

IPC分类号 : F16F15/00I,F16F9/53I,F16M11/12I,F16M11/18I,B64D47/08I







专利摘要
本发明公开一种摆扫式航拍光电稳定装置,涉及无人机搭载平台辅助拍摄技术领域。外部减振机构通过连接板与载机连接,外框架系统通过外方位轴与外部减振机构连接,内框架系统通过螺钉紧固方式与外框架系统连接,且外框架系统与内框架系统之间设有保温夹层和电磁屏蔽膜。本发明优点在于外部减振机构通过电磁减振装置可有效隔绝载机及其他自然环境产生的振动,外框架系统可实现光电稳定装置的位姿补偿,内框架系统通过转动摆镜进行大范围、宽幅盖、高质量的扫描成像,保温夹层用于维持内框架系统的温度,抑制温度变化对反射镜面型精度的影响,电磁屏蔽膜可以削减自然环境以及光电稳定装置自身产生的电磁干扰对内框架系统的影响。
权利要求
1.一种摆扫式航拍光电稳定装置,其特征在于:包括外部减振机构、外框架系统和内框架系统,所述的外部减振机构通过螺栓与载机连接,所述的外框架系统通过外方位轴与外部减振机构连接,所述的内框架系统通过螺钉与外框架系统连接;
所述的外部减振机构包括连接板、球形铰链、减振架一、减振架二、销轴一、万向铰链一、万向铰链二、中心轴、万向铰链三、基座、电磁减振装置、销轴二、销轴三和惯导系统,所述的连接板通过螺钉与载机相连,所述的减振架一通过球形铰链与连接板连接,所述的球形铰链通过螺钉固定于连接板,所述的减振架二通过销轴一与减振架一连接,所述的基座通过万向铰链一与减振架二连接,所述的中心轴上端通过万向铰链二与连接板连接,中心轴下端通过万向铰链三与基座连接,所述的万向铰链一通过焊接与基座紧固连接,所述的万向铰链二通过焊接与连接板紧固连接,所述的万向铰链三通过焊接与基座紧固连接,所述的电磁减振装置上端通过销轴二与减振架一连接,其下端通过销轴三与减振架二连接,所述的惯导系统通过螺钉固定于基座上;
所述的外框架系统包括外方位框架、外俯仰框架、外横滚框架、外方位轴、外俯仰轴、外横滚轴、外俯仰轴承、外横滚轴承、伺服电机一和伺服电机二,所述的外方位框架通过外方位轴与外部减振机构连接,所述的外俯仰框架通过外俯仰轴与外方位框架连接,且连接处安装外俯仰轴承,所述的外横滚框架通过外横滚轴与外俯仰框架连接,且连接处安装外横滚轴承,所述的外俯仰轴与所述的伺服电机一直连连接,所述的外横滚轴与所述的伺服电机二直连连接,所述的伺服电机一通过螺钉与外方位框架紧固连接,所述的伺服电机二通过螺钉与外俯仰框架紧固连接。
2.根据权利要求1所述的一种摆扫式航拍光电稳定装置,其特征在于:所述的电磁减振装置包括转动块一、活塞、激光测距传感器、挡板、电磁线圈、工作腔、转动块二和复位弹簧,所述的活塞通过焊接与所述的转动块一固定连接,置于工作腔内,活塞上均匀、分布有四个细孔,所述的激光测距传感器通过螺钉固定在活塞杆上端,所述的挡板通过焊接固定于工作腔内部,所述的电磁线圈置于活塞内部,所述的工作腔通过焊接与所述的转动块二固定连接,所述的复位弹簧的上下端通过焊接分别固定在转动块一和转动块二之间。
