

IPC分类号 : E21D9/10I,E21D20/00I,E21B15/00I,E21D19/00I








专利摘要
本发明公开了一种井下快速掘进的探掘支锚运一体机系统及其使用方法,该一体机系统包括纵轴式掘进机体,所述纵轴式掘进机体上设置有双摇臂截割部、配有自动换杆机构的锚支部、用于起到临时支护和防护锚支部作用的挡板、用于预探测的探测部,设置有探测部,可以进行先探测再施钻,提高了安全性和工作效率;回转电机一、回转电机二、电机液压缸共同构成一个类人腕关节,使得锚杆钻机操作更加灵活,更能适应井下复杂的工作环境,护板结构的设置解决了现有巷道掘进过程中掘、支、锚时间不匹配的问题,大大提高了掘进效率,设置有自动换杆机构,可以自动进行锚杆的换杆输送,大大提高了工作效率。
权利要求
1.一种井下快速掘进的探掘支锚运一体机系统,其特征在于,包括纵轴式掘进机体(1),所述纵轴式掘进机体(1)上设置有双摇臂截割部(2)、配有自动换杆机构的锚支部(3)、用于起到临时支护和防护锚支部作用的挡板(4)、用于预探测的探测部(5),所述双摇臂截割部(2)包括焊接在所述纵轴式掘进机体(1)上的摇臂电机固定支架(2.6),所述摇臂电机固定支架(2.6)上固定有摇臂电机(2.4),所述摇臂电机(2.4)通过转动油缸(2.5)与主摇臂(2.3)连接,所述主摇臂(2.3)通过转动副与次摇臂(2.2)连接,所述转动副通过设置在主摇臂(2.3)内的传动系统与摇臂电机(2.4)连接,所述次摇臂(2.2)上设置有截割电机(2.1),所述截割电机(2.1)上安装有截割头;所述锚支部(3)包括焊接在所述纵轴式掘进机体(1)两侧的锚支部底板(3.2),所述锚支部底板(3.2)上通过滑轨连接有进给滑块(3.1),所述进给滑块(3.1)上铰接设置有可上下俯仰的俯仰滑轨(3.3),所述俯仰滑轨(3.3)上对应设置有俯仰滑块(3.4),所述俯仰滑轨(3.3)采用安装在进给滑块(3.1)上的锚支部俯仰液压缸(3.5)驱动,所述俯仰滑块(3.4)上设置有回转电机二(3.8),所述回转电机二(3.8)铰接设置有回转电机一(3.6),所述回转电机二(3.8)上设置有驱动回转电机一(3.6)上下俯仰的电机液压缸(3.7),所述回转电机一(3.6)通过锚杆钻机滑块(3.9)连接有锚杆钻机,所述锚杆钻机通过齿轮齿条相对于锚杆钻机滑块(3.9)滑动,所述锚杆钻机上设置有自动换杆机构(3.10),所述自动换杆机构(3.10)包括与锚杆钻机焊接的换杆机架(3.10.6),所述换杆机架(3.10.6)通过连接板连接有锚杆仓(3.10.1),所述连接板上设置有用于驱动锚杆仓(3.10.1)转动的转仓液压缸(3.10.4)、与转仓液压缸(3.10.4)对应的限位液压缸(3.10.5),所述锚杆仓(3.10.1)下部对应设置有焊接在换杆机架(3.10.6)上的机械爪架(3.10.8),所述机