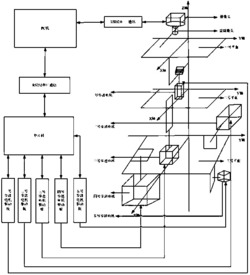
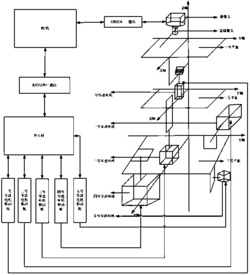
在本发明的一个实施例中,结合图7,在操控装置100的前面板上建立一操控框图,其中,该操控框图包括二维图像控件框图201、xy光标位置框图202、垂直滑动控件框图203、x轴坐标显示框图204、y轴坐标显示框图205、Matlab脚本绘制的位相调制图库206、位相调制显示框图207以及While循环停止框图208。其中,x轴坐标显示框图204和y轴坐标显示框图205分别与xy光标位置框图202和Matlab脚本绘制的位相调制图库206连接,垂直滑动控件框图203与Matlab脚本绘制的位相调制图库206连接,位相调制显示框图207与Matlab脚本绘制的位相调制图库206连接。
x轴坐标显示框图204、y轴坐标显示框图205分别用于显示输入的x坐标值和y坐标值。Matlab脚本绘制的位相调制图库206根据接收到的xyz坐标值,调用相应的位相调制图,并输出至位相调制显示框图207中。