3.根据权利要求1所述的一种摆扫式航拍光电稳定装置,其特征在于:所述的外方位框架包括承载板、回转支承齿轮、伺服电机三、传动齿轮、电机槽和轻量化槽,所述的承载板通过焊接固定于所述的外方位轴上,所述的回转支承齿轮的外环通过螺钉与承载板固定连接,其内环通过螺钉与外方位框架固定连接,所述的伺服电机三通过螺钉固定于电机槽,所述的传动齿轮通过键连接固定于伺服电机三上,且传动齿轮与回转支承齿轮啮合。
4.根据权利要求1所述的一种摆扫式航拍光电稳定装置,其特征在于:所述的外横滚框架包括保温夹层和电磁屏蔽膜,所述的保温夹层中放置有相变材料,所述的电磁屏蔽膜涂覆在所述的外横滚框架内部。
5.根据权利要求1所述的一种摆扫式航拍光电稳定装置,其特征在于:所述的内框架系统包括内框架、伺服电机四、内横滚轴、内横滚轴承、反射镜槽、反射镜、相机槽、CCD相机、承载架和平面透镜,所述的内框架通过螺钉与所述的外横滚框架连接,所述的伺服电机四通过螺钉与内框架连接,且与内横滚轴直连连接,所述的内横滚轴通过焊接与反射镜槽连接,所述的反射镜通过胶结固定于反射镜槽中,所述的相机槽通过螺钉与内框架固定连接,所述的CCD相机通过螺钉固定于相机槽中,所述的承载架通过螺钉固定于内框架上,所述的平面透镜通过胶结固定于承载架上。
说明书
技术领域
本发明涉及无人机搭载平台辅助拍摄技术领域,特别涉及一种摆扫式航拍光电稳定装置。
背景技术
随着科技的不断发展,近年来航拍无人机不断兴起,机载平台的稳定性也备受人们关注,机载平台是用于安装和固定摄像设备的支撑设备,用来控制摄像机或其它设备的转动方向,无人机复杂的工作环境对机载设备的稳定性造成很大的影响,导致无人机飞行过程中产生的振动较大,从而影响了航拍质量,因此机载平台削减振动和进行振动补偿的能力尤为重要。
无人机飞行过程中螺旋桨、发动机、旋翼等运动部件,会在机身上产生持续的、各个方向的振动,振动会极大的影响机载平台的工作状态,导致了框架间角度调节不准确、传感系统发出错误的信号、反射镜面型精度发生变化进而影响了拍摄质量,严重时可能造成元器件损坏,因此,需要一个减振系统对载机方向传来的振动进行削减,以提高无人机飞行过程中的稳定性和安全性。此外,现有的摆扫式光电吊舱大多使用整机摆扫的方式以实现对地扫描,如杨暄等人的期刊《机载摆扫式宽幅高光谱成像技术研究》中提出了这一方式,但是,该方式重量大,只能进行小角度的侧摆和俯仰,降低了相机成像的灵敏度,而且相机的机动成像过程较难控制,稳定性差,精度低,因此并不能很好的解决大视场成像的问题,从而影响成像质量。无人机在工作过程中也会受到外界温度变化的影响,温度对光机结构的影响方式主要是产生热变形,光学镜面发生变形,或者光学元件间相互位置发生变化,从而影响相机光学系统成像质量,且飞行中所遇到的强电磁干扰和平台本身的电子设备产生的电磁干扰也影响着机载光学元件的性能,从而影响了航拍的质量。
基于以上原因,现有机载平台面临的问题有以下几点:
(1)在现有的机载平台中,无人机飞行过程中会对机载平台产生的各个方向的振动,振动会导致框架间角度调节不准确、传感系统发出错误的信号、反射镜面型精度发生变化甚至可能造成元器件损坏,对整个机载平台的工作状态造成影响。
(2) 在现有的机载平台中,大多数的摆扫成像都是通过整机进行大角度摆扫,其中摆扫系统安装在横滚框架上,通过对翻转横滚框架进行摆扫,该方式重量大,只能进行小角度的侧摆和俯仰,降低了相机成像的灵敏度,而且相机的机动成像过程较难控制,稳定性差,精度低,因此并不能很好的解决大视场成像的问题,从而影响成像质量。