械爪架(3.10.8)通过夹紧液压缸(3.10.3)与夹紧块(3.10.7)连接,所述夹紧块(3.10.7)连接有送杆液压缸(3.10.2)的一端,所述送杆液压缸(3.10.2)的另一端与机械爪架(3.10.8)铰接;所述挡板包括焊接在所述纵轴式掘进机体(1)后侧的挡板底板,所述挡板底板上通过挡板滑轨(4.7)滑动设置有挡板滑板(4.4),所述挡板滑板(4.4)采用安装在所述挡板底板上的挡板进退液压缸(4.8)驱动滑动,所述挡板滑板(4.4)上铰接设置有可上下俯仰的挡板一(4.3),所述挡板一(4.3)采用安装在所述挡板滑板(4.4)上的挡板俯仰液压缸(4.6)驱动,所述挡板一(4.3)上铰接设置有用于起到安装锚网和临时支护作用的挡板二(4.2),所述挡板二(4.2)采用安装在挡板一(4.3)上的挡板调平液压缸(4.5)驱动调平;所述探测部(5)包括固定在所述纵轴式掘进机体(1)上的固定滑道,所述固定滑道上对应设置有伸缩臂滑台(5.10),所述伸缩臂滑台(5.10)通过设置在纵轴式掘进机体(1)上的伸缩油缸(5.11)驱动滑动,所述伸缩臂滑台(5.10)上设置有伸缩臂基座(5.9),所述伸缩臂基座(5.9)通过调整液压缸一(5.7)、调整液压缸二(5.8)与大臂(5.6)连接,所述大臂(5.6)与小臂(5.5)连接,所述小臂(5.5)通过连接件(5.3)与转动油缸(5.2)连接,所述转动油缸(5.2)连接有钻机滑动平台(5.1),所述钻机滑动平台(5.1)上设置有探测钻机,所述小臂(5.5)与连接件(5.3)之间连接有用于调节连接件(5.3)俯仰程度的关节液压缸(5.4)。
2.根据权利要求1所述的一种井下快速掘进的探掘支锚运一体机系统,其特征在于,所述锚支部俯仰液压缸(3.5)、电机液压缸(3.7)、挡板调平液压缸(4.5)、挡板俯仰液压缸(4.6)、挡板进退液压缸(4.8)、转动油缸(5.2)、关节液压缸(5.4)、调整液压缸一(5.7)、调整液压缸二(5.8)、伸缩油缸(5.11)均采用伺服液压缸,所述回转电机一(3.6)、回转电机二(3.8)采用回转编码器控制旋转角度。
3.根据权利要求1所述的一种井下快速掘进的探掘支锚运一体机系统,其特征在于,所述挡板二(4.2)前部设置有弧形网状结构(4.1)。
4.根据权利要求1所述的一种井下快速掘进的探掘支锚运一体机系统,其特征在于,所述挡板一(4.3)的俯仰与挡板二(4.2)的调平运动同步运行。
5.根据权利要求1所述的一种井下快速掘进的探掘支锚运一体机系统,其特征在于,所述挡板一(4.3)的俯仰幅度为10度到80度,所述挡板二(4.2)与挡板一(4.3)之间的调整幅度为120度到180度。
6.一种使用如权利要求1-5任一项所述的一种井下快速掘进的探掘支锚运一体机系统的方法,其特征在于,包括以下步骤:
