







专利摘要
本发明提供一种基于局部偏移的AUV多波束数据构图方法,一是针对每一时刻的多波束地形数据和导航数据,使用前几个时刻的数据对该时刻的多波束数据进行预测,并使用预测值与实际值计算该时刻的似然性;二是将每个时刻的似然性与预设的阈值进行比较,大于阈值的时刻作为存在局部偏移的时刻;三是对所有存在局部偏移的时刻,分别沿AUV载体坐标系x轴正负方向移动一定距离并分别计算步骤一得到的预测值与每个距离对应地形数据的似然性,选择对应似然性最小值的距离作为局部偏移;四是考虑局部偏移对所有时刻的影响,计算新的航迹点位置;五是将所有航迹点连接起来作为新的修正后的路径;六是使用修正后的路径和每一时刻的多波束地形数据重新绘图。
权利要求
1.一种基于局部偏移的AUV多波束数据构图方法,其特征在于:包括如下步骤:
步骤一:针对每一个时刻t的多波束地形数据和导航数据,使用前A个时刻的数据对该时刻t的多波束数据进行预测得到预测值,并使用预测值与实际值计算该时刻t的似然性θt,其中7≤A≤10;
步骤二:将每个时刻的似然性θt与预设的阈值进行比较:将似然性θt大于阈值的时刻作为存在局部偏移的时刻;若似然性θt小于阈值,t=t+1,返回步骤一;
步骤三、对所有存在局部偏移的时刻,分别沿AUV载体坐标系的xAUV轴正负方向移动一定距离并分别计算步骤一得到的预测值与每个距离对应地形数据的似然性,选择对应似然性最小值的距离作为局部偏移wt,判断当前时刻是否为最后时刻,若是最后时刻则进行步骤四,否者t=t+1,返回步骤一;
步骤四、考虑局部偏移对所有时刻的影响,计算新的航迹点位置;
步骤五、将所有航迹点连接起来作为修正后的路径;
步骤六、使用修正后的路径和每一时刻的多波束地形数据重新绘图。
2.根据权利要求1所述的一种基于局部偏移的AUV多波束数据构图方法,其特征在于:步骤一包括:
第一:对每个时刻,根据导航数据,确定该时刻的多波束测线各测点的位置;
第二:针对每个测点,根据前A个时刻的多波束数据,采用高斯加权插值的方式计算该测点的水深值,其中7≤A≤10;
第三:根据第二步测得的每个测点水深值 和当前时刻实际测量的水深值zt,k,计算似然性θt:
其中:AUV惯性导航系统的路径节点坐标为 zt={zt,1,zt,2,...,zt,k,...,zt,N}表示t时刻所有N个测点的集合,p(zt|xt)是当前惯导指示位置是由上一点推算的实际位置的概率,N表示每一个时刻的测点个数,σt=diag(σt,1,σt,2,...,σt,k)是由t时刻N个测点水深值标准差组成的对角阵,zt,k表示t时刻第k条测点实际测量的水深值, 表示对应于zt,k位置由上一时刻推算出的水深值。
3.根据权利要求1或2所述的一种基于局部偏移的AUV多波束数据构图方法,其特征在于:步骤四包括:
定义路径上存在两个局部偏移wt和wt+p分别位于t和t+p时刻,以t+1时刻为例,t+1时刻新的航迹点位置为:
式中: 是当前惯导指示位置是考虑局部位置wt之后由上一点推算的实际位置的概率;σt是由t时刻各测点的标准差组成的对角矩阵; 表示对应zt,k位置在考虑局部位移wt之后由上一时刻推算出的水深值;vt+1为t+1时刻xt+1位置的偏移;wt是t时刻的局部偏移,wt+p是t时刻之后第一个局部偏移; 为修正后t+1时刻新的航迹点位置。
说明书
技术领域
本发明涉及一种基于局部偏移的AUV多波束数据构图方法,属于海底地形地貌的测绘技术领域。
背景技术
随着多波束技术的发展,高精度的海底地形测绘和水下机器人地形匹配导航技术的应用成为可能。水下机器人的地形匹配依赖于海底先验地图的构建。目前的海底地图构建方法通常是由船载多波束声呐扫描海底地形,但由于多波束声呐测线长度的限制,无法完成对较深海域的地形测绘。本发明提出了一种不依赖于GPS数据的AUV配载多波束声呐海底地图构图方法,能够得到误差较小,地图一致性较高的海底先验地形图。该方法通过计算所测地形数据的出现概率(似然性),进行局部偏移的计算,修正路径从而得到较精确的多波束地图,可以实现对较深海域的地形测绘作业。