(3)在现有的机载平台中,由于工作过程中会受到外界温度变化对光机系统的影响,使得光学镜面发生变形,或者导致光学元件间相互位置发生变化,从而影响相机光学系统成像质量。
(4)在现有的机载平台中,外界的强电磁干扰以及平台自身其他电子元件工作时产生的强电磁干扰也影响着吊舱中的光学设备,使得成像质量下降。
发明内容
本发明提供一种基于三轴六框架机构的摆扫式航拍光电稳定装置,以解决在载机飞行过程中遇到的机体本身的振动、冲击和外在环境的扰动,以及环境产生的温度变化和强电磁干扰等因素的影响。
本发明采取的技术方案是包括外部减振机构、外框架系统和内框架系统,所述的外部减振机构通过螺栓与载机连接,所述的外框架系统通过所述的外方位轴与外部减振机构连接,所述的内框架系统通过螺钉与外框架系统连接。
本发明所述的外部减振机构包括连接板、球形铰链、减振架一、减振架二、销轴一、万向铰链一、万向铰链二、中心轴、万向铰链三、基座、电磁减振装置、销轴二、销轴三和惯导系统一,所述的连接板通过螺钉与载机相连,所述的减振架一通过球形铰链与连接板连接,所述的球形铰链通过螺钉固定于连接板,所述的减振架二通过销轴一与减振架一连接,所述的基座通过万向铰链一与减振架二连接,所述的中心轴上端通过万向铰链二与连接板连接,中心轴下端通过万向铰链三与基座连接,所述的万向铰链一通过焊接与基座紧固连接,所述的万向铰链二通过焊接与连接板紧固连接,所述的万向铰链三通过焊接与基座紧固连接,所述的电磁减振装置上端通过销轴二与减振架一连接,其下端通过销轴三与减振架二连接,所述的惯导系统一通过螺钉固定于基座上。
本发明所述的电磁减振装置包括转动块一、活塞、激光测距传感器、挡板、电磁线圈、工作腔、转动块二和复位弹簧,所述的活塞通过焊接与所述的转动块一固定连接,置于工作腔内,活塞上均匀、分布有四个细孔,所述的激光测距传感器通过螺钉固定在活塞杆上端,所述的挡板通过焊接固定于工作腔内部,所述的电磁线圈置于活塞内部,所述的工作腔通过焊接与所述的转动块二固定连接,所述的复位弹簧的上下端通过焊接分别固定在转动块一和转动块二之间。
本发明所述的外框架系统包括外方位框架、外俯仰框架、外横滚框架、外方位轴、外俯仰轴、外横滚轴、外俯仰轴承、外横滚轴承、伺服电机一和伺服电机二,所述的外方位框架通过外方位轴与外部减振机构连接,所述的外俯仰框架通过外俯仰轴与外方位框架连接,且连接处安装外俯仰轴承,所述的外横滚框架通过外横滚轴与外俯仰框架连接,且连接处安装外横滚轴承,所述的外俯仰轴与所述的伺服电机一直连连接,所述的外横滚轴与所述的伺服电机二直连连接,所述的伺服电机一通过螺钉与外方位框架紧固连接,所述的伺服电机二通过螺钉与外俯仰框架紧固连接。
本发明所述的外方位框架包括承载板、回转支承齿轮、伺服电机三、传动齿轮、电机槽和轻量化槽,所述的承载板通过焊接固定于所述的外方位轴上,所述的回转支承齿轮外环通过螺钉与承载板固定连接,其内环通过螺钉与外方位框架固定连接,所述的伺服电机三通过螺钉固定于电机槽,所述的传动齿轮通过键连接固定于伺服电机三上,且传动齿轮与回转支承齿轮啮合。
本发明所述的外横滚框架包括保温夹层和电磁屏蔽膜,所述的保温夹层中放置有相变材料,所述的电磁屏蔽膜涂覆在所述的外横滚框架内部。