(a)将纵轴式掘进机体(1)行进到巷道断面处,前后支撑撑开,工作人员将锚网放置到挡板二(4.2)上,挡板一(4.3)、挡板二(4.2)在两组液压缸的动作下完成升起、调平的动作,挡板滑板(4.4)前进,挡板(4)进行临时支护;
(b)探测部(5)的伸缩油缸(5.11)运动带动伸缩臂滑台(5.10)在固定滑道上运动,进而带动伸缩臂基座(5.9)的运动,从而使探测钻机前后移动,进行探测,控制转动油缸(5.2)带动钻机滑动平台(5.1)旋转进而调整探测钻机探测范围,通过控制调整液压缸一(5.7)、调整液压缸二(5.8)调整大臂(5.6)的位姿,进而带动小臂(5.5)调整位姿,实现探测钻机的小幅度伸缩,通过控制关节液压缸(5.4)可以带动连接件(5.3)实现俯仰动作,进而实现探测电机的俯仰动作,实现探测部的探测;
(c)探测完成后,可以进行截割时,双摇臂截割部(2)的转动油缸(2.5)和摇臂电机(2.4)协同控制双摇臂机构,使得截割头开始沿S形截割巷道断面;
(d)在步骤(b)进行的同时,锚支部(3)的进给滑块(3.1)通过齿轮齿条推动往前运动指定距离,锚支部俯仰液压缸(3.5)伸长至设定距离,反馈控制其停止伸长,使俯仰滑轨(3.3)摆动到指定角度,回转电机一(3.6)、回转电机二(3.8)、电机液压缸(3.7)三者共同动作,使得锚杆钻机的位姿至指定位姿,锚杆钻机进行打锚杆的动作,将锚网支护到巷道顶板上;
(e)在截割头完成一轮S形截割断面后,锚支部(3)的回转电机二(3.8)逆时针摆动一定角度,自动换杆机构(3.10)开始运行,转仓液压缸(3.10.4)运动,带动锚仓杆(3.10.1)转动到限位液压缸(3.10.5)限定的角度,夹紧液压缸(3.10.3)驱动夹紧块(3.10.7)夹紧锚杆,送杆液压缸(3.10.2)运行将锚杆输送到锚杆钻机,夹紧块(3.10.7)松开,打下一根锚杆;
(f)锚支部(3)完成一个断面上的打锚杆后,挡板滑板(4.4)后移,挡板滑板(4.4)退出临时支护,进给滑块(3.1)前移,进行下一个断面的锚杆支护;
(g)截割头回收到初始位置,锚支部(3)的进给滑块(3.1)后退到底,锚支部俯仰液压缸(3.5)、回转电机一(3.6)、回转电机二(3.8)、电机液压缸(3.7)动作,锚支部(3)回到初始位置,纵轴式掘进机体(1)前后支撑缩回,纵轴式掘进机体(1)前进到下一个巷道断面处,重复步骤(a)-(g)动作。
说明书
技术领域
本发明涉及矿山机械领域技术领域,尤其涉及一种井下快速掘进的探掘支锚运一体机系统及其使用方法。
背景技术
随着生产矿井采深的增加,地应力、围岩受力及变形复杂多样,锚网支护以其支护效果好、适用范围广、可以根据巷道条件灵活应变等特点,被广大巷道开采所使用,但在目前巷道掘进的过程中, 机械化掘进效率很高,巷道支护速度远远滞后于掘进速度。掘支锚时间严重不匹配,导致掘进机进尺时间远小于工作总时间,大量的时间内掘进机停工作业用来进行支护作业。解决掘支锚时间严重不匹配的一个方向为实现掘支锚平行作业。