目前现有的多波束海底地形构图方法均需要依赖于与GPS卫星、岸基单元或长基线基阵的通信,这种通信不仅加大了成本,更限制了作业深度和距离。
公开日为2016年11月16日、公开号为CN106123850A、发明名称为“AUV配载多波束声呐水下地形测绘修正方法”的专利申请,,该方法需要得到首位准确相对位置,这就需要AUV在完成任务后重新回到起点或前往其他能精确定位的区域,增加了作业时间和成本。采用弹簧模型按照刚度进行误差分配的方法没有考虑误差的方向性。
发明内容
本发明的目的是为了提供一种基于局部偏移的AUV多波束数据构图方法。
本发明的目的是这样实现的:包括如下步骤:
步骤一:针对每一个时刻t的多波束地形数据和导航数据,使用前A个时刻的数据对该时刻t的多波束数据进行预测得到预测值,并使用预测值与实际值计算该时刻t的似然性θt,其中7≤A≤10;
步骤二:将每个时刻的似然性θt与预设的阈值进行比较:将似然性θt大于阈值的时刻作为存在局部偏移的时刻;若似然性θt小于阈值,t=t+1,返回步骤一;
步骤三、对所有存在局部偏移的时刻,分别沿AUV载体坐标系的xAUV轴正负方向移动一定距离并分别计算步骤一得到的预测值与每个距离对应地形数据的似然性,选择对应似然性最小值的距离作为局部偏移wt,判断当前时刻是否为最后时刻,若是最后时刻则进行步骤四,否者t=t+1,返回步骤一;
步骤四、考虑局部偏移对所有时刻的影响,计算新的航迹点位置;
步骤五、将所有航迹点连接起来作为修正后的路径;
步骤六、使用修正后的路径和每一时刻的多波束地形数据重新绘图。
本发明还包括这样一些结构特征:
1.步骤一包括:
第一:对每个时刻,根据导航数据,确定该时刻的多波束测线各测点的位置;
第二:针对每个测点,根据前A个时刻的多波束数据,采用高斯加权插值的方式计算该测点的水深值,其中7≤A≤10;
第三:根据第二步测得的每个测点水深值 和当前时刻实际测量的水深值zt,k,计算似然性θt:
其中:AUV惯性导航系统的路径节点坐标为 zt={zt,1,zt,2,...,zt,k,...,zt,N}表示t时刻所有N个测点的集合,p(zt|xt)是当前惯导指示位置是由上一点推算的实际位置的概率,N表示每一个时刻的测点个数,σt=diag(σt,1,σt,2,...,σt,k)是由t时刻N个测点水深值标准差组成的对角阵,zt,k表示t时刻第k条测点实际测量的水深值, 表示对应于zt,k位置由上一时刻推算出的水深值。
2.步骤四包括:
定义路径上存在两个局部偏移wt和wt+p分别位于t和t+p时刻,以t+1时刻为例,t+1时刻新的航迹点位置为:
式中: 是当前惯导指示位置是考虑局部位置wt之后由上一点推算的实际位置的概率;σt是由t时刻各测点的标准差组成的对角矩阵; 表示对应zt,k位置在考虑局部位移wt之后由上一时刻推算出的水深值;vt+1为t+1时刻xt+1位置的偏移;wt是t时刻的局部偏移,wt+p是t时刻之后第一个局部偏移; 为修正后t+1时刻新的航迹点位置。
与现有技术相比,本发明的有益效果是:本发明是在AUV导航数据本身存在误差情况下使用AUV多波束数据修正AUV导航数据并最终实现多波束数据构图的方法。本发明通过对局部偏移的提取和计算修正路径并绘制地图,能够不依赖于GPS等精确导航手段,在仅获得推位导航数据和多波束数据的情况下实现路径修正和高精确度地图绘制。
附图说明
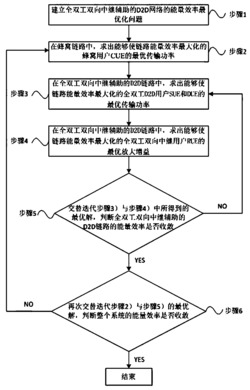
图1是本发明的流程图;
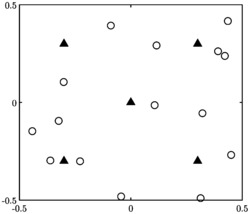