本发明所述的内框架系统包括内框架、伺服电机四、内横滚轴、内横滚轴承、反射镜槽、反射镜、相机槽、CCD相机、承载架和平面透镜,所述的内方位框架通过螺钉与所述的外横滚框架连接,所述的伺服电机四通过螺钉与内框架连接,且与内横滚轴直连连接,所述的内横滚轴通过焊接与反射镜槽连接,所述的反射镜通过胶结固定于反射镜槽中,所述的相机槽通过螺钉与内框架固定连接,所述的CCD相机通过螺钉固定于相机槽中所述的承载架通过螺钉固定于内框架上,所述的平面透镜通过胶结固定于承载架上。
本发明的优点:
(1) 本发明采用外部减振机构对载机及其他自然因素产生的各个方向的的振动进行削减,由于载机为主要振源,外部减振机构的中心轴可以单独对载机方向产生的轴向振动进行削减,采用电磁减振装置,通过改变流经电磁线圈的电流大小,进而改变磁场的大小,磁场的改变影响着磁流变液固化程度,进而改变阻尼的大小,电磁减振装置还配有激光测距传感器和惯导系统,致使电磁减振装置响应速度更快更精确。
(2)本发明采用旋转反射镜进行摆扫,相机固定在框架上,摆扫轴支撑反射镜,且相对独立,受干扰较小,此方式摆扫轴承载质量较小,精度高,可以很好的实现无人机航拍对大视场、宽幅盖的需求,且稳定性大大提高,三轴三框架系统可以实现光电吊舱的位姿补偿,用于对摆扫成像起一个辅助作用,使无人机航拍更精确,质量更高。
(3)摆扫式航拍光电稳定装置内外框架之间设置有保温夹层,保温夹层中设置有相变材料,当外界温度变化时,相变材料通过改变自身的物质状态,实现吸收或释放热量,从而实现对内部光机系统进行保温,利于相变材料吸热或放热。
(4)摆扫式航拍光电稳定装置内外框架之间涂覆电磁屏蔽膜,可以对外界的强电磁干扰和平台自身电子设备产生的强电磁干扰进行屏蔽,避免其影响到平台内部的光学设备,造成成像质量下降。
附图说明
图1是本发明的结构示意图
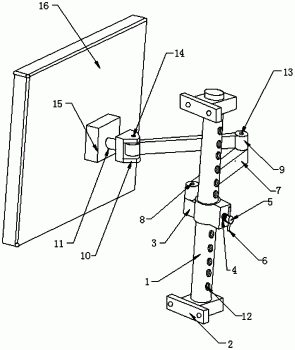
图2是本发明的轴测图
图3是本发明外部减振机构示意图
图4是本发明电磁减振装置示意图
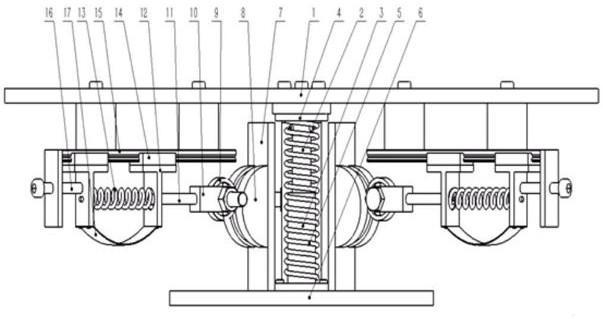
图5是本发明电磁减振装置剖视图
图6是本发明活塞剖视图
图7是本发明外框架系统正面剖视图
图8是本发明外框架系统侧面剖视图
图9是本发明外方位框架剖视图
图10是本发明回转支承齿轮结构图
图11是本发明外方位框架俯视图
图12是本发明外横滚框架剖视图
图13是本发明内框架系统示意图
图14是本发明反射镜结构示意图
图15是本发明平面透镜结构示意图
附图标记说明:外部减振机构1、外框架系统2、内框架系统3、连接板1-1、球形铰链1-2、减振架一1-3、减振架二1-4、销轴1-5、万向铰链一1-6、万向铰链二1-7、万向铰链三1-8、中心轴1-9、基座1-10、电磁减振装置1-11、惯导系统1-12、销轴二1-13、销轴三1-14,转动块一1-11-1、活塞1-11-2、细孔1-11-2-1、挡板1-11-3、电磁线圈1-11-4、工作腔1-11-5、转动块二1-11-6、复位弹簧1-11-7、激光测距传感器1-11-8、外方位框架2-1、外俯仰框架2-2、外横滚框架2-3、外方