CN104500086A中公开了专利名称为:一种巷道无人掘锚一体机。其支护系统就只涉及临时支护与锚杆支护,不能解决小块围岩掉落的问题,如果需要加装锚网需要人工靠近工作断面,为了人员安全截割头需要停工,不能实现掘支锚平行作业,同时粉尘、噪音等因素也对工人存在极大的安全威胁。,而且大都不能进行预探测,也没有自动换锚杆机构,安全性不高,工作效率低。
发明内容
为解决上述问题,本发明提供一种井下快速掘进的探掘支锚运一体机系统。
为实现上述目的,本发明采用以下技术手段:
本发明提供一种井下快速掘进的探掘支锚运一体机系统,包括纵轴式掘进机体,所述纵轴式掘进机体上设置有双摇臂截割部、配有自动换杆机构的锚支部、用于起到临时支护和防护锚支部作用的挡板、用于预探测的探测部。
进一步的,所述双摇臂截割部包括焊接在所述纵轴式掘进机体上的摇臂电机固定支架,所述摇臂电机固定支架上固定有摇臂电机,所述摇臂电机通过转动油缸与主摇臂连接,所述主摇臂通过转动副与次摇臂连接,所述转动副通过设置在主摇臂内的传动系统与摇臂电机连接,所述次摇臂上设置有截割电机,所述截割电机上安装有截割头;所述锚支部包括焊接在所述纵轴式掘进机体两侧的锚支部底板,所述锚支部底板上通过滑轨连接有进给滑块,所述进给滑块上铰接设置有可上下俯仰的俯仰滑轨,所述俯仰滑轨上对应设置有俯仰滑块,所述俯仰滑轨采用安装在进给滑块上的锚支部俯仰液压缸驱动,所述俯仰滑块上设置有回转电机二,所述回转电机二铰接设置有回转电机一,所述回转电机二上设置有驱动回转电机一上下俯仰的电机液压缸,所述回转电机一通过锚杆钻机滑块连接有锚杆钻机,所述锚杆钻机通过齿轮齿条相对于锚杆钻机滑块滑动,所述锚杆钻机上设置有自动换杆机构,所述自动换杆机构包括与锚杆钻机焊接的换杆机架,所述换杆机架通过连接板连接有锚杆仓,所述连接板上设置有用于驱动锚杆仓转动的转仓液压缸、与转仓液压缸对应的限位液压缸,所述锚杆仓下部对应设置有焊接在换杆机架上的机械爪架,所述机械爪架通过夹紧液压缸与夹紧块连接,所述夹紧块连接有送杆液压缸的一端,所述送杆液压缸的另一端与机械爪架铰接;所述挡板包括焊接在所述纵轴式掘进机体后侧的挡板底板,所述挡板底板上通过挡板滑轨滑动设置有挡板滑板,所述挡板滑板采用安装在所述挡板底板上的挡板进退液压缸驱动滑动,所述挡板滑板上铰接设置有可上下俯仰的挡板一,所述挡板一采用安装在所述挡板滑板上的挡板俯仰液压缸驱动,所述挡板一上铰接设置有用于起到安装锚网和临时支护作用的挡板二,所述挡板二采用安装在挡板一上的挡板调平液压缸驱动调平;所述探测部包括固定在所述纵轴式掘进机体上的固定滑道,所述固定滑道上对应设置有伸缩臂滑台,所述伸缩臂滑台通过设置在纵轴式掘进机体上的伸缩油缸驱动滑动,所述伸缩臂滑台上设置有伸缩臂基座,所述伸缩臂基座通过调整液压缸一、调整液压缸二与大臂连接,所述大臂与小臂连接,所述小臂通过连接件与转动油缸连接,所述转动油缸连接有钻机滑动平台,所述钻机滑动平台上设置有探测钻机,所述小臂与连接件之间连接有用于调节连接件俯仰程度的关节液压缸。