While循环停止框图208,用于在程序运行开始后不断根据用户获取的三维位置数据的循环或停止循环或者停止操控装置100的程序运行。
位相调制图显示模块207,用于根据LabView的强度图显示所述调取的归一化位相调制图,并通过数据线将所述归一化位相调制图加载到所述成像装置。
在实际应用中,可先在操控装置100的前面板上编辑基于傅里叶变换相移定理的位相调制图计算的Matlab脚本程序,事先绘制与三维空间每一个足够小的区域对应的一系列位相调制图,该足够小的区域可以等同为一个点,从而构成数量非常大但数量有限的三维位置位相调制图库,使得实时操作光镊时可以实时调用任意三维位置对应的位相调制图。同时根据xyz三维坐标值,在前面板上添加LabView的强度图,并使与Matlab脚本绘制的位相调制图库206的输出端口与该强度图连接,使得位相调制显示框图207能够显示调用的归一化位相调制图。
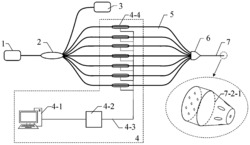
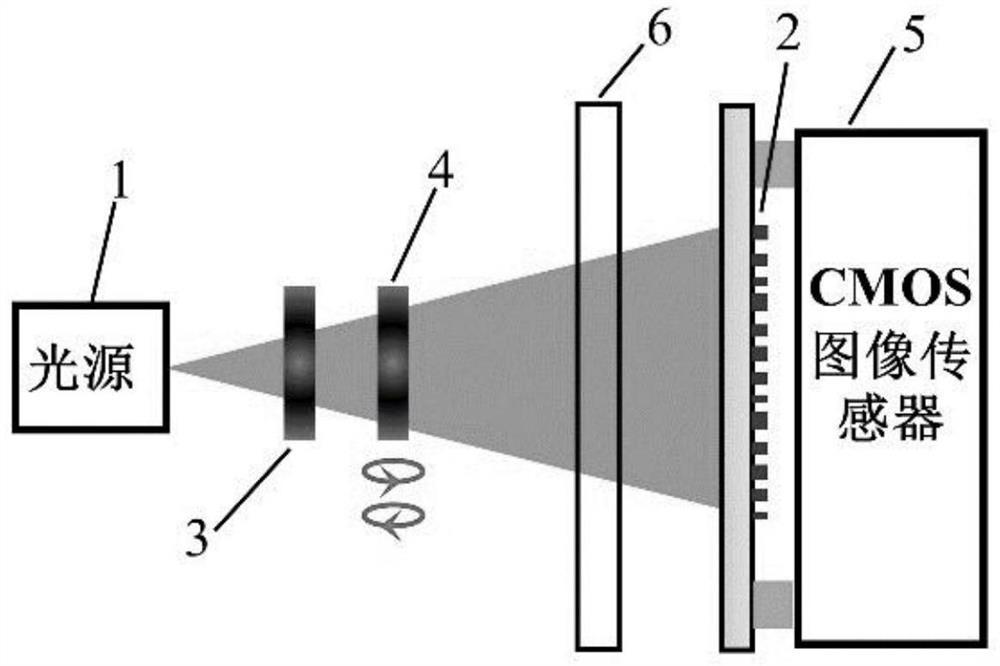
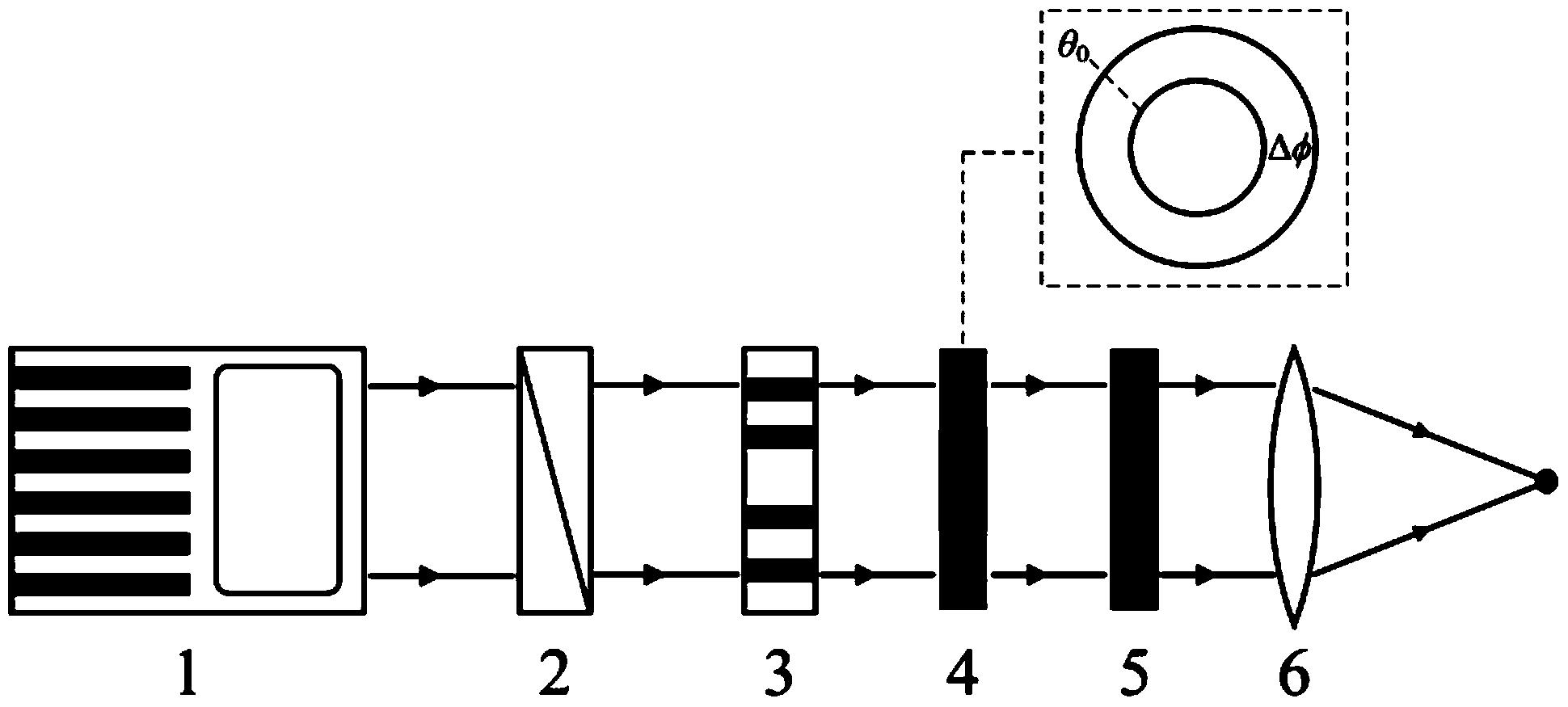
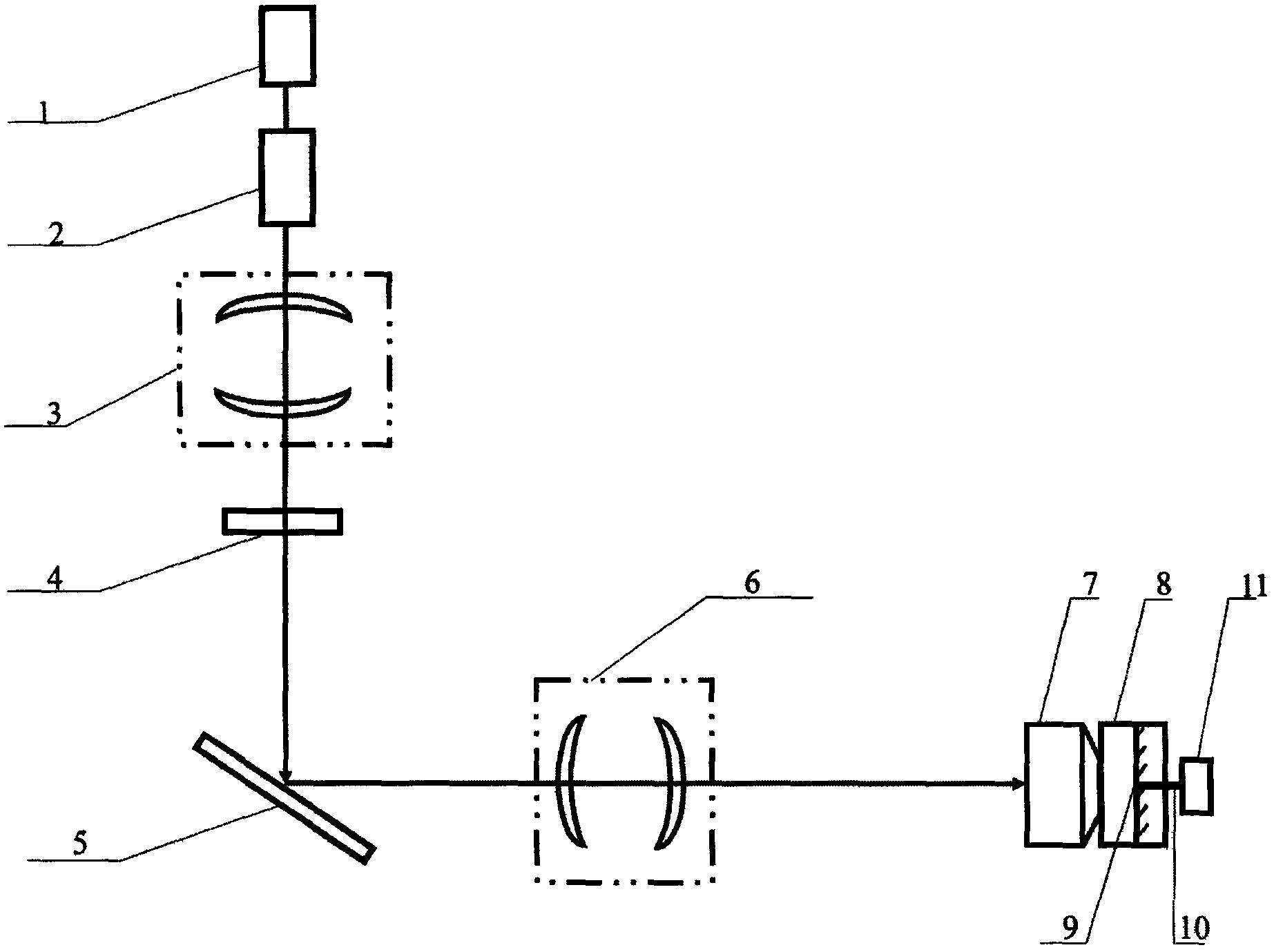
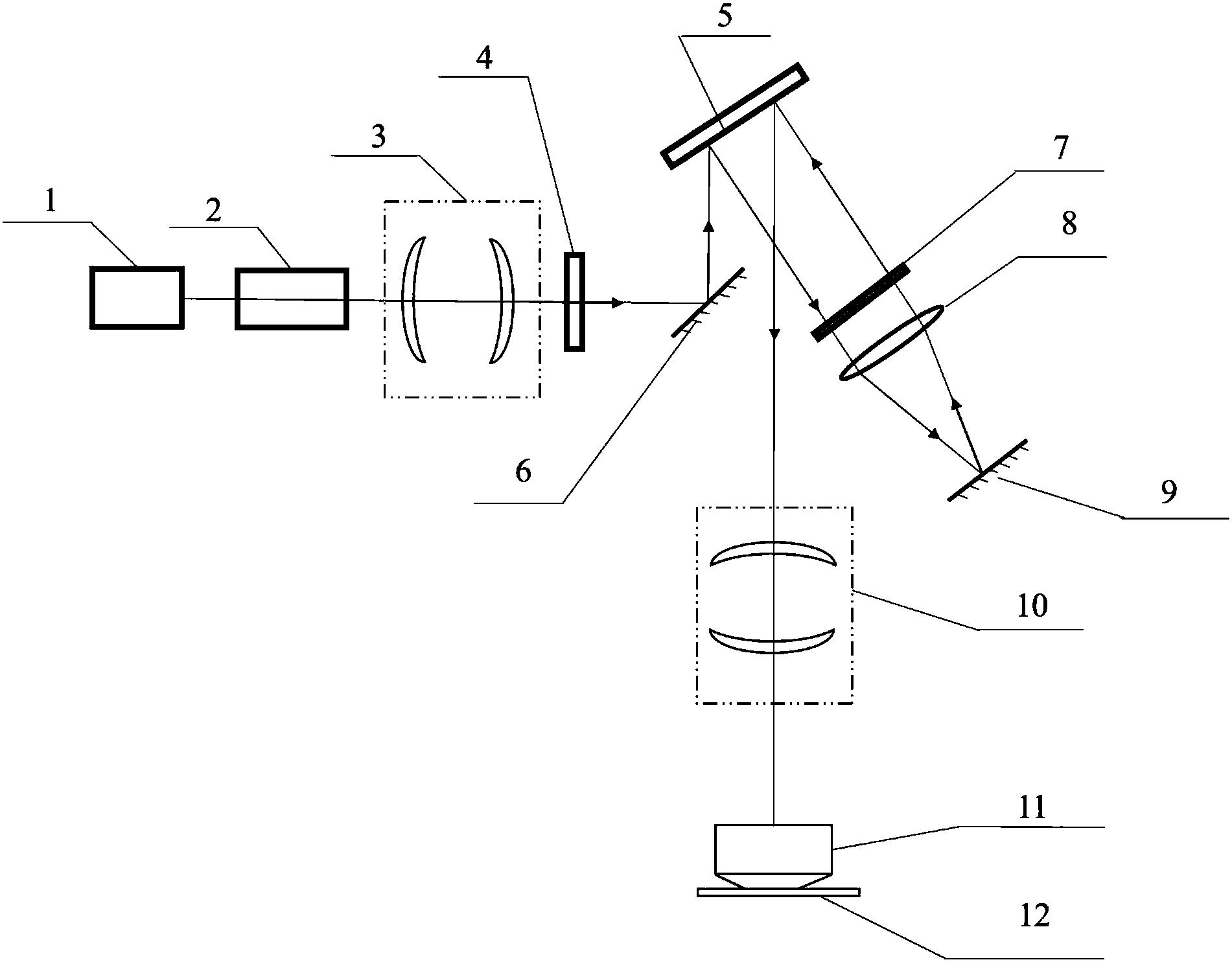
结合图8,在本发明实施例中,该成像装置200包括:激光器1、扩束准直系统2、线偏振器3、第一分束器4、空间光调制器5、傅里叶变换成像系统6、第二分束器7、光镊聚焦物镜8、成像透镜12以及电荷耦合成像器件13。
在本发明实施例中,成像装置200的成像过程包括如下步骤:
激光器1发射出激光束经扩束准直系统2后入射线偏振器3,出射线偏振光束经过第一分束器4后入射空间光调制器5;空间光调制器5根据入射光和从操控装置100处加载得到的位相调制图获得位相调制光束;位相调制光束经过傅里叶变换成像系统6,再透过第二分束器7,进入光镊聚焦物镜8,产生聚焦光斑;聚焦光斑能够捕获样品池9内的样品,并经过光镊聚焦物镜8和第二分束器7、成像透镜12以及电荷耦合成像器件13,最终成像在光镊捕获样品动态观察装置300上。
在本发明实施例中,操控装置100上安装有Labview软件,以及所使用的空间光调制器5的动态链接库,以将实时获得的位相调制图通过数据线及时加载到空间光调制器5。
在本发明实施例中,上述空间光调制器5为反射型纯相位空间光调制器。
在本发明实施例中,参见图8,成像装置200还包括照明光源11和照明物镜10;照明光源11安装在样品池9上方;照明光源11经过照明物镜10照射到样品池9内以照明样品。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
一种光镊实时移动操控系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0