位轴2-1-1、外俯仰轴2-2-1、外横滚轴2-3-1、外俯仰轴承2-2-2、外横滚轴承2-3-2、伺服电机一2-2-3、伺服电机二2-3-3、回转支承齿轮2-1-6、传动齿轮2-1-2、伺服电机三2-1-3、电机槽一2-1-4、承载板2-1-5、轻量化槽2-1-7、保温夹层2-3-4、电磁屏蔽膜2-3-5、内框架3-1、伺服电机四3-2、内横滚轴3-3、内横滚轴承3-4、反射镜槽3-5、反射镜3-6、相机槽3-7、CCD相机3-8、承载架3-9和平面透镜3-10。
具体实施方式
如图1和图2所示,本发明提出一种摆扫式航拍光电稳定装置,包括外部减振机构1、外框架系统2和内框架系统3,其中外部减振机构1通过连接板1-1固定在载机上,
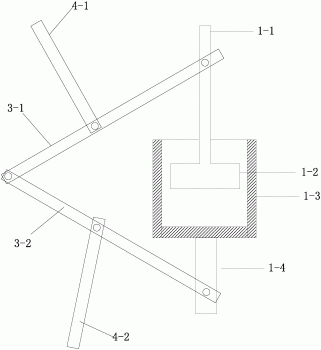
如图3和图4所示,所述的外部减振机构1包括连接板1-1、球形铰链1-2、减振架一1-3、减振架二1-4、销轴一1-5、万向铰链一1-6、万向铰链二1-7、万向铰链三1-8、中心轴1-9、基座1-10、电磁减振装置1-11、惯导系统1-12、销轴二1-13和销轴三1-14,所述的连接板1-1通过螺钉与载机相连,用于将摆扫式航拍光电稳定装置固定于载机上,所述的球形铰链1-2通过螺钉固定于连接板1-1上,所述的减振架一1-3通过球形铰链1-2与连接板1-1连接,所述的减振架二1-4通过销轴1-5和减振架一1-3连接,当载机产生振动并传递至外部减振框架1时,减振架一1-3和减振架二1-4之间的角度发生改变,形成绕销轴1-5的相对转动,其目的在于将振动传递至电磁减振装置1-11,减振架二1-4通过万向铰链一1-6与基座1-10连接,所述的万向铰链一1-6通过焊接与基座1-10连接,所述的中心轴1-9上端通过所述的万向铰链二1-7与连接板1-1连接,所述的万向铰链二1-7通过焊接与连接板1-1连接,中心轴1-9下端通过所述的万向铰链三1-8与所述的基座1-10连接,所述的万向铰链三1-8通过焊接与基座1-10连接,中心轴1-9
如图5和图6所示,所述的电磁减振装置1-11包括转动块一1-11-1、活塞1-11-2、细孔1-11-2-1、挡板1-11-3、电磁线圈1-11-4、工作腔1-11-5、转动块二1-11-6、复位弹簧1-11-7和激光测距传感器1-11-8,所述的活塞1-11-2通过焊接与所述的转动块一1-11-1固定连接,置于所述的工作腔1-11-5内,所述的细孔1-11-2-1共四个,均匀分布活塞1-11-2上,工作腔1-11-5中的磁流变液经由活塞1-11-2上的细孔1-11-2-1流通,所述的激光测距传感器1-11-8通过螺钉固定于活塞1-11-2杆上端,通过激光测量其与挡板1-11-3之间的距离,进而采集振动信息,并发出信号,所述的挡板1-11-3焊接在工作腔1-11-5内部,防止磁流变液流出工作腔1-11-5,所述的电磁线圈1-11-4置于活塞1-11-2内部,所述的工作腔1-11-5通过焊接与所述的转动块二1-11-6固定连接,用于存储磁流变液,所述的复位弹簧1-11-7套绕在工作腔1-11-5外部,当振动经由转动块二1-11-6传递至复位弹簧时,复位弹簧1-11-7的弹性形变会给予转动块二1-11-6一个反向的力用于复位,同时对振动起到被动削减作用,