进一步的,所述锚支部俯仰液压缸、电机液压缸、挡板调平液压缸、挡板俯仰液压缸、挡板进退液压缸、转动油缸、关节液压缸、调整液压缸一、调整液压缸二、伸缩油缸均采用伺服液压缸,所述回转电机一、回转电机二采用回转编码器控制旋转角度。
进一步的,所述挡板二前部设置有弧形网状结构。
进一步的,所述挡板一的俯仰与挡板二的调平运动同步运行。
进一步的,所述挡板一的俯仰幅度为10度到80度,所述挡板二与挡板一之间的调整幅度为120度到180度。
本发明还提供一种使用上述系统的方法,具体包括以下步骤:
(a)将纵轴式掘进机体行进到巷道断面处,前后支撑撑开,工作人员将锚网放置到挡板二上,挡板一、挡板二在两组液压缸的动作下完成升起、调平的动作,挡板滑板前进,挡板进行临时支护;
(b)探测部的伸缩油缸运动带动伸缩臂滑台在固定滑道上运动,进而带动伸缩臂基座的运动,从而使探测钻机前后移动,进行探测,控制转动油缸带动钻机滑动平台旋转进而调整探测钻机探测范围,通过控制调整液压缸一、调整液压缸二调整大臂的位姿,进而带动小臂调整位姿,实现探测钻机的小幅度伸缩,通过控制关节液压缸可以带动连接件实现俯仰动作,进而实现探测电机的俯仰动作,实现探测部的探测;
(c)探测完成后,可以进行截割时,双摇臂截割部的转动油缸和摇臂电机协同控制双摇臂机构,使得截割头开始沿S形截割巷道断面;
(d)在步骤进行的同时,锚支部的进给滑块通过齿轮齿条推动往前运动指定距离,锚支部俯仰液压缸伸长至设定距离,反馈控制其停止伸长,使俯仰滑轨摆动到指定角度,回转电机一、回转电机二、电机液压缸三者共同动作,使得锚杆钻机的位姿至指定位姿,锚杆钻机进行打锚杆的动作,将锚网支护到巷道顶板上;
(e)在截割头完成一轮S形截割断面后,锚支部的回转电机二逆时针摆动一定角度,自动换杆机构开始运行,转仓液压缸运动,带动锚仓杆转动到限位液压缸限定的角度,夹紧液压缸驱动夹紧块夹紧锚杆,送杆液压缸运行将锚杆输送到锚杆钻机,夹紧块松开,打下一根锚杆;
(f)锚支部完成一个断面上的打锚杆后,挡板滑板后移,挡板滑板退出临时支护,进给滑块前移,进行下一个断面的锚杆支护;
(g)截割头回收到初始位置,锚支部的进给滑块后退到底,锚支部俯仰液压缸、回转电机一、回转电机二、电机液压缸动作,锚支部回到初始位置,纵轴式掘进机体前后支撑缩回,纵轴式掘进机体前进到下一个巷道断面处,重复步骤(a)-(g)动作。
本发明的有益效果:本发明结构简单,设置有探测部,可以进行先探测再施钻,提高了安全性和工作效率;回转电机一、回转电机二、电机液压缸共同构成一个类人腕关节,使得锚杆钻机操作更加灵活,更能适应井下复杂的工作环境,护板结构的设置解决了现有巷道掘进过程中掘、支、锚时间不匹配的问题,大大提高了掘进效率,设置有自动换杆机构,可以自动进行锚杆的换杆输送,大大提高了工作效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