图2是本发明的坐标系图。
具体实施方式
下面结合附图与具体实施方式对本发明作进一步详细描述。
本发明的目的在于提供能够一种基于局部偏移的AUV多波束数据构图方法,首先是针对每一时刻的多波束地形数据和导航数据,使用前几个时刻的数据对该时刻的多波束数据进行预测,并使用预测值与实际值计算该时刻的似然性;然后将每个时刻的似然性与预设的阈值进行比较,大于阈值的时刻作为存在局部偏移的时刻,对该时刻,分别沿AUV载体坐标系x轴正负方向移动一定距离并分别计算步骤一得到的预测值与每个距离对应地形数据的似然性,选择对应似然性最小值的距离作为局部偏移。最后考虑局部偏移对所有时刻的影响,计算新的航迹点位置从而修正路径并最终重新绘制得到精确度较高的地图。
具体的说本发明是:
结合图1,本发明的具体流程如下:
步骤一、是针对t时刻的多波束地形数据和导航数据,使用前A个时刻(7≤A≤10)的数据对t时刻的多波束数据进行预测,并使用预测值与实际值计算该时刻的似然性θt.
步骤1.1、对t时刻,根据导航数据,确定t时刻的多波束测线各测点的位置。
步骤1.2、针对每个测点,根据前A个时刻(7≤A≤10)的多波束数据,采用高斯加权插值的方式计算该测点的水深值。
步骤1.3、根据上一步测得的每个测点水深值 和当前时刻实际测量的水深值zi,k,计算似然性θt。
假设AUV惯性导航系统的路径节点坐标为 AUV真实路径节点坐标为X={x0,x1,...,xn}。似然性θt为
式中,由于认为各个测点的测量之间是相互独立的,AUV惯性导航系统的路径节点坐标为 zt={zt,1,zt,2,...,zt,k,...,zt,N}表示t时刻所有N个测点的集合,σt=diag(σt,1,σt,2,...,σt,N)是由N个测点水深值标准差组成的对角阵,N表示t时刻的测点个数,zt,k表示第t时刻第k条测点获得的水深值, 表示对应于zt,k位置由上一时刻推算出的水深值,这个水深值是基于高斯加权插值得到的。 表示的是当前惯导指示位置是由上一点推算的实际位置的概率, 越大该段位移似然性越大。
步骤二、将t时刻的似然性θt与预设的阈值进行比较。若大于阈值,就作为存在局部偏移的时刻,进行步骤三;小于阈值的话,t=t+1,返回步骤一。
似然性的大小体现了预测值与实际值之间的差距,认为差距大于一定程度的时刻,该时刻的导航数据存在被干扰的可能,认为存在局部偏移。
步骤三、对t时刻,如图2所示,图2中载体坐标系为{xAUV,yAUV},大地坐标系为{x,y},G为AUV的重心位置,也是载体坐标系和大地坐标系的原点,局部偏移表示为wt。具体的说是分别沿xAUV轴正负方向移动一定距离并分别计算步骤一得到的预测值与每个距离对应地形数据的似然性,选择对应似然性最小值的距离作为局部偏移wt。判断当前时刻是否为最后时刻,若是则进行步骤四,否者t=t+1,返回步骤一。
步骤四、考虑局部偏移对所有时刻的影响,计算新的航迹点位置。
假设路径上存在两个局部偏移wt和wt+p分别位于航迹点xt和xt+p。在航迹点xt上,
式中,σt为t时刻各测点水深值标准差的对角阵,描述了 的离散程度,当 时,
假设t时刻的局部偏移对其后t+1,...,t+p-1时刻的影响是满足径向基函数(RBF),以t+1 时刻为例,满足
式中,δ1表示函数的宽度参数,控制了函数的径向作用范围。当σt较小即 较大时,认为wt更为可靠,可以加大其作用范围即取δ1为较大值。取 可以得到t+1时刻的局部偏移vt+1为:
那么,修正后位置 为
对所有航迹点完成计算之后,得到修正后AUV坐标
步骤五、将所有航迹点连接起来作为新的修正后的路径。
步骤六、使用修正后的路径和每一时刻的多波束地形数据重新绘图。
一种基于局部偏移的AUV多波束数据构图方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0