如图7和图8所示,所述的外框架系统2包括外方位框架2-1、外俯仰框架2-2、外横滚框架2-3、外方位轴2-1-1、外俯仰轴2-2-1、外横滚轴2-3-1、外俯仰轴承2-2-2、外横滚轴承2-3-2、伺服电机一2-2-3和伺服电机二2-3-3,所述的外方位框架2-1通过外方位轴2-1-1与所述的外部减振机构1连接,所述的外俯仰框架2-2通过外俯仰轴2-2-1与外方位框架2-1连接,且连接处安装有外俯仰轴承2-2-2,通过所述的伺服电机一2-2-3驱动外俯仰轴2-2-1带动外俯仰框架2-2旋转,
如图9、图10和图11所示,所述的外方位框架2-1包括承载板2-1-5、回转支承齿轮2-1-6、电机槽2-1-4、伺服电机三2-1-3、传动齿轮2-1-2和轻量化槽2-1-7,所述的承载板2-1-5通过焊接与所述的外方位轴2-1-1固定连接,所述的回转支承齿轮2-1-6外环通过螺钉与承载板2-1-5固定连接,其内环通过螺钉与外方位框架2-1固定连接,所述的伺服电机三2-1-3通过螺钉固定于所述的电机槽2-1-4,所述的传动齿轮2-1-2通过键连接固定于伺服电机三2-1-3上,且传动齿轮2-1-2与回转支承齿轮2-1-6啮合,由伺服电机三2-1-3驱动传动齿轮2-1-2,由于回转支承齿轮2-1-6外环固定,所以给予传动齿轮2-1-2一个反向的力,致使传动齿轮2-1-2和伺服电机三2-1-3推动外方位框架2-1绕回转支承齿轮2-1-6旋转,回转支承齿轮2-1-6内环与外方位框架2-1固定,回转支承齿轮2-1-6内环跟随外方位框架2-1旋转,回转支承齿轮2-1-6内外环之间设置有轴承,便于外方位框架2-1运动,外方位框架2-1的转动用于对摆扫式航拍光电稳定装置在方位轴方向进行视场调整和位姿补偿。
如图12所示,所述的外横滚框架2-3包括保温夹层2-3-4和电磁屏蔽膜2-3-5,所述的保温夹层2-3-4为中空结构,保温夹层2-3-4中放置有相变材料,在外界温度发生变化时,相变材料物质状态发生改变,在这个过程中相变材料将会吸收或释放大量的潜热,
综上所述,飞行过程中,载机和其他自然因素会产生多方向的振动,振动将会对航拍质量产生极大的影响,当振动传递至外部减振机构1时,激光测距传感器1-11-8通过测量其与挡板1-11-3的距离,进而测量振动的强弱程度,激光测距传感器1-11-8发出信号,信号由惯导系统1-12接收,并实施控制,通过调节流经电磁线圈1-11-4的电流的大小,进而改变磁场的大小,从而改变磁流变液的固化程度,起到减振的作用,此外,飞行过程中其他自然因素易对摆扫式航拍光电稳定装置的位置、姿态产生影响,外框架系统2用于对位姿进行补偿,内框架系统3用于摆扫成像,大多摆扫成像装置使用框架进行摆扫,该方式重量大,只能进行小角度的侧摆和俯仰,降低了相机成像的灵敏度,而且相机的机动成像过程较难控制,稳定性差,精度低,本发明通过摆扫反射镜3-6实现航拍成像,摆扫轴承载质量较小,精度高,可以很好的实现无人机航拍对大视场、宽幅盖的需求,且稳定性大大提高。
一种摆扫式航拍光电稳定装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0