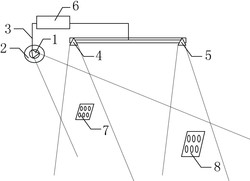
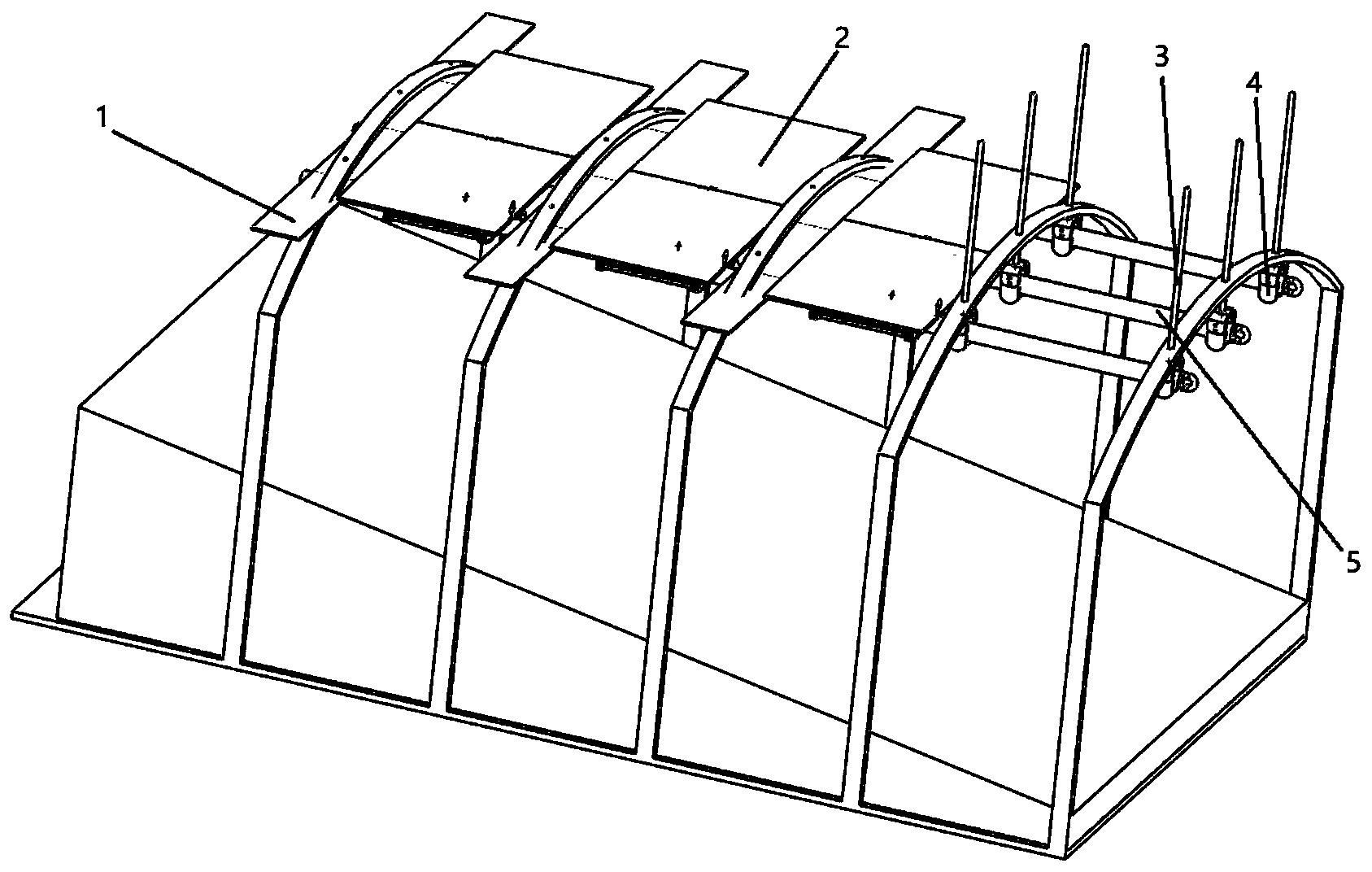
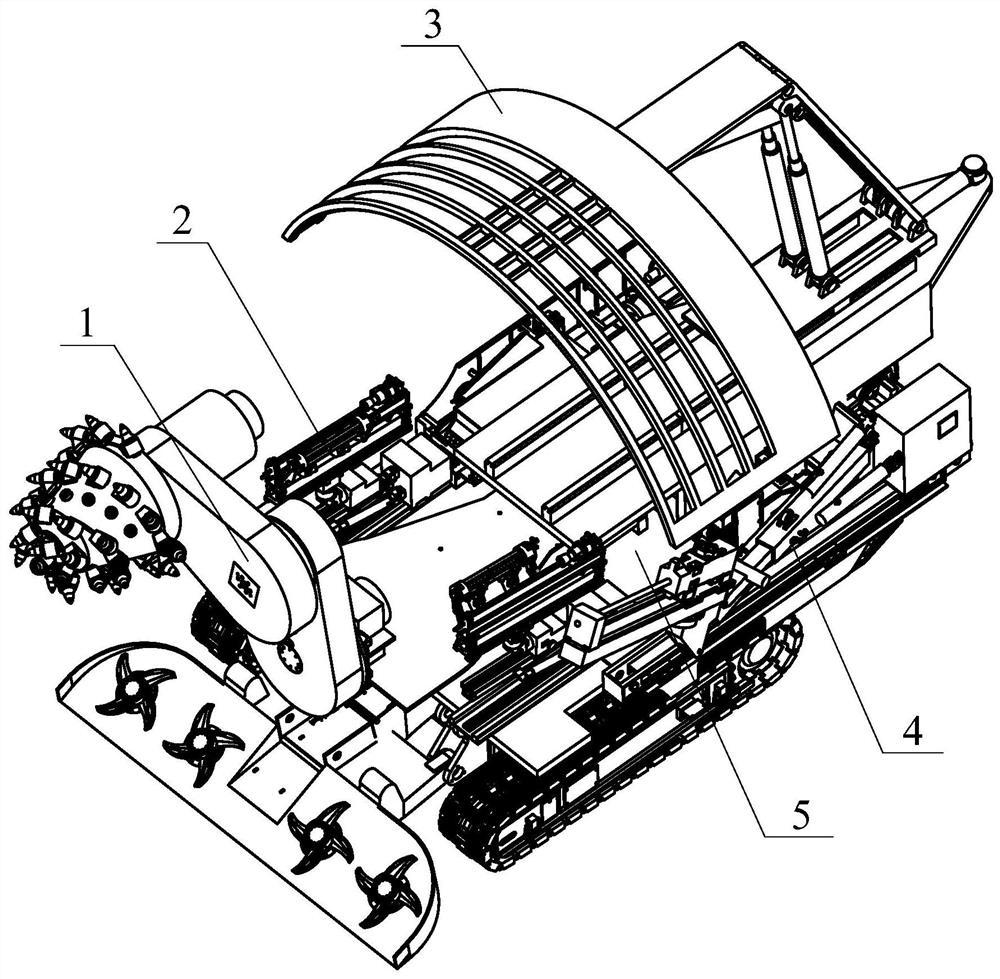
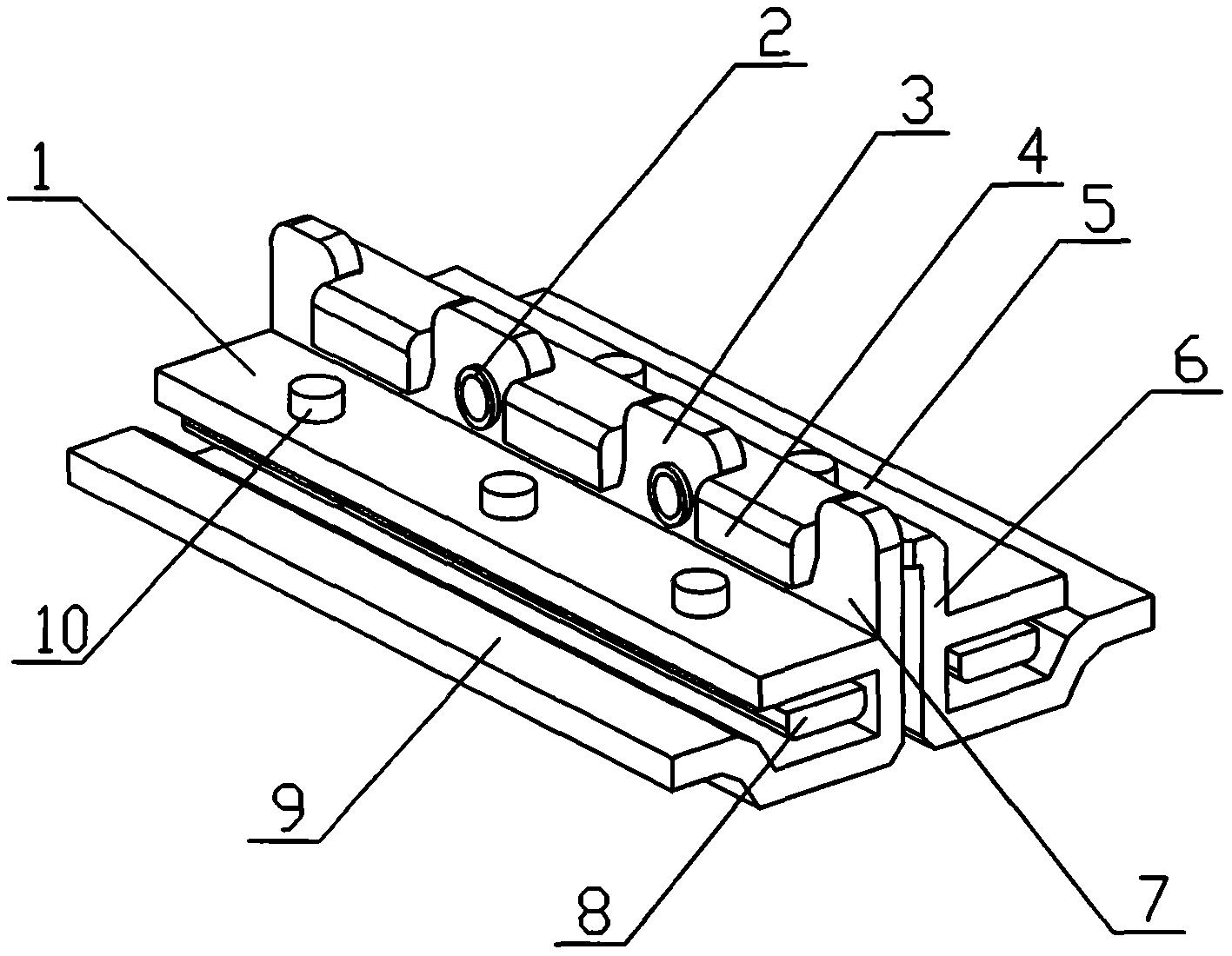
图1为本发明的整体结构示意图;
图2为本发明中双摇臂截割部的结构示意图;
图3为本发明中锚支部的结构示意图;
图4为本发明中挡板的结构示意图;
图5为本发明中探测部的结构示意图;
图6为图2双摇臂截割部内部传动系统示意图;
图7为图3自动换杆结构示意图;
图8为图7自动换杆机械爪结构示意图。
图中:1纵轴式掘进机体;2双摇臂截割部;2.1截割电机;2.2次摇臂;2.3主摇臂;2.4摇臂电机;2.5转动油缸;2.6固定支架;3锚支部;3.1进给滑块;3.2锚支部底板;3.3俯仰滑轨;3.4俯仰滑块;3.5锚支部俯仰液压缸;3.6回转电机一;3.7电机液压缸;3.8回转电机二2;3.9锚杆钻机滑块;3.10自动换杆机构;3.10.1锚杆仓;3.10.2送杆液压缸;3.10.3夹紧液压缸;3.10.4转仓液压缸;3.10.5限位液压缸;3.10.6换杆机架;3.10.7夹紧块;3.10.8机械爪架4挡板;4.1挡板底板;4.2挡板二;4.3挡板一;4.4挡板滑板2;4.5挡板调平液压缸;4.6挡板俯仰液压缸;4.7挡板滑轨;4.8挡板进退液压缸;5探测部;5.1钻机滑动平台;5.2转动油缸;5.3连接件;5.4关节液压缸;5.5小臂;5.6大臂;5.7调整液压缸一;5.8调整液压缸二;5.9伸缩臂基座;5.10伸缩臂滑台;5.11伸缩油缸。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
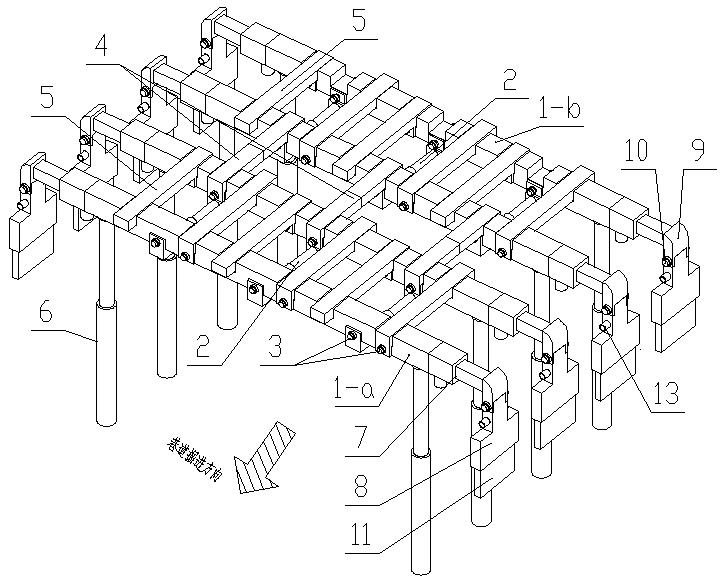
如图1-8所示,本实施例提供一种井下快速掘进的探掘支锚运一体机系统,包括纵轴式掘进机体1,所述纵轴式掘进机体1上设置有双摇臂截割部2、配有自动换杆机构的锚支部3、用于起到临时支护和防护锚支部作用的挡板4、用于预探测的探测部5。
所述双摇臂截割部2包括焊接在所述纵轴式掘进机体1上的摇臂电机固定支架2.6,所述摇臂电机固定支架2.6上固定有摇臂电机2.4,所述摇臂电机2.4通过转动油缸2.5与主摇臂2.3连接,所述主摇臂2.3通过转动副与次摇臂2.2连接,所述转动副通过设置在主摇臂2.3内的传动系统与摇臂电机2.4连接,所述次摇臂2.2上设置有截割电机2.1,所述截割电机2.1上安装有截割头,双摇臂截割部2的转动油缸2.5和摇臂电机2.4协同控制双摇臂机构,使得截割头开始沿S形截割巷道断面。
所述锚支部3包括焊接在所述纵轴式掘进机体1两侧的锚支部底板3.2,所述锚支部底板3.2上通过滑轨连接有进给滑块3.1,所述进给滑块3.1上铰接设置有可上下俯仰的俯仰滑轨3.3,所述俯仰滑轨3.3上对应设置有俯仰滑块3.4,所述俯仰滑轨3.3采用安装在进给滑块3.1上的锚支部俯仰液压缸3.5驱动,所述俯仰滑块3.4上设置有回转电机二3.8,所述回转电机二3.8铰接设置有回转电机一3.6,所述回转电机二3.8上设置有驱动回转电机一3.6上下俯仰的电机液压缸3.7,所述回转电机一3.6通过锚杆钻机滑块3.9连接有锚杆钻机,所述锚杆钻机通过齿轮齿条相对于锚杆钻机滑块3.9滑动,所述锚杆钻机上设置有自动换杆机构3.10,所述自动换杆机构3.10包括与锚杆钻机焊接的换杆机架3.10.6,所述换杆机架3.10.6通过连接板连接有锚杆仓3.10.1,所述连接板上设置有用于驱动锚杆仓3.10.1转动的转仓液压缸3.10.4、与转仓液压缸3.10.4对应的限位液压缸3.10.5,所述锚杆仓3.10.1下部对应设置有焊接在换杆机架3.10.6上的机械爪架3.10.8,所述机械爪架3.10.8通过夹紧液压缸3.10.3与夹紧块3.10.7连接,所述夹紧块3.10.7连接有送杆液压缸3.10.2的一端,所述送杆液压缸3.10.2的另一端与机械爪架3.10.8铰接。
所述挡板4包括焊接在所述纵轴式掘进机体1后侧的挡板底板,所述挡板底板上通过挡板滑轨4.7滑动设置有挡板滑板4.4,所述挡板滑板4.4采用安装在所述挡板底板上的挡板进退液压缸4.8驱动滑动,所述挡板滑板4.4上铰接设置有可上下俯仰的挡板一4.3,所述挡板一4.3采用安装在所述挡板滑板4.4上的挡板俯仰液压缸4.6驱动,所述挡板一4.3上铰接设置有用于起到安装锚网和临时支护作用的挡板二4.2,所述挡板二4.2采用安装在挡板一4.3上的挡板调平液压缸4.5驱动调平;
所述挡板二4.2前部设置有弧形网状结构4.1。
所述挡板一4.3的俯仰与挡板二4.2的调平运动同步运行。
所述挡板一4.3的俯仰幅度为10度到80度,所述挡板二4.2与挡板一4.3之间的调整幅度为120度到180度。
所述探测部5包括固定在所述纵轴式掘进机体1上的固定滑道,所述固定滑道上对应设置有伸缩臂滑台5.10,所述伸缩臂滑台5.10通过设置在纵轴式掘进机体1上的伸缩油缸5.11驱动滑动,所述伸缩臂滑台5.10上设置有伸缩臂基座5.9,所述伸缩臂基座5.9通过调整液压缸一5.7、调整液压缸二5.8与大臂5.6连接,所述大臂5.6与小臂5.5连接,所述小臂5.5通过连接件5.3与转动油缸5.2连接,所述转动油缸5.2连接有钻机滑动平台5.1,所述钻机滑动平台5.1上设置有探测钻机,所述小臂5.5与连接件5.3之间连接有用于调节连接件5.3俯仰程度的关节液压缸5.4。
所述锚支部俯仰液压缸3.5、电机液压缸3.7、挡板调平液压缸4.5、挡板俯仰液压缸4.6、挡板进退液压缸4.8、转动油缸5.2、关节液压缸5.4、调整液压缸一5.7、调整液压缸二5.8、伸缩油缸5.11均采用伺服液压缸,所述回转电机一3.6、回转电机二3.8采用回转编码器控制旋转角度。
本实施例还提供一种使用上述系统的方法,具体包括以下步骤:
(a)将纵轴式掘进机体1行进到巷道断面处,前后支撑撑开,工作人员将锚网放置到挡板二4.2上,挡板一4.3、挡板二4.2在两组液压缸的动作下完成升起、调平的动作,挡板滑板4.4前进,挡板4进行临时支护;
(b)探测部5的伸缩油缸5.11运动带动伸缩臂滑台5.10在固定滑道上运动,进而带动伸缩臂基座5.9的运动,从而使探测钻机前后移动,进行探测,控制转动油缸5.2带动钻机滑动平台5.1旋转进而调整探测钻机探测范围,通过控制调整液压缸一5.7、调整液压缸二5.8调整大臂5.6的位姿,进而带动小臂5.5调整位姿,实现探测钻机的小幅度伸缩,通过控制关节液压缸5.4可以带动连接件5.3实现俯仰动作,进而实现探测电机的俯仰动作,实现探测部的探测;
(c)探测完成后,可以进行截割时,双摇臂截割部2的转动油缸2.5和摇臂电机2.4协同控制双摇臂机构,使得截割头开始沿S形截割巷道断面;
(d)在步骤b进行的同时,锚支部3的进给滑块3.1通过齿轮齿条推动往前运动指定距离,锚支部俯仰液压缸3.5伸长至设定距离,反馈控制其停止伸长,使俯仰滑轨3.3摆动到指定角度,回转电机一3.6、回转电机二3.8、电机液压缸3.7三者共同动作,使得锚杆钻机的位姿至指定位姿,锚杆钻机进行打锚杆的动作,将锚网支护到巷道顶板上;
(e)在截割头完成一轮S形截割断面后,锚支部3的回转电机二3.8逆时针摆动一定角度,自动换杆机构3.10开始运行,转仓液压缸3.10.4运动,带动锚仓杆3.10.1转动到限位液压缸3.10.5限定的角度,夹紧液压缸3.10.3驱动夹紧块3.10.7夹紧锚杆,送杆液压缸3.10.2运行将锚杆输送到锚杆钻机,夹紧块3.10.7松开,打下一根锚杆;
(f)锚支部3完成一个断面上的打锚杆后,挡板滑板4.4后移,挡板滑板4.4退出临时支护,进给滑块3.1前移,进行下一个断面的锚杆支护;
(g)截割头回收到初始位置,锚支部3的进给滑块3.1后退到底,锚支部俯仰液压缸3.5、回转电机一3.6、回转电机二3.8、电机液压缸3.7动作,锚支部3回到初始位置,纵轴式掘进机体1前后支撑缩回,纵轴式掘进机体1前进到下一个巷道断面处,重复步骤a-g动作。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
一种井下快速掘进的探掘支锚运一体机系统及其使用方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0